
Abstract
The identification of b-jets, referred to as b-tagging, is an important part of many physics analyses in the ATLAS experiment at the Large Hadron Collider and an accurate calibration of its performance is essential for high-quality physics results. This publication describes the calibration of the light-flavour jet mistagging efficiency in a data sample of proton–proton collision events at \(\sqrt{s}=13\) TeV corresponding to an integrated luminosity of 139 fb\(^{-1}\). The calibration is performed in a sample of Z bosons produced in association with jets. Due to the low mistagging efficiency for light-flavour jets, a method which uses modified versions of the b-tagging algorithms referred to as flip taggers is used in this work. A fit to the jet-flavour-sensitive secondary-vertex mass is performed to extract a scale factor from data, to correct the light-flavour jet mistagging efficiency in Monte Carlo simulations, while simultaneously correcting the b-jet efficiency. With this procedure, uncertainties coming from the modeling of jets from heavy-flavour hadrons are considerably lower than in previous calibrations of the mistagging scale factors, where they were dominant. The scale factors obtained in this calibration are consistent with unity within uncertainties.
Similar content being viewed by others
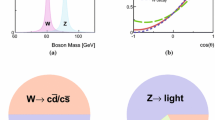
A new method to distinguish hadronically decaying boosted Z bosons from W bosons using the ATLAS detector

Measurements of b-jet tagging efficiency with the ATLAS detector using $$ t\overline{t} $$ events at $$ \sqrt{s}=13 $$ TeV

Avoid common mistakes on your manuscript.
1 Introduction
Many analyses in ATLAS [1], such as measurements or searches involving top quarks or Higgs bosons, rely on the identification of jets containing b-hadrons (b-jets) with high tagging efficiency and low mistagging efficiency for jets containing c-hadrons (c-jets) or containing neither b- nor c-hadrons (light-flavour jets). The relatively long lifetime and high mass of b-hadrons together with the large track multiplicity of their decay products is exploited by b-tagging algorithms to identify b-jets.
The b-tagging algorithms are trained using Monte Carlo (MC) simulated events and therefore need to be calibrated in order to correct for efficiency differences between data and simulation that may arise from an imperfect description of the data, e.g. in the parton shower and fragmentation modelling or in the detector and response simulation. The efficiency of identifying a b-jet (\(\varepsilon ^{b}\)) and the mistagging efficiencies (\(\varepsilon ^{c}\) and \(\varepsilon ^{\text {light}}\)), which are the probabilities that other jets are wrongly identified by the algorithms as b-jets, are measured in data and compared with the predictions of the simulation. These tagging and mistagging efficiencies are defined as
where \(f \in \{b,~c,~\text {light}\}\), \(N_{\textrm{pass}}^{f}\) is the number of jets of flavour f selected by the b-tagging algorithm and \(N_{\textrm{all}}^{f}\) is the number of all jets of flavour f. The flavour-tagging efficiency in data (\(\varepsilon ^{f}_{\textrm{data}}\)) is compared with the efficiency in MC simulation (\(\varepsilon ^{f}_{\textrm{MC}}\)) and a calibration factor, also called the scale factor (SF), is defined as
The calibration factors correct the efficiencies and mistagging efficiencies in simulation to the ones in data and are applied to all physics analyses in ATLAS that use b-tagging. The b-tagging efficiencies and the calibration SFs depend on the jet kinematics. The b-jet efficiency (\(\varepsilon ^{b}\)) is calibrated using the method described in Ref. [2], where the SFs\(^{b}\) are extracted from a sample of events containing top-quark pairs decaying into a final state with two charged leptons and two b-jets. The c-jet mistagging efficiency (\(\varepsilon ^{c}\)) is calibrated via the method described in Ref. [3], where the SFs\(^{c}\) are extracted from events containing top-quark pairs decaying into a final state with exactly one charged lepton and several jets. The events are reconstructed using a kinematic likelihood technique and include a hadronically decaying W boson, whose decay products are rich in c-jets.
This paper describes the measurement of the light-flavour jet mistagging efficiency (\(\varepsilon ^{\text {light}}\)) of the DL1r b-tagger, which is widely used in ATLAS Run 2 physics analyses and is discussed in Sect. 5. The SFs\(^{\text {light}}\) are extracted from particle-flow jets [4] using 139 \(\textrm{fb}^{-1}\) of proton–proton (pp) collision data collected by the ATLAS detector during Run 2 of the LHC.
The mistagging efficiency \(\varepsilon ^{\text {light}}\) is difficult to calibrate because after applying a b-tagging requirement, the obtained sample of jets is strongly dominated by b-jets and the fraction of light-flavour jets passing a selection on the b-tagging score is too low to estimate \(\varepsilon ^{\text {light}}_{\text {data}}\). In order to extract an unbiased and precise SF\(^{\text {light}}\), a sample enriched in mistagged light-flavour jets is required.
In this paper, the Negative Tag method [5, 6], which relies on a modified tagger with a reduced \(\varepsilon ^{b}\) and \(\varepsilon ^{c}\) but similar \(\varepsilon ^{\text {light}}\) with respect to the nominal tagger, is used. The method, described in detail in Sect. 6, has already been used to calibrate \(\varepsilon ^{\text {light}}\) by using dijet events in 2015–2016 data [7] from the early part of Run 2.
In this work, jets produced in association with Z bosons (Z+jets) are used instead, allowing the use of unprescaled lepton triggers instead of the prescaled single-jet triggers which were used in the previous calibration. The calibration precision is improved by extracting the SF\(^{\text {light}}\) in a fit that simultaneously corrects \(\varepsilon ^{b}\) using data. Previously, \(\varepsilon ^{b}\) was estimated from simulation, resulting in large modelling uncertainties which impacted the precision of the result. An alternative approach [7] to the Negative Tag method exists in which \(\varepsilon ^{\text {light}}_{\text {data}}\) is estimated from simulation by applying data-driven corrections to the input quantities of the low-level b-tagging algorithms. This method is used to assess the extrapolation uncertainty between the modified and nominal tagger as described in Sect. 7.
The paper is structured as follows. Section 2 describes the ATLAS detector. Section 3 presents the dataset and simulations used in this calibration. The reconstruction of jets, electrons and muons is summarised in Sect. 4, while the b-tagging algorithms are described in detail in Sect. 5. The calibration method is detailed in Sect. 6. Systematic uncertainties and results are presented, respectively, in Sects. 7 and 8 and conclusions are given in Sect. 9.
2 ATLAS detector
The ATLAS experiment [1] at the LHC is a multipurpose particle detector with a forward–backward symmetric cylindrical geometry and a near \(4\pi \) coverage in solid angle.Footnote 1 It consists of an inner tracking detector (ID) surrounded by a thin superconducting solenoid providing a 2 T axial magnetic field, electromagnetic and hadron calorimeters, and a muon spectrometer with a toroidal magnet system.
The inner tracking detector, which provides full coverage of a pseudorapidity range \(|\eta | < 2.5\), consists of silicon pixel, silicon microstrip, and transition radiation tracking detectors. The high-granularity silicon pixel detector covers the vertex region and typically provides four measurements per track, the first measurement normally being in the insertable B-layer (IBL) installed before Run 2, primarily to enhance the b-tagging performance [8, 9]. Sampling calorimeters, made of lead and liquid Argon (LAr), provide electromagnetic (EM) energy measurements with high granularity in the pseudorapidity region \(|\eta | < 3.2\). A steel/scintillator-tile hadron calorimeter covers the central pseudorapidity range (\(|\eta | < 1.7\)) and a copper/LAr hadron calorimeter covers the range \(1.5< |\eta | < 3.2\). The forward region is instrumented with LAr calorimeters in the range \(3.1< |\eta | < 4.9\), measuring both electromagnetic and hadronic energies in copper/LAr and tungsten/LAr modules. The muon spectrometer surrounds the calorimeters and is based on three large superconducting air-core toroidal magnets with eight coils each. The field integral of the toroids ranges between 2.0 and 6.0 Tm across most of the detector. The muon spectrometer includes a system of precision tracking chambers and fast detectors for triggering.
A two-level trigger system is used to select events. The first-level trigger is implemented in hardware and uses a subset of the detector information to accept events at a rate below 100 kHz. This is followed by a software-based trigger that reduces the accepted event rate to 1 kHz on average depending on the data-taking conditions [10].
An extensive software suite [11] is used in data simulation, in the reconstruction and analysis of real and simulated data, in detector operations, and in the trigger and data acquisition systems of the experiment.
3 Data and simulated samples
The presented results are based on data from pp collisions with a centre-of-mass energy of \(\sqrt{s}=13\) TeV and a 25 ns proton bunch crossing interval. The data were collected between 2015 and 2018 with the ATLAS detector, corresponding to an integrated luminosity of 139 \({\hbox {fb}^{-1}}\) [12, 13]. A set of single-electron [14] and single-muon triggers [15] were used, with transverse momentum (\(p_{\text {T}}\)) thresholds in the range 20–26 GeV and depending on the lepton flavour and data-taking period. All detector subsystems are required to have been operational during data taking and to fulfil data quality requirements [16].
