
Abstract
This paper addresses decentralized exponential stability problem for a class of linear large-scale systems with time-varying delay in interconnection. The time delay is any continuous function belonging to a given interval, but not necessarily differentiable. By constructing a suitable augmented Lyapunov-Krasovskii functional combined with Leibniz-Newton’s formula, new delay-dependent sufficient conditions for the existence of decentralized exponential stability are established in terms of LMIs. Numerical examples are given to show the effectiveness of the obtained results.
Similar content being viewed by others


1 Introduction
The theory and applications of functional differential equations form an important part of modern non-linear dynamics. Such equations are natural mathematical models for various real life phenomena where the after-effects are intrinsic features of their functioning. In recent years, functional differential equations have been used to model processes in different areas such as population dynamics and ecology, physiology and medicine, economics, and other natural sciences. Stability analysis of linear systems with time-varying delays is fundamental to many practical problems and has received considerable attention [1–4]. Most of the known results on this problem are derived assuming only that the time-varying delay is a continuously differentiable function, satisfying some boundedness condition on its derivative: . In delay-dependent stability criteria, the main concern is to enlarge the feasible region of stability criteria in a given time-delay interval. Interval time-varying delay means that a time delay varies in an interval in which the lower bound is not restricted to being zero. By constructing a suitable augmented Lyapunov functional and utilizing free weight matrices, some less conservative conditions for asymptotic stability are derived in [5–10] for systems with time delay varying in an interval. However, the shortcoming of the method used in these works is that the delay function is assumed to be differential and its derivative is still bounded: .
On the other hand, there has been a considerable research interest in large-scale interconnected systems. A typical large-scale interconnected system such as a power grid consists of many subsystems and individual elements connected together to form a large, complex network capable of generating, transmitting and distributing electrical energy over a large geographical area. In general, a large-scale system can be characterized by a large number of variables representing the system, a strong interaction between subsystem variables, and a complex interaction between subsystems. The problem of decentralized control of large-scale interconnected dynamical systems has been receiving considerable attention, because there is a large number of large-scale interconnected dynamical systems in many practical control problems, e.g., transportation systems, power systems, communication systems, economic systems, social systems, and so on [11–14]. The operation of large-scale interconnected systems requires the ability to monitor and stabilize in the face of uncertainties, disturbances, failures and attacks through the utilization of internal system states. However, even with the assumption that all the state variables are available for feedback control, the task of effective controlling a large-scale interconnected system using a global (centralized) state feedback controller is still not easy as there is a necessary requirement for information transfer between the subsystems [15–18].
To the best of our knowledge, there has been no investigation on the exponential stability of large-scale systems with time-varying delays interacted between subsystems. In fact, this problem is difficult to solve; particularly, when the time-varying delays are interval, non-differentiable and the output is subjected to such time-varying delay functions. The time delay is assumed to be any continuous function belonging to a given interval, which means that the lower and upper bounds for the time-varying delay are available, but the delay function is bounded but not necessarily differentiable. This allows the time-delay to be a fast time-varying function and the lower bound is not restricted to being zero. It is clear that the application of any memoryless feedback controller to such time-delay systems would lead to closed loop systems with interval time-varying delays. The difficulties then arise when one attempts to derive exponential stability conditions. Indeed, the existing Lyapunov-Krasovskii functional and associated results in [11, 14, 15, 18–35] cannot be applied to solve the problem posed in this paper as they would either fail to cope with the non-differentiability aspects of the delays, or lead to very complex matrix inequality conditions, and any technique such as matrix computation or transformation of variables fails to extract the parameters of the memoryless feedback controllers. This has motivated our research.
In this paper, we consider a class of large-scale linear systems with interval time-varying delays in interconnections. Compared to the existing results, our result has its own advantages. (i) Stability analysis of previous papers reveals some restrictions: The time delay was proposed to be either time-invariant interconnected or the lower delay bound is restricted to being zero, or the time delay function should be differential and its derivative is bounded. In our result, the above restricted conditions are removed for the large-scale systems. In addition, the time delay is assumed to be any continuous function belonging to a given interval, which means that the lower and upper bounds for the time-varying delay are available, but the delay function is bounded but not necessarily differentiable. This allows the time-delay to be a fast time-varying function, and the lower bound is not restricted to being zero. (ii) The developed method using new inequalities for lower bounding cross terms eliminates the need for over-bounding and provides larger values of the admissible delay bound. We propose a set of new Lyapunov-Krasovskii functionals, which are mainly based on the information of the lower and upper delay bounds. (iii) The conditions will be presented in terms of the solution of LMIs that can be solved numerically in an efficient manner by using standard computational algorithms [36].
