
Abstract
In this paper, we obtain exact solutions of two nonlinear evolution equations, namely the modified Kortweg de Vries equation and the higher-order modified Boussinesq equation with damping term. The method employed to obtain the exact solutions is the -expansion method. Traveling wave solutions of three types are obtained and these are the solitary waves, periodic and rational.
Similar content being viewed by others
1 Introduction
In this paper, we consider two nonlinear evolution equations, namely the modified Kortweg de Vries equation [1]
and the higher-order modified Boussinesq equation with damping term [2]
It is well known that nonlinear evolution equations, such as (1) and (2), are widely used as models to describe physical phenomena in different fields of applied sciences such as plasma waves, solid state physics, plasma physics and fluid mechanics. One of the basic physical problems for these models is to obtain their exact solutions for the better understanding of nonlinear models [1–22]. In the last few decades, a variety of effective methods for finding exact solutions, such as the homogeneous balance method [3], the ansatz method [4, 5], the variable separation approach [6], the inverse scattering transform method [7], the Bäcklund transformation [8], the Darboux transformation [9], Hirota’s bilinear method [10], the reduction mKdV equation method [11], the tri-function method [12, 13], the projective Riccati equation method [14], the sine-cosine method [15], the Jacobi elliptic function expansion method [16, 17], the F-expansion method [18] and the exp-function expansion method [19] and many others, were successfully applied to nonlinear differential equations.
Although a great deal of research work has been devoted to finding different methods to solve nonlinear evolution equations, there is no unique method. In 2007 Wang et al. [20] proposed a new method referred to as the -expansion method for finding traveling wave solutions of nonlinear evolution equations. This paper showed that the -expansion method is an effective method for finding exact solutions of nonlinear evolution equations. It has been extensively used by various researchers (see, for example, papers [20–22]) in a variety of scientific fields. The key ideas of the method are that the traveling wave solutions of a complicated nonlinear evolution equation can be constructed by means of various solutions of a second-order linear ordinary differential equation [20].
In this work, our main focus is on equations (1) and (2). We derive the traveling wave solutions of the two equations by using the -expansion method. The paper is organized as follows. In Section 2, we describe the -expansion method. Exact solutions of the modified Kortweg de Vries equation (1) and the higher-order modified Boussinesq equation with damping term (2) are constructed in Section 3 using the -expansion method. In Section 4, conclusion is given.
2 Analysis of the -expansion method
The -expansion method for finding exact solutions of nonlinear differential equations was introduced in [20]. Several researchers have recently applied this method to various nonlinear differential equations. They have shown that this method provides a very effective and powerful mathematical tool for solving nonlinear equations in various fields of applied sciences (see, for example, papers [20–22]).
Consider a nonlinear partial differential equation (NPDE), say, in two independent variables x and t, given by
where is an unknown function, P is a polynomial in u and its various partial derivatives, in which the highest-order derivatives and nonlinear terms are involved. The essence of the -expansion method is given in the following steps.
-
Step 1. The transformation , reduces equation (3) to the ordinary differential equation (ODE)
(4) -
Step 2. According to the -expansion method, it is assumed that the traveling wave solution of equation (4) can be expressed by a polynomial in as follows:
(5)
where satisfies the second-order linear ODE in the form
with , , λ and μ being constants to be determined. The positive integer m is determined by considering the homogenous balance between the highest-order derivatives and nonlinear terms appearing in ODE (4).
-
Step 3. By substituting (5) into (4) and using the second-order ODE (6), collecting all terms with same order of together, the left-hand side of (4) is converted into another polynomial in . Equating each coefficient of this polynomial to zero, yields a set of algebraic equations for , ν, λ, μ.
-
Step 4. Assuming that the constants can be obtained by solving the algebraic equations in Step 3, since the general solution of (6) is known, then substituting the constants and the general solutions of (6) into (5) we obtain traveling wave solutions of the NPDE (3).
