
Abstract
A cylindrical hydrogel tube, completely submerged in water, hydrates by swelling and filling its internal cavity. When it comes back into contact with air, it dehydrates: the tube thus expels the solvent through the walls, shrinking. This dehydration process causes a depression in the tube cavity, which can lead to circumferential buckling. Here we study the occurrence of such buckling using a continuous model that combines nonlinear elasticity with Flory–Rehner theory, to take into account both the large deformations and the active behaviour of the hydrogel. In quasi-static approximation, we use the incremental deformation formalism, extended to the chemo-mechanical equations, to determine the threshold value of the enclosed volume at which buckling is triggered. This critical value is found to depend on the shell thickness, chemical potential and constitutive features. The results obtained are in good agreement with the results of the finite element simulations of the complete dynamic problem.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Hydrogels are colloidal gels consisting of a self-supporting polymer network in which water is the dispersed medium. In recent years, they have been extensively studied because they can undergo large deformations, actively swelling and shrinking as a result of absorbing and releasing solvents in response to specific environmental conditions such as humidity, temperature and pH. Hydrogel-like materials are common in nature: the release of solvent in response to specific stimuli is used to fulfil precise functional requirements, such as the onset of specific deformation patterns and the distribution of fixed amounts of solvent to the external environment [1,2,3,4]. In industrial processes, hydrogels have also gained much attention for their promising role in a wide range of applications in recent emerging technologies, such as microfluidics, 3D bioprinting technology and drug delivery [2, 4,5,6,7,8,9,10]. For further details about synthesis, properties, and applications of hydrogels, we suggest the reading of S. B. Majee’s book [11] and E. M. Ahmed’s review [12].
In this paper, we study a two-dimensional problem related to the cross-sectional instability that occurs in a cylindrical hydrogel tube that passes from a completely wet state, with the cavity filled with water, to a state where the outer wall is exposed to air. The depression of the cavity, which is a consequence of water draining through the walls, causes the buckling from circular to wavy shapes of the tube cross-section.
The circumferential buckling is a common pattern of pressurized elastic rings [13,14,15], bi-layer tubes [16] and growing hollow cylinders [17]. A cylindrical elastic tube under a uniform radial external pressure (or, equivalently, under an inner depression) might, indeed, buckle circumferentially to a non-circular cross-section at a critical threshold. A number of studies have been performed in the literature to inspect how mechanical behaviours and geometrical properties of the tube affect the circumferential buckling, in terms of the preferred mode number and the critical threshold at which it occurs (see [17] and references therein). In bi-layer pipes, instead, the circumferential wrinkling may be induced by the radial incompatibility between the layers [16]. Other works [17,18,19,20,21,22] analyse this buckling instability in growing elastic tubes. Therein, growth is defined with respect to the initial reference configuration and the cumulative effect of the incremental growth process is represented by the growth tensor. Buckling is then parameterized in terms of radial and circumferential growth. Thus, it turns out a change in thickness due to growth induces a dramatic impact on circumferential buckling, in both the critical pressure and the buckling pattern.
A hollow cylinder-shaped hydrogel shell, completely immersed in water, hydrates by thickening and filling the internal cavity. When brought back into contact with air, it dehydrates: the shell expels the solvent through the walls, becoming thinner. The flow of solvent through the walls is induced by the difference in chemical potential between the inner and outer walls [23, 24]. Assuming that the inner cavity is always occupied by solvent, dehydration causes a depression in the cavity that can lead to circumferential buckling. As already observed in a similar study on spherical capsules [25], and in contrast to problems of pressure or growth-induced instability, the analysis here requires some extra care: the classical control parameter of the instability, which is the pressure exerted on the internal walls, is not known a priori. Indeed, in this problem, cavity pressure is the result of a complex interplay between elasticity, geometry and solvent flow induced by the difference in chemical potential between the inner and outer walls. Thus chemical potential, which drives the dehydration process, is the actual control parameter.
