
Abstract
In this paper, we propose a numerical method for solving fractional partial differential equations. This method is based on the homotopy perturbation method and Laplace transform. The transformed problem obtained by means of temporal Laplace transform is solved by the homotopy perturbation method. Then we use Stehfest’s numerical algorithm for calculating inverse Laplace transform to retrieve the time domain solution. The approximate solutions obtained by our proposed method are in excellent agreement with the exact solutions. It is worthwhile to note that our method is applicable to a variety of fractional partial differential equations occurring in fluid mechanics, signal processing, system identification, control robotics, etc. The utility of the method is shown by solving some interesting examples.
MSC:34A08, 44A10.
Similar content being viewed by others
1 Introduction
Fractional differential equations are found to be an effective tool to describe certain physical phenomena such as damping laws, rheology, diffusion processes, and so on. Several methods have been developed to solve fractional differential equations. Lin and Xu [1] proposed the numerical solution for a time-fractional diffusion equation. In [2], an unconditionally stable finite element (FEM) approach for solving a one-dimensional Caputo-type fractional differential equation with singularity at the boundary was presented. Kexue and Jigen [3] discussed the Laplace transform (LT) method for solving fractional differential equations with constant coefficients. Jafari et al. [4] applied the homotopy analysis method to obtain the solution of a multi-order fractional differential equation in the Caputo sense. Merrikh-Bayat [5] developed a low-cost numerical algorithm to find the series solution of nonlinear fractional differential equations with delay. In [6], the Riemann-Liouville fractional integral for repeated fractional integration was expanded in block pulse functions to yield the block pulse operational matrices for the fractional order integration. Esmaeili et al. [7] developed a computational technique based on the collocation method and Muntz polynomials for the solution of fractional differential equations. In [8], three different numerical methods were used to solve a singularly perturbed Able Volterra integral equation, presented by a fractional differential equation. Ibrahim [9] discussed holomorphic solutions for nonlinear singular fractional differential equations.
Homotopy perturbation method (HPM) has been applied by several researchers to solve different kinds of functional equations. This method was further developed and improved by He [10] and applied to develop a coupling method for a homotopy technique [11], limit cycle and bifurcation of nonlinear problems [12], nonlinear wave equation [13], boundary value problems [14], chemical kinetics system [15], oscillators with discontinuities [16], Riccati equation with fractional orders [17], neutron transport equation [18], nonlinear singular fourth order four-point boundary value problems [19], systems of partial differential equations [20], nonlinear ill-posed operator equations [21] and stiff systems of ordinary differential equations [22].
The Laplace transform method has been applied to a wide class of ordinary differential equations (ODEs), partial differential equations (PDEs), integral equations (IEs) and integro-differential equations (IDEs). In these problems it is necessary to calculate the Laplace transform and inverse Laplace transform of certain functions. The inverse of Laplace transform is usually difficult to compute by using the techniques of complex analysis, and there exist numerous numerical methods for its evaluation [23, 24]. Sastre et al. [25] developed an application of Laguerre matrix polynomial series to the numerical inversion of Laplace transforms of matrix functions. Laguerre matrix polynomials were introduced in [26] and theorems for the expansion of matrix functions in series of Laguerre matrix polynomials can be found in [27, 28]. In [29], the dynamical differential equations with initial conditions were converted into the model of linear operator action, in which the linear operator is just the infinitesimal generator for the solver of the differential equations, and the resolvent of the linear operator is the Laplace transform of the solver of original differential equations. In [30], a method for the numerical inversion of Laplace transform on the real line of heavytailed (probability) density functions is presented. The method assumes a finite set of real values of the Laplace transform and chooses the analytical form of the approximant maximizing Shannon-entropy, so that positivity of the approximant itself is guaranteed. In [31], a Laplace homotopy perturbation method is employed for solving one-dimensional non-homogeneous partial differential equations with a variable coefficient. This method is a combination of the Laplace transform and the homotopy perturbation method (LHPM). LHPM presents an accurate methodology to solve non-homogeneous partial differential equations with a variable coefficient. Sheng et al. [32] proposed an application of numerical inverse Laplace transform algorithms and obtained an easy way to solve the complicated fractional-order differential equations numerically. Weeks numerical inversion of Laplace transform algorithm was established by using the Laguerre expansion and bilinear transformations [33]. The authors of [34] developed an accurate numerical inversion of Laplace transforms. Tagliani [35] proposed a numerical method for inversion of Laplace transform with probability densities. The maximum entropy technique provides an analytical form of the approximate solution. Fractional moments are mainly investigated. Entropy and cross-entropy convergence are proved. Valko et al. [36] proposed a new algorithm for the numerical inversion of Laplace transforms by using multi-precision computational environment and provided controlled accuracy, that is, the inversion can be carried out to yield any pre-specified number of significant digits. The fundamental collocation method was extended to handle two-dimensional transient heat conduction problems in solids in [37]. The method was applied in the Laplace transform domain, followed by an inversion technique to retrieve the time-domain solution. In [38], the authors developed a numerical algorithm for inverting a Laplace transform, based on Laguerre polynomial series expansion of the inverse function under the assumption that the Laplace transform is known on the real axis only. The main contribution of the paper is to provide computable estimates of truncation, discretization, conditioning and roundoff errors introduced by numerical computations. In the present work, we apply the Stehfest [39] algorithm for numerical inversion of Laplace transform.
