
Abstract
This paper reveals a computational method based using a tau method with Jacobi polynomials for the solution of fuzzy linear fractional differential equations of order . A suitable representation of the fuzzy solution via Jacobi polynomials diminishes its numerical results to the solution of a system of algebraic equations. The main advantage of this method is its high robustness and accuracy gained by a small number of Jacobi functions. The efficiency and applicability of the proposed method are proved by several test examples.
PACS Codes:02, 02.30.Jr, 02.60.-x, 45.10.Hj.
Similar content being viewed by others


1 Introduction
Recently, the enormous number of applications in the field of fractional calculus and fractional differential equations has been visualized. Fractional differential equations provide an outstanding instrument to describe the complex phenomena in fields of viscoelasticity, electromagnetic waves, diffusion equations and so on [1–5]. Moreover, the fractional order models of real systems are more sufficient in comparison with the integer order cases. Therefore, the field of fractional calculus has motivated the interest of researchers in various fields like physics, chemistry, engineering and even finance [6–10].
Finding a high accurate and efficient numerical method has become a significant research due to except for a few number of these equations, there exists difficulty to find the exact solution of fractional differential equations (FDEs). Consequently, various numerical methods have appeared to approximate reasonably the analytical solutions. These methods are such as the predictor corrector method [11], Adomian decomposition method (ADM) [12–15], variational iteration method (VIM) [16, 17] and homotopy analysis method (HAM) [18, 19].
Orthogonal functions have received noticeable consideration in dealing with various problems. The main advantage behind the approach using this method is that it reduces these problems to those of solving a system of algebraic equations leading to simplify the original problem clearly. Saadatmandi and Dehghan [20] presented a shifted Legendre tau method with an operational matrix for the numerical solution of a multilinear and nonlinear fractional differential equation. Esmaeili et al. [21] introduced a direct method using the collocation method and Müntz polynomials for the solution of FDEs. Consequently, the operational matrix of the other orthogonal polynomials has been derived for solving FDEs with boundary conditions and initial conditions, like Chebyshev polynomials [22, 23], Laguerre series [24], fractional Legendre polynomials [25], generalized hat basis functions [26] and Jacobi polynomials [27, 28].
The study of fuzzy differential equations (e.g., in this contribution, we consider fuzzy fractional differential equation) creates a suitable setting for mathematical modeling of real-world problems in which uncertainties or vagueness penetrate. A comprehensive approach to this kind of equations has been considered by Seikkala [29] and Kaleva [30]. Despite the vast applications of the H-derivative introduced by them, due to an important drawback in this kind of derivative, Bede and Gal [31] introduced strongly generalized differentiability and followed up by the authors in [32, 33]. Actually, strongly generalized differentiability can be applied for a more enormous class of fuzzy differential equations than Hukuhara differentiability.
Recently, some attempts have been made for solving fuzzy fractional differential equations (FFDEs) that Agarwal et al. was a pioneer [34]. They considered the solution of FFEDs under Riemann-Liouville’s differentiability. Also, Salahshour et al. [35] studied the existence, uniqueness and approximate solutions of (FFDEs) under Caputo’s H-differentiability. Afterward, Mazandarani, Vahidian Kamyad [36] applied the fractional Euler method for FFDEs under Caputo-type differentiability and Salahshour et al. [37] extended fuzzy Laplace transforms for solving FFDEs under the Riemann-Liouville H-derivative.
Our main motivation for preparing this paper is to generalize shifted Jacobi function operational matrix for solving fuzzy fractional differential equations of order under Caputo’s H-differentiability. We introduce a suitable way to approximate fuzzy solution of linear fuzzy fractional differential equations by means of shifted Jacobi functions based on the fuzzy residual of the problem in which the Jacobi operational matrix is introduced to be applied in the derivation of the proposed method. Another motivation is that the approximate solution based on the shifted Jacobi polynomials, (), can be obtained in terms of the Jacobi parameters α and β. Therefore, instead of using with particular indexes, the solution can be derived generally to extend for other requests.
The paper organized as follows. In Section 2, we present some relevant properties of fuzzy sets, fuzzy differential equations and Jacobi polynomials with its error bound for approximate function accompanied by some details of JOM based on shifted Jacobi polynomials in crisp concept. Also, Caputo type derivative definition and its properties in the crisp sense is considered in this section. Some basic concepts of fuzzy fractional derivatives are explained in Section 3. Section 4 is devoted to the fuzzy approximation function using shifted Jacobi polynomials. Additionally, the Jacobi operational matrix (JOM) based on shifted Jacobi polynomials is extended for solving FFDEs in this section. Several examples are experienced to depict the effectiveness of the proposed method in Section 5. Finally, some conclusions are drawn in Section 6.
