
Abstract
In this paper, we discuss the dynamics of a stochastic SIQS epidemic model. When the noise is large, the infective decays exponentially to zero regardless of the magnitude of . When the noise is small, sufficient conditions for extinction exponentially and persistence in the mean are established. The results are illustrated by computer simulations.
MSC:34F05, 37H10, 60H10, 92D25, 92D30.
Similar content being viewed by others

1 Introduction
One intervention procedure to control the spread of infectious diseases is to isolate some infectives, in order to reduce transmissions of the infection to susceptibles. Isolation may have been the first infection control method. Over the centuries quarantine has been used to reduce the transmission of human diseases such as leprosy, plague, cholera, typhus, yellow fever, smallpox, diphtheria, tuberculosis, measles, mumps, ebola, and lassa fever. Quarantine has also been used for animal diseases such as rinderpest, foot and mouth, psittacosis, Newcastle disease, and rabies. Studies of epidemic models with quarantine have become an important area in the mathematical theory of epidemiology, and they have largely been inspired by Refs. [1–4].
Hethcote et al. in [5] discuss an SIQS epidemic model:
where parameters A, μ, and β are positive constants, and α, γ, ε, and δ are non-negative constants. Here denotes the number of members who are susceptible to an infection at time t. denotes the number of members who are infective at time t. denotes the number of members who are removed and isolated either voluntarily or coercively from the infectious class. The parameters in the model are summarized in the following list:
A: the recruitment rate of susceptibles corresponding to births and immigration;
β: transmission coefficient between compartments S and I;
μ: the per capita natural mortality rate;
δ: the rate for individuals leaving the infective compartment I for the quarantine compartment Q;
γ: recovery rate of infectious individuals;
ε: the rate at which individuals return to susceptible compartment S from compartments Q;
α: disease-caused death rate of infectious individuals.
In a simple epidemic model, there is generally the basic reproduction number (or the threshold) . If , the disease-free equilibrium is a unique equilibrium in this type of epidemic model and it is globally asymptotically stable; if , this type of model has also a unique endemic equilibrium, which is globally asymptotically stable. The threshold of system (1.1) is
In [5], the system (1.1) always has the disease-free equilibrium . If , then is the unique equilibrium of (1.1) and it is globally stable in invariant set Γ, where
If , then is unstable and there is an endemic equilibrium
which is globally asymptotically stable under a sufficient condition in invariant set Γ.
In fact, epidemic models are inevitably affected by environmental white noise which is an important component in realism, because it can provide an additional degree of realism in comparison to their deterministic counterparts. Many stochastic models for epidemic populations have been developed in [6–17]. Dalal et al. [6] have previously used the technique of parameter perturbation to examine the effect of environmental stochasticity in a model of AIDS and condom use. They found that the introduction of stochastic noise changes the basic reproduction number of the disease and can stabilize an otherwise unstable system. Tornatore et al. [9] propose a stochastic disease model where vaccination is included. They prove existence, uniqueness, and positivity of the solution and the stability of the disease-free equilibrium. Zhao et al. [7] discuss the dynamics of a stochastic SIS epidemic model with vaccination. They obtain the condition of the disease extinction and persistence according to the threshold of the deterministic system and the noise. Ji et al. [10] discuss the SDE SIR model with no delay. They obtain if , then the disease-free equilibrium is stochastically asymptotically stable in the large and exponentially mean-square stable. If , then the solution of the system is fluctuating around , which is the endemic equilibrium of the corresponding deterministic system. The disease will prevail if the white noise is small.
However, compared to deterministic systems, it is difficult to give the threshold of stochastic systems. Recently, Gray et al. in [11] investigate the stochastic SIS epidemic model with fluctuations around the transmission coefficient β. They prove that this model has a unique global positive solution and establish conditions for extinction and persistence of according to the threshold of the stochastic model. In the case of persistence they show the existence of a stationary distribution and derive expressions for its mean and variance. Zhao and Jiang [12] continue to discuss the stochastic SIS epidemic model with vaccination. When the noise is small, they obtain a threshold of the stochastic system which determines the extinction and persistence of the epidemic. Besides, they find that large noise will suppress the epidemic from prevailing.