In this paper, the method for numerical solution of fractional partial differential equations is based on Laplace transform (LT), the homotopy perturbation method (HPM) and Stehfest’s numerical algorithm for calculating inverse Laplace transform. The accuracy and efficiency of the method is verified by solving some examples of physical interest.
2 Homotopy perturbation technique
In this section, we describe the homotopy perturbation method [10–16] for a general type of the nonlinear differential equation with boundary conditions
where A is a general differential operator, B is a boundary operator, is a known analytical function and Γ is the boundary of the domain Ω. The operator A can be divided into two parts L and N, where L is a linear operator and N is a nonlinear operator. Therefore, Eq. (1) can be rewritten as follows:
By the homotopy technique, we define a homotopy as follows:
or
where is an embedding parameter, and is an initial approximation for Eq. (1) with
Note that the process of varying the values of p from zero to unity corresponds to that of from to . We assume that the solution of Eq. (1) can be written as a power series in p, that is,
Substituting (7) in (5) and comparing the coefficients of powers of p yields a successive procedure to determine . Finally, by setting in (7), we obtain the solution of Eq. (1).
3 Preliminaries
In this section, we recall some basic concepts of fractional calculus [40–44] and Laplace transform.
Definition 1 For , a function is said to be in the space if it can be written as with , , and it is said to be in the space if for .
Definition 2 The Riemann-Liouville fractional integral of order for a function with is defined as
Definition 3 The Riemann-Liouville fractional derivative of order for a function with is defined as
Definition 4 The Caputo fractional derivative of order for a function with is defined as
Definition 5 A two-parameter Mittag-Leffler function is defined by the following series:
Observe that , .
Definition 6 The Laplace transform of a function , , denoted by , is defined by
where s is the transform parameter and is assumed to be real and positive.
Note that the Laplace transform of Mittag-Leffler function is
The Laplace transform of can be found as follows:
4 Description of the method
Consider the following linear fractional partial differential equation:
with the initial conditions
and the boundary conditions
where , , h, , , A and B are known functions and is a real number and . Now we explain the method of solution for solving initial-boundary value problem (15)-(17).
Taking the Laplace transform of problem (15)-(17) and using (14), we obtain
where and denote the Laplace transform of and , respectively, and
Rewriting Eq. (18), we have
According to HPM, we construct a homotopy for Eq. (20) as follows:
Then the solution of Eq. (21) can be expressed as
where , , are the unknown functions. Substituting (22) in (21), we get
which, on comparing the coefficients of powers of p, yields
In the limit , we note that (24) becomes the approximate solution for the problem of (15)-(17) and is given by
Taking the inverse Laplace transform of (25), we obtain
Applying Stehfest’s algorithm [39] to , the solution is found to be
where p is a positive integer and
Here denotes the integer part of the real number r.
5 Numerical results
In this section, we show the efficiency and accuracy of the new Laplace homotopy perturbation method (LHPM) by applying it to several test problems.
Example 1 Consider the following initial-boundary value problem [45].
We know that the exact solution of this problem is
By using the method developed in the previous section (24), we find that
and so on. By (25), we get
Taking the inverse Laplace transform of (31), the approximate solution of (27)-(28) is given by
which, on taking the limit , yields
Table 1 shows the absolute errors using the LHPM with , , for various values of x and t. Clearly, it follows from the table that the numerical solutions are in good agreement with the exact solution.