2 Preliminaries
Let us denote by the class of fuzzy subsets u of the real axis ℝ (i.e. satisfying the following properties):
-
(i)
u is upper semicontinuous,
-
(ii)
u is fuzzy convex, i.e., for all , ,
-
(iii)
u is normal, i.e., for which ,
-
(iv)
is the support of the u, and its closure is compact.
Then is called the space of fuzzy real numbers and any is called fuzzy real number (see, e.g., [38]).
The α-level set of a fuzzy number , , denoted by , is defined as
It is clear that the r-level set of a fuzzy number is a closed and bounded interval , where denotes the left-hand endpoint of and denotes the right-hand endpoint of . Since each can be regarded as a fuzzy number defined by
ℝ can be embedded in .
The addition and scaler multiplication of fuzzy number in are defined as follows:
We can define a matrix D on () by a distance which is so-called Hausdorff distance as follows:
Then the following properties are known (see [38, 39]):
-
(i)
, ,
-
(ii)
, , ,
-
(iii)
, ,
-
(iv)
, ,
-
(v)
is a complete metric space.
Definition 1 ([40])
Let f and g be the two fuzzy-number-valued functions on the interval , i.e., . The uniform distance between fuzzy-number-valued functions is defined by
Remark 1 ([39])
Let be fuzzy continuous. Then from property (iv) of Hausdorff distance, we can define
Definition 2 ([30])
Let . If there exists such that , then z is called the H-difference of x and y, and it is denoted by .
In this paper, the sign ‘⊖’ always stands for H-difference and note that . Also, throughout of paper is assumed the Hukuhara difference and generalized Hukuhara differentiability are existed.
Definition 3 ([41])
The generalized difference (g-difference for short) of two fuzzy numbers is given by the expression
Proposition 1 ([41])
For any fuzzy numbers the g-difference exists and it is a fuzzy number.
In this paper, we consider the definition of fuzzy differentiability presented by Bede and Gal in [32].
Definition 4 ([32])
Let and . We say that f is strongly generalized differential at . If there exists an element , such that
-
(i)
for all sufficiently small, , and the limits (in the metric d)
-
(ii)
for all sufficiently small, , and the limits (in the metric d)
-
(iii)
for all sufficiently small, , and the limits (in the metric d)
-
(iv)
for all sufficiently small, , and the limits (in the metric d)
Remark 2 f is so-called (1)-differentiable on , if f is differentiable in the sense (i) of Definition 4 and also f is (2)-differentiable on , if f is differentiable in the sense (ii) of Definition 4.
The following theorem was proved by Chalco-Cano and Román-Flores [42] based on Definition 4.
Theorem 1 (see [42])
Let be a function and denote , for each . Then:
-
(1)
If F is (1)-differentiable, then and are differentiable functions and
-
(2)
If F is (1)-differentiable, then and are differentiable functions and
Theorem 2 (see [43])
Let be a fuzzy-valued function on and it is represented by . For any fixed , assume ( and ) are Riemann-integrable on for every , and assume there are two positive and such that and for every . Then is improper fuzzy Riemann-integrable on and the improper fuzzy Riemann-integral is a fuzzy number. Furthermore, we have
Definition 5 ([39])
. We say that f fuzzy-Riemann integrable to , if for any , there exists such that for any division of with the norms , we have
where ∑∗ means addition with respect to ⊕ in
We also call an f as above -integrable.
Definition 6 ([44])
Consider the linear system of equations:
The matrix form of the above equations is
where the coefficient matrix , is a crisp matrix and , . This system is called a fuzzy linear system (FLS).
Definition 7 ([44])
A fuzzy number vector given by , , is called a solution of the fuzzy linear system (2) if
If for a particular k, , , we simply get
To solve fuzzy linear systems, one can refer to [44, 45].
Now, we review some basic definitions of fractional integral and derivative, especially Caputo type, with their properties presented in crisp context [6, 46].
Remark 3 The fuzzy fractional derivative, in this paper, is assumed in the Caputo sense. The reason for adopting the Caputo definition, as pointed by Momani and Noor [47], is as follows: to solve differential equations (both classical and fractional), we need to specify additional conditions in order to produce a unique solution. Therefore, for the case of the fuzzy Caputo fractional differential equations, these additional conditions are just the traditional conditions, which are akin to those of classical fuzzy differential equations, and are therefore familiar to us. In contrast, for the fuzzy Riemann-Liouville fractional differential equations, these additional conditions constitute certain fuzzy fractional derivatives (and/or integrals) of the unknown solution at the initial point , which are functions of x. These fuzzy initial conditions are not physical like in the crisp concept; furthermore, it is not clear how such quantities are to be measured from experiment, say, so that they can be appropriately assigned in an analysis. See more details in [35, 37, 48].
