
Abstract
This paper gives an analytical proof of the existence of chaotic dynamics for a single-species discrete population model with stage structure and birth pulses. The approach is based on a general existence criterion for chaotic dynamics of n-dimensional maps and inequality techniques. An example is given to illustrate the effectiveness of the result.
Similar content being viewed by others

1 Introduction
Many papers have been published on chaos in discrete models (see [1–11] and references cited therein). However, in most cases, chaotic behaviors they observed were obtained only by numerical simulations and have not been proved rigorously. In 2005, Gao and Chen [10] proposed a single-species discrete population model with stage structure and birth pulses:
where , , , . System (1.1) describes the numbers of immature population and mature population at a pulse in terms of values at the previous pulse. They proved numerically that system (1.1) can be chaotic.
Since numerical simulations may lead to erroneous conclusions, numerical evidence of the existence of chaotic behaviors still needs to be confirmed analytically. Some researchers proved analytically the existence of chaotic behavior of discrete systems under different definitions of chaos (for example, see [12–17]). Recently, Liz and Ruiz-Herrera [12] established a general existence criterion for chaotic dynamics of n-dimensional maps under a new definition of chaos, and they applied it to prove analytically the existence of chaotic dynamics in some classical discrete-time age-structured population models. This novel analytical approach is very effective in detecting chaos of discrete-time dynamical systems.
The main purpose of this paper is to give an analytical proof of the existence of chaotic dynamics of (1.1). To this end, we use the analytical approach for detecting chaos developed by Liz and Ruiz-Herrera [12].
The rest of the paper is organized as follows. In Section 2, some basic definitions and tools are introduced. In Section 3, it is rigorously proved that there exists chaotic behavior in the discrete population model (1.1). Finally, our conclusions are presented in Section 4.
2 Preliminaries
For the reader’s convenience, we give a brief introduction to the main tools and definitions that we use in this paper. For more details, we refer the reader to [12].
In this paper, we denote by ℕ, ℤ, ℝ the set of all positive integers, integers, and real numbers, respectively.
Definition 2.1 [12]
Consider a metric space. We say that a continuous map induces chaotic dynamics on two symbols if there exist two disjoint compact sets such that, for each two-sided sequence , there exists a corresponding sequence such that
and, whenever is a k-periodic sequence (that is, , ) for some , there exists a k-periodic sequence satisfying (2.1).
The following basic facts are listed in [12]:
-
1.
Definition 2.1 guarantees natural properties of complex dynamics, such as sensitive dependence on the initial conditions or the presence of an invariant set Λ being transitive and semi-conjugate with the Bernoulli shift, the existence of periodic points of any period .
-
2.
A map that is chaotic according to Definition 2.1 is also chaotic in the sense of Block and Coppel [18] and in the sense of coin-tossing [19, 20].
We understand chaos in the sense of Definition 2.1. A map that is chaotic according to Definition 2.1 is called chaotic in the sense of Liz and Ruiz-Herrera.
We employ the usual maximum norm in ,
and use the notation for the closed cube centered at .
Definition 2.2 [12]
An h-set is a quadruple consisting of
-
a compact subset N of ,
-
a pair of numbers , with ,
-
a homeomorphism , such that .
In this setting, we employ the notation
Definition 2.3 [12]
Assume that N, M are h-sets, such that and . Let be a continuous map, and define . We say that N f-covers M, and we write it as
if the following conditions are satisfied:
-
1.
There exists a continuous homotopy , such that the following conditions hold true:
-
2.
There exists a linear map , such that for and , and .
Lemma 2.4 [12]
Let be a continuous map and assume that there exist two disjoint h-sets and such that
for all . Then F induces chaotic dynamics on two symbols (with compact sets and ).
Definition 2.5 [12]
Let I be a real interval and a continuous map. We say that g is δ-strictly turbulent if there exist four constants , and so that
3 Chaotic dynamics in the model (1.1)
Associated to (1.1), we define the map in
where , , , .
Denote
Set , then one has
First, we provide a technical lemma, which will play a key role in the proof of the existence of chaotic dynamics.
Lemma 3.1 The first component and the second component of satisfy the following inequalities: for , ,
-
(a)
;
-
(b)
;
-
(c)
.
Proof The first component of has the following expression:
We easily deduce that, for , ,
which implies assertion (a) holds.
On the other hand, for and ,
Now using
we arrive at
which implies assertion (b) holds.
For the second component , noticing that and
we obtain, for , ,
which implies assertion (c) holds. The proof is complete. □
Next, we prove the following result by following the idea of the proof of Theorem 5.1 in [12] with appropriate modifications.
Theorem 3.2 Assume that satisfies the requirement that is δ-strictly turbulent with parameters and . Suppose that , and the following inequalities are fulfilled:
Then induces chaotic dynamics on two symbols relative to
Proof Set
Then we have
From this, it is easy to check that and are h-sets, with
and
where and are the translations according to the vectors
respectively, and
In order to apply Lemma 2.4, it suffices to demonstrate that
for .
We give the proof only for the case . Indeed, consider the homotopy
where .