The paper is organized as follows. Section 2 presents definitions and some well-known technical propositions needed for the proof of the main results. Main result for decentralized exponential stability of large-scale systems is presented in Section 3. Numerical examples showing the effectiveness of the obtained results are given in Section 4. The paper ends with conclusions and cited references.
2 Preliminaries
The following notations are used in this paper. denotes the set of all real non-negative numbers; denotes the n-dimensional space with the scalar product and the vector norm ; denotes the space of all matrices of -dimensions; denotes the transpose of matrix A; A is symmetric if ; I denotes the identity matrix; denotes the set of all eigenvalues of A; ; denotes the set of all -valued differentiable functions on ; stands for the set of all square-integrable -valued functions on . , ; denotes the set of all -valued continuous functions on ; matrix A is called semi-positive definite () if for all ; A is positive definite () if for all ; means . ∗ denotes the symmetric term in a matrix.
Consider a class of linear large-scale systems with interval time-varying delays composed of N interconnected subsystems of the form
where , , is the state vector, the system matrices , are of appropriate dimensions.
The time delays are continuous and satisfy the following condition:
and the initial function , , with the norm
Definition 2.1 Given . The zero solution of system (2.1) is α-exponentially stable if there exists a positive number such that every solution satisfies the following condition:
We end this section with the following technical well-known propositions, which will be used in the proof of the main results.
Proposition 2.1 For any and positive definite matrix , we have
Proposition 2.2 (Schur complement lemma [37])
Given constant matrices X, Y, Z with appropriate dimensions satisfying . Then if and only if
Proposition 2.3 [38]
For any constant matrix and scalar h, , such that the following integrations are well defined, then
3 Main results
In this section, we investigate the decentralized exponential stability of linear large-scale system (2.1) with interval time-varying delays. It will be seen from the following theorem that neither free-weighting matrices nor any transformation are employed in our derivation. Before introducing the main result, the following notations of several matrix variables are defined for simplicity
The following is the main result of the paper, which gives sufficient conditions for the decentralized exponential stability of linear large-scale system (2.1) with interval time-varying delays. Essentially, the proof is based on the construction of Lyapunov Krasovskii functions satisfying the Lyapunov stability theorem for a time-delay system [37].
Theorem 3.1 Given . System (2.1) is α-exponentially stable if there exist symmetric positive definite matrices , , , , , , and matrices , , , such that the following LMI holds:
Moreover, the solution of the system satisfies
Proof We consider the following Lyapunov-Krasovskii functional for system (2.1):
where
It is easy to verify that
Taking the derivative of V in t along the solution of system (2.1), we have
Applying Proposition 2.3 and the Leibniz-Newton formula
we have
Note that
Using Proposition 2.3 gives
Since , we have
then
Similarly, we have
Note that when or , we have
respectively. Besides, using Proposition 2.3 again, we have
Hence,
Therefore, we have
By using the following identity relation:
we have
Adding all the zero items of (3.4) into (3.3), we obtain
Applying Proposition 2.1, we obtain
Therefore, applying inequalities (3.5) and noting that
we have
where .
By condition (3.1), we obtain
Integrating both sides of (3.6) from 0 to t, we obtain
Furthermore, taking condition (3.2) into account, we have
then
This completes the proof of the theorem. □
Remark 3.1 Theorem 3.1 provides sufficient conditions for linear large-scale system (2.1) in terms of the solutions of LMIs, which guarantees the closed-loop system to be exponentially stable with a prescribed decay rate α. The developed method using new inequalities for lower bounding cross terms eliminates the need for over-bounding and provides larger values of the admissible delay bound. Note that the time-varying delays are non-differentiable; therefore, the methods proposed in [11, 14, 15, 18–35] are not applicable to system (2.1). LMI condition (3.2) depends on parameters of the system under consideration as well as the delay bounds. The feasibility of the LMIs can be tested by the reliable and efficient Matlab LMI Control Toolbox [36].
4 Numerical examples
In this section, we give a numerical example to show the effectiveness of the proposed result.
Example 4.1 This example is a large-scale model composed of two machine subsystems as follows:
where the absolute rotor angle and angular velocity of the machine in each subsystem are denoted by and , respectively; the i th system coefficient ; the modulus of the transfer admittance ; the initial input ; the time-varying delays between the two machines in the subsystem:
It is worth nothing that the delay functions , are non-differentiable; therefore, the methods in [11, 14, 15, 18–35] are not applicable to this system. By using LMI Toolbox in Matlab [36], LMIs (3.1) is feasible with , , , and
According to Theorem 3.1, the system is exponentially stable. Finally, the solution of the system satisfies
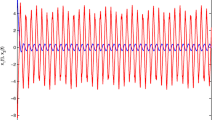
Figure 1 shows the trajectories of and of the closed loop system with the initial conditions , .