Definition 8 ([46])
The Riemann-Liouville fractional integral operator of order v, is defined as
Definition 9 ([6])
The Caputo fractional derivatives of order v is defined as
where is the classical differential operator of order m.
For the Caputo derivative, we have:
The ceiling function is used to denote the smallest integer greater than or equal to v, and the floor function to denote the largest integer less than or equal to v. Also and .
Definition 10 ([48])
Similar to the differential equation of integer order, the Caputo’s fractional differentiation is a linear operation, i.e.,
where λ and μ are constants.
Definition 11 ([49])
A classical (crisp) set is normally defined as a collection of elements or objects which can be finite, accountable, or overcountable. Each single element can either belong to or not belong to a set A, while in a fuzzy set (subset) elements of the set have a degree of membership in the set.
Remark 4 Throughout the paper, we use the crisp context frequently, regarding to Definition 11.
2.1 Jacobi polynomials
The Jacobi polynomials, denoted by , are orthogonal with Jacobi weight function: over , namely [50, 51],
where is the Kronecker function and
Also, the Jacobi polynomials can be created by means of the following recurrence formula:
for , where , and . In order to use these polynomials on the interval , we define the so-called shifted Jacobi polynomials by introducing the change of variable . Let the shifted Jacobi polynomials be denoted by . The shifted Jacobi polynomials are orthogonal with respect to the weight function in the interval with the orthogonality property
at which . The analytic form of the shifted Jacobi polynomials of degree i is acquired by
that
Also, the shifted Jacobi polynomial can be stated by the following concise form.
Lemma 1 ([28])
The shifted Jacobi polynomial can be obtained in the form of
in which are
Lemma 2 ([28])
For
in which is the Beta function and stated as
Let and generate the space . A function f belonging to , can be expanded in by
where the coefficients are gained by
Realistically, only the first -terms shifted Jacobi polynomials are considered. Then we have
that
Regarding to as a finite dimensional vector space, f has a unique best approximation from , say , that is,
So, the following lemma provides the upper bound of approximate function using shifted Jacobi polynomials. This error bound proves that the approximate function converges to based on shifted Jacobi polynomials.
Lemma 3 ([28])
Let the function be times continuously differentiable for , , and . If is the best approximation to f from , then the error bound is presented as follows:
that and .
2.2 Operational matrix of Caputo’s derivative of order v
In this section, the Jacobi operational matrix method based on the Caputo-type fractional derivative with using shifted Jacobi polynomials is explained. Afterward, an upper bound for the absolute error between the exact and approximate values of Caputo fractional derivative operator is provided (for more details, see [27, 28]).
Lemma 4 ([27])
Let be shifted Jacobi vector defined in Eq. (4) and also let . Then
where is operational matrix of derivatives of order v in the Caputo sense and is defined by:
where
and is given by
Note that in , the first rows, are all zeros.
Now, the following lemma gives us an upper bound for error estimation of Caputo derivative operator mentioned in Lemma 4. But initially, we define the error vector as:
where
Lemma 5 If the error function of Caputo fractional derivative operator for Jacobi polynomials is times continuously differentiable for , . Also and then the error bound is gained as follows:
Proof Analogously to the demonstration of Lemma 5 in [28], we can prove this lemma. □
Therefore, the maximum norm of error vector is achieved as
3 Fuzzy Caputo-type fractional differentiability
The fuzzy fractional differentiability of order , particularly Caputo type, is considered in this section. Some basic definitions and theorems are given and introduced the necessary notation, which will be used in the rest of paper. See, for example, [34, 35, 37].
At first, some notations are presented which are put to use throughout the remaining sections. It is easy to find these notations in the crisp sense. See [46, 48].
⧫ , is the set of all fuzzy-valued measurable functions f on where .
⧫ is a space of fuzzy-valued functions, which are continuous on .
⧫ indicates the set of all fuzzy-valued functions, which are continuous up to order n.
⧫ denotes the set of all fuzzy-valued functions, which are absolutely continuous.
Definition 12 ([37])
Let , the Riemann-Liouville integral of fuzzy-valued function f is as follows:
To specify the fuzzy Riemann-Liouville integral of fuzzy-valued function f based on the lower and upper functions, the following definition is determined.
Definition 13 ([37])
Let , the parametric form of the Riemann-Liouville integral of fuzzy-valued function f can be expressed by
in which and .
Definition 14 ([35])
Let be a fuzzy set-value function. Then f is said to be Caputo’s fuzzy differentiable at x when
where .