The article is organized as follows. In Sect. 2, we present the physical–mathematical model underlying the swelling of hydrogels, which combines elasticity theory with Flory-Renher theory. In Sect. 3, we report on the analysis of the bifurcation from the axisymmetric to the circumferentially wavy solution, under quasi-static hypothesis and using the method of incremental equations. We thus obtain a linear boundary problem that has to be simultaneously solved with the axisymmetric problem in finite deformations. As a result of this semi-analytical method, we obtain the critical threshold and the corresponding buckling mode, depending on the geometrical and constitutive parameters of the model. In Sect. 4, we discuss the results and compare them to the finite element simulations of the nonlinear dynamic model. Finally, we draw our conclusions in Sect. 5.
2 Model
The hydrogel model is set within the framework of stress-diffusion theories, which view the liquid-polymer mixture as a single homogenized continuum body, allow for a mass flux of the solvent, inherit the balance equations of the theory from the principle of null working and the solvent mass conservation law and include admissible constitutive processes which are consistent with the thermodynamic principles [26].

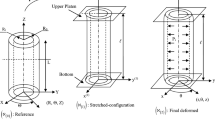
Schematic representation of the hydration/dehydration process. Dry state of the tube (left). Initial steady stress-free swollen state of the tube: water fills the cavity and the external environment (middle). After exposure to air, the dehydration process starts and water is expelled from both the walls and the tube (right)
The dry state \(\mathcal {B}_d\) of the gel is used as reference configuration (see Fig. 1). The chemo-mechanical description of the body is, then, complete once both the displacement field \({\textbf {u}}_d\), which gives the actual position \(\textbf{x}=\textbf{X}_d+\textbf{u}_d(t,\textbf{X}_d)\) of a point \(\textbf{X}_d\in \mathcal {B}_d\) at time t, and the water concentration \(c_d(t,\textbf{X}_d)\), that gives the moles of solvent per unit dry volume at \(\textbf{x}\), are known.
The free energy \(\psi _d\) per unit dry volume of the gel depends on the neo-Hookean elastic behaviour of the shell and on the polymer-water interplay as prescribed by the Flory-Rehner thermodynamic model [27, 28]. Furthermore, we assume that any change in volume of the body is accompanied by an equivalent uptake or release of water content, that is
where \(\Omega\) is the molar volume of the water and \(\det \textbf{F}_d\) the determinant of the deformation gradient in a plane strain framework. Thus, the free energy density \(\psi _d^{(r)}\) can be written as
with
where \(\mu _{w}\) is the chemical potential of pure water, and the shear-modulus \(G_d\) of the shell, the Flory parameter \(\chi\), the absolute temperature T and the gas constant \(\mathcal {R}\) assumed to be known. The field p represents the Lagrange multiplier related to the mechanical incompressibility constraint (2.1).
The reference stress tensor \(\textbf{S}_d\) and the chemical potential \(\mu\) of the liquid within the gel are
Both stress tensor and chemical potential consist of a constitutive component, denoted with a hat in (2.4), and a reactive one. In particular, \(\hat{\mu }(c_d)\) (delivering the so-called osmotic pressure \(\hat{\mu }(c_d)/\Omega\)) and \(p\Omega\) are the mixing and mechanical contributions to the chemical potential.
The water flux \(\textbf{h}_d\)
depends on the gradient of the chemical potential through the mobility (or, diffusivity) positive definite tensor \(\textbf{M}_d\), that we assume isotropic and linearly dependent on \(c_d\),
where D is the water diffusivity. The balance equations of the problem come from the balance of force and of liquid mass:
where, in neglecting the inertial term, we assumed that the solvent diffusion takes place on time scales much longer than any time scales associated with elastic propagation. As far as the boundary conditions are concerning, it is assumed that the external boundary is traction-free and that the chemical equilibrium holds, that is,
where \(\mu _{ext}\) is the chemical potential of the surrounding and \(\mathcal {T}\) is an \(\mathbb {R}\)-interval for the time variable. At the inner wall, it is taken into account the pressure \(p_i\) exterted by the liquid in the cavity on the cavity wall. The same pressure determines also the representation form of the chemical potential of the liquid in the cavity. So, we set
The simulation of air or water exposure of the shell corresponds to considering proper \({\mu _{\textrm{ext}}}\) values. We also assume that during the whole hydration/dehydration process, the cavity remains filled with water, i.e. no cavitation phenomena occur. Within this hypothesis, at any instant, the volume \(v_{\mathcal {C}}(t)\) of the cavity coincides with the volume \(v_{\mathcal {C}}^{(w)}(t)\) occupied by the water, that is, at any time it must hold:
Equation (2.10) is solved together with the balance Equations (2.7) and the incompressibility constraint (2.1) to find the fields \((\textbf{u}_d,c_d,p)\) and the scalar \(p_i\).
