
Abstract
We propose two novel cooperative detection schemes based on the AF (Amplify and Forward) and DF (Decode and Forward) protocols to achieve spatial diversity gains for cognitive radio networks, which are referred to as the AF-CDS, (AF-based Cooperative Detection Scheme) and DF-CDS (DF-based Cooperative Detection Scheme), respectively. Closed-form expressions of detection probabilities for the noncooperation scheme, AND-CDS (AND-based Cooperative Detection Scheme), AF-CDS and DF-CDS, are derived over Rayleigh fading channels. Also, we analyze the overall agility for the proposed cooperative detection schemes and show that our schemes can further reduce the detection time. In addition, we compare the DF-CDS with the AF-CDS in terms of detection probability and agility gain, depicting the advantage of DF-CDS at low SNR region and high false alarm probability region.
Similar content being viewed by others


1. Introduction
Cognitive radio (CR), built on software-defined radio, has been proposed in [1] as a means to promote the efficient use of the precious radio spectrum resources. It is defined as an intelligent wireless communication system [2] that is aware of the surrounding environment and utilizes the methodology of understanding-by-building to learn from the environment. Spectrum detection technique (also referred to as spectrum sensing) enables CR networks to adapt to the environment by detecting spectrum holes, and the most efficient way to detect the spectrum holes is to detect the presence of primary users [3]. In reality, however, it is difficult for a cognitive radio to have a direct measurement of the channel between a primary receiver and a transmitter. Therefore, the most recent work focuses on the primary transmitter detection based on local observations of secondary users (see [4–7]). Generally speaking, the spectrum sensing schemes proposed in recent years can be classified as noncooperative detection and cooperative detection.
At present, three noncooperative transmitter detection methods, namely, the matched filter detection, the energy detection and the cyclostationary feature detection, have been presented for CR networks. In [4], Sahai et al. have investigated the matched filter detector that can achieve high processing gain by employing coherent reception. In [5], energy detector has been put forward as an optimal method for the occasion where the secondary users cannot gather sufficient information about the primary user signal such as the modulation type, the pulse shape and so on, but it cannot differentiate signal types, thus inclining to false detection triggered by some unintended signals. The cyclostationary feature detection, as an alternative method, has been further presented in [6, 7], which can differentiate the modulated signal from the additive noise. However, this scheme is computationally complex and requires long observation time.
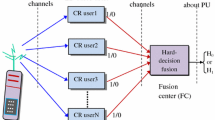
As to the cooperative detection, a collaborative spectrum sensing method has been proposed by Ghasemi and Sousa in [8], where the hard decision about the presence of the primary user from each secondary user is pooled together to determine the presence of primary user by utilizing a majority logic rule without the consideration of cooperative technology that has been proven as an effective means to combat Rayleigh fading [9–12]. More recently, Ganesan and Li [13, 14] have applied the AF protocol to the detection of primary users, and shown that by allowing the secondary users to cooperate with each other the detection time can be reduced. However, this cooperative scheme needs a centralized controller to manage all secondary users, which is some unreasonable for a practical wireless communication system. Besides, how to detect the presence of primary users through cooperation in DF-based CR networks, where the cooperative user has the ability to decode its received signal, is an open challenge.
In this paper, we address the above mentioned issues and present  a more practical AF-based cooperative detection scheme without the assumption of centralized controller and
a more practical AF-based cooperative detection scheme without the assumption of centralized controller and  a totally new DF-based cooperative detection scheme for the occasion where the cooperative relay has decoding ability. Our main contributions can be described as follows. Firstly, we propose two new cooperative detection schemes, namely, AF-CDS and DF-CDS, to detect the presence of primary users more quickly and accurately. Secondly, we develop the closed-form expressions of detection probability and detection time for both AF-CDS and DF-CDS over Rayleigh fading channels. Thirdly, the performance analysis for the noncooperation scheme and the AND-CDS (AND-based cooperative detection scheme) is also presented for the purpose of comparison with our schemes.
a totally new DF-based cooperative detection scheme for the occasion where the cooperative relay has decoding ability. Our main contributions can be described as follows. Firstly, we propose two new cooperative detection schemes, namely, AF-CDS and DF-CDS, to detect the presence of primary users more quickly and accurately. Secondly, we develop the closed-form expressions of detection probability and detection time for both AF-CDS and DF-CDS over Rayleigh fading channels. Thirdly, the performance analysis for the noncooperation scheme and the AND-CDS (AND-based cooperative detection scheme) is also presented for the purpose of comparison with our schemes.
The remainder of this paper is organized as follows. Section 2 describes the system model used throughout this paper and proposes two new cooperative detection schemes (i.e., AF-CDS and DF-CDS) to improve the detection performance of cognitive radio network. In Section 3, we derive the closed-form expressions of detection probabilities and agility gains for the AF-CDS and DF-CDS as well as the traditional noncooperation scheme and AND-CDS, followed by numerical results analysis in Section 4, where we show the superiority of the proposed AF-CDS and DF-CDS schemes in terms of detection performances. Finally, we make some concluding remarks in Section 5.
2. Proposed Cooperative Detection Schemes
In this section, we first describe the system model used in the paper, and then propose AF-CDS and DF-CDS to improve the detection performance of CR networks.
2.1. System Model
Consider a cognitive radio network with a primary user and two secondary users as shown in Figure 1, where the wireless link between the primary user and the secondary user  occurs shadowing fading, and
occurs shadowing fading, and  acts as a cooperative relay for
acts as a cooperative relay for  All users in the CR network are equipped with a single antenna, and the antenna at any user can be utilized for both transmission and reception. There is independent, additive complex white Gaussian noise with zero-mean and double-sided power spectral density
All users in the CR network are equipped with a single antenna, and the antenna at any user can be utilized for both transmission and reception. There is independent, additive complex white Gaussian noise with zero-mean and double-sided power spectral density  at each receiver.
at each receiver.