Definition 15 ([35])
Let and and . We say that is fuzzy Caputo fractional differentiable of order at , if there exists an element such that for all , ,
or
or
or
Remark 5 A fuzzy-valued function f is -differentiable, if it is differentiable as in the Definition 15, case (i), and it is -differentiable, if it is differentiable as in the Definition 15, case (ii).
Theorem 3 ([35])
Let us assume that , then we have the following:
when f is -differentiable and
when f is -differentiable.
Lemma 6 ([35])
Let and , then the fuzzy Caputo derivative can be stated using the fuzzy fractional Riemann-Liouville integral operator as follows:
when f is -differentiable, and
when f is -differentiable.
4 Extension of JOM method for FFEDs
In this section, fuzzy approximation function by means of shifted Jacobi polynomials is derived. Moreover, the Jacobi operational matrix based of fuzzy shifted Jacobi polynomials is introduced with details and provided the application of the method for solving fuzzy linear fractional differential equations of order . It should be mentioned that this method is the extension of the researches implemented in the crisp sense by Doha et al. [27] and Kazem [28].
In [52–54], the authors established the concepts of the best approximation of fuzzy function and as an application, Lowen introduced fuzzy approximation of fuzzy function by means of Lagrange interpolation [55]. Firstly, we define the approximate fuzzy function using shifted Jacobi polynomials.
Definition 16 For and shifted Jacobi polynomial a real valued function over , the fuzzy function is approximated by
where the fuzzy coefficients are gained by
in which , is as the same as the shifted Jacobi polynomials described in Section 2.1, and ∑∗ means addition with respect to ⊕ in .
Remark 6 In practice, only the first -terms shifted Jacobi polynomials are taken into consideration. So, we have
that the fuzzy shifted Jacobi coefficient vector and shifted Jacobi function vector are explained by:
Since , for all , then we can point out the fuzzy approximation function , according to the lower and upper functions as follows.
Definition 17 Let , the approximation of fuzzy-valued function in the parametric form is
Theorem 4 The best approximation of a fuzzy function based on the Jacobi points exists and is unique.
Proof The proof is an immediate result of Theorem 4.2.1 in [54]. □
Now, in the following theorem, we will achieve the error bound for the fuzzy approximate function based on shifted Jacobi polynomials. Actually, this error bound depicts that the approximation converges to the fuzzy function .
Theorem 5 Consider the function is times continuously fuzzy differentiable for , , and . If is the best fuzzy approximation to from , then the error bound is presented as follows:
that and .
Proof It follows from Definition 1 of that
in which and . This completes the proof of theorem. □
4.1 Jacobi operational matrix
This part is devoted to the operational matrix of shifted Jacobi polynomials regarding to fuzzy Caputo’s derivative. The operational matrix play an important role in solving fractional differential equations by means of orthogonal functions [22, 23, 25, 27, 28]. Our aim in this section is to generalize this method for solving fuzzy linear fractional differential equations.
Lemma 7 The fuzzy Caputo fractional derivative of order over the shifted Jacobi functions can be acquired in the form of
where for and for , we have .
Proof It is straightforward from Section 2.1 and the Caputo derivative of . □
The fuzzy Caputo operational matrix based on the shifted Jacobi polynomials is expressed as well as relation (5). So, we have
where is the -square operational matrix of fuzzy fractional Caputo’s derivative of shifted Jacobi polynomials and . So, using (10) and (14), we can approximate the fuzzy fractional Caputo’s derivative as
The subsequent property of the product of two fuzzy Jacobi function vectors will also be utilized
that ∼Θ is a product operational matrix for the vector Θ, which its elements can be calculated from:
where is acquired by
The error bound of fuzzy Caputo fractional differential operator is taken into consideration in the next theorem for . Therefore, we clarify the as
where
Theorem 6 Assume that the error function of fuzzy Caputo fractional derivative operator for shifted Jacobi polynomials be times continuously fuzzy differentiable for , . Additionally, and then the error bound is given by
Proof Again using Definition 1 of and Lemma 5, we have
□
4.2 Application of the JOM of the fractional Caputo derivative
In this section, the Jacobi operational matrix derived from the previous sections is applied for solving linear FFDEs of order based on the shifted Jacobi polynomials. The fuzzy residual of the general single-term FFDEs is obtained and then using the orthogonal property of the Jacobi polynomials, a fuzzy algebraic system is extracted, which is solved easily to find the unknown fuzzy coefficient of the approximate solution of the problem.
Let us consider the general linear fuzzy fractional differential equation
in which is a continuous fuzzy-valued function, denotes the fuzzy Caputo fractional derivative of order v and .
In the following theorem, we clarify the way to find the fuzzy unknown coefficient of the fuzzy approximate function , using the fuzzy residual function of the problem easily.