In this paper, taking into account the effect of randomly fluctuating environment, we assume that fluctuations in the environment will manifest themselves mainly as fluctuations in the parameter β,
where is standard Brownian motions with , and with intensity of white noise . The stochastic version corresponding to the deterministic model (1.1) takes the following form:
This paper is organized as follows. In Section 2, we show there is a unique positive solution of system (1.3). In Section 3, we investigate system (1.3) is exponential stability when the noise is large. In this case, the infective decays exponentially to zero. When the noise is small, we deduce the condition which will enable the disease to die out exponentially in Section 3 and the condition for the disease being persistent is given in Sections 4. Throughout the paper, outcomes of numerical simulations are reported to support the analytical results.
Next, we give some basic theory in stochastic differential equations (see [18]).
Throughout this paper, unless otherwise specified, let be a complete probability space with a filtration satisfying the usual conditions (i.e. it is right continuous and contains all P-null sets). Let
In general, consider the n-dimensional stochastic differential equation
with initial value . denotes n dimensional standard Brownian motion defined on the above probability space. Define the differential operator L associated with (1.4) by
If L acts on a function , then
where , , . By Itô’s formula, if , then
Consider (1.4), assume and for all . So is a solution of (1.4), called the trivial solution or equilibrium position.
2 Existence and uniqueness of positive solution
In this section we first show that the solution of system (1.3) is global and positive. To get a unique global (i.e. no explosion in a finite time) solution for any given initial value, the coefficients of the equation are generally required to satisfy the linear growth condition and local Lipschitz condition (cf. [18]). However, the coefficients of system (1.3) do not satisfy the linear growth condition, though they are locally Lipschitz continuous, so the solution of system (1.3) may explode in finite time. In this section, using the Lyapunov analysis method (mentioned in [11, 14]), we show the solution of system (1.3) is positive and global.
Theorem 2.1 There is a unique solution of system (1.3) on for any initial value , and the solution will remain in with probability 1, namely, for all almost surely.
Proof Since the coefficients of the equation are locally Lipschitz continuous for any given initial value , there is a unique local solution on , where is the explosion time (see [18]). To show this solution is global, we need to show that a.s. Let be sufficiently large so that , , and all lie within the interval . For each integer , define the stopping time
where, throughout this paper, we set (as usual ∅ denotes the empty set). According to the definition, is increasing as . Set , whence a.s. If we can show that a.s., then and a.s. for all . In other words, to complete the proof all we need to show is that a.s. If this statement is false, then there exist a pair of constants and such that
Hence there is an integer such that
For , we can see, for each k,
and so
Define a -function by
The nonnegativity of this function can be seen from , . Let and be arbitrary. Applying the Itô formula, we obtain
where is defined by
The remainder of the proof follows that in Ji et al. [14]. □
Remark 2.1 From Theorem 2.1, for any initial value , there is a unique global solution almost surely of system (1.3). Hence
and
If , then a.s. so the region
is a positively invariant set of system (1.3) on , which is similar to Γ of system (1.1).
From now on, we always assume that .
3 Extinction
In this section, we investigate the conditions for the extinction of the disease. For convenience we introduce the notation:
We first give a useful lemma.
Lemma 3.1 ([18] (Strong Law of Large Numbers))
Let be a real-value continuous local martingale vanishing at . Then
and also
The following is the main theorem of this section.
Theorem 3.1 Let be the solution of system (1.3) with initial value . If
-
(a)
, or
-
(b)
and .
Then
namely, tends to zero exponentially a.s. i.e., the disease will die out with probability one. In addition
Proof An integration of the system (1.3) yields
then we have
We compute that
where is defined by
Obviously , . Applying Itô’s formula to system (1.3) leads to
Integrating this from 0 to t and dividing t on the both sides, we have
Substituting (3.4) into (3.6) yields
where
If the condition (b) is satisfied, we have
Moreover,
By Lemma 3.1 and , , we obtain
It follows from (3.8) and (3.9) that
Conclusion (3.2) is proved.
