
Abstract
In this paper the variational iteration method is used to solve the fractional differential equations with a fuzzy initial condition. We consider a differential equation of fractional order with uncertainty and present the concept of solution. We compared the results with their exact solutions in order to demonstrate the validity and applicability of the method.
Similar content being viewed by others

1 Introduction
With the rapid development of linear and nonlinear science, many different methods such as the variational iteration method (VIM) [1] were proposed to solve fuzzy differential equations.
Fuzzy initial value problems for fractional differential equations have been considered by some authors recently [2, 3]. To study some dynamical processes, it is necessary to take into account imprecision, randomness or uncertainty. The uncertainty can be modeled by incorporating it into the dynamical system and considering fuzzy differential equations. Some recent contributions on the theory of differential equations with uncertainty can be seen in [4].
Let , and E be the set of fuzzy real numbers [4, 5].
We consider a differential equation with uncertainty of the type
where is continuous. We will consider this equation with some adequate initial condition for a given :
-
If and , then (1) reduces to a fractional differential equation.
-
If , then (1) is just a first-order fuzzy differential equation.
Here we combine both types of differential equations, of fractional order and with uncertainty, to consider a new type of dynamical system: fuzzy differential equations of fractional order [3]. The objective of the present paper is to extend the application of the variational iteration method, to provide approximate solutions for fuzzy initial value problems of differential equations of fractional order, and to make comparison with that obtained by an exact fuzzy solution.
2 Preliminaries
In this section the most basic notations used in fuzzy calculus are introduced. We start with defining a fuzzy number.
Definition 1 A fuzzy number (or an interval) u in parametric form is a pair of functions , , , which satisfy the following requirements [2]:
-
1.
is a bounded non-decreasing left continuous function in and right continuous at 0.
-
2.
is a bounded non-decreasing left continuous function in and right continuous at 0.
-
3.
, .
Definition 2 The Riemann-Liouville fractional derivative of order of a continuous function is given by
provided the right-hand side is pointwisely defined on .
3 Fuzzy fractional differential equations with uncertainty
Consider the following fuzzy fractional differential equation:
where and is a continuous function on .
A fuzzy function is a solution of fuzzy fractional differential equation (2) if is continuous on ; and assume that there exits such that the nonlinearity f is of the form
where
is the usual Riemann-Liouville fractional derivative of order q of the function and is continuous.
Also, we can associate the following initial condition to fuzzy fractional differential equation (2):
Lemma
-
(i)
If there exists , then there also exists .
-
(ii)
If there exists , then .
Proof (i) If there exists , then for each , we can choose such that
for . Since , we have
which proves (i). Assertion (ii) is obvious [6]. □
Hence, we define a solution of this Eq. (3) as a function such that
where is the classical Mittag-Leffler function
Example 1
Consider the fractional differential equation
The general solution of this equation [7] is
Imposing the initial condition
we then have
In the fuzzy case, the solution is also
Now, let and and consider the equation
The solution is given by the following expression:
4 Analysis of the variational iteration method
We consider the fractional differential equation
with the fuzzy initial condition
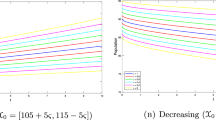
where , , and is a fuzzy triangular number,
According to the variational iteration method [1], we construct a correction functional for (4) which reads

where and are general Lagrange multipliers, which can be identified optimally via the variational, and and are restricted variations that are and .
Therefore, we first determine the Lagrange multipliers and that will be identified via integration by parts. Respectively, the successive approximations and of the solutions and will be readily obtained upon using the Lagrange multiplier obtained by using any selective functions and . Consequently, the solutions are obtained by taking the limits:
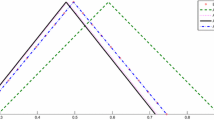
Example 2
Consider the crisp differential equation
with the fuzzy initial condition
where , , and is a fuzzy triangular number, for .
If we put , then . We obtain the system
or
where
Using the same method as that in [8], we obtain the solution of (8). It is given by
where
Then we obtain
It easy to see that define the α-level intervals of a fuzzy number. So, are the α-level intervals of the fuzzy solution of (6)-(7), [2].
To apply the VIM, first we rewrite Eq. (6) in the form
where the notations , and , symbolize the linear and nonlinear terms, [1], respectively. The correction functionals for Eqs. (9) read
Taking the variation with respect to the independent variables and , and noticing that , ,
for , we obtain for Eq. (9) the following stationary conditions:
The general Lagrange multipliers, therefore, can be identified
As a result, we obtain the following iteration formula:
As a result, we obtain the following iterative formula:

and so on. The n th approximate solution of the variational iteration method converges to the exact series solution [9]. So, we approximate the solutions , .
5 Conclusion
The results of the study reveal that the proposed method with fractional Riemann-Liouville derivatives is efficient, accurate, and convenient for solving the fuzzy fractional differential equations.
References
Jafari H, Saeidy M, Baleanu D: The variational iteration method for solving n -th order fuzzy differential equations. Cent. Eur. J. Phys. 2012, 10(1):76–85. 10.2478/s11534-011-0083-7
Arshad S, Lupulescu V: Fractional differential equation with the fuzzy initial condition. Electron. J. Differ. Equ. 2011, 34: 1–8.
Agarwal RP, Lakshmikanthama V, Nieto JJ: On the concept of solution for fractional differential equations with uncertainty. Nonlinear Anal. 2010, 72: 2859–2862. 10.1016/j.na.2009.11.029
Lakshmikantham V, Mohapatra RN: Theory of Fuzzy Differential Equations and Inclusions. Taylor & Francis, London; 2003.
Diamond P, Kloeden PE: Metric Spaces of Fuzzy Sets. World Scientific, Singapore; 1994.
Arshad S, Lupulescu V: On the fractional differential equations with uncertainty. Nonlinear Anal. 2011, 74: 3685–3693. 10.1016/j.na.2011.02.048
Kilbas AA, Srivastava HM, Trujillo JJ: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam; 2006.
Junsheng D, Jianye A, Xu M: Solution of system of fractional differential equations by Adomian decomposition method. Appl. Math. J. Chin. Univ. Ser. B 2007, 22: 7–12. 10.1007/s11766-007-0002-2
Jafari H, Tajadodi H: He’s variational iteration method for solving fractional Riccati differential equation. Int. J. Differ. Equ. 2010., 2010: Article ID 764738
Acknowledgements
The authors thank the referees for valuable comments and suggestions which improved the presentation of this manuscript. This study was supported by The Scientific Research Projects of Atatürk University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors carried out the proof and conceived of the study. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Khodadadi, E., Çelik, E. The variational iteration method for fuzzy fractional differential equations with uncertainty. Fixed Point Theory Appl 2013, 13 (2013). https://doi.org/10.1186/1687-1812-2013-13
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1812-2013-13