Theorem 7 Let and , then
Proof Let . At first, from Eqs. (14) and (15) we can replace solution with ,
Then the fuzzy residual function of the problem is expressed by
hence,
□
Regarding to Definition 3 of g-difference, we have
or in the form of fuzzy operator, we can state
Let denotes the fuzzy inner product over . It is required like a typical tau method in the crisp concept (see [56, 57]) that satisfy
where .
From Eq. (21), we gain -fuzzy linear algebraic equations which are as follows in the expanded form:
for . Also the fuzzy coefficients are defined as
where is acquired as
Subsequently, replacing Eq. (10) in the initial condition of the problem (19)
from the above equation with Eq. (22), -fuzzy linear algebraic equations are generated. It is obvious that the unknown fuzzy coefficients are obtained with solving this fuzzy system using the method presented for example in [44].
5 Test problems
In this part, different examples are considered to depict the feasibility of the proposed method for solving FFDEs with a suitable accuracy.
Example 1
Consider the following FFDE:
Here, suppose that , then using -differentiability and Theorem 1 we have the following parametric form:
and
where . The analytical solution of the problem (26) can be acquired using Eqs. (27) and (28) as
By applying the technique explained in Section 4, the equation is gained in the matrix form as
where the values of vector is obtained as Eq. (23). Deriving the fuzzy residual function and multiplying it by , to generate -fuzzy algebraic equations
Also for , one has
Finally, Eqs. (31) and (32) create -fuzzy linear equations to give us the unknown fuzzy coefficients after solving this system.
With , and , we have
and with the assumption that ,
So, considering these two matrices and substituting them into Eqs. (30) and (32), we can obtain the fuzzy coefficients as
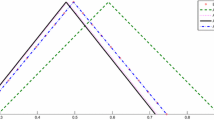
From Table 1, we can obtain a good approximation with the exact solution by making use of the proposed method. In this table, the results are gained at . Also, the method is tested with different values of α, β which are depicted in Figure 1. The results is more accurate with , . We may also see from Figure 2, the absolute error is smaller and smaller when m grows. Finally, the approximate fuzzy solution is illustrated in Figure 3 for different values of v that shows this approach can solve FFDEs of different fractional order effectively.

The absolute error for different values of Example 1, , .

The absolute error for different values m of Example 1, , .

The fuzzy approximate solution of Example 1, for different fractional orders v , , .
Example 2 Consider the inhomogeneous linear fractional relaxation equation in [58] in the sense of fuzzy context, so we have
in which is a continuous fuzzy function and indicates the fuzzy Caputo fractional derivative of order v.
Now, utilizing the definition of -differentiability and Theorem 1, we have
and
Solving Eqs. (34)-(35) causes to specify the solution of FFDE (33) as follows:
Now, if we apply the technique explained in Section 4 in Eqs. (34) and (35) with and , then the 3 unknown fuzzy coefficients with the choices of and are as
so if we consider then the approximate fuzzy function is obtained as
The absolute error for some various α, β at are shown in Table 2 and Figure 4. From Table 2, it can be seen that with the few number of Jacobi polynomials, the approximate solution with high accuracy is achievable. Furthermore, Figure 5 shows that the error with increasing the number of Jacobi terms changes slowly. The approximate fuzzy solution has been derived for in Figure 6, which shows the feasibility of the proposed method for this kind of problems.

The absolute error for different values of Example 2, , .

The absolute error for different values m of Example 2, , , .

The fuzzy approximate solution of Example 2, for different fractional orders v , , , .
Remark 7 Figure 2 depicts that the approximate solution has a little bit oscillation when the number of Jacobi functions assumed . Actually, it is related to the oscillatory behavior of fuzzy exact solution. Although the approximate solution using the proposed method has a smooth behavior, it can not respond appropriately to match the exact solution, especially when the r-cuts tend to 1. This has lead to the growing of the absolute error which is not significant. This defect is removed with the increasing of the number of Jacobi functions which is obvious according to Figures 1 and 2.
On the other hand, taking into account Figures 4 and 5. The approximate of lower fuzzy function using JOM method for at is as follow with :
as it can be seen, the approximate solution for lower bound has the negotiable coefficients for x, , terms and constant value. Therefore, in this condition, the approximate solution, with initial value , approaches the analytical fuzzy solution rapidly with the increasing the number of Jacobi functions.
Example 3 Let us consider the fractional oscillation equation [59] with fuzzy initial conditions as
where is a continuous fuzzy set-value function and points out the fuzzy fractional derivative order of Caputo type.
Again, regarding to the case (i) of Definition 15 and Theorem 1, one can determine the parametric form of (36) as
and
with the exact solution as
With exploiting of the presented method in Section 5, we can obtain following fuzzy equations system:
then multiplying this system by for using the fuzzy inner product and orthogonal property explained in Section 5, give us -fuzzy linear algebraic equations:
in which .