3 Dehydration-induced circumferential buckling
At the basis of the instability analysis, there are two key assumptions: (i) before instability occurs, the shell is still axisymmetric and (ii) the chemo-mechanical state there is determined as quasi-static solution of Equations (2.7). These hypotheses allow us to derive the axisymmetric solution of the quasi-static chemo-mechanical problem, as shown in the following. Details regarding calculus in cylindrical coordinates are contained in Appendix 1.
3.1 Stress-free swollen solution
The dry configuration \(\mathcal {B}_d\) is a hollow cylinder-shaped shell, of height L, with external radius B and thickness \(H_d=B-A\), A being the radius of its cavity \(\mathcal {C}_d\). Once immersed in water, the thickness of the shell increases until a swollen stress-free configuration \(\mathcal {B}_o\) is reached. Assuming plain strain deformation, the amount of absorbed solvent is determined by the equation
that corresponds to assume that the initial state \(\mathcal {B}_o\) the shell is a homogeneous state where \(\mu (R)=\mu _{w}\) (chemical equilibrium) and stress tensor \(\textbf{S}_d\) vanishes everywhere. In this in-plane homogeneous configuration, the shell has internal and external radii \(A_o\) and \(B_o\) equal to \(\sqrt{J_o}A\) and \(\sqrt{J_o}B\), respectively. We refer to this configuration as the stress-free swollen solution.
3.2 Axisymmetric solution
When the tube is taken out of the liquid bath and exposed to air, the chemical potential at the external wall \(\partial _e\mathcal {B}_d\) changes from \({\mu _{\textrm{ext}}}=\mu _w\) to \({\mu _{\textrm{ext}}}=\mu _a<\mu _w\). Consequently, water begins to be ejected through the outer shell wall. As long as the water is expelled, the cavity volume reduces and the inner walls \(\partial\mathcal {C}_d\) undergo an increasing but negative pressure field \(p_i\). Such suction effect makes the compressive stress at the inner boundary increase and, consequently, the corresponding configuration becomes progressively unstable until buckling occurs, helping the shell to relax the energy stored during the dehydration.
Assuming plane strain deformation of the tube cross-section, we first consider purely radial deformations as
where \((R,\Theta )\) and \((r,\theta )\) are the polar coordinates of a point in the reference dry configuration and in the current one, respectively. All quantities referred to such axisymmetric configuration are denoted with a subscript ‘0’.
The deformation gradient is then \(\textbf{F}_0=\text {diag}\left( r',r/R\right)\), where a prime denotes differentiation with respect to the radial coordinate R. Consequently, the local volume constraint (2.1) reduces to
while the Piola–Kirchhoff stress tensor in (2.4) becomes
where \(Q_0{:}{=}R/r\). Furthermore, (2.7)\(_1\) reduces to
where we used the identity \(Q_0'=Q_0\left( 1-J_0Q_0^2\right) R^{-1}\).
The water flux (2.5) is also assumed purely radial, i.e. \(\textbf{h}_0=\left( h_{0_R},0,0\right)\), with
and, after a first integration, the quasi-static version of the diffusion Equation (2.7)\(_2\), that is \(\text {Div}\,\textbf{h}_d=0\), yields
where \(C_0\) is an integration constant.
The boundary conditions (2.8) and (2.9) under the quasi-static diffusion assumption also reduce to
where
Notice that the two equations in (3.8b) can be combined to give a unique boundary condition on the inner wall:
Finally, in the quasi-static process of cavity emptying, we assume that time variable can be re-parametrized by the radius of the cavity, which is related to the volume of water enclosed. Thus, assigning the boundary condition
and solving a sequence of equilibrium problems with \(r_A\) progressively decreasing allows us to emulate the process of cavity emptying.