Expected Standard Model (SM) processes were modelled using MC simulation. A summary of the simulated samples used in this calibration and their basic parameter settings is provided in Table 1. All samples were produced using the ATLAS simulation infrastructure [17] and Geant4 [18]. The effect of additional pp interactions per bunch crossing (pile-up) is accounted for by overlaying the hard-scattering process with minimum-bias events generated with Pythia 8.186 [19] using the NNPDF2.3lo set of parton distribution functions (PDF) [20] and the A3 set of tuned parameters [21]. Different pile-up conditions between data and simulation are taken into account by reweighting the mean number of interactions per bunch crossing in simulation to the number observed in data.
The events used in this study originate mostly from the production of a Z boson in association with jets. This process is simulated with two different generators. Nominal predictions of \(Z/\gamma ^{*}\) production were generated using Sherpa 2.2.1 [22] with the NNPDF3.0nnlo PDF [23]. Diagrams with up to two additional parton emissions were simulated with next-to-leading-order (NLO) precision in QCD, and those with three or four additional parton emissions to leading-order accuracy. Matrix elements were merged with the Sherpa parton shower using the MEPS@NLO formalism [24,25,26,27] with a merging scale of 20 GeV and the five-flavour numbering scheme (5FNS). The sample used to evaluate the tagging efficiencies predicted by the MC simulation was produced with the MadGraph 2.2.3 [28] event generator with up to four additional partons at matrix-element level interfaced with Pythia 8.210 to model the parton shower, hadronisation, and underlying event with the NNPDF3.0nlo PDF for the processes where the Z boson decays into muons or electrons, and with MadGraph 2.2.2 interfaced with Pythia 8.186 with the NNPDF2.3lo PDF [20] for Z boson decays into \(\tau \)-leptons. The predictions of the Z+jets MadGraph program are based on calculations using the 5FNS scheme. Sherpa 2.2.1 and MadGraph Z+jets simulations are normalised to the overall cross-section prediction at NNLO precision in QCD [29].
In addition to Z+jets production, some minor backgrounds contribute to the final event sample used for the calibration. These backgrounds consist mostly of diboson production (\(ZZ \) and \(ZW \)) and top-quark pair production with subsequent decays into final states with two charged leptons. The \(ZW \) production and the \(ZZ \) production via quark–antiquark annihilation were simulated with Sherpa 2.2.1 with a MEPS@NLO configuration similar to what was used in the simulation of the Z+jets process described above, while loop-induced ZZ processes initiated by gluon–gluon fusion were generated with Sherpa 2.2.2. Both the \(ZZ \) and \(ZW \) simulation samples used the NNPDF3.0nnlo PDF set. Top-quark pair production was simulated using the Powheg Box v2 generator at NLO precision in QCD [30] interfaced with Pythia 8.230 to model the parton shower, hadronisation, and underlying event, using the A14 set of tuned parameters [31]. This simulation was used to model top-quark pair production with subsequent decays into final states with two charged leptons and into final states with one charged lepton. The latter is used to evaluate the difference between the SFs obtained from the modified (DL1rFlip) and nominal (DL1r) b-tagging algorithms.
The decays of b- and c-hadrons were handled by EvtGen 1.6.0 [32] in all simulations, except for those generated using Sherpa, for which the default configuration recommended by the Sherpa authors was used.
4 Object and event selection
Tracks of charged particles are reconstructed from energy deposits in the material of the ID [33]. Events are required to contain at least one vertex with two or more associated tracks that must have \(p_{\text {T}} > 500\) MeV. Among all vertices, the vertex with the highest \(p_{\text {T}}^2\) sum of the associated tracks is taken as the primary vertex (PV) [34]. The transverse (\(d_{0}\)) track impact parameter (IP) is defined as the distance of closest approach of the track-trajectory to the PV in the transverse plane. The longitudinal track IP (\(z_{0}\)) is defined as the distance in the z-direction between the PV and the track trajectory at the point of the closest approach in the x–y plane.
Jets containing b- and c-hadrons are characterised by having in-flight decays due to the relatively long lifetime of the heavy-flavour hadrons and give rise to secondary vertices (SV) with associated tracks. To exploit the presence of in-flight decays in the jet direction, the signed IP is defined for each track within a jet. As shown in Fig. 1, a track has a positive IP if the angle between the jet direction and the line joining the PV to the point of closest approach to the track is less than \(\pi /2\) and negative otherwise. The Single Secondary Vertex Finder (SSVF) algorithm [35] is used for the reconstruction of the SV.

Graphical illustration of the signed IP of tracks in the jet
Electron candidates are reconstructed from energy clusters in the EM calorimeter matched to an ID track [36]. Candidates must satisfy \(p_{\text {T}} > 18\) GeV and \(|\eta | < 2.47\), excluding the barrel–endcap transition region of 1.37\(< |\eta | < \)1.52, and their associated tracks must fulfil \(|d_{0}|/\sigma _{d_{0}} < 5\) and \(|z_{0}|\sin \theta < 0.5\) mm, where \(\sigma _{d_{0}}\) is the uncertainty in \(d_{0}\). Electrons are identified using a likelihood-based discriminant that combines information about shower shapes in the EM calorimeter, track properties and the quality of the track-to-cluster matching [36]. Electrons must fulfill a ‘Tight’ identification selection. The gradient isolation criteria are applied to reject non-prompt electrons, using energy deposits in the ID and calorimeter within a cone around the electron. Their efficiency is 90% (99%) for electrons from \(Z\rightarrow ee\) decays at \(p_{\text {T}}=25~(60)\) GeV. Efficiency scale factors measured in data [36] are used to correct for differences in reconstruction, identification, isolation and trigger selection efficiencies between data and simulation.
Muon candidates are reconstructed by combining tracks in the ID with tracks in the muon spectrometer [37]. Only muons with \(|\eta | < 2.5\) and \(p_{\text {T}} > 18\) GeV are used. They have to fulfil the ‘Tight’ identification selection criteria [38] and satisfy \(|d_{0}| / \sigma _{d_{0}} < 3\) and \(|z_{0}|\sin \theta <0.5\) mm. The isolation requirement reduces the contamination from non-prompt muons by placing an upper bound on the amount of energy measured in the tracking detectors and the calorimeter (combined using the particle-flow algorithm [4]) within a cone of variable size (for \(p_{\text {T}}^\mu < 50\) GeV) or fixed size (for \(p_{\text {T}}^\mu > 50\) GeV) around the muon. Efficiency scale factors are used to correct for differences in muon reconstruction, identification, vertex association, isolation and trigger efficiencies between simulation and data [38].
Jets are reconstructed from particle-flow objects combining information from the tracker and calorimeter [4], using the anti-\(k_{t}\) algorithm [39, 40] with a radius parameter of \(R=0.4\). The jet energy is calibrated to the particle scale by using a sequence of corrections, including simulation-based corrections and in situ calibrations [41]. The jet-vertex tagging technique (JVT) [42], which uses a multivariate likelihood approach, is applied to jets with \(|\eta | < 2.4\) and \(p_{\text {T}} < 60\) GeV to suppress jets from pile-up activity. The ‘Tight’ selection criterion, corresponding to a JVT score > 0.5, is used. Scale factors are applied to match the JVT MC efficiencies to those in data. All selected jets must have a \(p_{\text {T}} > 20\) GeV and \(|\eta |< 2.5\).
The b-tagging algorithms use tracks matched to jets as input. This matching uses the angular separation between the track momenta, defined at the point of closest approach to the PV, and the jet axis, \(\Delta R(\mathrm {track,jet~axis})\). The selection requirement on \(\Delta R(\mathrm {track,jet~axis})\) varies as a function of the jet \(p_{\text {T}}\) because the b-hadron decay products are more collimated at larger hadron \(p_{\text {T}}\) [2].
The jet-flavour labelling in simulation is based on an angular matching of reconstructed jets to generator-level b-hadrons, c-hadrons and \(\tau \)-leptons with \(p_{\text {T}} > 5\) GeV. If a b-hadron is found within a cone of size \(\Delta R = 0.3\) around the jet axis, the jet is labelled as a b-jet. If no matching to any b-hadron is possible, the matching procedure is repeated sequentially for c-hadrons and \(\tau \)-leptons, and the matched jets are called c-jets and \(\tau \)-jets, respectively. A jet is labelled as a light-flavour jet by default if no matching to any of these particles was successful.
A series of requirements on the angular separation \(\Delta R\) between muons, electrons and jets are applied to remove overlaps between objects. If an electron candidate shares an ID track with a muon candidate, the electron candidate is rejected. Jets within a cone of \(\Delta R = 0.2\) around a lepton are rejected, unless the lepton is a muon and the jet has more than three associated tracks, in which case the muon is rejected. Finally, lepton candidates that are found to be \(0.2< \Delta R < 0.4\) from any remaining jet are discarded.