Cooperative spectrum sensing model in cognitive radio networks.
Without loss of generality, let  be the primary user indicator, namely,
be the primary user indicator, namely,  implies the presence of primary user and
implies the presence of primary user and  implies its absence. Therefore, the signals received by secondary users
implies its absence. Therefore, the signals received by secondary users  and
and  can be expressed as
can be expressed as


where the subscripts  and
and  denote the transmission from the primary user to
denote the transmission from the primary user to  and that from the primary user to
and that from the primary user to  respectively. Besides,
respectively. Besides,  ,
,  and
and  are the fading coefficients of the wireless channel from the primary user to
are the fading coefficients of the wireless channel from the primary user to  , from the primary user to
, from the primary user to  , and from
, and from  to
to  , respectively. Note that the variances of the three random variables (RVs)
, respectively. Note that the variances of the three random variables (RVs)  ,
,  and
and  are
are 
 and
and  respectively. Throughout the paper, we make following assumptions:
respectively. Throughout the paper, we make following assumptions:  All wireless channels are independent from each other in space;
All wireless channels are independent from each other in space;  The relaying protocols (i.e., the AF and the DF) employ full duplex mode, meaning that the relay can perform signal reception when transmits.
The relaying protocols (i.e., the AF and the DF) employ full duplex mode, meaning that the relay can perform signal reception when transmits.
2.2. AF-Based Cooperative Detection Scheme
An important requirement of a cognitive radio network is to detect the presence of primary users as quickly as possible. Suppose that the primary user starts using the spectrum band. Then, the two secondary users need to sense the unavailability of the band as soon as possible to avoid collision with primary user. However, when the wireless link between the primary user and  encounters shadowing fading, the signal received by
encounters shadowing fading, the signal received by  from the primary user is so weak that
from the primary user is so weak that  takes a long time to detect its presence. We show that by cooperation with
takes a long time to detect its presence. We show that by cooperation with  the detection probability of
the detection probability of  can be increased, thus reducing the overall detection time of the CR network.
can be increased, thus reducing the overall detection time of the CR network.
Throughout the paper, we allow the secondary user  to act as a cooperative relay for
to act as a cooperative relay for  . Figure 1 describes a scenario where two secondary users
. Figure 1 describes a scenario where two secondary users  and
and  are engaged in detecting the presence of primary user in a particular band. The whole implementation process of AF-CDS can be separated into two consecutive phases, that is,
are engaged in detecting the presence of primary user in a particular band. The whole implementation process of AF-CDS can be separated into two consecutive phases, that is,  in odd time slot
in odd time slot  , both
, both  and
and  receive the signals transmitted from primary user;
receive the signals transmitted from primary user;  in even time slot
in even time slot 
 starts relaying its received information to
starts relaying its received information to  in accordance with AF protocol, and thus, in this time slot,
in accordance with AF protocol, and thus, in this time slot,  would receive two signal copies simultaneously from the primary user and
would receive two signal copies simultaneously from the primary user and  respectively. In the time slot
respectively. In the time slot  the signals received by
the signals received by  and
and  can be expressed as
can be expressed as