Afterward, substituting Eq. (10) in the initial condition of Eq. (36) yields
Ultimately, from Eqs. (39) and (40), -fuzzy linear equations are produced which lead to discover the unknown fuzzy coefficients of the fuzzy approximate solution of problem (36), instantaneously.
Taking , , , and applying the method, we can get
if we take into account problem (36) with , then the shifted Jacobi polynomials are as follows:
eventually, putting and in Eqs. (39) and (40), one can get the fuzzy unknown coefficients as
A comparison between the absolute errors of Example 3 for different values of α, β is explained at in Table 3. From Table 3, it is obvious that the proposed method is achieved better accuracy with , which actually with this assumption the method is in agreement with the Legendre tau method proposed in [20]. These results are confirmed again from Figure 7. Although the problem is a fuzzy fractional oscillation equation, this method is successful to attain suitable approximation that its preciseness is risen progressively with the increasing of the number of Jacobi functions in Figure 8. Additionally, the approximate fuzzy solution is described in Figure 9 for different fractional order v. Ultimately, the CPU time is estimated in Table 4 using MATLAB verion 7.6 (R2008a). From Table 4, one can conclude that the time consumption and number of Jacobi polynomials are increased simultaneously.

The absolute error for different values of Example 3, , .

The absolute error for different values m of Example 3, , , .

The fuzzy approximate solution of Example 3, for different fractional orders v , , , .
6 Conclusion
This article adopted the operational Jacobi operational matrix based on the fuzzy Caputo fractional derivative using shifted Jacobi polynomials. The clear advantage of the usage of this method is that the matrix operators have the main role to find the approximate fuzzy solution of FFDEs instead of considering the methods required the complicated fractional derivatives and their calculations, which consume more time and cost in comparison with this method.
Theorems 5 and 6 were proved to demonstrate the error bound of the fuzzy approximate solution and fuzzy fractional Caputo derivative of order . Also, various kinds of problems are solved to illustrate the effectiveness and strength of the method, which can be reached to the suitable accuracy with a lower number of Jacobi functions. In addition, the problems were tested for different values of α and β to show that the method is adaptable in dealing with the various issues.
For future researches, we will try to extend this method for solving multilinear and nonlinear problems as well as solving FFDEs of the order . Furthermore, the generalization of the other orthogonal polynomials for solving FFDEs is the another scope of our attempts. Finally, we will attempt to expand the proposed method under other kinds of fuzzy derivatives like Riemann-Liouville differentiability.
References
Caputo M: Linear models of dissipation whose Q is almost frequency. Part II. Geophys. J. R. Astron. Soc. 1967, 13: 529–539. 10.1111/j.1365-246X.1967.tb02303.x
de Pablo A, Quirós F, Rodríguez A, Vázquez JL: A fractional porous medium equation. Adv. Math. 2011, 226: 1378–1409. 10.1016/j.aim.2010.07.017
Hilfer R: Applications of Fractional Calculus in Physics. Word Scientific, Singapore; 2000.
Oldham KB, Spanier J: The Fractional Calculus. Academic Press, New York; 1974.
Vázquez L, Mendes RV: Fractionally coupled solutions of the diffusion equation. Appl. Math. Comput. 2003, 141: 125–130. 10.1016/S0096-3003(02)00326-0
Diethelm K Lecture Notes in Mathematics. In The Analysis of Fractional Differential Equations. Springer, Berlin; 2010.
Machado JT, Kiryakova V, Mainardi F: Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2011, 3: 1140–1153.