A jet sample enriched in light-flavour jets is needed for the calibration. A sample constructed using the leading jet in \(p_{\text {T}}\) in a Z+jets selection is expected to contain a 7%–8% fraction of c-jets and a 4%–6% fraction of b-jets, depending on the jet \(p_{\text {T}}\). The mistagging efficiency calibration is performed on the leading jet in a sample of Z+jets candidate events. The distinct signature of a Z boson decaying into either two electrons or two muons allows a clean sample of Z+jets events to be selected. Events are selected for further analysis using single-lepton triggers, where one of the leptons must be matched to an object that triggered the recording of the event. The event must contain exactly two prompt leptons with opposite charges and the same flavour (i.e. either exactly two electrons or exactly two muons). The leading lepton must have \(p_{\text {T}} > 28\) GeV and the invariant mass of the dilepton system, \(m_{\ell \ell }\), must satisfy \(81< m_{\ell \ell } < 101\) GeV. Only events with a reconstructed Z boson with \(p_{\textrm{T}}^{Z} > 50\) GeV are considered because the overall modelling is better in this range [43]. The event must also contain at least one jet with \(p_{\text {T}} > 20\) GeV and \(|\eta | < 2.5\).
The event yields obtained after applying all selection requirements are listed in Table 2, while comparisons between the predictions by the simulation and the data are shown in Fig. 2 for selected variables. The predictions of the MC simulation are normalised to data for these comparisons. The shapes of the distributions predicted by the simulation are consistent with those observed within statistical uncertainties for most of the considered kinematic range. The discrepancy observed in the SV mass (\(m_{\textrm{SV}}\)) distribution is expected because it is affected by a known mismodelling of the jet-flavour fractions [44, 45]; this is mitigated by the fit described in Sect. 6. The \(m_{\textrm{SV}}\) observable is calculated using the SSVF algorithm. Negative values of \(m_{\textrm{SV}}\) indicate that no SV was found in the jet. The mismodelling in jet \(p_{\text {T}}\) does not affect the calibration.

Comparisons between data and simulation for the most relevant kinematic variables after event selection. The MC expectations are normalised to data. The shaded area corresponds to the statistical uncertainties of the MC simulations. The Z+jets events are simulated using Sherpa 2.2.1. Negative values of \(m_{\textrm{SV}}\) indicate that no SV was found in the jet
5 The DL1r b-tagging algorithm
Properties of b-hadrons, such as their relatively high mass, long lifetime and large multiplicity of reconstructed tracks from their decay products, are exploited to distinguish b-jets from c-jets and light-flavour jets. Individual low-level taggers [46, 47] are designed to target the specific properties of b-jets. The IP2D, IP3D and RNNIP algorithms exploit the individual properties of the tracks from charged particles matched to the jet, especially the track \(d_{0}\) and \(z_{0}\). RNNIP is based on a recurrent neural network and it explores the correlations between the IPs of different selected tracks in the jet. The SV1 algorithm exploits the output of the SSVF algorithm and JetFitter [48] reconstructs secondary and tertiary vertices, following the expected topology of b-hadron decays. The DL1r algorithm is a deep neural network that takes the output of the low-level taggers and jet kinematics as input and builds a single discriminant [49, 50].
ATLAS analyses use selection requirements defining a lower bound on the DL1r discriminant to select b-jets with a certain efficiency. Four of these so-called single-cut operating points (OPs) are defined, corresponding to b-jet selection efficiencies of 85%, 77%, 70% and 60%. The OPs are evaluated in a sample of b-jets from simulated \(t\bar{t}\) events. These selection requirements divide the DL1r score into five intervals to form the pseudo-continuous OPs, where the lower edge of the lowest interval corresponds to 100% DL1r b-tagging efficiency, and the upper edge of the highest interval corresponds to 0% efficiency.
The single-cut and pseudo-continuous OPs are calibrated in order to correct for efficiency differences between data and simulation. The calibration SF, defined in Eq. (1), is measured relative to a reference efficiency \(\varepsilon ^{f}_{\textrm{MC}}\). The performance of the b-tagging algorithm in simulation is affected by the hadronisation and fragmentation model used in the parton shower simulation [43]. To account for their differences, simulation-to-simulation SFs are applied to those simulated samples that have a fragmentation model different from the default. The calculation of these simulation-to-simulation correction factors is described in Ref. [51]. The top-quark pair production sample produced with Powheg Box v2 + Pythia 8.230 is used to define the reference MC efficiencies in the b- and c-jet calibrations. As no equivalent Z+jets simulation produced with the Powheg Box v2 generator is available, the Z+jets MadGraph + Pythia 8 simulation is used for the definition of the reference efficiency in the calculation of SF\(^{\text {light}}\) for light-flavour jets. Since the Z+jets MadGraph + Pythia 8 simulation uses the same parton shower model and set of tuned parameters as the top-quark pair production simulation, the light-flavour jet results and the b- and c-jet calibrations are obtained relative to similar reference models.
6 The negative tag method
The DL1r algorithm rejects 97.52% and 99.96% of the light-flavour jets, respectively, at the 85% and 60% OPs, according to simulated \(t\bar{t}\) events. Therefore, the fraction of light-flavour jets passing the threshold is too low to estimate \(\varepsilon ^{\text {light}}\) in data. The Negative Tag method [5, 6] calibrates \(\varepsilon ^{\text {light}}_{\text {data}}\) using a modified version of the DL1r algorithm (called DL1rFlip) that achieves lower \(\varepsilon ^{b}\) to \(\varepsilon ^{\text {light}}\) ratios without changing \(\varepsilon ^{\text {light}}\) significantly.
Tracks matched to b-jets have relatively large and positively signed IPs due to the long lifetime of the b-hadrons and the presence of displaced decay vertices. In contrast, tracks matched to light-flavour jets typically have IP values consistent with zero within the IP resolution such that a more symmetricFootnote 2 IP distribution is expected. The expected IP distributions of the tracks associated with b-jets, c-jets or light-flavour jets are shown in Fig. 3. The Negative Tag method assumes that the probability for a light-flavour jet to be mistagged remains almost the same when inverting the IP signs of all tracks and displaced vertices. This is based on the assumption that light-flavour jets are misidentified as b-jets mainly due to resolution effects in the track reconstruction which result in tracks and vertices from tracks with positive IPs inside the jet. Given the symmetric IP distributions, the fractions of tracks and vertices from tracks with positive IPs remain stable after inverting the IP signs of all tracks and vertices. The presence of the positive tail in the IP distribution challenges this assumption and its impact is taken into account by a dedicated uncertainty, which is called the DL1rFlip-to-DL1r extrapolation uncertainty in the following.

Signed-\(d_{0}\) (left) and signed-\(z_{0}\) (right) distributions for tracks matched to b-jets, c-jets and light-flavour jets in simulated \(t\bar{t}\) events. The selected tracks are matched to particle-flow jets with \(p_{\text {T}}\,> 20\) GeV and \(|\eta |< 2.5\), and pass the jet-vertex tagger selection. The distributions are normalised to unity. Statistical uncertainties are also shown
The DL1rFlip algorithm inverts the signs of the track IPs and the decay length,Footnote 3 while using the same algorithm training and OP-threshold definitions as the DL1r algorithm. The \(\varepsilon ^{\text {light}}\) values obtained by the two algorithms are approximately the same, while the DL1rFlip algorithm selects a smaller fraction of b-jets than the nominal version. The discriminants of the DL1r and DL1rFlip algorithms are compared between data and simulation in Fig. 4. These comparisons show that the heavy-flavour fractions are much lower for high DL1rFlip values than for high DL1r values. At the 85% (60%) single-cut OP, the DL1r algorithm selects a sample of jets in which 25% (1%) are light-flavour jets, while the DL1rFlip algorithm selects a sample in which a higher fraction, 38% (6%), are light-flavour jets at the same OP.

Comparisons between data and simulation for the distributions of the DL1r discriminant (left) and DL1rFlip discriminant (right). Statistical uncertainties of the yields are shown
The calibration is performed independently in jet \({p_{\text {T}}}\) intervals in order to account for the \({p_{\text {T}}}\) dependence of \(\varepsilon ^{\text {light}}\). A simultaneous binned fit to the \(m_{\textrm{SV}}\) distribution in each pseudo-continuous interval of the DL1rFlip discriminant is performed in order to simultaneously determine \(\varepsilon ^{b}_{\text {data}}\) and \(\varepsilon ^{\text {light}}_{\text {data}}\) in the DL1rFlip discriminant intervals. The sensitivity of the fit does not allow the SFs of all three jet flavours to be derived simultaneously. Therefore, \(\varepsilon ^{c}_{\text {data}}\) is constrained to the MC predictions and SF\(^{c}\) is fixed to unity within an uncertainty of 30%, as suggested by studies of the c-jet mistagging efficiency calibration [3].
For a given interval of jet \({p_{\text {T}}}\), the expected number of jets for a defined discriminant interval i is given by
where \(N_{i,\text {MC}}\) is the predicted flavour-inclusive event yield for each discriminant interval; C is a global normalisation factor and \(F^{f}\) are the jet-flavour fractions; \(P_{i}^{f}\!(m_{\text {SV}})\) is the probability density function of \(m_{\text {SV}}\) for jet flavour f in the i-th DL1rFlip discriminant interval, taken from simulation. The \(P_{i}^{f}\!(m_{\text {SV}})\) is defined in such a way to integrate an additional bin (\(m_{\text {SV}}<0\) GeV) representing the number of events where no secondary vertex is found. The \(m_{\text {SV}}\) has been obtained with tracks with nominal sign as input to the SSVF algorithm.