where  and
and  are the additive complex Gaussian noise with zero mean and double-sided power spectral density
are the additive complex Gaussian noise with zero mean and double-sided power spectral density  and independent from each other. In the even slot
and independent from each other. In the even slot  the cooperative user,
the cooperative user,  relays the message from primary user to
relays the message from primary user to  According to AF protocol, the received signal
According to AF protocol, the received signal  as defined in (3) will be multiplied by a relay gain
as defined in (3) will be multiplied by a relay gain  and then forwarded to
and then forwarded to  without any sort of decoding. Meanwhile, in the slot
without any sort of decoding. Meanwhile, in the slot 
 simultaneously receives the signal from primary user. Therefore, the signal received by
simultaneously receives the signal from primary user. Therefore, the signal received by  in even time slot
in even time slot  can be written as
can be written as

where  denotes the instantaneous fading coefficient of the wireless channel from
denotes the instantaneous fading coefficient of the wireless channel from  to
to  and
and  denotes the zero-mean additive complex Gaussian noise with double-sided power spectral density
denotes the zero-mean additive complex Gaussian noise with double-sided power spectral density  Substituting
Substituting  from (4) into (5) gives
from (4) into (5) gives

For the convenience of theoretical analysis, consider relay gain  to compensate the fading distortion from
to compensate the fading distortion from  to
to  . Substituting this result into (6) yields
. Substituting this result into (6) yields

Now, the detection problem of  under AF-CDS can be stated as follows: given the observation
under AF-CDS can be stated as follows: given the observation

in the odd time slot and
and

in the even time slot  the detector decides on
the detector decides on

This is a standard detection problem for which there are many choices of detector available such as energy detector, matched filter detector and cyclostationary feature detector in the literatures [4–7]. In this paper, we use the energy detector (ED) [15] to show the advantage of the proposed cooperative scheme. The reasons for choosing ED are two-fold [13]:  We want to show the effect of user cooperation on detection of primary user in CR networks. Hence, the choice of detector is not critical;
We want to show the effect of user cooperation on detection of primary user in CR networks. Hence, the choice of detector is not critical;  We model the signal as a random variable with known power, and thus ED is optimal [15]. Let
We model the signal as a random variable with known power, and thus ED is optimal [15]. Let  and
and  be the output power of the ED of the secondary user
be the output power of the ED of the secondary user  in the odd time slot
in the odd time slot  under hypothesis
under hypothesis  and
and  , respectively. Thus, from (8), we can easily obtain
, respectively. Thus, from (8), we can easily obtain

Similarly, define  and
and  as the output power of
as the output power of  's ED in the even slot
's ED in the even slot  under hypothesis
under hypothesis  and
and  , respectively. Hence, from (9), we can get
, respectively. Hence, from (9), we can get


We will use (11)–(13) listed above to analyze the detection probability and detection time for the proposed AF-CDS in Section 3.
2.3. DF-Based Cooperative Detection Scheme
In this subsection, we present DF-CDS to achieve a better detection performance for CR networks. Consider the same scenario as AF-CDS with two secondary users  and
and  operating in a fixed TDMA mode for detecting the presence of primary user (see Figure 1). Here, according to DF protocol, the cooperative user
operating in a fixed TDMA mode for detecting the presence of primary user (see Figure 1). Here, according to DF protocol, the cooperative user  should regenerate the primary user indicator
should regenerate the primary user indicator  based on its received signals, and then transmit the estimated indicator
based on its received signals, and then transmit the estimated indicator  to
to  . Consequently, the detailed process of DF-CDS can be described as follows:
. Consequently, the detailed process of DF-CDS can be described as follows:  in the odd time slot
in the odd time slot  , both
, both  and
and  receive the signal from the primary user;
receive the signal from the primary user;  in the even time slot
in the even time slot 
 decodes its received information and forwards the decoding result to
decodes its received information and forwards the decoding result to  . Clearly, in odd time slots, the process of DF-CDS is the same as AF-CDS, implying that the output power of energy detector of
. Clearly, in odd time slots, the process of DF-CDS is the same as AF-CDS, implying that the output power of energy detector of  for DF-CDS in odd time slots can also be expressed as (11). Besides, in the even time slot
for DF-CDS in odd time slots can also be expressed as (11). Besides, in the even time slot  the signal received by
the signal received by  can be given by
can be given by