Rivero M, Trujillo JJ, Vázquez L, Velasco MP: Fractional dynamics of populations. Appl. Math. Comput. 2011, 218: 1089–1095. 10.1016/j.amc.2011.03.017
Rossikhin YA, Shitikova MV: Application of fractional calculus for dynamic problems of solid mechanics: novel trends and recent result. Appl. Mech. Rev. 2010., 63: Article ID 010801
Mehdinejadiani B, Naseri AA, Jafari H, Ghanbarzadehd A, Baleanu D: A mathematical model for simulation of a water table profile between two parallel subsurface drains using fractional derivatives. Comput. Math. Appl. 2013. doi:10.1016/j.camwa.2013.01.002
Diethelm K, Ford NJ, Freed AD: A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29: 3–22. 10.1023/A:1016592219341
Daftardar-Gejji V, Jafari H: Adomian decomposition: a tool for solving a system of fractional differential equations. J. Math. Anal. Appl. 2005, 301: 508–518. 10.1016/j.jmaa.2004.07.039
Jafari H, Daftardar-Gejji V: Solving a system of nonlinear fractional differential equations using Adomian decomposition. J. Comput. Appl. Math. 2006, 196: 644–651. 10.1016/j.cam.2005.10.017
Odibat Z, Momani S: Numerical methods for nonlinear partial differential equations of fractional order. Appl. Math. Model. 2008, 32: 28–39. 10.1016/j.apm.2006.10.025
Daftardar-Gejji V, Jafari H: Solving a multi-order fractional differential equation using Adomian decomposition. Appl. Math. Comput. 2007, 189: 541–548. 10.1016/j.amc.2006.11.129
Das S: Analytical solution of a fractional diffusion equation by variational iteration method. Comput. Math. Appl. 2009, 57: 483–487. 10.1016/j.camwa.2008.09.045
Sweilam NH, Khadar MM, Al-Bar RF: Numerical studies for a multi-order fractional differential equation. Phys. Lett. A 2007, 371: 26–33. 10.1016/j.physleta.2007.06.016
Jafari H, Momani S: Solving fractional diffusion and wave equations by modified homotopy perturbation method. Phys. Lett. A 2007, 370: 388–396. 10.1016/j.physleta.2007.05.118
Pandey RK, Singh OP, Baranwal VK: An analytic algorithm for the space-time fractional advection-dispersion equation. Comput. Phys. Commun. 2011, 182: 1134–1144. 10.1016/j.cpc.2011.01.015
Saadatmandi A, Dehghan M: A new operational matrix for solving fractional-order differential equations. Comput. Math. Appl. 2010, 59: 1326–1336. 10.1016/j.camwa.2009.07.006
Esmaeili S, Shamsi M, Luchko Y: Numerical solution of fractional differential equations with a collocation method based on Müntz polynomials. Comput. Math. Appl. 2011, 62: 918–929. 10.1016/j.camwa.2011.04.023
Bhrawy AH, Alofi AS: The operational matrix of fractional integration for shifted Chebyshev polynomials. Appl. Math. Lett. 2013, 26: 25–31. 10.1016/j.aml.2012.01.027
Doha EH, Bhrawy AH, Ezz-Eldien SS: A Chebyshev spectral method based on operational matrix for initial and boundary value problems of fractional order. Comput. Math. Appl. 2011, 62: 2364–2373. 10.1016/j.camwa.2011.07.024
Hwang C, Shih YP: Parameter identification via Laguerre polynomials. Int. J. Syst. Sci. 1982, 13: 209–217. 10.1080/00207728208926341
Kazem S, Abbasbandy S, Kumar S: Fractional-order Legendre functions for solving fractional-order differential equations. Appl. Math. Model. 2013, 37: 5498–5510. 10.1016/j.apm.2012.10.026
Tripathi MP, Baranwal VK, Pandey RK, Singh OP: A new numerical algorithm to solve fractional differential equations based on operational matrix of generalized hat functions. Commun. Nonlinear Sci. Numer. Simul. 2013, 18: 1327–1340. 10.1016/j.cnsns.2012.10.014
Doha EH, Bhrawy AH, Ezz-Eldien SS: A new Jacobi operational matrix: an application for solving fractional differential equations. Appl. Math. Model. 2012, 36: 4931–4943. 10.1016/j.apm.2011.12.031
Kazem S: An integral operational matrix based on Jacobi polynomials for solving fractional-order differential equations. Appl. Math. Model. 2013, 37: 1126–1136. 10.1016/j.apm.2012.03.033
Seikkala S: On the fuzzy initial value problem. Fuzzy Sets Syst. 1987, 24: 319–330. 10.1016/0165-0114(87)90030-3
Kaleva O: Fuzzy differential equations. Fuzzy Sets Syst. 1987, 24: 301–317. 10.1016/0165-0114(87)90029-7
Bede B, Gal SG: Almost periodic fuzzy-number-valued functions. Fuzzy Sets Syst. 2004, 147: 385–403. 10.1016/j.fss.2003.08.004
Bede B, Gal SG: Generalizations of the differentiability of fuzzy number value functions with applications to fuzzy differential equations. Fuzzy Sets Syst. 2005, 151: 581–599. 10.1016/j.fss.2004.08.001
Bede B, Rudas IJ, Bencsik AL: First order linear fuzzy differential equations under generalized differentiability. Inf. Sci. 2007, 177: 1648–1662. 10.1016/j.ins.2006.08.021
Agarwal RP, Lakshmikantham V, Nieto JJ: On the concept of solution for fractional differential equations with uncertainty. Nonlinear Anal. 2010, 72: 2859–2862. 10.1016/j.na.2009.11.029
Salahshour S, Allahviranloo T, Abbasbandy S, Baleanu D: Existence and uniqueness results for fractional differential equations with uncertainty. Adv. Differ. Equ. 2012., 2012: Article ID 112
Mazandarani M, Vahidian Kamyad A: Modified fractional Euler method for solving fuzzy fractional initial value problem. Commun. Nonlinear Sci. Numer. Simul. 2013, 18: 12–21. 10.1016/j.cnsns.2012.06.008
Salahshour S, Allahviranloo T, Abbasbandy S: Solving fuzzy fractional differential equations by fuzzy Laplace transforms. Commun. Nonlinear Sci. Numer. Simul. 2012, 17: 1372–1381. 10.1016/j.cnsns.2011.07.005
Dubois D, Prade H: Fuzzy numbers: an overview. 1. In Analysis of Fuzzy Information. CRC Press, Boca Raton; 1987:3–39.