3 Exact solutions of (1) and (2)
In this section we construct traveling wave solutions of mKdV and modified Boussinesq equations by employing the -expansion method.
3.1 The modified Kortweg de Vries equation
The modified KdV equation is given by [1]
where u is a real-valued scalar function, t is time and x is a spatial variable.
As the first step, we transform the modified KdV type equation (7) to a nonlinear ordinary differential equation (ODE) using the traveling wave variable
Applying the above transformation, equation (7) transforms to the nonlinear ODE
which reduces to
Hence if , we obtain
where the prime denotes the derivative with respect to z.
The -expansion method assumes the solution of equation (11) to be of the form
where satisfies the second-order linear ODE with constant coefficients, viz.,
where λ and μ are constants.
The balancing procedure yields , so the solution of the ODE (11) is of the form
Substituting (14) into (11), making use of the ODE (13), collecting all terms with same powers of and equating each coefficient to zero yield the following system of algebraic equations:
Solving this system of algebraic equations, with the aid of Mathematica, we obtain
Substituting these values of , and the corresponding solution of ODE (13) into (14), we obtain three types of traveling wave solutions of equation (7). These are as follows.
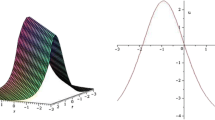
Case 1: When , we obtain the hyperbolic function solutions
where , , and are arbitrary constants.
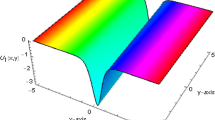
Case 2: When , we obtain the trigonometric function solutions
where , , and are arbitrary constants.
Case 3: When , we obtain the rational function solutions
where , and are arbitrary constants.
3.2 Higher-order modified Boussinesq equation with damping term
We now consider the modified Boussinesq equation with damping term [2] given by
where u is a real-valued scalar function, t is time, x is a spatial variable and α, β, γ are nonzero real constants.
Following the same procedure of the previous subsection equation (25) is transformed to the following ODE:
where the prime denotes the derivative with respect to z. Balancing the order of and in (26) yields . The solution to equation (26) is also assumed to be of the form
Substituting (27) into (26) and making use of (13), we obtain the following algebraic system of equations in terms of , , by equating all coefficients of the functions to zero.
Solving this system of algebraic equations, with the aid of Mathematica, one possible set of solution is
Substituting these values from (34) and the corresponding solution of ODE (13) into (27) yields three types of traveling wave solutions of equation (26) as follows.
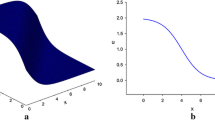
Case 1: When , we obtain the hyperbolic function solution
where , and and are arbitrary constants.
Case 2: When , we obtain the trigonometric function solution
where , and and are arbitrary constants.
Case 3: When , we obtain the rational function solution
where , and and are arbitrary constants.
4 Conclusion
In this paper, we studied two nonlinear partial differential equations that appear in a variety of scientific fields. These are the modified Kortweg de Vries equation and the higher-order modified Boussinesq equation with damping term. We used the -expansion method to obtain exact solutions of these two evolution equations. By using this method, we have successfully obtained traveling wave solutions expressed in the form of a hyperbolic function, a trigonometric function and a rational function. This work also highlighted the power of the -expansion method for the determination of exact solutions of nonlinear evolution equations.
References
Wazwaz A-M: A modified KdV-type equation that admits a variety of travelling wave solutions: kinks, solitons, peakons and cuspons. Phys. Scr. 2012., 86: Article ID 045501
Yan Z-Y, Xie F-D, Zhang H-Q: Symmetry reductions, integrability and solitary wave solutions to higher-order modified Boussinesq equations with damping term. Commun. Theor. Phys. 2001, 36: 1-6.