One can see that there are two possible cases for the decoding result of the primary user indicator, namely, the correct and the wrong decisions. Without loss of generality, let cases  and
and  denote the estimated indicator
denote the estimated indicator  and
and  , respectively. Let
, respectively. Let  and
and  be the output power of
be the output power of  's ED in even time slots for case
's ED in even time slots for case  under hypothesis
under hypothesis  and
and  , respectively. Thus, from (14), it is easy to obtain
, respectively. Thus, from (14), it is easy to obtain

Similarly, define  and
and  as the output power of
as the output power of  's ED for case
's ED for case  under hypothesis
under hypothesis  and
and  respectively. Thus, we can easily get
respectively. Thus, we can easily get

Now, we have described the system model and formulated the primary user detection problems for AF-CDS and DF-CDS, based on which a detailed performance analysis will be presented in the following.
3. Performance Analysis of the Proposed Schemes over Rayleigh Fading Channels
In this section, we investigate the detection probability and detection time for the proposed AF-CDS and DF-CDS in Rayleigh fading channels. For the purpose of comparison, let us consider first the noncooperative detection scheme and the existing AND-CDS (AND-based cooperative detection scheme) proposed in [8]. Given the transmitted signal  with power
with power  , the signal received by the user
, the signal received by the user  can be expressed as
can be expressed as

Hence, according to the energy detector principles, we can easily calculate the probability of detection of primary user by  under noncooperative scheme as
under noncooperative scheme as

where  is energy detection threshold that is determined by false alarm probability, which will be illustrated in the following. Note that the PDF of RV
is energy detection threshold that is determined by false alarm probability, which will be illustrated in the following. Note that the PDF of RV  can be given by
can be given by

where  is a unit step function. Thus, (18) can be further calculated by
is a unit step function. Thus, (18) can be further calculated by

Furthermore, from (17), the false alarm probability  can be given by
can be given by

Noting that  is zero-mean complex Gaussian noise with double-sided spectral power density
is zero-mean complex Gaussian noise with double-sided spectral power density  , we can easily obtain
, we can easily obtain  . Thus, the false alarm probability is calculated as
. Thus, the false alarm probability is calculated as

which results in

Substituting the threshold  from (23) into (20) yields
from (23) into (20) yields

where  is the transmitting signal-to-noise ratio (T-SNR). In a similar way, the detection probability of
is the transmitting signal-to-noise ratio (T-SNR). In a similar way, the detection probability of  under noncooperative scheme can be given by
under noncooperative scheme can be given by

We now investigate the overall detection probability for the cognitive radio network scenario depicted as Figure 1, that is, the probability that the presence of primary user is detected by both  and
and  . Since the two users independently detect the primary user in a distributed way, it can be easily shown that the overall detection probability is given by
. Since the two users independently detect the primary user in a distributed way, it can be easily shown that the overall detection probability is given by

where  and
and  are defined in (24) and (25), respectively. Besides, let
are defined in (24) and (25), respectively. Besides, let  be the number of slots taken by
be the number of slots taken by  (and
(and  ) to detect the presence of primary user under the noncooperation scheme. This detection time
) to detect the presence of primary user under the noncooperation scheme. This detection time  can be modeled as a geometric random variable, that is,
can be modeled as a geometric random variable, that is,

It can be easily shown that the overall detection time  is given by
is given by

Thus, from (28), we can calculate the average overall detection time  as
as

where  and
and  Then, we focus on the detection performance analysis for the existing cooperative sensing as presented in [8], where an AND-based cooperative detection scheme (AND-CDS) is proposed in order to combat the fading environments. Similarly to the sense protocols of the AF-CDS and DF-CDS, the implementation process of the AND-CDS is also divided into two phases for the convenience of making a fair comparison with our scheme, that is,
Then, we focus on the detection performance analysis for the existing cooperative sensing as presented in [8], where an AND-based cooperative detection scheme (AND-CDS) is proposed in order to combat the fading environments. Similarly to the sense protocols of the AF-CDS and DF-CDS, the implementation process of the AND-CDS is also divided into two phases for the convenience of making a fair comparison with our scheme, that is,  in odd time slot
in odd time slot 
 and
and  detect independently whether or not the primary user is active;
detect independently whether or not the primary user is active;  in subsequent even time slot
in subsequent even time slot  ,
,  forwards its detected result to
forwards its detected result to  who would then use the AND rule to fuse the detection results of
who would then use the AND rule to fuse the detection results of  and
and  . Clearly, it is easy to show the probability of detection of primary user by
. Clearly, it is easy to show the probability of detection of primary user by  in odd time slots being given by
in odd time slots being given by