3.3 Incremental analysis
As the cavity empties, a critical value of the inner radius (or, equivalently, the enclosed area of the inner wall) is expected at which circumferential buckling occurs. In order to determine this critical threshold, we introduce a small parameter \(\varepsilon\) and the incremental fields \(u,v,p_1,J_1\) so that, up to \(O(\varepsilon )\), we have
with \(\{\hat{\textbf{e}}_R,\hat{\textbf{e}}_\Theta \}\) as the polar orthonormal basis. All quantities referred to the incremental configuration are denoted with a subscript ‘1’.
3.3.1 Incremental field equations
The incremental in-plane deformation gradient can be written as
that, in view of (2.1), leads to incremental incompressibility condition \(J_0\,\text {Tr}\left( \textbf{F}_0^{-1}\textbf{F}_1\right) =J_1\), that can be cast in the form
The incremental Piola–Kirchhoff stress tensor is
and, hence, its components in terms of the unknown fields read as
Consequently, Eq. (2.7)\(_1\) provides the two linear scalar equations
In a similar way, we obtain incremental water flux
where \(\mu _0\) is given by (3.9) and
Thus, the radial and azimuthal components of \({\textbf {h}}_1\) are
respectively, that have to satisfy the incremental diffusion equation
The local constraint (3.14) together with Eqs. (3.17) and (3.21) provides a system of four coupled partial differential equations for the unknowns \(u,v,p_1,J_1\) in the variable R and \(\Theta\), with coefficients depending on the cylindrical solution. To proceed, similarly to [17], we assume the following ansatz for the incremental fields
with n an integer representing the buckling mode, i.e. the number of folds in the buckled state. In this way, the incremental problem simplifies to a system of ordinary differential equations.
From the Eq. (3.14) we obtain
that allows to eliminate \(\mathcal {J}\) in the differential equations. Furthermore, to deal with (3.21) it is convenient, from a computational point of view, to consider the following expansion for the radial component of the incremental flux
and consider its amplitude \(\mathcal {H}\) as a further unknown. In so doing, by introducing the vector of unknowns \(\textbf{q}{:}{=}\left( \mathcal {U},\mathcal {U}',\mathcal {V},\mathcal {V}',\mathcal {P},\mathcal {H}\right)\), the system of ODEs can be recast in the form
where \(\textbf{A}_n\) is the \(6\times 6\) coefficient matrix, whose expressions are listed in Appendix 6.
3.3.2 Incremental boundary conditions
Before writing the incremental boundary conditions, let’s notice that the first-order term of the cavity volume \(v_{\mathcal {C}}\) vanishes. Indeed,
and the integral on the right-hand side of (3.26) is zero, due to the ansatz (3.22). As a consequence, the unknown pressure field \(p_i\) also remains unchanged up to the first order.
Then, the six boundary conditions, obtained by expanding (2.8) and (2.9) to the order \(\varepsilon\), read as
where \(p_i\) and \(\mathcal {J}\) are given by (3.8b)\(_2\) and (3.23), respectively, while \(\mathcal {S}_{1_{RR}}\) and \(\mathcal {S}_{1_{\Theta R}}\) are the amplitudes of the incremental stress tensor components \(S_{1_{RR}}=\mathcal {S}_{1_{RR}}(R)\cos (n\Theta )\) and \(S_{1_{\Theta R}}=\mathcal {S}_{1_{\Theta R}}(R)\sin (n\Theta )\).
3.3.3 Resuming the incremental boundary value problem
The goal is to find a value \(r_A\) of the cavity radius for which the incremental system (3.25) of ordinary differential equations admits a non-axisymmetric solution. We find convenient to introduce, in lieu of \(r_A\), the dimensionless parameter
representing the ratio between the actual volume of the cavity \(v_{\mathcal {C}}=L\pi r_A^2\) and the swollen one \(v_{\mathcal {C}_o}=L\pi r_{A_o}^2\). We expect to find a critical value \({\beta _{\textrm{c}}}<1\) at which a transition from the axisymmetric to a wrinkled shape occurs, as the former becomes unstable.