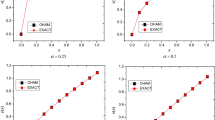
In Figure 1, we plot the logarithm of absolute errors obtained by the LHPM at with , for various values of t. In Figure 2, we plot the numerical solution and the exact solution at with , for various values of α and t.

Logarithm of absolute errors obtained by the LHPM at with , for various values of t .

The numerical solution and the exact solution at with , for various values of α and t .
Example 2 Let us consider the following fractional differential equation [45].
with the initial condition
and the boundary conditions
The exact solution of the given problem is given by
By using the method presented in Section 4, namely (24), we obtain
and so on.
As before, by using (25), we obtain
Taking the inverse Laplace transform of (39) and taking the limit , the approximate solution for problem (34)-(36) is given by
In Table 2, we list the absolute errors using the LHPM with , , for various values of x and t. It can easily be seen from the table that the numerical solutions are in good agreement with the exact solution.
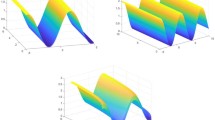
In Figure 3, we plot the logarithm of absolute errors obtained by the LHPM at with , for various values of t. In Figure 4, we plot the exact solution and the numerical solution obtained by the LHPM with for , , for various values of t. As we see from Figure 4, the numerical solutions are in good agreement with the exact solution as the value of n is increased.

Logarithm of absolute errors obtained by the LHPM at with , for various values of t .

The exact solution and the numerical solution obtained by the LHPM with for , , for various values of t .
Example 3 Consider the fractional differential equation [46]
with the initial condition
and the boundary conditions
The exact solution for this problem is
Following the method of Section 4 (24), we find that
By means of (25), we obtain
Taking the inverse Laplace transform of (46), the approximate solution of (41)-(43) is found to be
which, on taking the limit , gives
In Table 3, we list the absolute errors using the LHPM with , , for various values of x and t. It follows from the table that the numerical solutions are in good agreement with the exact solution.
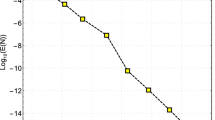
In Figure 5, we plot the logarithm of absolute errors obtained by the LHPM at with , for various values of t. In Figure 6, we plot the exact solution and the numerical solution obtained by the LHPM with for , , for various values of t. Clearly, the numerical solutions are in good agreement with the exact solution as the value of n is increased.

Logarithm of absolute errors obtained by the LHPM at with , for various values of t .

The exact solution and the numerical solution obtained by the LHPM with for , , for various values of t .
Example 4 Consider the fractional differential equation
with the initial condition
and the boundary conditions
The exact solution for this problem is
Taking the Laplace transform of problem (49)-(52) and using (24), we obtain
where and denote the Laplace transform of and , respectively, and
According to HPM, we construct a homotopy for Eq. (53) as follows:
Following the method of Section 4 (24), we find that
and so on.
By means of (25), we obtain
Taking the inverse Laplace transform of (56), the approximate solution of (49)-(51) is found to be
In Table 4, we list the absolute errors using the LHPM with , , for various values of t. It follows from the table that the numerical solutions are in good agreement with the exact solution.
6 Conclusions
In this paper, we have developed a new numerical method for solving fractional partial differential equations. This method is based on Laplace transform, the homotopy perturbation method and Stehfest’s numerical algorithm for calculating inverse Laplace transform. We demonstrate the efficiency and accuracy of the proposed method by applying it to three typical examples. It is found that the approximate solutions produced by our method are in complete agreement with the corresponding exact solutions. Moreover, in view of its simplicity, our method is applicable to a wide class of initial-boundary value problems occurring in applied sciences.