Next, according to (3.6), we obtain
If the condition (a) is satisfied, we have
Conclusion (3.1) is proved.
According to (3.1) and (3.2), they implies
Next, let us prove the last assertion. We solve the last equation of system (1.3), then
Applying L’Hospital’s rule and (3.10), we get
According to system (1.3), we obtain
then
then
This finishes the proof of Theorem 3.1. □
Remark 3.2 Theorem 3.1 tells us the disease will die out if and the white noise is not large satisfied . Moreover, we notice the conditions for to become extinct in the SDE model (1.3) are weaker than in the corresponding deterministic model. When the white noise is large enough such that is satisfied, the disease will also die out. The following examples illustrate this result more explicitly.
Example 3.3 Throughout the paper we shall assume that the unit of time is one day and the population sizes are measured in units of 1 million. Choose the parameters in system (1.3) as follows:
Note that
then by Theorem 3.1, the solution of system (1.3) obeys
and
with any initial value . That is, will tend to zero exponentially with probability one.
On the other hand, for the corresponding deterministic model (1.1),
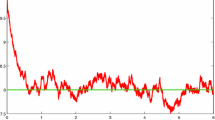
then the endemic equilibrium is globally asymptotically stable in Γ. Using the method mentioned in [19], we give the simulations shown in Figure 1 to support our results.

Computer simulation of the path , , for model ( 1.3 ) and ( 1.1 ) for parameter values , , , , , , and , with step size and initial value .
Example 3.4 We keep all the parameters of (3.11) unchanged but increase σ to 0.6. Note that , then by Theorem 3.1, the solution of system (1.3) obeys
That is, will tend to zero exponentially with probability one. But, for the corresponding deterministic model (1.1), note (3.12), , then the endemic equilibrium is globally asymptotically stable in Γ. Using the method mentioned in [19], we give the simulations shown in Figure 2 to support our results.

Computer simulation of the path , , for model ( 1.3 ) and ( 1.1 ) for parameter values , , , , , , , , and , with step size and initial value .
4 Persistence
Since there is no internal equilibrium model in the stochastic infectious disease model, how to choose the appropriate scale to reflect the widespread prevalence of the disease is a key issue. We first give a definition of persistence in the mean and a lemma to be used in proof.
Definition 4.1 System (1.3) is said to be persistent in the mean, if
Lemma 4.2 [7]
Let and . If there exist positive constants , λ, and T such that
for all , and a.s., then
Theorem 4.1 If and , then for any initial value , the solution of system (1.3) has the following property:
where
Moreover,
and
Proof By the last inequality of (3.7), we have
If and , together with Lemma 4.2 and (3.9), then
On the other hand, substituting (3.4) into the first equality of (3.6), then
We compute that
If and , taking the limit inferior of both sides (4.5) leads to
Combining (4.4) with (4.6), conclusion (4.1) is proved.
Moreover, due to equality (3.4) and inequalities (4.4), (4.6), we have
and
In view of (3.3), (4.3), and (4.4), we get
and
This finishes the proof of Theorem 4.1. □
Remark 4.3 From Theorem 3.1 and Theorem 4.1, we can see when the noise is so small that , then the value of will lead to the disease dying out and the value of will lead to the disease prevailing. So we consider as the threshold of stochastic system (1.3).
Example 4.4 Assume that the parameters of system (1.3) are given by
Note that
then by Theorem 4.1, for any initial value , we conclude that the solution of system (1.3) obeys
That is to say, the disease will prevail.
To further illustrate the effect of the noise intensity σ on the model (1.3), we keep all the parameters of (4.7) unchanged but increase σ to 0.05. Using the method mentioned in [19], we give the simulations to support our results in Figure 3. Comparing the first picture and the second picture in Figure 3, with the noise getting smaller, the fluctuation of the solution of system (1.3) is getting weaker.