a Dimensionless cavity pressure \(p_i/G_d\) as a function of the dimensionless enclosed volume \(\beta\), comparison between quasi-static model (solid curve) and FEM simulation (dashed curve); red dashed line denotes the critical volume. Cross section shape of the shell at the critical point (b)
As the coefficients of the incremental equations are determined by the solution of the O(1) problem and the parameter \(\beta\) only appears in the boundary condition (3.11) of the O(1) problem, we need to solve the zeroth-order equations (3.3), (3.5), (3.7) and the first-order equations (3.25) simultaneously. For this purpose, the problem can be written as a unique system of first-order differential equations of the form
where \(\textbf{y}{:}{=}\left( r,p_0,J_0,\mathcal {U},\mathcal {U}',\mathcal {V},\mathcal {V}',\mathcal {P},\mathcal {H}\right)\) is the vector of unknowns, to which we must add the two unknown constants \(C_0\) and \(\beta\). Finally, we need a total of eleven boundary conditions: ten of these are given by Equs. (3.8a), (3.10), (3.11) and (3.27), while the eleventh is \(\mathcal {U}(A)\ne 0\) and imposes a nontrivial solution of the problem.
4 Results and discussion
Solutions of the above boundary value problem are obtained by using bvp4c in Matlab, with constitutive and geometric parameters chosen as in Table 1.
These solutions are then compared with the FEM simulations of the fully dynamic problem. Thus, equations (2.7) together with constitutive equations (2.4, 2.5) and constraints (2.1), (2.10), (2.8), (2.9) are rewritten in weak formulation and the full problem is restated as follows: find the value of the variables \(\textbf{u}_d\), \(c_d\), p, \(p_i\) and \(c_s\) (an auxiliary concentration variable used in the chemical boundary conditions) such that, for any test functions \(\tilde{\textbf{u}}_d\), \(\tilde{c}_d\), \(\tilde{p}\), \(\tilde{p}_i\) and \(\tilde{c}_s\), balance equations (2.7), volumetric constraints (2.1), (2.10), boundary conditions (2.8), (2.9) and initial conditions hold. The tube cross-section under plane deformation is discretized by a mapped mesh yielding about 20 thousands degrees of freedom. The problem is then solved in time using all quadratic Lagrange form functions, except for the variable p, for which a discontinuous linear Lagrange form function is used.
We first focus on the solution before the buckling occurs. In order to simulate the transition from water bath to air exposure of the tube, an external chemical potential is assigned in the FEM simulation that varies rapidly over time from the initial water potential to the plateau potential of the air. Figure 2a shows how the dimensionless pressure \(p_i/G_d\) on the cavity walls changes as dehydration proceeds. In particular, our quasi-static analysis (blue line) is here compared with what is obtained from FEM simulation of the dynamic process (dashed black line). The two curves show a remarkable agreement where the external chemical potential has reached its plateau value \(\mu _a\), that is equal to \(-2\cdot 10^3\) J/mol once \(\mu _w\) is taken as reference.
We stress that, while in the dynamic problem the applied chemical potential changes over time with an increasing ramp until reaching a plateau value, in the quasi-static problem, the assigned chemical potential corresponds to the plateau value (the air chemical potential). This is why the two curves differ so much on the left-hand side of Fig. 2. On the other hand, when in the dynamic problem the external potential reaches the plateau value, the two curves are in fact indistinguishable until the buckling occurs.

Critical ratio \({\beta _{\textrm{c}}}\) as a function of the external chemical potential \(\mu _{\text{ext}}\), for modes \(n=2,\ldots,8\). The vertical black line corresponds to the air chemical potential \(\mu _{\text{a}} = -2\cdot 10^3\) J/mol
As diffusion goes on, the inner pressure becomes negative, effectively realizing a suction effect on the cavity walls, which is responsible for the circumferential buckling. In accordance with FEM simulation, at \(\beta \approx 0.806\) the tube section buckles into four-sided shape, as depicted in Fig. 2b. On the other hand, the bifurcation analysis yields \(\beta _{\text{c}}=0.809\), for the buckling mode \(n=4\), which is in good agreement with the FEM simulation.