References
Lin Y, Xu C: Finite difference/spectral approximations for the time-fractional diffusion equation. J. Comput. Phys. 2007, 225: 1533-1552. 10.1016/j.jcp.2007.02.001
Huang Q, Huang G, Zhan H: A finite element solution for the fractional advection-dispersion equation. Adv. Water Resour. 2008, 31: 1578-1589. 10.1016/j.advwatres.2008.07.002
Kexue L, Jigen P: Laplace transform and fractional differential equations. Appl. Math. Lett. 2011, 24: 2019-2023. 10.1016/j.aml.2011.05.035
Jafari H, Das S, Tajadodi H: Solving a multi-order fractional differential equation using homotopy analysis method. J. King Saud Univ., Sci. 2011, 23: 151-155. 10.1016/j.jksus.2010.06.023
Merrikh-Bayat F: Low-cost numerical algorithm to find the series solution of nonlinear fractional differential equations with delay. Proc. Comput. Sci. 2011, 3: 227-231.
Li Y, Sun N: Numerical solution of fractional differential equations using the generalized block pulse operational matrix. Comput. Math. Appl. 2011, 62(3):1046-1054. 10.1016/j.camwa.2011.03.032
Esmaeili S, Shamsi M, Luchko Y: Numerical solution of fractional differential equations with a collocation method based on Müntz polynomials. Comput. Math. Appl. 2011, 62(3):918-929. 10.1016/j.camwa.2011.04.023
Erjaee GH, Taghvafard H, Alnasr M: Numerical solution of the high thermal loss problem presented by a fractional differential equation. Commun. Nonlinear Sci. Numer. Simul. 2011, 16: 1356-1362. 10.1016/j.cnsns.2010.06.031
Ibrahim RW: On holomorphic solutions for nonlinear singular fractional differential equations. Comput. Math. Appl. 2011, 62(3):1084-1090. 10.1016/j.camwa.2011.04.037
He JH: Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng. 1999, 178: 257-262. 10.1016/S0045-7825(99)00018-3
He JH: A coupling method of a homotopy technique and a perturbation technique for non-linear problems. Int. J. Non-Linear Mech. 2000, 35(1):37-43. 10.1016/S0020-7462(98)00085-7
He JH: Limit cycle and bifurcation of nonlinear problems. Chaos Solitons Fractals 2005, 26(3):827-833. 10.1016/j.chaos.2005.03.007
He JH: Application of homotopy perturbation method to nonlinear wave equations. Chaos Solitons Fractals 2005, 26(3):695-700. 10.1016/j.chaos.2005.03.006
He JH: Homotopy perturbation method for solving boundary problems. Phys. Lett. A 2006, 350(1-2):87-88. 10.1016/j.physleta.2005.10.005
Aminikhah H: An analytical approximation to the solution of chemical kinetics system. Journal of King Saud University Science 2011, 23: 167-170. 10.1016/j.jksus.2010.07.003
He JH: The homotopy perturbation method for non-linear oscillators with discontinuities. Appl. Math. Comput. 2004, 151(1):287-292. 10.1016/S0096-3003(03)00341-2
Khan NA, Ara A, Jamil M: An efficient approach for solving the Riccati equation with fractional orders. Comput. Math. Appl. 2011, 61: 2683-2689. 10.1016/j.camwa.2011.03.017
Martin O: A homotopy perturbation method for solving a neutron transport equation. Appl. Math. Comput. 2011, 217: 8567-8574. 10.1016/j.amc.2011.03.093
Li XY, Wu BY: A novel method for nonlinear singular fourth order four-point boundary value problems. Comput. Math. Appl. 2011, 62: 27-31. 10.1016/j.camwa.2011.04.029
Biazar J, Eslami M: A new homotopy perturbation method for solving systems of partial differential equations. Comput. Math. Appl. 2011, 62: 225-234. 10.1016/j.camwa.2011.04.070
Cao L, Han B: Convergence analysis of the homotopy perturbation method for solving nonlinear ill-posed operator equations. Comput. Math. Appl. 2011, 61: 2058-2061. 10.1016/j.camwa.2010.08.069
Aminikhah H, Hemmatnezhad M: An effective modification of the homotopy perturbation method for stiff systems of ordinary differential equations. Appl. Math. Lett. 2011, 24: 1502-1508. 10.1016/j.aml.2011.03.032
Cohen AM: Numerical Methods for Laplace Transform Inversion. Springer, Berlin; 2007.