The C, \(F^{f}\) and \(\text {SF}^{b,\text {light}}_{i}\) parameters are allowed to float in the fit, while \(N_{i,\text {MC}}\) and \(\varepsilon ^{f}_{i,\text {MC}}\) are fixed to the predictions from simulated events and \(\text {SF}^{c}_{i}\) is set to \(1.0\pm 0.3\). The constraints \(\sum _{i=1}^{5} \varepsilon _{i, \text {MC}}^{f} \times \text {SF}_{i}^{f} = 1\), where the contributions to the first bin (corresponding to the 100%−85% OP interval) are allowed to vary such that unitarity is preserved, and \(F^{\text {light}} = 1 - F^{b} - F^{c}\) are applied, reducing the number of free parameters to 11. Figure 5 shows the post-fit \(m_{\textrm{SV}}\) and DL1rFlip discriminant distributions for the 50–100 GeV \({p_{\text {T}}}\) interval. The parameters of interest, i.e. the \(\text {SF}^{\text {light}}_{i}\), are obtained from the DL1rFlip algorithm. In order to apply this calibration to the DL1r algorithm, an extrapolation uncertainty is added to account for the differences between these two tagging algorithms. Details of this DL1rFlip-to-DL1r extrapolation uncertainty are presented in Sect. 7.

Post-fit distribution of the DL1rFlip discriminant (left) and the \(m_{\textrm{SV}}\) distribution in the 77–70% OP interval (right). Both distributions are shown for the 50–100 GeV \(p_{\text {T}}\) interval. The shaded area corresponds to the total statistical uncertainty. The binning in \(m_{\textrm{SV}}\) allows good separation between the jet flavours and also uses the minimum number of bins necessary to constrain the free parameters of the fit. Choosing the coarsest binning possible allows the statistical uncertainties to be minimised
7 Systematic uncertainties
The measurement of SF\(^{\text {light}}\) is affected by four types of uncertainties, including those due to experimental effects, the modelling of the Z+jets and background processes, and the limited number of events in data and simulation. For each source of uncertainty, one parameter of the fit model is varied at a time, and the effect of this variation on SF\(^{\text {light}}\) is evaluated. This approach is chosen to prevent the fit from using the data to constrain the impact of individual systematic uncertainties. The probability density functions in \(m_{\textrm{SV}}\) are derived from the Sherpa 2.2.1 Z+jets simulation sample. The probability density function for each flavour component is separately normalised to unity, so only the shape of the \(m_{\textrm{SV}}\) distributions is estimated using the Sherpa 2.2.1 Z+jets simulation. The simulated efficiencies from the MadGraph Z+jets simulation listed in Table 1 are used in the likelihood definition to predict the expected number of events for each flavour category. Given that the flavour fractions and most SFs are extracted from the data, the systematic uncertainty calculation considers mainly effects on the template shapes. An additional uncertainty accounts for differences between SF\(^{\text {light}}\) values from the DL1rFlip and DL1r algorithms to ensure the applicability of this calibration to the DL1r algorithm.
Uncertainties in the modelling of the detector response have a negligible impact on the calibration results. The impact of the jet energy scale uncertainties was estimated by globally shifting the jet energy scale (JES) by 5%, in accord with the most conservative estimate of the JES uncertainty in \({p_{\text {T}}}\) derived in Ref. [41]. This conservative assumption about the magnitude of the jet energy scale uncertainties leads to an estimated impact of less than 1% on the calibration results, owing to the low \({p_{\text {T}}}\) dependence of the scale factors. The impact of \(d_{0}\) and \(z_{0}\) IP resolution modelling uncertainties on the \(m_{\textrm{SV}}\) templates was estimated by applying data-driven corrections to the simulated \(d_{0}\) and \(z_{0}\) in a sample of simulated top-quark pairs with a method similar to the one in Ref. [7]. The impact of these corrections is transfered to the fit templates and is symmetrised around the central value. This approach was chosen in order to mitigate the effect of statistical fluctuations in the available Z+jets samples. Other experimental uncertainties were found to be negligible because they are not correlated with the discriminant used in the fit.
Simulations of Z+jets via Sherpa 2.2.1 are used as the nominal model to derive the fit templates for b-jets, c-jets and light-flavour jets in the \(m_{\textrm{SV}}\) distribution. In order to assess the impact of the resulting choice of parton shower model, shower matching scheme and order of the perturbative QCD calculations on the template shapes, SFs\(^{\text {light}}\) are derived using an alternative model, provided by the Z+jets MadGraph + Pythia 8 simulation. The difference between the obtained SFs\(^{\text {light}}\) is taken as the estimate of the MC modelling uncertainty. The effect of QCD scale uncertainties is estimated by independently doubling or halving the renormalisation and factorisation scales. The impact of choosing a particular PDF set is estimated by propagating its uncertainties. However, the impacts of the QCD scale and PDF set uncertainties are found to be covered by the statistical uncertainties of the MC simulation and these uncertainties are therefore not included.
The effect of the 30% uncertainty in SF\(^{c}\), which was fixed to a value of 1.0 in the fit, is estimated by repeating the fit with SF\(^{c}\) set to 1.3 and 0.7 instead. The mean impact of the two variations on SF\(^{\text {light}}\) is taken as the impact of the charm calibration uncertainty on the light-flavour jet calibration.

Comparison of the light-flavour jet efficiency scale factor results for the DL1r and DL1rFlip tagger obtained with the MC-based calibration on a Powheg Box v2 + Pythia 8.230 \(t{\bar{t}}\) MC simulation, considering the 85% and 70% operating points, as a function of the jet \({p_{\text {T}}}\). The error bars correspond to MC statistical uncertainties. The lower panel shows the ratio of DL1rFlip to DL1r tagger MC-based calibration efficiency scale factors. The envelope of this ratio across the considered jet \({p_{\text {T}}}\) interval is used as an estimate for the impact of the tracking variable mismodelling on the difference between the DL1rFlip and DL1r calibrations, which is a part of the DL1rFlip-to-DL1r extrapolation uncertainty, estimating the impact of applying the calibrations derived for the DL1rFlip algorithm to the DL1r algorithm

SFs to calibrate the \(\varepsilon ^{\text {light}}\) of the pseudo-continuous OPs. The size of the uncertainty bands in the direction of the jet \({p_{\text {T}}}\) axis is arbitrary and corresponds to the choice of the calibration intervals in \({p_{\text {T}}}\)

SFs to calibrate the \(\varepsilon ^{\text {light}}\) of the single-cut OPs. The size of the uncertainty bands in the direction of the jet \(p_{\text {T}}\) axis is arbitrary and corresponds to the choice of the calibration intervals in \(p_{\text {T}}\)

DL1r mistagging efficiency calibration uncertainties. The breakdown of the different uncertainties is shown for the different OPs
The \(\varepsilon ^{\text {light}}\) value is assumed to be the same for DL1rFlip and DL1r to first order, as described in Sect. 6. However, mismodelling of the IP resolution, the fake-track rate or the parton shower can have different effects on the tagging performance and SF\(^{\text {light}}\) values of the DL1r and DL1rFlip algorithms. A DL1rFlip-to-DL1r extrapolation uncertainty is added to account for residual differences in SF\(^{\text {light}}\) between the two algorithms. SF\(^{\text {light}}\) cannot be measured in data for the DL1r algorithm. Therefore, a method similar to the one in Ref. [7] is used to derive SF\(^{\text {light}}\) for DL1rFlip and DL1r from MC simulation in order to compare the two calibrations. The DL1rFlip-to-DL1r extrapolation uncertainty consists of two components. One component estimates the impact of the modelling of tracking variables on the DL1rFlip and DL1r tagging performance, evaluated in a bottom-up approach correcting the simulation, and the second component estimates the impact of the shower and hadronisation model on the tagging performance difference between DL1rFlip and DL1r. The impact of the modelling of tracking variables is evaluated by applying data-driven corrections to underlying tracking variables affecting the b-tagging performance in a sample of simulated \(t{\bar{t}}\) events generated with Powheg Box v2 + Pythia 8.230. The impact on \(\varepsilon ^{\text {light}}\) of correcting these observables is evaluated with respect to the uncorrected simulation. Only corrections which have been shown to have a significant impact are considered [7]. These include the IP resolution and fake-track rate modelling [53]. The total impact on the mistagging efficiency is obtained by multiplying the effects of all corrections. The total impact on \(\varepsilon ^{\text {light}}_{\text {MC}}\) is compared between DL1r and DL1rFlip and the relative difference is assigned as the first component of the DL1rFlip-to-DL1r extrapolation uncertainty. A comparison of these simulation-based calibration factors is shown in Fig. 6. The impact of the parton shower modelling on the difference between SF\(^{\text {light}}\) in DL1r and DL1rFlip is estimated by multiplying the SFs\(^{\text {light}}\) for DL1r (DL1rFlip), derived using the corrected Powheg Box v2 + Pythia 8.230 simulation, by the simulation-to-simulation SFs defined as the ratio of the DL1r (DL1rFlip) \(\varepsilon ^{\text {light}}\) for the Sherpa 2.2.1 and the MadGraph + Pythia 8 simulations. The simulation-to-simulation SFs have been derived using the Z+jets samples listed in Table 1. This gives an estimate of the DL1rFlip-to-DL1r extrapolation uncertainty for an alternative shower model. The difference between this estimate and the estimate obtained using the corrected Powheg Box v2 + Pythia 8.230 simulation is used as the component assessing the impact of the shower and hadronisation model on the tagging performance difference between DL1rFlip and DL1r. The two components are added in quadrature to obtain the DL1rFlip-to-DL1r extrapolation uncertainty. The envelope over \({p_{\text {T}}}\) of the DL1rFlip-to-DL1r extrapolation uncertainty is used for the final uncertainty estimate. The shower modelling makes the largest contribution to the DL1rFlip-to-DL1r extrapolation uncertainty and ranges up to 10%. The largest uncertainty contribution in correcting the MC simulation is obtained from the track IP resolution modelling corrections, ranging up to 10% as well. The total DL1rFlip-to-DL1r extrapolation uncertainty is 10%–12% depending on the b-tagging OP and is the dominant systematic uncertainty overall.