where  is the false alarm probability. In even time slots,
is the false alarm probability. In even time slots,  would fuse the decision results by using AND rule, and thus, the corresponding detection probability and false alarm probability are calculated as (see [8] for details)
would fuse the decision results by using AND rule, and thus, the corresponding detection probability and false alarm probability are calculated as (see [8] for details)


Combining (31) and (32) gives

Hence, for any given time slot  , we can calculate the probability of detection of primary user by
, we can calculate the probability of detection of primary user by  using AND-based cooperation scheme as
using AND-based cooperation scheme as

where  and
and  are the probabilities of time slot
are the probabilities of time slot  belonging to odd and even, respectively. Generally, the probability events
belonging to odd and even, respectively. Generally, the probability events  follow an equal probability distribution, giving
follow an equal probability distribution, giving  . Substituting this result into (34) yields
. Substituting this result into (34) yields

In addition, the detection probability of  is easily given by
is easily given by

Therefore, the overall detection probability of the cognitive system using the AND-CDS can be given by

where the parameters  and
and  are defined in (35) and (36), respectively. Besides, the detection time slots,
are defined in (35) and (36), respectively. Besides, the detection time slots,  and
and  , taken by the secondary users
, taken by the secondary users  and
and  using AND-CDS, respectively, can be modeled as
using AND-CDS, respectively, can be modeled as

where  and
and  Thus, the overall detection time
Thus, the overall detection time  of the CR network by using AND-CDS can be given by
of the CR network by using AND-CDS can be given by

from which the corresponding average detection time  can be calculated as (see Appendix A for details)
can be calculated as (see Appendix A for details)

where the closed-form expressions of items (I), (II), (III), and (IV) can be found in Appendix A. Based on (40), we define a agility gain of the AND-CDS over the noncooperation scheme as

where the parameters  and
and  are given in (29) and (40), respectively. In the following, we focus on deriving the closed-form expressions of detection probabilities and agility gains for the AF-CDS and DF-CDS.
are given in (29) and (40), respectively. In the following, we focus on deriving the closed-form expressions of detection probabilities and agility gains for the AF-CDS and DF-CDS.
3.1. Detection Performance of AF-CDS
Obviously, from (11), we can show that the probability of detection of primary user by  in odd time slots is given by
in odd time slots is given by

In addition, from (9), we can calculate the probability of detection of primary user by  in even slots as
in even slots as

where  is given in (13) and
is given in (13) and  is determined by
is determined by

where  is given in (12). Thus, substituting
is given in (12). Thus, substituting  from (13) into (43) yields
from (13) into (43) yields

Note that RVs  and
and  follow the exponential distribution with parameters
follow the exponential distribution with parameters  and
and  , respectively, and independent from each other. Consequently, the joint PDF of
, respectively, and independent from each other. Consequently, the joint PDF of  can be written as
can be written as

combining (45) and (46) yields (see Appendix B for details)

Besides, from (44), the corresponding false alarm probability  is given by
is given by

from which we can obtain (see Appendix C for details)

where  is Lambert's W function. Substituting
is Lambert's W function. Substituting  from (49) into (47) gives
from (49) into (47) gives

Similarly to (35), we can calculate the probability of detection of primary user by  under AF-CDS as
under AF-CDS as

Meanwhile, the detection probability of  under AF-CDS can be easily given by
under AF-CDS can be easily given by

Hence, we can obtain the overall detection probability for the AF-CDS as

where  and
and  are defined in (51) and (52), respectively. Also, the detection time slots,
are defined in (51) and (52), respectively. Also, the detection time slots,  and
and  taken by the secondary users
taken by the secondary users  and
and  , respectively, can be modeled as
, respectively, can be modeled as

where  and
and  . Similarly, the overall detection time
. Similarly, the overall detection time  of the CR network under AF-CDS can be given by
of the CR network under AF-CDS can be given by

from which the corresponding average detection time  can be calculated as
can be calculated as

where the closed-form expressions of the summations of infinite series can be obtained in a similar way as shown in (40). We can use (56) as a performance evaluation to show the advantage of the proposed AF-CDS. In addition, the computational complexity of (56) is moderate since the corresponding closed-form expressions involve simple arithmetic operations only. Define the agility gain of the AF-CDS over the noncooperation scheme as

where  and
and  are given in (29) and (56), respectively.
are given in (29) and (56), respectively.
3.2. Detection Performance of DF-CDS
As has been said in Section 2.3, in odd time slots, the implementation process of DF-CDS is the same as AF-CDS, and thus the detection probability of  in odd time slots can be given by
in odd time slots can be given by