The trajectories of a solution of the linear large-scale system.
The trajectories of a solution of the linear large-scale system are shown in Figure 1, respectively.
5 Conclusion
In this paper, the problem of the decentralized exponential stability for large-scale time-varying delay systems has been studied. The time delay is assumed to be a function belonging to a given interval, but not necessarily differentiable. By effectively combining an appropriate Lyapunov functional with the Newton-Leibniz formula and free-weighting parameter matrices, this paper has derived new delay-dependent conditions for the exponential stability in terms of linear matrix inequalities, which allow simultaneous computation of two bounds that characterize the exponential stability rate of the solution. The developed method using new inequalities for lower bounding cross terms eliminates the need for over-bounding and provides larger values of the delay bound. Numerical examples are given to show the effectiveness of the obtained result.
References
de Oliveira MC, Geromel JC, Hsu L: LMI characterization of structural and robust stability: the discrete-time case. Linear Algebra Appl. 1999, 296: 27-38. 10.1016/S0024-3795(99)00086-5
Phat VN, Nam PT: Exponential stability and stabilization of uncertain linear time-varying systems using parameter dependent Lyapunov function. Int. J. Control 2007, 80: 1333-1341. 10.1080/00207170701338867
Rajchakit G: Robust stability and stabilization of nonlinear uncertain stochastic switched discrete-time systems with interval time-varying delays. Appl. Math. Inform. Sci. 2012, 6: 555-565.
Sun YJ: Global stabilizability of uncertain systems with time-varying delays via dynamic observer-based output feedback. Linear Algebra Appl. 2002, 353: 91-105. 10.1016/S0024-3795(02)00292-6
Kwon OM, Park JH: Delay-range-dependent stabilization of uncertain dynamic systems with interval time-varying delays. Appl. Math. Comput. 2009, 208: 58-68. 10.1016/j.amc.2008.11.010
Shao H: New delay-dependent stability criteria for systems with interval delay. Automatica 2009, 45: 744-749. 10.1016/j.automatica.2008.09.010
Sun J, Liu GP, Chen J, Rees D: New delay-dependent conditions for the robust stability of linear polytopic discrete-time systems. J. Comput. Anal. Appl. 2011, 13: 463-469.
Zhang W, Cai X, Han Z: Robust stability criteria for systems with interval time-varying delay and nonlinear perturbations. J. Comput. Appl. Math. 2010, 234: 174-180. 10.1016/j.cam.2009.12.013
Gu K: An integral inequality in the stability problem of time delay systems. In IEEE Control Systems Society and Proceedings of IEEE Conference on Decision and Control. IEEE Publisher, New York; 2000.
Wang Y, Xie L, de Souza CE: Robust control of a class of uncertain nonlinear systems. Syst. Control Lett. 1992, 199: 139-149.
Diblik J, Dzhalladova I, Ruzickova M: The stability of nonlinear differential systems with random parameters. Abstr. Appl. Anal. 2012., 2012: Article ID 924107 10.1155/2012/924107
Bastinec J, Diblik J, Khusainov DY, Ryvolova A: Exponential stability and estimation of solutions of linear differential systems of neutral type with constant coefficients. Bound. Value Probl. 2010., 2010: Article ID 956121 10.1155/2010/956121
Siljak DD: Large Scale Dynamic Systems: Stability and Structure. North Holland, Amsterdam; 1978.
Mahmoud MS: Decentralized reliable control of interconnected systems with time-varying delays. J. Optim. Theory Appl. 2009, 143: 497-518. 10.1007/s10957-009-9571-y
Rajchakit G: Switching design for the asymptotic stability and stabilization of nonlinear uncertain stochastic discrete-time systems. Int. J. Nonlinear Sci. Numer. Simul. 2013, 14: 33-44. 10.1515/ijnsns-2011-0176
Mahmoud MS: Improved stability and stabilization approach to linear interconnected time-delay systems. Optim. Control Appl. Methods 2010, 31: 81-92. 10.1002/oca.884
Oucheriah S: Decentralized stabilization of large-scale systems with time-varying multiple delays in the interconnections. Int. J. Control 2000, 73: 1213-1223. 10.1080/002071700417858
Hua CC, Wang QG, Guan XP: Exponential stabilization controller design for interconnected time delay systems. Automatica 2008, 44: 2600-2606. 10.1016/j.automatica.2008.02.010
Zong GD, Wu YQ: Exponential stability of a class of switched and hybrid systems. Proc. IEEE on Contr. Aut. Robotics and Vision, Kuming, China 2004, 244-249.