However, the perturbation analysis provides a critical threshold for each mode of buckling, for any applied chemical potential. Figure 3 sketches \({\beta _{\textrm{c}}}\) as a function of the applied chemical potential \({\mu _{\textrm{ext}}}\), for various modes n. In particular, the vertical black line corresponds to the air chemical potential \(\mu _{\text{a}} = -2\cdot 10^3\) J/mol. We note that, for any fixed value of \({\mu _{\textrm{ext}}}\), in the emptying process, i.e. gradually decreasing \(\beta\), the first critical threshold encountered is that of the mode \(n=2\). Furthermore, the critical thresholds are decreasing functions of the respective buckling mode n, which means that the higher modes are activated later.
By virtue of the above, we should expect that, in the emptying phase, the axisymmetric solution bifurcates into the \(n=2\) mode, instead of the \(n=4\) mode predicted by the FEM. The reason for this contradiction could be the subject of future work. Here we simply point out that, for the same buckling mode, bifurcation analysis and the FEM simulation give consistent results.

Critical ratio \({\beta _{\textrm{c}}}\) as function of the shell thickness A/B, with \(m=0.37\) (left) and \(m=0.16\) (right), according to (4.1). It is worth noting that in [25] an intersection was observed between the different curves for the spherical shell, while here in the case of the cylinder the coloured curves do not intersect each other
Another effect worth investigating through bifurcation analysis, in analogy to other work [17, 25], is the influence of relative shell thickness on critical threshold. Figure 4 shows the critical threshold as a function of the dimensionless thickness A/B, when \({\mu _{\textrm{ext}}}= \mu _{\textrm{a}}\). The two graphs in Fig. 4 correspond to two different values of the dimensionless parameter
which measures the hydrogel ability to be permeated by the solvent. Note that for each A/B value, the modes preserve the order of activation, i.e. the more wrinkled solutions are triggered with successively smaller critical thresholds. This feature is not shared by spherical shells [25], where thinner shells bifurcate in higher modes shapes and where critical thresholds are not monotonic functions of n. Moreover, as m decreases all thresholds are lowered, which means that to make a very permeable shell unstable, more cavity emptying is required.
The diamond-shape markers in Fig. 4 correspond to critical threshold obtained by FEM simulation. The agreement with the results provided by the bifurcation analysis is good for thin shells, while it seems to deteriorate (although still satisfactory) for thick cells. We think this difference is due to the rough approximation of the dynamic model with the quasi-static model used for the incremental analysis, which is not appropriate in the vicinity of the critical threshold where there is a sudden change in shape. To illustrate this, a comparison of the FEM simulations of the dynamic model and the corresponding quasi-static model is shown in Fig. 5. Two aspects emerge: the quasi-static model simulation, which provides a transcritical bifurcation, predicts a critical threshold in agreement with the bifurcation analysis. In contrast, the transition predicted by the full model is slightly delayed compared to the expected threshold. This delay is all the greater, the thicker the threshold. However, in the phases following the instability, the dynamic solution relaxes towards the quasi-static solution.

Dimensionless cavity pressure as a function of \(\beta\). The solid blue line refers to quasi-static axisymmetric solution, while the orange line corresponds to FEM simulation of the static model. The dashed black line refers to the FEM of the fully dynamic model. The values of the parameters used for the simulations are those in Table 1, choosing \(A/B=0.875\) (\(n=4\)) for the left-hand graph and \(A/B=0.667\) (\(n=3\)) for the right-hand graph
5 Conclusions
We studied the chemo-mechanical effect of dehydration on the circumferential instability of an elastic cylindrical tube. During dehydration, the tube drains water through the walls, deflating and emptying the cavity. This triggers a suction effect on the inner wall that causes the circumferential instability of the tube.