Statistical uncertainties of the data and the \(m_{\textrm{SV}}\) templates from simulated MC events are taken into account. The statistical uncertainties of the MC-based fit templates are implemented following the light-weight Beeston–Barlow method [54]. As their effect is non-negligible, cross-check studies were performed using a ‘toy’ approach. The fit template bin entries were fluctuated randomly around the nominal value according to a Gaussian probability distribution with a standard deviation equal to the MC statistical uncertainty in the template bins. SF\(^{\text {light}}\) was extracted for each of these new fit templates and the standard deviation of the resulting SF\(^{\text {light}}\) distribution was taken as the statistical uncertainty. The statistical uncertainty estimates via the Beeston–Barlow model and the toy approach were found to be consistent.
8 Results
The calibration SFs\(^{\text {light}}\) of the DL1r algorithm are presented. The 85%, 77% and 70% OPs were successfully calibrated in data by using the Negative Tag method. However, it is not feasible to calibrate the 60% OP in data because of insufficient statistics and the relatively large contamination by heavy-flavour jets.
Due to these limitations and since the measured SFs for the closest 77–70% and 70–60% pseudo-continuous OPs do not show any significant deviation from unity compared to their respective measurement uncertainties, the assumption is made that the same must hold for the 60% OP. The SF for this OP is thus set to 1. Its dominant uncertainty, the DL1rFlip-to-DL1r extrapolation uncertainty, is derived specifically for the 60% OP, and found to be slightly larger than for the 70% OP. The other (sub-leading) uncertainties are assumed to be identical to the 70% OP, since their evaluation suffers from large uncertainties. It should also be noted that extracting very precise SFs\(^\text {light}\) for the 60–0% pseudo-continuous OP interval is not critical to most physics analyses as only around 0.5 per mille of all light-flavour jets are b-tagged at this OP [49].
The results for the mistagging efficiency calibration of light-flavour jets from the DL1r tagger, using particle-flow jets in Run 2 data, are shown in Fig. 7 for the pseudo-continuous OPs of the DL1r algorithm. The calibration of the DL1r single-cut OPs, which is derived from the calibration results of the pseudo-continuous OPs, is shown in Fig. 8. Furthermore, Fig. 9 shows a breakdown of the uncertainties in the SFs\(^{\text {light}}\) for each jet \(p_{\text {T}}\) interval and single-cut OP.
The measured SFs\(^{\text {light}}\) are consistent with unity within uncertainties, except for the 85–77% pseudo-continuous OP and the 85% single-cut OP, where the data prefer SFs\(^{\text {light}}\) which differ from one by about one standard deviation. Therefore, the results indicate the MC simulation predicts \(\varepsilon ^{\text {light}}\) to be similar to that in data.
Mistags of light-flavour jets are mostly caused by the presence of fake tracks and the limited impact parameter resolution [7]. The fake-track rate is underestimated by the MC simulation and the impact parameter resolution is overestimated [7, 53]. An increase in the fake-track rate and a decrease in impact parameter resolution both give rise to larger mistagging efficiencies [7, 55]. Observed SFs slightly larger than unity are therefore expected.
Tables 3, 4, 5 and 6 feature a detailed breakdown of the uncertainties in the results. Overall, the largest systematic uncertainty is the DL1rFlip-to-DL1r extrapolation uncertainty, with values of 10–12%, depending on the b-tagging OP. The impact of the charm calibration uncertainty amounts to 5–10% depending on the jet \({p_{\text {T}}}\) and the b-tagging OP, and is therefore one of the larger uncertainties. The MC modelling uncertainty is a few percent in most cases, but reaches its maximum of 11% for the 70% single-cut OP in the \(20 \le \text {jet}~{p_{\text {T}}} \le 50\) GeV interval.
The effect of the \(d_{0}\) and \(z_{0}\) impact parameter resolution modelling uncertainty is generally of the order of a few percent and therefore mostly subdominant. However, the effect can range up to 14% for low jet \(p_{\text {T}}\) and tight OPs. The data statistical uncertainties give subdominant contributions except for high jet \({p_{\text {T}}}\) and tight OPs, where contributions range from 0.5 to 9.5%. The MC statistical uncertainty is one of the dominant contributions, ranging from 0.4 to 13%, depending on the OP and the jet \({p_{\text {T}}}\). The total uncertainty in SF\(^{\text {light}}\) is between 11 and 23%. In general, higher precision is obtained for the looser OPs and the size of the dominant uncertainties does not depend significantly on the jet \({p_{\text {T}}}\).
In the previous calibration with the Negative Tag method using dijet events in 2015–2016 data, the total uncertainty in SF\(^{\text {light}}\) ranged from 14% to 76% for jets with \({p_{\text {T}}}\) between 20 and 300 GeV. Dominant uncertainties arose from the modelling of the track impact parameter resolution and the uncertainty in the fraction of heavy-flavour jets which was estimated using simulation. The reduced uncertainty in the present calibration stems from both improved modelling of the track impact parameters in simulation and the \(m_{\text {SV}}\) fit, which allows the extraction of SF\(^{\text {light}}\) while simultaneously correcting \(\varepsilon ^{b}\) and the jet-flavour fractions using data. Previously, \(\varepsilon ^{b}\) and the heavy-flavour fractions were estimated from simulation, resulting in large modelling uncertainties, which were a limiting factor in the precision of the result.
9 Conclusions
The light-flavour jet mistagging efficiency \(\varepsilon ^{\text {light}}\) of the DL1r b-tagging algorithm has been measured with a 139 \({\hbox {fb}^{-1}}\) sample of \(\sqrt{s}=13~\hbox {TeV}\) pp collision events recorded during 2015–2018 by the ATLAS detector at the LHC. The measurement is based on an improved method applied to a sample of Z+jets events. The Negative Tag method, based on the application of an alternative b-tagging algorithm, designed to facilitate the measurement of the light-flavour jet mistagging efficiency, is used. Data-to-simulation scale factors for correcting \(\varepsilon ^{\text {light}}\) in simulation are measured in four different jet transverse momentum intervals, ranging from 20 to 300 GeV, for four separate quantiles of the b-tagging discriminant. The scale factors typically exceed unity by around 10–20%, with total uncertainties ranging from 11 to 23%, and do not exhibit any strong dependence on jet transverse momentum. These calibration uncertainties are considerably lower than the previous 14% to 76% uncertainties from the Negative Tag method using 2015–2016 data.
Data Availability Statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: All ATLAS scientific output is published in journals, and preliminary results are made available in Conference Notes. All are openly available, without restriction on use by external parties beyond copyright law and the standard conditions agreed by CERN. Data associated with journal publications are also made available: tables and data from plots (e.g. cross section values, likelihood profiles, selection efficiencies, cross section limits, ...) are stored in appropriate repositories such as HEPDATA (http://hepdata.cedar.ac.uk/). ATLAS also strives to make additional material related to the paper available that allows a reinterpretation of the data in the context of new theoretical models. For example, an extended encapsulation of the analysis is often provided for measurements in the framework of RIVET (http://rivet.hepforge.org/).” This information is taken from the ATLAS Data Access Policy, which is a public document that can be downloaded from http://opendata.cern.ch/record/413 [opendata.cern.ch].]
Notes
ATLAS uses a right-handed coordinate system with its origin at the nominal interaction point in the centre of the detector and the \(z\)-axis along the beam pipe. The \(x\)-axis points from the interaction point to the centre of the LHC ring, and the \(y\)-axis points upwards. Cylindrical coordinates \((r,\phi )\) are used in the transverse plane, \(\phi \) being the azimuthal angle around the \(z\)-axis. The pseudorapidity is defined in terms of the polar angle \(\theta \) as \(\eta = -\ln \tan (\theta /2)\). The angular distance is measured in units of \(\Delta R \equiv \sqrt{(\Delta \eta )^{2} + (\Delta \phi )^{2}}\).
The tracks matched to light-flavour jets have a slight bias towards positive-sign values due to the presence of some long-lived particles (e.g. \(K_\text {S}\) or \(\Lambda \)). The contribution from the mismodelling of long-lived particles is expected to be negligible relative to the mismodelling of the \(d_0\) and \(z_0\) resolutions [7].