Rajchakit G: Delay-dependent optimal guaranteed cost control of stochastic neural networks with interval nondifferentiable time-varying delays. Adv. Differ. Equ. 2013., 2013: Article ID 241 10.1186/1687-1847-2013-241
Lien CH, Yu KW, Chung YJ, Chang HC, Chung LY, Chen JD: Switched signal design for global exponential stability of uncertain switched nonlinear systems with time-varying delays. Nonlinear Anal. Hybrid Syst. 2011, 5: 10-19. 10.1016/j.nahs.2010.08.002
Ratchagit K, Phat VN: Stability and stabilization of switched linear discrete-time systems with interval time-varying delay. Nonlinear Anal. Hybrid Syst. 2011, 5: 605-612. 10.1016/j.nahs.2011.05.006
Wang SG, Yao HS: Impulsive synchronization of two coupled complex networks with time-delayed dynamical nodes. Chin. Phys. B 2011, 20: 090513-1-090523-6.
Wang SG, Yao HS: Pinning synchronization of the time-varying delay coupled complex networks with time-varying delayed dynamical nodes. Chin. Phys. B 2012, 21: 050508-1-050508-2.
Wang S, Yao H, Zheng S, Xie Y: A novel criterion for cluster synchronization of complex dynamical networks with coupling time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 2012, 17: 2997-3004. 10.1016/j.cnsns.2011.10.036
Niamsup P, Rajchakit M, Rajchakit G: Guaranteed cost control for switched recurrent neural networks with interval time-varying delay. J. Inequal. Appl. 2013., 2013: Article ID 292 10.1186/1029-242X-2013-292
Wang S, Yao H, Sun M: Cluster synchronization of time-varying delay coupled complex networks with nonidentical dynamical nodes. J. Appl. Math. 2012, 2012: 1-12.
Wang S, Yao H: The effect of control strength on lag synchronization of nonlinear coupled complex networks. Abstr. Appl. Anal. 2012, 2012: 1-11.
Karimi HR: Robust delay-dependent H -infinity control of uncertain Markovian jump systems with mixed neutral discrete and distributed time delays. IEEE Trans. Circuits Syst. I 2011, 58: 1910-1923.
Karimi HR: A sliding mode approach to H -infinity synchronization of master-slave time-delay systems with Markovian jumping parameters and nonlinear uncertainties. J. Franklin Inst. 2012, 349: 1480-1496. 10.1016/j.jfranklin.2011.09.015
Diblík J, Khusainov DY, Grytsay IV, Smarda Z: Stability of nonlinear autonomous quadratic discrete systems in the critical case. Discrete Dyn. Nat. Soc. 2010., 2010: Article ID 539087 10.1155/2010/539087
Rebenda J, Smarda Z: Stability and asymptotic properties of a system of functional differential equations with nonconstant delays. Appl. Math. Comput. 2013, 219: 6622-6632. 10.1016/j.amc.2012.12.061
Diblík J, Ruzickova M, Smarda Z, Suta Z: Asymptotic convergence of the solutions of a dynamic equation on discrete time scales. Abstr. Appl. Anal. 2012., 2012: Article ID 580750 10.1155/2012/580750
Rebenda J, Smarda Z: Stability of a functional differential system with a finite number of delays. Abstr. Appl. Anal. 2013., 2013: Article ID 853134 10.1155/2013/853134
Uhlig F: A recurring theorem about pairs of quadratic forms and extensions. Linear Algebra Appl. 1979, 25: 219-237.
Gahinet P, Nemirovskii A, Laub AJ, Chilali M: LMI Control Toolbox for Use with Matlab. The MathWorks, Natick; 1995.
Boyd S, Ghaoui EL, Feron E, Balakrishnan V: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia; 1994.
Niamsup P, Rajchakit G: New results on robust stability and stabilization of linear discrete-time stochastic systems with convex polytopic uncertainties. J. Appl. Math. 2013., 2013: Article ID 368259 10.1155/2013/368259
Acknowledgements
This work was supported by the Thailand Research Fund Grant, the Commission for Higher Education and Faculty of Science, Maejo University, Thailand. The second author is supported by the Center of Excellence in Mathematics, Thailand, and Commission for Higher Education, Thailand. The authors thank anonymous reviewers for valuable comments and suggestions, which allowed us to improve the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors contributed equally and significantly in writing this paper. The authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Rajchakit, M., Niamsup, P. & Rajchakit, G. LMI approach to decentralized exponential stability of linear large-scale systems with interval non-differentiable time-varying delays. Adv Differ Equ 2013, 332 (2013). https://doi.org/10.1186/1687-1847-2013-332
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-332