The tube is modelled as a Neo-Hookean elastic, incompressible solid, that can inflate/deflate by absorbing/expelling water. The diffusion of water in the body is governed by the Flory-Rehener equation. Buckling is examined as a bifurcation problem using the formalism of incremental equations, under the assumption of a quasi-static process. The analysis captures some relevant aspects of instability by predicting different modes of bifurcations, with more or less wrinkled profiles, and their critical thresholds. However, chemo-mechanical coupling complicates the perturbation analysis compared to the analogous problem for pressurized or incrementally growing shells (see [17] and references therein), as the pressure causing the instability is not a directly controllable parameter but is instead an unknown quantity.
In parallel, we simulated, via FEM based on the full dynamic model, the emptying of a hydrogel tube from a water bath to being exposed with the outer wall to air. The results found with the two methods are consistent and are in excellent agreement in the limit of thin shells.
References
C. Dawson, J.F. Vincent, A.-M. Rocca, How pine cones open. Nature 390(6661), 668–668 (1997)
I. Burgert, P. Fratzl, Actuation systems in plants as prototypes for bioinspired devices. Philosoph. Trans. Royal. Soc. Mathemat. Phys. Eng. Sci. 367(1893), 1541–1557 (2009)
X. Noblin, N.O. Rojas, J. Westbrook, C. Llorens, M. Argentina, J. Dumais, The fern sporangium: a unique catapult. Science 335(6074), 1322–1322 (2012)
R.M. Erb, J.S. Sander, R. Grisch, A.R. Studart, Self-shaping composites with programmable bioinspired microstructures. Nat. Commun. 4(1), 1–8 (2013)
C. Llorens, M. Argentina, N. Rojas, J. Westbrook, J. Dumais, X. Noblin, The fern cavitation catapult: mechanism and design principles. J. R. Soc. Interface 13(114), 20150930 (2016)
A. Egunov, J. Korvink, V. Luchnikov, Polydimethylsiloxane bilayer films with an embedded spontaneous curvature. Soft Matter 12(1), 45–52 (2016)
Y. Shi, J. Zhang, L. Pan, Y. Shi, G. Yu, Energy gels: a bio-inspired material platform for advanced energy applications. Nano Today 11(6), 738–762 (2016). https://doi.org/10.1016/j.nantod.2016.10.002
J. Li, D.J. Mooney, Designing hydrogels for controlled drug delivery. Nat. Rev. Mater. 1(12), 1–17 (2016)
C.B. Goy, R.E. Chaile, R.E. Madrid, Microfluidics and hydrogel: a powerful combination. React. Funct. Polym. 145, 104314 (2019). https://doi.org/10.1016/j.reactfunctpolym.2019.104314
I.M. El-Sherbiny, M.H. Yacoub, Hydrogel scaffolds for tissue engineering: progress and challenges. Global Cardiol. Sci. Practice 2013(3), 38 (2013)
S.B. Majee, Emerging Concepts in Analysis and Applications of Hydrogels. IntechOpen, Rijeka (2016). https://doi.org/10.5772/61692
E.M. Ahmed, Hydrogel: Preparation, characterization, and applications: a review. J. Adv. Res. 6(2), 105–121 (2015). https://doi.org/10.1016/j.jare.2013.07.006
G.F. Carrier, On the buckling of elastic rings. J. Math. Phys. 26(1–4), 94–103 (1947). https://doi.org/10.1002/sapm194726194
B. Dion, S. Naili, C. Renaudeaux, J.P. and Ribreau: Buckling of elastic tubes: study of highly compliant device. Med. Biol. Eng. Comput. 33(2), 196–201 (1995)
S.S. Turzi, Landau-like theory for buckling phenomena and its application to the elastica hypoarealis. Nonlinearity 33(12), 7114 (2020)
N. Emuna, N. Cohen, Circumferential instabilities in radially incompatible tubes. Mech. Mater. 147, 103458 (2020). https://doi.org/10.1016/j.mechmat.2020.103458