Without loss of generality, let case  and
and  denote the estimated indicator
denote the estimated indicator  and
and  respectively.
respectively.
Case 1 ([ = 0]).
= 0]).
This case corresponds to  implying
implying

Hence, the probability of occurrence of case  can be given by
can be given by

Also, it can be shown that

Substituting the threshold  from (61) into (60) yields
from (61) into (60) yields

From (15), we can easily calculate the corresponding detection probability as

Performing the probability integration in (63) yields

Case 2 ( ).
).
This case corresponds to  , meaning
, meaning

from which we can obtain

Therefore, from (16), it can be shown that

Hence, by using (62), (64), (66) and (67), the probability of detection of primary user by  in even time slots can be obtained as
in even time slots can be obtained as

According to (58) and (68), the probability of detection of primary user by  under DF-CDS is given by
under DF-CDS is given by

Besides, the detection probability of  under DF-CDS can be easily given by
under DF-CDS can be easily given by

Thus, we can obtain the overall detection probability of the CR network under DF-CDS as

where  and
and  are given in (69) and (70), respectively. Also, we can model the detection time slots
are given in (69) and (70), respectively. Also, we can model the detection time slots  and
and  (taken by the secondary users
(taken by the secondary users  and
and  under DF-CDS, resp.) as
under DF-CDS, resp.) as

In a similar way, we can obtain the average overall detection time  as
as

Similarly, the closed-form expressions of the summations of infinite series can be obtained as (40). Also, we will utilize (73) to show the merits of the proposed DF-CDS. Define the agility gain of the DF-CDS over the noncooperation scheme as

where  and
and  are given in (29) and (73), respectively.
are given in (29) and (73), respectively.
4. Numerical Results and Analysis
Figure 2 shows the plots of (26), (37), (53) and (71) as a function of T-SNR  with
with  ,
,  and
and  , where
, where  and
and  . From Figure 2, one can see that, the detection probabilities of the cooperative detection schemes (i.e., AND-CDS, AF-CDS and DF-CDS) are always larger than the noncooperation scheme across the whole range of T-SNR
. From Figure 2, one can see that, the detection probabilities of the cooperative detection schemes (i.e., AND-CDS, AF-CDS and DF-CDS) are always larger than the noncooperation scheme across the whole range of T-SNR  As observed from Figure 2, the proposed AF-CDS and DF-CDS outperform the traditional AND-CDS in terms of detection probability, showing the superiority of our schemes. Besides, it is shown from Figure 2 that the detection probability of DF-CDS is superior to the AF-CDS at low SNR region, but inferior to AF-CDS when
As observed from Figure 2, the proposed AF-CDS and DF-CDS outperform the traditional AND-CDS in terms of detection probability, showing the superiority of our schemes. Besides, it is shown from Figure 2 that the detection probability of DF-CDS is superior to the AF-CDS at low SNR region, but inferior to AF-CDS when  .
.

Detection probability performance versus T-SNR  with
with  ,
,  and
and  , where
, where  and
and  .
.
In Figure 3, we plot (26), (37), (53) and (71) as a function of false alarm probability  with
with 
 and
and  , where
, where  and
and  . It is seen from Figure 3 that the detection probability performances of the three cooperative schemes are much better than the noncooperation scheme. Also, Figure 3 shows that the detection performances of our schemes (i.e., AF-CDS and DF-CDS) are superior to the known AND-CDS scheme. In addition, one can see from Figure 3 that DF-CDS can achieve more performance gains than AF-CDS when
. It is seen from Figure 3 that the detection probability performances of the three cooperative schemes are much better than the noncooperation scheme. Also, Figure 3 shows that the detection performances of our schemes (i.e., AF-CDS and DF-CDS) are superior to the known AND-CDS scheme. In addition, one can see from Figure 3 that DF-CDS can achieve more performance gains than AF-CDS when  . Therefore, DF-CDS outperforms AF-CDS at low SNR region or high false alarm probability region.
. Therefore, DF-CDS outperforms AF-CDS at low SNR region or high false alarm probability region.