Wang M, Zhou Y, Li Z: Application of a homogeneous balance method to exact solutions of nonlinear equations in mathematical physics. Phys. Lett. A 1996, 216: 67-75. 10.1016/0375-9601(96)00283-6
Hu JL: Explicit solutions to three nonlinear physical models. Phys. Lett. A 2001, 287: 81-89. 10.1016/S0375-9601(01)00461-3
Hu JL: A new method for finding exact traveling wave solutions to nonlinear partial differential equations. Phys. Lett. A 2001, 286: 175-179. 10.1016/S0375-9601(01)00291-2
Lou SY, Lu JZ: Special solutions from variable separation approach: Davey-Stewartson equation. J. Phys. A, Math. Gen. 1996, 29: 4209-4215. 10.1088/0305-4470/29/14/038
Ablowitz MJ, Clarkson PA: Soliton, Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge; 1991.
Gu CH: Soliton Theory and Its Application. Zhejiang Science and Technology Press, Zhejiang; 1990.
Matveev VB, Salle MA: Darboux Transformation and Soliton. Springer, Berlin; 1991.
Hirota R: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge; 2004.
Yan ZY: A reduction mKdV method with symbolic computation to construct new doubly-periodic solutions for nonlinear wave equations. Int. J. Mod. Phys. C 2003, 14: 661-672. 10.1142/S0129183103004814
Yan ZY: The new tri-function method to multiple exact solutions of nonlinear wave equations. Phys. Scr. 2008., 78: Article ID 035001
Yan ZY: Periodic, solitary and rational wave solutions of the 3D extended quantum Zakharov-Kuznetsov equation in dense quantum plasmas. Phys. Lett. A 2009, 373: 2432-2437. 10.1016/j.physleta.2009.04.018
Lu DC, Hong BJ:New exact solutions for the -dimensional generalized Broer-Kaup system. Appl. Math. Comput. 2008, 199: 572-580. 10.1016/j.amc.2007.10.012
Wazwaz M: The tanh and sine-cosine method for compact and noncompact solutions of nonlinear Klein-Gordon equation. Appl. Math. Comput. 2005, 167: 1179-1195. 10.1016/j.amc.2004.08.006
Lu DC: Jacobi elliptic functions solutions for two variant Boussinesq equations. Chaos Solitons Fractals 2005, 24: 1373-1385. 10.1016/j.chaos.2004.09.085
Yan ZY:Abundant families of Jacobi elliptic functions of the -dimensional integrable Davey-Stewartson-type equation via a new method. Chaos Solitons Fractals 2003, 18: 299-309. 10.1016/S0960-0779(02)00653-7
Wang M, Li X: Extended F -expansion and periodic wave solutions for the generalized Zakharov equations. Phys. Lett. A 2005, 343: 48-54. 10.1016/j.physleta.2005.05.085
He JH, Wu XH: Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 2006, 30: 700-708. 10.1016/j.chaos.2006.03.020
Wang M, Li X, Zhang J:The -expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 2008, 372: 417-423. 10.1016/j.physleta.2007.07.051
Bekir A, Aksoy E:The exact solutions of shallow water wave equation by using the -expansion method. Waves Random Complex Media 2012, 22(3):317-331. 10.1080/17455030.2012.683890
Li L-X, Wang M-L:The -expansion method and travelling wave solutions for a higher-order nonlinear Schrodinger equation. Appl. Math. Comput. 2009, 208: 440-445. 10.1016/j.amc.2008.12.005
Acknowledgements
DMM and CMK would like to thank the organizing Committee of the International Conference on the Theory, Methods and Application of Nonlinear Equations for their kind hospitality during the conference. DMM would also like to thank the Faculty Research Committee of FAST, North-West University for their financial support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
DMM and CMK worked together in the derivation of the mathematical results. Both authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Mothibi, D.M., Khalique, C.M. On the exact solutions of a modified Kortweg de Vries type equation and higher-order modified Boussinesq equation with damping term. Adv Differ Equ 2013, 166 (2013). https://doi.org/10.1186/1687-1847-2013-166
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-166