D.E. Moulton, A. Goriely, Circumferential buckling instability of a growing cylindrical tube. J. Mech. Phys. Solids 59(3), 525–537 (2011). https://doi.org/10.1016/j.jmps.2011.01.005
Y.-P. Cao, B. Li, X.-Q. Feng, Surface wrinkling and folding of core-shell soft cylinders. Soft Matter 8, 556–562 (2012). https://doi.org/10.1039/C1SM06354E
F. Jia, B. Li, Y.-P. Cao, W.-H. Xie, X.-Q. Feng, Wrinkling pattern evolution of cylindrical biological tissues with differential growth. Phys. Rev. E 91, 012403 (2015). https://doi.org/10.1103/PhysRevE.91.012403
L. Jin, Y. Liu, Z. Cai, Asymptotic solutions on the circumferential wrinkling of growing tubular tissues. Int. J. Eng. Sci. 128, 31–43 (2018). https://doi.org/10.1016/j.ijengsci.2018.03.005
R.-C. Liu, Y. Liu, Z. Cai, Influence of the growth gradient on surface wrinkling and pattern transition in growing tubular tissues. Proc. Royal Soc. Mathemat. Phys. Eng. Sci. 477(2254), 20210441 (2021). https://doi.org/10.1098/rspa.2021.0441
Y. Liu, T. Liang, Y. Fu, Y.-X. Xie, Y.-S. Wang, A novel buckling pattern in periodically porous elastomers with applications to elastic wave regulations. Extreme Mech. Lett. 54, 101781 (2022). https://doi.org/10.1016/j.eml.2022.101781
M. Curatolo, P. Nardinocchi, L. Teresi, Driving water cavitation in a hydrogel cavity. Soft Matter 14(12), 2310–2321 (2018)
M. Curatolo, P. Nardinocchi, L. Teresi, Modeling solvent dynamics in polymers with solvent-filled cavities. Mech. Soft Mater. 2(1), 1–16 (2020)
M. Curatolo, G. Napoli, P. Nardinocchi, S. Turzi, Dehydration-induced mechanical instabilities in active elastic spherical shells. Proc. Royal Soc. A 477(2254) (2021)
A. Lucantonio, P. Nardinocchi, L. Teresi, Transient analysis of swelling-induced large deformations in polymer gels. J. Mech. Phys. Solids 61(1), 205–218 (2013)
P.J. Flory, J. Rehner Jr., Statistical mechanics of cross-linked polymer networks I. Rubberlike elasticity. J. Chem. Phys. 11(11), 512–520 (1943)
P.J. Flory, J. Rehner Jr., Statistical mechanics of cross-linked polymer networks II. Swell. J. Chem. Phys. 11(11), 521–526 (1943)
Acknowledgements
This manuscript was also conducted under the auspices of the GNFM-INdAM.
Funding
Open access funding provided by Università del Salento within the CRUI-CARE Agreement. The work of G.N. has been funded by the MIUR Project PRIN 2020, “Mathematics for Industry 4.0”, Project No. 2020F3NCPX. The work of F.L. has been funded by POR Puglia FESR FSE 2014–2020. The work of P.N. has been funded by the Sapienza Grant no. RP122181616F65CA.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Data Availability
No data associated in the manuscript.
Appendices
Appendix A Calculus in cylindrical coordinates
Given a scalar-valued field in cylindrical coordinates \(f(R,\Theta ,Z)\), the gradient of f is
where \(\left\{ \hat{\textbf{e}}_R,\hat{\textbf{e}}_\Theta ,\hat{\textbf{e}}_Z\right\}\) is the standard orthonormal basis in cylindrical coordinates.
Let \(\textbf{v}= v_R(R,\Theta ,Z) \hat{\textbf{e}}_R + v_\Theta (R,\Theta ,Z) \hat{\textbf{e}}_\Theta +v_Z(R,\Theta ,Z) \hat{\textbf{e}}_Z\) then
and, hence,
Let \(\textbf{S}\) be a tensor, then the components of the divergence of \(\textbf{S}\) are
Appendix B Coefficients of the ODE system
Let
The non-vanishing coefficients of the linear system (3.25) are
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Curatolo, M., Lisi, F., Napoli, G. et al. Circumferential buckling of a hydrogel tube emptying upon dehydration. Eur. Phys. J. Plus 138, 382 (2023). https://doi.org/10.1140/epjp/s13360-023-03953-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-023-03953-y