Detection probability versus false alarm probability with  ,
,  and
and  , where
, where  and
and  .
.
Figure 4 illustrates the agility gain versus T-SNR  of the AND-CDS, AF-CDS and DF-CDS with
of the AND-CDS, AF-CDS and DF-CDS with  ,
,  ,
,  and
and  , where the three curves are the plots of (41), (57) and (74), respectively. From the figure, we find that at this scenario, both the AF-CDS and the DF-CDS can achieve more agility gains than the AND-CDS across the whole T-SNR range, implying the advantages of the proposed schemes over the existing AND-CDS. For completeness sake, in Figure 5, we also plot the agility gains of the AND-CDS, AF-CDS and DF-CDS as a function of the false alarm probability
, where the three curves are the plots of (41), (57) and (74), respectively. From the figure, we find that at this scenario, both the AF-CDS and the DF-CDS can achieve more agility gains than the AND-CDS across the whole T-SNR range, implying the advantages of the proposed schemes over the existing AND-CDS. For completeness sake, in Figure 5, we also plot the agility gains of the AND-CDS, AF-CDS and DF-CDS as a function of the false alarm probability  As can be seen from Figure 5, the agility gains of the three cooperation schemes are larger than zero, showing the effectiveness of applying cooperation technology to spectrum sensing. In addition, from Figure 5, one can see that the proposed AF-CDS and DF-CDS outperform the known AND-CDS in terms of agility gain, which further confirms the merits of our schemes.
As can be seen from Figure 5, the agility gains of the three cooperation schemes are larger than zero, showing the effectiveness of applying cooperation technology to spectrum sensing. In addition, from Figure 5, one can see that the proposed AF-CDS and DF-CDS outperform the known AND-CDS in terms of agility gain, which further confirms the merits of our schemes.

Agility gain versus T-SNR with  ,
,  ,
,  and
and  , where
, where  and
and  .
.

Agility gain versus false alarm probability with  ,
,  ,
,  and
and  , where
, where  and
and  .
.
5. Conclusion
In this paper, we have presented two novel cooperative detection schemes (i.e., AF-CDS and DF-CDS) to improve the detection performance of cognitive radios. We have developed closed-form expressions of detection probability and agility gain for both AF-CDS and DF-CDS over Rayleigh fading channels. For the purpose of comparison, we have also analyzed the detection performances for the noncooperation and the AND-based cooperation schemes. Through conducting numerical experiments, it has been shown that both AF-CDS and DF-CDS are superior to the noncooperation and the AND-base cooperation schemes in terms of the detection probability and the agility gain. Furthermore, we have shown that DF-CDS outperforms AF-CDS at low SNR region or high false alarm probability region.
Appendices
A. Calculation of (40)
From (39), we can calculate the corresponding average detection time  as
as

Since RVs  and
and  are independent from each other, (A.1) can be further expressed as
are independent from each other, (A.1) can be further expressed as

where

Combining (A.2) and (A.3) gives

where

Similarly, we can obtain

B. Proof of Equation (47)
Combining (45) and (46) gives

where  . From (B.1), it is easy to obtain
. From (B.1), it is easy to obtain

Performing the integration in (B.2) yields

If  we can get
we can get

Else if  ,
,  is given by
is given by

which can be further simplified to

Thus, substituting  into (B.4) and (B.6) yields
into (B.4) and (B.6) yields

and this is (47).
C. Proof of Equation (49)
Rewrite (48) as

Note that both  and
and  are complex white Gaussian noise with zero mean and double-sided power spectral density
are complex white Gaussian noise with zero mean and double-sided power spectral density  Without loss of generality, let
Without loss of generality, let  denote the complex Gaussian noise, which can be expressed as
denote the complex Gaussian noise, which can be expressed as

where  and
and  . Obviously,
. Obviously,  and
and  follow the standard normal distribution, giving
follow the standard normal distribution, giving  , where
, where  is the chi-square distribution with 2 degrees of freedom. From (C.2), we can find
is the chi-square distribution with 2 degrees of freedom. From (C.2), we can find  , implying
, implying  Consequently, it is easily shown that
Consequently, it is easily shown that  and
and  are distributed as
are distributed as  . Noting that
. Noting that  and
and  are independent from each other, we obtain
are independent from each other, we obtain  . Let
. Let  , and thus its PDF (probability density function),
, and thus its PDF (probability density function),  , can be given by
, can be given by