In this paper, vertices are assigned a negative decay length if they have an angle between the jet direction and the line joining the primary vertex to the secondary vertex of more than \(\pi /2\) (see Sect. 14.2 of Ref. [52] for more details).
References
ATLAS Collaboration, The ATLAS Experiment at the CERN Large Hadron Collider. JINST 3, S08003 (2008)
ATLAS Collaboration, ATLAS \(b\)-jet identification performance and efficiency measurement with \(t{\bar{t}}\) events in \(pp\) collisions at \(\sqrt{s}=13 TeV\). Eur. Phys. J. C 79, 970 (2019). arXiv:1907.05120 [hep-ex]
ATLAS Collaboration, Measurement of the \(c\)-jet mistagging efficiency in \(t{\bar{t}}\) events using \(pp\) collision data at \(\sqrt{s}=13 TeV\) collected with the ATLAS detector. Eur. Phys. J. C 82, 95 (2021). arXiv:2109.10627 [hep-ex]
ATLAS Collaboration, Jet reconstruction and performance using particle flow with the ATLAS Detector. Eur. Phys. J. C 77, 466 (2017). arXiv:1703.10485 [hep-ex]
ATLAS Collaboration, Calibration of the performance of \(b\)-tagging for \(c\) and light-flavour jets in the 2012 ATLAS data, ATLAS-CONF-2014-046 (2014). https://cds.cern.ch/record/1741020
D0 Collaboration, Measurement of the \(t{\bar{t}}\) production cross section in \(pp\) collisions at \(\sqrt{s}=1.96 TeV\) using secondary vertex \(b\) tagging. Phys. Rev. D 74, 112004 (2006). arXiv:hep-ex/0611002
ATLAS Collaboration, Calibration of light-flavour \(b\)-jet mistagging rates using ATLAS proton–proton collision data at \(\sqrt{s}=13 TeV\), ATLAS-CONF-2018-006 (2018). https://cds.cern.ch/record/2314418
ATLAS Collaboration, ATLAS Insertable B-Layer: Technical Design Report, ATLAS-TDR-19; CERN-LHCC-2010-013 (2010). https://cds.cern.ch/record/1291633 (Addendum: ATLAS-TDR-19-ADD-1; CERN-LHCC-2012-009, 2012, url: https://cds.cern.ch/record/1451888)
B. Abbott et al., Production and integration of the ATLAS Insertable B-Layer. JINST 13, T05008 (2018). arXiv:1803.00844 [physics.ins-det]
ATLAS Collaboration, Performance of the ATLAS Trigger System in 2015. Eur. Phys. J. C 77, 317 (2017). arXiv:1611.09661 [hep-ex]
ATLAS Collaboration, The ATLAS Collaboration Software and Firmware, ATL-SOFT-PUB-2021-001 (2021). https://cds.cern.ch/record/2767187
ATLAS Collaboration, Luminosity determination in \(pp\) collisions at \(\sqrt{s}=13 TeV\) using the ATLAS detector at the LHC (2022). arXiv:2212.09379 [hep-ex]
G. Avoni et al., The new LUCID-2 detector for luminosity measurement and monitoring in ATLAS. JINST 13, P07017 (2018)
ATLAS Collaboration, Performance of electron and photon triggers in ATLAS during LHC Run 2. Eur. Phys. J. C 80, 47 (2020). arXiv:1909.00761 [hep-ex]
ATLAS Collaboration, Performance of the ATLAS muon triggers in Run 2. JINST 15, P09015 (2020). arXiv:2004.13447 [hep-ex]
ATLAS Collaboration, ATLAS data quality operations and performance for 2015.2018 data-taking. JINST 15, P04003 (2020). arXiv:1911.04632 [physics.ins-det]
ATLAS Collaboration, The ATLAS Simulation Infrastructure. Eur. Phys. J. C 70, 823 (2010). arXiv:1005.4568 [physics.ins-det]
S. Agostinelli et al., Geant4: a simulation toolkit. Nucl. Instrum. Methods A 506, 250 (2003)
T. Sjöstrand, S. Mrenna, P. Skands, A brief introduction to PYTHIA 8.1. Comput. Phys. Commun. 178, 852 (2008). arXiv:0710.3820 [hep-ph]
NNPDF Collaboration, R.D. Ball et al., Parton distributions with LHC data. Nucl. Phys. B 867, 244 (2013). arXiv:1207.1303 [hep-ph]
ATLAS Collaboration, The Pythia 8 A3 tune description of ATLAS minimum bias and inelastic measurements incorporating the Donnachie–Landshoff diffractive model, ATL-PHYS-PUB-2016-017 (2016). https://cds.cern.ch/record/2206965
T. Gleisberg et al., Event generation with SHERPA 1.1. JHEP 02, 007 (2009). arXiv:0811.4622 [hep-ph]
The NNPDF Collaboration, R.D. Ball et al., Parton distributions for the LHC run II. JHEP 04, 040 (2015). arXiv:1410.8849 [hep-ph]
S. Catani, F. Krauss, B.R. Webber, R. Kuhn, QCD matrix elements + parton showers. JHEP 11, 063 (2001). arXiv:hep-ph/0109231
S. Höche, F. Krauss, M. Schönherr, F. Siegert, QCD matrix elements + parton showers. The NLO case. JHEP 04, 027 (2013). arXiv:1207.5030 [hep-ph]
S. Höche, F. Krauss, S. Schumann, F. Siegert, QCD matrix elements and truncated showers. JHEP 05, 053 (2009). arXiv:0903.1219 [hep-ph]
S. Hoche, F. Krauss, M. Schonherr, F. Siegert, A critical appraisal of NLO+PS matching methods. JHEP 09, 049 (2012). arXiv:1111.1220 [hep-ph]
J. Alwall et al., The automated computation of tree-level and next-to-leading order differential cross sections, and their matching to parton shower simulations. JHEP 07, 079 (2014). arXiv:1405.0301 [hep-ph]
C. Anastasiou, L. Dixon, K. Melnikov, F. Petriello, High-precision QCD at hadron colliders: Electroweak gauge boson rapidity distributions at next-to-next-to leading order. Phys. Rev. D 69, 094008 (2004). arXiv:hep-ph/0312266
S. Frixione, P. Nason, C. Oleari, Matching NLO QCD computations with parton shower simulations: the POWHEG method. JHEP 11, 070 (2007). arXiv:0709.2092 [hep-ph]
ATLAS Collaboration, ATLAS Pythia 8 tunes to 7 TeV data, ATL-PHYS-PUB-2014-021 (2014). https://cds.cern.ch/record/1966419
D.J. Lange, The EvtGen particle decay simulation package. Nucl. Instrum. Methods A 462, 152 (2001)
ATLAS Collaboration, Performance of the ATLAS track reconstruction algorithms in dense environments in LHC Run 2. Eur. Phys. J. C 77, 673 (2017). arXiv:1704.07983 [hep-ex]
ATLAS Collaboration, Vertex Reconstruction Performance of the ATLAS Detector at \(\sqrt{s}=13 TeV\), ATL-PHYS-PUB-2015-026 (2015). https://cds.cern.ch/record/2037717
ATLAS Collaboration, Secondary vertex finding for jet flavour identification with the ATLAS detector, ATL-PHYS-PUB-2017-011 (2017). https://cds.cern.ch/record/2270366
ATLAS Collaboration, Electron and photon performance measurements with the ATLAS detector using the 2015–2017 LHC proton–proton collision data. JINST 14, P12006 (2019). arXiv:1908.00005 [hep-ex]
ATLAS Collaboration, Muon reconstruction performance of the ATLAS detector in proton–proton collision data at, \(\sqrt{s}=13 TeV\). Eur. Phys. J. C 76, 292 (2016). arXiv:1603.05598 [hep-ex]
ATLAS Collaboration, Muon reconstruction and identification efficiency in ATLAS using the full Run 2 \(pp\) collision data set at \(\sqrt{s}=13 TeV\). Eur. Phys. J. C 81, 578 (2021). arXiv:2012.00578 [hep-ex]
M. Cacciari, G.P. Salam, G. Soyez, The anti-\({k_{t}}\)jet clustering algorithm. JHEP 04, 063 (2008). arXiv:0802.1189 [hep-ph]
M. Cacciari, G.P. Salam, G. Soyez, FastJet user manual. Eur. Phys. J. C 72, 1896 (2012). arXiv:1111.6097 [hep-ph]
ATLAS Collaboration, Jet energy scale and resolution measured in proton.proton collisions at \(\sqrt{s}=13 TeV\) with the ATLAS detector. Eur. Phys. J. C 81, 689 (2020). arXiv:2007.02645 [hep-ex]
ATLAS Collaboration, Performance of pile-up mitigation techniques for jets in \(pp\) collisions at \(\sqrt{s}=8 TeV\) using the ATLAS detector. Eur. Phys. J. C 76, 581 (2016). arXiv:1510.03823 [hep-ex]