Anastassiou GA, Gal SG: On a fuzzy trigonometric approximation theorem of Weierstrass-type. J. Fuzzy Math. 2001, 9: 701–708.
Anastassiou GA: Fuzzy Mathematics: Approximation Theory. Springer, Heidelberg; 2010.
Bede B, Stefanini L: Generalized differentiability of fuzzy-valued functions. Fuzzy Sets Syst. 2012. doi:10.1016/j.fss.2012.10.003
Chalco-Cano Y, Román-Flores H: On new solutions of fuzzy differential equations. Chaos Solitons Fractals 2008, 38: 112–119. 10.1016/j.chaos.2006.10.043
Wu HC: The improper fuzzy Riemann integral and its numerical integration. Inf. Sci. 1999, 111: 109–137.
Allahviranloo T, Afshar Kermani M: Solution of a fuzzy system of linear equation. Appl. Math. Comput. 2006, 175: 519–531. 10.1016/j.amc.2005.07.048
Friedman M, Ming M, Kandel A: Fuzzy linear systems. Fuzzy Sets Syst. 1998, 96: 201–209. 10.1016/S0165-0114(96)00270-9
Kilbas AA, Srivastava HM, Trujillo JJ: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam; 2006.
Momani S, Noor MA: Numerical methods for fourth-order fractional integro-differential equations. Appl. Math. Comput. 2006, 182: 754–760. 10.1016/j.amc.2006.04.041
Podlubny I: Fractional Differential Equations. Academic Press, San Diego; 1999.
Zimmermann HJ: Fuzzy Set Theory and Its Applications. Kluwer Academic, Dordrecht; 1991.
Szegö G Am. Math. Soc. Colloq. Pub. 23. Orthogonal Polynomials 1985.
Shen J, Tang T: High Order Numerical Methods and Algorithms. Chinese Science Press, Beijing; 2005.
Abbasbandy S, Amirfakhrian M: Numerical approximation of fuzzy functions by fuzzy polynomials. Appl. Math. Comput. 2006, 174: 1001–1006. 10.1016/j.amc.2005.05.028
Abbasbandy S, Asady B: The nearest trapezoidal fuzzy number to a fuzzy quantity. Appl. Math. Comput. 2004, 156: 381–386. 10.1016/j.amc.2003.07.025
Abbasbandy S, Amirfakhrian M: Best approximation of fuzzy functions. Nonlinear Stud. 2007, 14: 88–103.
Lowen R: A fuzzy Lagrange interpolation theorem. Fuzzy Sets Syst. 1990, 34: 33–38. 10.1016/0165-0114(90)90124-O
Canuto C, Hussaini MY, Quarteroni A, Zang TA: Spectral Methods in Fluid Dynamics. Springer, New York; 1989.
Freilich JH, Ortiz EL: Numerical solution of systems of ordinary differential equations with the Tau method: an error analysis. Math. Comput. 1982, 39: 467–479. 10.1090/S0025-5718-1982-0669640-6
Diethelm K, Ford NJ: Multi-order fractional differential equations and their numerical solution. Appl. Math. Comput. 2004, 154: 621–640. 10.1016/S0096-3003(03)00739-2
Fakhr Kazemi B, Ghoreishi F: Error estimate in fractional differential equations using multiquadratic radial basis functions. Comput. Appl. Math. 2013, 245: 133–147.
Acknowledgements
The authors thank the referees for careful reading and helpful suggestions on the improvement of the manuscript. Also, the research of the first and second authors was partially supported by the Ministry of Higher Education (MOHE), Malaysia, Project FRGS 02-01-12-1142FR.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
AA wrote the first draft, MS and SS corrected and improved it and DB prepared the final version.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Ahmadian, A., Suleiman, M., Salahshour, S. et al. A Jacobi operational matrix for solving a fuzzy linear fractional differential equation. Adv Differ Equ 2013, 104 (2013). https://doi.org/10.1186/1687-1847-2013-104
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-104