Let  , resulting in
, resulting in  Hence, the CDF (cumulative distribution function) of
Hence, the CDF (cumulative distribution function) of  ,
,  is calculated as
is calculated as

Combining (C.3) and (C.4) gives

Performing the integration in (C.5) yields

From (C.1), we can obtain

Combining (C.6) and (C.7) gives

Here, we have utilized the positive property of the energy detection threshold  to obtain (C.8). Besides, (C.8) can be equivalently written as
to obtain (C.8). Besides, (C.8) can be equivalently written as

By using the Lambert's W function that is used to solve the equation

for  as a function of
as a function of  the parameter
the parameter  can be given by
can be given by

and this is (49).
References
Mitola J III: Software radios: survey, critical evaluation and future directions. IEEE Aerospace and Electronic Systems Magazine 1993, 8(4):25-36. 10.1109/62.210638
Haykin S: Cognitive radio: brain-empowered wireless communications. IEEE Journal on Selected Areas in Communications 2005, 23(2):201-220.
Akyildiz IF, Lee W-Y, Vuran MC, Mohanty S: NeXt generation/dynamic spectrum access/cognitive radio wireless networks: a survey. Computer Networks 2006, 50(13):2127-2159. 10.1016/j.comnet.2006.05.001
Sahai A, Hoven N, Tandra R: Some fundamental limits in cognitive radio. Proceedings of the Allerton Conference on Communication, Control, and Computing, October 2004, Monticello, Ill, USA
Kostylev VI: Energy detection of a signal with random amplitude. Proceedings of the IEEE International Conference on Communications (ICC 2002), 28 April–2 May 2002 3: 1606-1610.
Cabric D, Mishra SM, Brodersen RW: Implementation issues in spectrum sensing for cognitive radios. Proceedings of the 38th Asilomar Conference on Signals, Systems and Computers, November 2004 1: 772-776.
Fehske A, Gaeddert J, Reed JH: A new approach to signal classification using spectral correlation and neural networks. Proceedings of the 1st IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN '05), November 2005 144-150.
Ghasemi A, Sousa ES: Collaborative spectrum sensing for opportunistic access in fading environments. Proceedings of the 1st IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN '05), November 2005 131-136.
Laneman JN, Wornell GW: Distributed space-time-coded protocols for exploiting cooperative diversity in wireless networks. IEEE Transactions on Information Theory 2003, 49(10):2415-2425. 10.1109/TIT.2003.817829
Zou Y, Zheng B, Zhu J: Outage analysis of opportunistic cooperation over Rayleigh fading channels. IEEE Transactions on Wireless Communications 2009, 8(6):3077-3085.
Zou Y, Zheng B, Zhu X: A new cooperative diversity scheme for next generation wireless network. Proceedings of the 5th IEEE Consumer Communications and Networking Conference (CCNC '08), January 2008, Las Vegas, Nev, USA 938-942.
Zou Y, Zheng B, Zhu W-P: An opportunistic cooperation scheme and its BER analysis. IEEE Transactions on Wireless Communications 2009, 8(9):4492-4497.
Ganesan G, Li YG: Cooperative spectrum sensing in cognitive radio—part I: two user networks. IEEE Transactions on Wireless Communications 2007, 6(6):2204-2213.
Ganesan G, Li YG: Cooperative spectrum sensing in cognitive radio—part II: multiuser networks. IEEE Transactions on Wireless Communications 2007, 6(6):2214-2222.
Poor HV: An Introduction to Signal Detection and Estimation. Springer, Berlin, Germany; 1994.
Acknowledgments
This work was partially supported by the Postgraduate Innovation Programs of Scientific Research of Jiangsu Province (no. CX09B_150Z, CX08B_080Z), the Key Project of Nature Science Funding of Jiangsu Province (no. BK2007729), the National High Technology Research Development Plan (no. 2009AA01Z241), and the Major Development Program of Jiangsu Educational Committee (no. 06KJA51001).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License ( https://creativecommons.org/licenses/by/2.0 ), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Zhu, J., Zou, Y. & Zheng, B. Cooperative Detection for Primary User in Cognitive Radio Networks. J Wireless Com Network 2009, 617320 (2010). https://doi.org/10.1155/2009/617320
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1155/2009/617320