ATLAS Collaboration, Measurements of b-jet tagging efficiency with the ATLAS detector using \(t{\bar{t}}\) events at \(\sqrt{s}=13 TeV\). JHEP 08, 089 (2018). arXiv:1805.01845 [hep-ex]
ATLAS Collaboration, Measurements of the production cross-section for a \(Z\) boson in association with \(b\)-jets in proton.proton collisions at \(\sqrt{s}=13 TeV\) with the ATLAS detector. JHEP 07, 044 (2020). arXiv:2003.11960 [hep-ex]
C.M.S. Collaboration, Measurement of differential cross sections for \(Z\) bosons produced in association with charm jets in pp collisions at \(\sqrt{s}=13 TeV\). JHEP 04, 109 (2021). arXiv:2012.04119 [hep-ex]
ATLAS Collaboration, Optimisation of the ATLAS \(b\)-tagging performance for the 2016 LHC Run, ATL-PHYS-PUB-2016-012 (2016). https://cds.cern.ch/record/2160731
ATLAS Collaboration, Identification of Jets Containing \(b\)-Hadrons with Recurrent Neural Networks at the ATLAS Experiment, ATL-PHYS-PUB-2017-003 (2017). https://cds.cern.ch/record/2255226
ATLAS Collaboration, Topological \(b\)-hadron decay reconstruction and identification of \(b\)-jets with the JetFitter package in the ATLAS experiment at the LHC, ATL-PHYS-PUB-2018-025 (2018). https://cds.cern.ch/record/2645405
ATLAS Collaboration, Expected performance of the 2019 ATLAS \(b\)-taggers (2019). http://atlas.web.cern.ch/Atlas/GROUPS/PHYSICS/PLOTS/FTAG-2019-005/
ATLAS Collaboration, Optimisation and performance studies of the ATLAS \(b\)-tagging algorithms for the 2017-18 LHC run, ATL-PHYS-PUB-2017-013 (2017). https://cds.cern.ch/record/2273281
ATLAS Collaboration, Monte Carlo to Monte Carlo scale factors for flavour tagging efficiency calibration, ATL-PHYS-PUB-2020-009 (2020). https://cds.cern.ch/record/2718610
ATLAS Collaboration, Performance of \(b\)-jet identification in the ATLAS experiment, JINST 11, P04008 (2016). arXiv:1512.01094 [hep-ex]
ATLAS Collaboration, Early Inner Detector Tracking Performance in the 2015 Data at \(\sqrt{s}=13 TeV\), ATL-PHYS-PUB-2015-051 (2015). https://cds.cern.ch/record/2110140
K. Cranmer, G. Lewis, L. Moneta, A. Shibata, W. Verkerke, HistFactory: a tool for creating statistical models for use with RooFit and RooStats, CERN-OPEN-2012-016 (2012). https://cds.cern.ch/record/1456844
ATLAS Collaboration, Expected Performance of the ATLAS experiment-detector, trigger and physics (2009). arXiv:0901.0512 [hep-ex]
ATLAS Collaboration, ATLAS Computing Acknowledgements, ATL-SOFT-PUB-2021-003 (2021). https://cds.cern.ch/record/2776662
Acknowledgements
We thank CERN for the very successful operation of the LHC, as well as the support staff from our institutions without whom ATLAS could not be operated efficiently. We acknowledge the support of ANPCyT, Argentina; YerPhI, Armenia; ARC, Australia; BMWFW and FWF, Austria; ANAS, Azerbaijan; CNPq and FAPESP, Brazil; NSERC, NRC and CFI, Canada; CERN; ANID, Chile; CAS, MOST and NSFC, China; Minciencias, Colombia; MEYS CR, Czech Republic; DNRF and DNSRC, Denmark; IN2P3-CNRS and CEA-DRF/IRFU, France; SRNSFG, Georgia; BMBF, HGF and MPG, Germany; GSRI, Greece; RGC and Hong Kong SAR, China; ISF and Benoziyo Center, Israel; INFN, Italy; MEXT and JSPS, Japan; CNRST, Morocco; NWO, Netherlands; RCN, Norway; MEiN, Poland; FCT, Portugal; MNE/IFA, Romania; MESTD, Serbia; MSSR, Slovakia; ARRS and MIZŠ, Slovenia; DSI/NRF, South Africa; MICINN, Spain; SRC and Wallenberg Foundation, Sweden; SERI, SNSF and Cantons of Bern and Geneva, Switzerland; MOST, Taiwan; TENMAK, Turkey; STFC, UK; DOE and NSF, United States of America. In addition, individual groups and members have received support from BCKDF, CANARIE, Compute Canada and CRC, Canada; PRIMUS 21/SCI/017 and UNCE SCI/013, Czech Republic; COST, ERC, ERDF, Horizon 2020 and Marie Skłodowska-Curie Actions, European Union; Investissements d’Avenir Labex, Investissements d’Avenir Idex and ANR, France; DFG and AvH Foundation, Germany; Herakleitos, Thales and Aristeia programmes co-financed by EU-ESF and the Greek NSRF, Greece; BSF-NSF and MINERVA, Israel; Norwegian Financial Mechanism 2014-2021, Norway; NCN and NAWA, Poland; La Caixa Banking Foundation, CERCA Programme Generalitat de Catalunya and PROMETEO and GenT Programmes Generalitat Valenciana, Spain; Göran Gustafssons Stiftelse, Sweden; The Royal Society and Leverhulme Trust, UK. The crucial computing support from all WLCG partners is acknowledged gratefully, in particular from CERN, the ATLAS Tier-1 facilities at TRIUMF (Canada), NDGF (Denmark, Norway, Sweden), CC-IN2P3 (France), KIT/GridKA (Germany), INFN-CNAF (Italy), NL-T1 (Netherlands), PIC (Spain), ASGC (Taiwan), RAL (UK) and BNL (USA), the Tier-2 facilities worldwide and large non-WLCG resource providers. Major contributors of computing resources are listed in Ref. [56].
Author information
D. Bruncko, I. A. Budagov, E. F. Torregrosa, V. Gratchev, M. Lokajicek, J. Olszowska, L. Perini, S. Yu. Sivoklokov.
Authors and Affiliations
Department of Physics, University of Adelaide, Adelaide, Australia
M. Amerl, E. K. Filmer, P. Jackson, A. X. Y. Kong, H. Potti, T. A. Ruggeri, E. X. L. Ting & M. J. White
Department of Physics, University of Alberta, Edmonton, AB, Canada
D. M. Gingrich, J. H. Lindon, N. Nishu & J. L. Pinfold
Department of Physics, Ankara University, Ankara, Türkiye
O. Cakir, H. Duran Yildiz, S. Kuday & I. Turk Cakir
Division of Physics, TOBB University of Economics and Technology, Ankara, Türkiye
S. Sultansoy
LAPP, Université Savoie Mont Blanc, CNRS/IN2P3, Annecy, France
C. Adam Bourdarios, N. Berger, F. Costanza, M. Delmastro, L. Di Ciaccio, C. Goy, T. Guillemin, T. Hryn’ova, S. Jézéquel, I. Koletsou, J. Levêque, D. J. Lewis, J. D. Little, N. Lorenzo Martinez, G. Poddar, E. Rossi, A. Sanchez Pineda, E. Sauvan & L. Selem
APC, Université Paris Cité, CNRS/IN2P3, Paris, France
G. Bernardi, M. Bomben, R. Bouquet, G. Di Gregorio, A. Li, G. Marchiori, Q. Shen & Y. Zhang
High Energy Physics Division, Argonne National Laboratory, Argonne, IL, USA
S. Chekanov, S. Darmora, W. H. Hopkins, J. Hoya, E. Kourlitis, T. LeCompte, J. Love, J. Metcalfe, A. S. Mete, A. Paramonov, J. Proudfoot, P. Van Gemmeren, R. Wang & J. Zhang
Department of Physics, University of Arizona, Tucson, AZ, USA
S. Berlendis, E. Cheu, Z. Cui, A. Ghosh, K. A. Johns, W. Lampl, R. E. Lindley, P. Loch, J. P. Rutherfoord, J. Sardain, E. W. Varnes, H. Zhou & Y. Zhou
Department of Physics, University of Texas at Arlington, Arlington, TX, USA
D. Bakshi Gupta, B. Burghgrave, J. C. J. Cardenas, K. De, A. Farbin, H. K. Hadavand, A. J. Myers, N. Ozturk, G. Usai & A. White
Physics Department, National and Kapodistrian University of Athens, Athens, Greece
S. Angelidakis, D. Fassouliotis, L. Fountas, I. Gkialas & C. Kourkoumelis
Physics Department, National Technical University of Athens, Zografou, Greece
T. Alexopoulos, C. Bakalis, I. Drivas-koulouris, E. N. Gazis, C. Kitsaki, S. Maltezos, C. Paraskevopoulos, M. Perganti & P. Tzanis