Davies B, Martin B: Numerical inversion of Laplace transform: a survey and comparison of methods. J. Comput. Phys. 1979, 33: 1-32. 10.1016/0021-9991(79)90025-1
Sastre J, Defez E, Jodar L: Application of Laguerre matrix polynomials to the numerical inversion of Laplace transforms of matrix functions. Appl. Math. Lett. 2011, 24: 1527-1532. 10.1016/j.aml.2011.03.039
Jódar L, Company R, Navarro E: Laguerre matrix polynomials and systems of second order differential equations. Appl. Numer. Math. 1994, 15: 53-63. 10.1016/0168-9274(94)00012-3
Sastre J, Defez E, Jódar L: Laguerre matrix polynomials series expansion: theory and computer applications. Math. Comput. Model. 2006, 44: 1025-1043. 10.1016/j.mcm.2006.03.006
Sastre J, Jódar L: On Laguerre matrix polynomials series. Util. Math. 2006, 71: 109-130.
Suying Z, Minzhen Z, Zichen D, Wencheng L: Solution of nonlinear dynamic differential equations based on numerical Laplace transform inversion. Appl. Math. Comput. 2007, 189: 79-86. 10.1016/j.amc.2006.11.064
Tagliani A, Velasquez Y: Numerical inversion of the Laplace transform via fractional moments. Appl. Math. Comput. 2003, 143: 99-107. 10.1016/S0096-3003(02)00349-1
Madani M, Fathizadeh M, Khan Y, Yildirim A: On the coupling of the homotopy perturbation method and Laplace transformation. Math. Comput. Model. 2011, 53: 1937-1945. 10.1016/j.mcm.2011.01.023
Sheng H, Li Y, Chen Y: Application of numerical inverse Laplace transform algorithms in fractional calculus. J. Franklin Inst. 2011, 348: 315-330. 10.1016/j.jfranklin.2010.11.009
Weeks WT: Numerical inversion of Laplace transforms using Laguerre functions. J. ACM 1966, 13(3):419-429. 10.1145/321341.321351
Talbot A: The accurate numerical inversion of Laplace transforms. J. Appl. Math. 1979, 23(1):97-120.
Tagliani A: Numerical inversion of Laplace transform on the real line from expected values. Appl. Math. Comput. 2003, 134: 459-472. 10.1016/S0096-3003(01)00294-6
Valko PP, Abate J: Numerical Laplace inversion in rheological characterization. J. Non-Newton. Fluid Mech. 2004, 116: 395-406. 10.1016/j.jnnfm.2003.11.001
Mahajerin E, Burgess G: A Laplace transform-based fundamental collocation method for two-dimensional transient heat flow. Appl. Therm. Eng. 2003, 23: 101-111. 10.1016/S1359-4311(02)00138-2
Cuomo S, D’Amore L, Murli A, Rizzardi M: Computation of the inverse Laplace transform based on a collocation method which uses only real values. J. Comput. Appl. Math. 2007, 198: 98-115. 10.1016/j.cam.2005.11.017
Stehfest H: Algorithm 368: numerical inversion of Laplace transform. Commun. ACM 1970, 13(1):47-49. 10.1145/361953.361969
Podlubny I: Fractional Differential Equations. An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications. Academic Press, San Diego; 1999.
Diethelm K: The Analysis of Fractional Differential Equations. Springer, Berlin; 2010.
Kilbas AA, Srivastava HM, Trujillo JJ North-Holland Mathematics Studies 204. In Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam; 2006.
Kiryakova V Pitman Research Notes in Math. 301. In Generalized Fractional Calculus and Applications. Longman, Harlow; 1994.
Miller KS, Ross B: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York; 1993.
Karimi-Vanani S, Aminataei A: Tau approximate solution of fractional partial differential equations. Comput. Math. Appl. 2011, 62(3):1075-1083. 10.1016/j.camwa.2011.03.013
Moaddy K, Momani S, Hashim I: The non-standard finite difference scheme for linear fractional PDEs in fluid mechanics. Comput. Math. Appl. 2011, 61: 1209-1216. 10.1016/j.camwa.2010.12.072
Acknowledgements
The authors thank the reviewers for their constructive remarks that led to the improvement of the original manuscript. The research of Bashir Ahmad was partially supported by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah, Saudi Arabia.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Each of the authors, MJ and BA contributed to each part of this work equally and read and approved the final version of the manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Javidi, M., Ahmad, B. Numerical solution of fractional partial differential equations by numerical Laplace inversion technique. Adv Differ Equ 2013, 375 (2013). https://doi.org/10.1186/1687-1847-2013-375
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-375