Define . Then it follows from (a) and (c) of Lemma 3.1 that, for all (),
As , from (b) of Lemma 3.1, we obtain, for all ,
By using (3.1) together with the inequality , we get from (3.4), for all ,
Analogously, as , from (a) of Lemma 3.1, we obtain, for all ,
By using (3.2) together with the inequality , we get from (3.6), for all ,
From inequalities (3.3), (3.5), and (3.7), it follows that, for ,
These properties, together with the expression of A, lead to the conclusion
This leads to the covering relations
It can be similarly verified for the covering relations
taking the linear map . The proof is complete. □
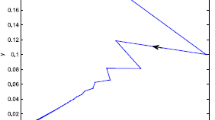
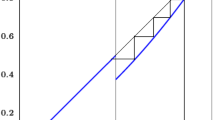
Now we apply Theorem 3.2 in a particular example.
Example 3.3 Take with and , then is 0.545-strictly turbulent with parameters . Straightforward computations show that conditions (3.1), (3.2) in Theorem 3.2 hold for
4 Conclusions
This paper rigorously proves the existence of chaotic dynamics for a single-species discrete population model with stage structure and birth pulses. The result shows that the second composition map of a two-dimensional map associated to this model is chaotic in the sense of Liz and Ruiz-Herrera.
Author’s contributions
The author contributed to the manuscript and read and approved the final manuscript.
References
Moghtadaei M, Hashemi Golpayegani MR, Malekzade R: Periodic and chaotic dynamics in a map-based model of tumor-immune interaction. J. Theor. Biol. 2013, 334: 130–140.
Mazrooei-Sebdani R, Farjami S: Bifurcations and chaos in a discrete-time-delayed Hopfield neural network with ring structures and different internal decays. Neurocomputing 2013, 99: 154–162.
Peng MS, Uçar A: The use of the Euler method in identification of multiple bifurcations and chaotic behavior in numerical approximations of delay differential equations. Chaos Solitons Fractals 2004, 21: 883–891. 10.1016/j.chaos.2003.12.044
Peng MS, Yuan Y: Stability, symmetry-breaking bifurcation and chaos in discrete delayed models. Int. J. Bifurc. Chaos 2008, 18: 1477–1501. 10.1142/S0218127408021117
He ZM, Lai X: Bifurcation and chaotic behavior of a discrete-time predator-prey system. Nonlinear Anal., Real World Appl. 2011, 12: 403–417. 10.1016/j.nonrwa.2010.06.026
Fan DJ, Wei JJ: Bifurcation analysis of discrete survival red blood cells model. Commun. Nonlinear Sci. Numer. Simul. 2009, 14: 3358–3368. 10.1016/j.cnsns.2009.01.015
Tuzinkevich AV: Bifurcations and chaos in a time-discrete integral model of population dynamics. Math. Biosci. 1992, 109: 99–126. 10.1016/0025-5564(92)90041-T
Çelik C, Duman O: Allee effect in a discrete-time predator-prey system. Chaos Solitons Fractals 2009, 40: 1956–1962. 10.1016/j.chaos.2007.09.077
Sun GQ, Zhang G, Jin Z: Dynamic behavior of a discrete modified Ricker & Beverton-Holt model. Comput. Math. Appl. 2009, 57: 1400–1412. 10.1016/j.camwa.2009.01.004
Gao SJ, Chen LS: The effect of seasonal harvesting on a single-species discrete population model with stage structure and birth pulses. Chaos Solitons Fractals 2005, 24: 1013–1023. 10.1016/j.chaos.2004.09.091
Zhao M, Yu HG, Zhu J: Effects of a population floor on the persistence of chaos in a mutual interference host-parasitoid model. Chaos Solitons Fractals 2009, 42: 1245–1250. 10.1016/j.chaos.2009.03.027
Liz E, Ruiz-Herrera A: Chaos in discrete structured population models. SIAM J. Appl. Dyn. Syst. 2012, 11: 1200–1214. 10.1137/120868980
Li ZC, Zhao QL, Liang D: Chaos in a discrete delay population model. Discrete Dyn. Nat. Soc. 2012., 2012: Article ID 482459
Thunberg H: Periodicity versus chaos in one-dimensional dynamics. SIAM Rev. 2001, 43: 3–30. 10.1137/S0036144500376649
Ugarcovici I, Weiss H: Chaotic attractors and physical measures for some density dependent Leslie population models. Nonlinearity 2007, 20: 2897–2906. 10.1088/0951-7715/20/12/008
Shi YM, Chen GR: Chaos of discrete dynamical systems in complete metric spaces. Chaos Solitons Fractals 2004, 22: 555–571. 10.1016/j.chaos.2004.02.015
Shi YM, Yu P: Study on chaos induced by turbulent maps in noncompact sets. Chaos Solitons Fractals 2006, 28: 1165–1180. 10.1016/j.chaos.2005.08.162
Block LS, Coppel WA Lectures Notes in Mathematics. In Dynamics in One Dimension. Springer, Berlin; 1992.
Aulbach B, Kieninger B: On three definitions of chaos. Nonlinear Dyn. Syst. Theory 2001, 1: 23–37.
Kirchgraber U, Stoffer D: On the definition of chaos. Z. Angew. Math. Mech. 1989, 69: 175–185. 10.1002/zamm.19890690703
Acknowledgements
This research is supported by the National Natural Science Foundation of China (Grant No. 10971085). The author also thanks the reviewers for helpful comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Fang, H. Chaos in a single-species discrete population model with stage structure and birth pulses. Adv Differ Equ 2014, 175 (2014). https://doi.org/10.1186/1687-1847-2014-175
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-175