Computer simulation of the path , , for model ( 1.3 ) and ( 1.1 ) for parameter values , , , , , , , , and , with step size and initial value .
References
Chen J: Local stability and global stability of SIQS models for disease. J. Biomath. 2004, 19(1):57-64.
Liu X, Chen X, Takeuchi Y: Dynamics of an SIQS epidemic model with transport-related infection and exit-entry screenings. J. Theor. Biol. 2011, 285(1):25-35. 10.1016/j.jtbi.2011.06.025
Chen J: Local stability and global stability of SIQS models for disease. J. Biomath. 2003, 19(1):57-64.
Wang S, Zou D: An SIQS epidemic model with quarantine and variable infection periods. J. Jiangsu Polytech. Univ. 2005, 17(2):54-57.
Hethcote H, Ma Z, Liao S: Effects of quarantine in six endemic models for infectious diseases. Math. Biosci. 2002, 180: 141-160. 10.1016/S0025-5564(02)00111-6
Dalal N, Greenhalgh D, Mao X: A stochastic model of AIDS and condom use. J. Math. Anal. Appl. 2007, 325: 36-53. 10.1016/j.jmaa.2006.01.055
Zhao Y, Jiang D, O’Regan D: The extinction and persistence of the stochastic SIS epidemic model with vaccination. Physica A 2013, 392: 4916-4927. 10.1016/j.physa.2013.06.009
Zhao Y, Jiang D: Dynamics of stochastically perturbed SIS epidemic model with vaccination. Abstr. Appl. Anal. 2013., 2013: Article ID 517439
Tornatore E, Buccellato SM, Vetro P: On a stochastic disease model with vaccination. Rend. Circ. Mat. Palermo 2006, 55(2):223-240. 10.1007/BF02874704
Ji C, Jiang D, Shi N: The behavior of an SIR epidemic model with stochastic perturbation. Stoch. Anal. Appl. 2012, 30: 755-773. 10.1080/07362994.2012.684319
Gray A, Greenhalgh D, Hu L, Mao X, Pan J: A stochastic differential equation SIS epidemic model. SIAM J. Appl. Math. 2011, 71: 876-902. 10.1137/10081856X
Zhao Y, Jiang D: The threshold of a stochastic SIS epidemic model with vaccination. Appl. Math. Comput. 2014, 243: 718-727.
Zhao Y, Jiang D: The threshold of a stochastic SIRS epidemic model with saturated incidence. Appl. Math. Lett. 2014, 34: 90-93.
Ji C, Jiang D, Shi N: Multigroup SIR epidemic model with stochastic perturbation. Physica A 2011, 390: 1747-1762. 10.1016/j.physa.2010.12.042
Tornatore E, Buccellato SM, Vetro P: Stability of a stochastic SIR system. Physica A 2005, 354: 111-126.
Lahrouz A, Omari L: Extinction and stationary distribution of a stochastic SIRS epidemic model with non-linear incidence. Stat. Probab. Lett. 2013, 83(4):960-968. 10.1016/j.spl.2012.12.021
Lahrouz A, Settati A: Asymptotic properties of switching diffusion epidemic model with varying population size. Appl. Math. Comput. 2013, 219(24):11134-11148. 10.1016/j.amc.2013.05.019
Mao X: Stochastic Differential Equations and Applications. Ellis Horwood, Chichester; 1997.
Higham DJ: An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 2001, 43: 525-546. 10.1137/S0036144500378302
Acknowledgements
The work was supported by NSFC grant 11371169 and RFDP 20120061110002.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the manuscript and typed, read, and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

{kind=link}
{kind=link}
{kind=link}
Cite this article
Pang, Y., Han, Y. & Li, W. The threshold of a stochastic SIQS epidemic model. Adv Differ Equ 2014, 320 (2014). https://doi.org/10.1186/1687-1847-2014-320
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-320