Department of Physics, University of Texas at Austin, Austin, TX, USA
T. Andeen, C. D. Burton, K. Choi, P. U. E. Onyisi, D. K. Panchal, M. Tost, M. Unal & A. F. Webb
Institute of Physics, Azerbaijan Academy of Sciences, Baku, Azerbaijan
N. Huseynov
Institut de Física d’Altes Energies (IFAE), Barcelona Institute of Science and Technology, Barcelona, Spain
M. N. Agaras, M. Bosman, J. I. Carlotto, M. P. Casado, L. Castillo Garcia, S. Epari, V. Gautam, S. Gonzalez Fernandez, C. Grieco, S. Grinstein, A. Juste Rozas, S. Kazakos, I. Korolkov, J. Mamuzic, M. Martinez, P. Martinez Suarez, L. M. Mir, J. L. Munoz Martinez, N. Orlando, A. Pacheco Pages, C. Padilla Aranda, I. Riu, A. Salvador Salas, A. Sonay & S. Terzo
Institute of High Energy Physics, Chinese Academy of Sciences, Beijing, China
J. Barreiro Guimarães da Costa, Y. Cai, X. Chu, H. Cui, Y. Fan, Y. Fang, F. Guo, Y. F. Hu, Y. Huang, X. Jia, M. Li, S. Li, Z. Li, Z. Liang, B. Liu, P. Liu, X. Lou, G. Lu, F. Lyu, A. F. Mohammed, L. Y. Shan, J. Wu, S. Xin, D. Xu, Z. Xu, X. Yang, M. Zhai, K. Zhang, P. Zhang, C. Zhu, H. Zhu & X. Zhuang
Physics Department, Tsinghua University, Beijing, China
X. Chen, M. Feng, H. Pang, M. Xia & Y. Xu
Department of Physics, Nanjing University, Nanjing, China
H. Chen, S. J. Chen, A. De Maria, L. Han, X. Huang, Z. Jia, S. Jin, H. Li, Y. Liu, F. L. Lucio Alves, T. Min, X. Wang, Y. Wang, L. Xia, H. Ye, B. Zhang & L. Zhang
University of Chinese Academy of Science (UCAS), Beijing, China
Y. Cai, X. Chu, H. Cui, Y. Fang, F. Guo, Y. F. Hu, X. Jia, M. Li, S. Li, Z. Li, Y. Liu, X. Lou, G. Lu, A. F. Mohammed, K. Ran, J. Wu, S. Xin, M. Zhai, K. Zhang, P. Zhang & C. Zhu
Institute of Physics, University of Belgrade, Belgrade, Serbia
E. Bakos, L. J. Beemster, J. Jovicevic, V. Maksimovic, Dj. Sijacki, N. Vranjes, M. Vranjes Milosavljevic & L. Živković
Department for Physics and Technology, University of Bergen, Bergen, Norway
T. Buanes, J. I. Djuvsland, G. Eigen, N. Fomin, S. K. Huiberts, G. R. Lee, A. Lipniacka, B. Martin dit Latour, B. Stugu & A. Traeet
Physics Division, Lawrence Berkeley National Laboratory, Berkeley, CA, USA
D. J. A. Antrim, R. M. Barnett, J. Beringer, P. Calafiura, F. Cerutti, A. Ciocio, A. Dimitrievska, G. I. Dyckes, K. Einsweiler, I. Ene, M. G. Foti, L. G. Gagnon, M. Garcia-Sciveres, C. Gonzalez Renteria, H. M. Gray, C. Haber, S. Han, T. Heim, I. Hinchliffe, X. Ju, K. Krizka, C. Leggett, Z. Marshall, M. Muškinja, B. P. Nachman, G. J. Ottino, S. Pagan Griso, V. R. Pascuzzi, M. Pettee, E. Pianori, E. D. Resseguie, E. Reynolds, B. R. Roberts, S. N. Santpur, M. Shapiro, B. Stanislaus, V. Tsulaia, C. Varni, H. Wang, J. Xiong, T. Yamazaki, W.-M. Yao, B. K. Yeo & Z. Zhang
Institut für Physik, Humboldt Universität zu Berlin, Berlin, Germany
C. Appelt, N. B. Atlay, M. Bahmani, D. Battulga, A. Cortes-Gonzalez, S. Grancagnolo, C. Issever, T. J. Khoo, K. Kreul, H. Lacker, T. Lohse, M. Michetti, A. Nayaz, Y. S. Ng, V. H. Ruelas Rivera, C. Scharf, F. Schenck, P. Seema, T. Theveneaux-Pelzer & H. A. Weber
Albert Einstein Center for Fundamental Physics and Laboratory for High Energy Physics, University of Bern, Bern, Switzerland
H. P. Beck, M. Chatterjee, L. Franconi, L. Halser, S. Haug, A. Ilg, R. Müller, A. P. O’Neill, M. M. Schefer & M. S. Weber
School of Physics and Astronomy, University of Birmingham, Birmingham, UK
P. P. Allport, A. D. Auriol, P. Bellos, G. A. Bird, J. Bracinik, D. G. Charlton, A. S. Chisholm, H. G. Cooke, P. M. Freeman, W. F. George, L. Gonella, F. Gonnella, N. A. Gorasia, C. M. Hawkes, S. J. Hillier, M. Marinescu, A. M. Mendes Jacques Da Costa, T. J. Neep, P. R. Newman, K. Nikolopoulos, J. M. Silva, A. Stampekis, J. P. Thomas, P. D. Thompson, G. S. Virdee, R. J. Ward, A. T. Watson & M. F. Watson
Department of Physics, Bogazici University, Istanbul, Türkiye
E. Celebi, B. Gokturk, S. Istin, K. Y. Oyulmaz & V. E. Ozcan
Department of Physics Engineering, Gaziantep University, Gaziantep, Türkiye
A. Bingul & Z. Uysal
Department of Physics, Istanbul University, Istanbul, Türkiye
A. Adiguzel
Istinye University, Sariyer, Istanbul, Türkiye
A. J. Beddall, S. A. Cetin, S. Ozturk & S. Simsek
Facultad de Ciencias y Centro de Investigaciónes, Universidad Antonio Nariño, Bogotá, Colombia
G. Navarro & Y. Rodriguez Garcia
Departamento de Física, Universidad Nacional de Colombia, Bogotá, Colombia
C. Sandoval
Dipartimento di Fisica e Astronomia A. Righi, Università di Bologna, Bologna, Italy
G. Carratta, N. Cavalli, L. Clissa, S. De Castro, F. Del Corso, L. Fabbri, M. Franchini, A. Gabrielli, L. Rinaldi, A. Sbrizzi, N. Semprini-Cesari, M. Sioli, K. Todome, S. Valentinetti, M. Villa & A. Zoccoli
INFN Sezione di Bologna, Bologna, Italy
G. L. Alberghi, F. Alfonsi, L. Bellagamba, D. Boscherini, A. Bruni, G. Bruni, M. Bruschi, G. Cabras, G. Carratta, N. Cavalli, A. Cervelli, L. Clissa, S. De Castro, F. Del Corso, L. Fabbri, M. Franchini, A. Gabrielli, B. Giacobbe, F. Lasagni Manghi, L. Massa, M. Negrini, A. Polini, L. Rinaldi, M. Romano, C. Sbarra, A. Sbrizzi, N. Semprini-Cesari, A. Sidoti, M. Sioli, K. Todome, S. Valentinetti, M. Villa & A. Zoccoli
Physikalisches Institut, Universität Bonn, Bonn, Germany
A. Bandyopadhyay, S. Bansal, P. Bauer, P. Bechtle, F. Beisiegel, F. U. Bernlochner, I. Brock, K. Desch, C. Deutsch, F. G. Diaz Capriles, C. Dimitriadi, J. Dingfelder, P. J. Falke, C. Grefe, S. Gurbuz, M. Hamer, L. M. Herrmann, F. Hinterkeuser, T. Holm, M. Huebner, F. Huegging, C. Kirfel, O. Kivernyk, P. T. Koenig, H. Krüger, K. Lantzsch, T. Lenz, C. Nass, D. Pohl, M. Standke, C. Vergis, E. Von Toerne & N. Wermes
Department of Physics, Boston University, Boston, MA, USA
J. M. Butler & Z. Yan
Department of Physics, Brandeis University, Waltham, MA, USA
S. V. Addepalli, J. R. Bensinger, P. Bhattarai, C. Blocker, D. Camarero Munoz, F. Capocasa, E. R. Duden, G. Frattari, M. Goblirsch-Kolb, Z. M. Schillaci, G. Sciolla, D. A. Trischuk & D. T. Zenger Jr
Transilvania University of Brasov, Brasov, Romania
S. Popa
Horia Hulubei National Institute of Physics and Nuclear Engineering, Bucharest, Romania
C. Alexa, A. Chitan, D. A. Ciubotaru, I.-M. Dinu, O. A. Ducu, A. E. Dumitriu, A. A. Geanta, A. Jinaru, V. S. Martoiu, J. Maurer, A. Olariu, D. Pietreanu, M. Renda, M. Rotaru, G. Stoicea, G. Tarna, I. S. Trandafir, A. Tudorache, V. Tudorache, M. E. Vasile & S. Younas
Department of Physics, Alexandru Ioan Cuza University of Iasi, Iasi, Romania
C. Agheorghiesei & P. Postolache
National Institute for Research and Development of Isotopic and Molecular Technologies, Physics Department, Cluj-Napoca, Romania
G. A. Popeneciu
University Politehnica Bucharest, Bucharest, Romania
A. A. Geanta & R. Hobincu
West University in Timisoara, Timisoara, Romania
P. M. Gravila
Faculty of Mathematics, Physics and Informatics, Comenius University, Bratislava, Slovak Republic
R. Astalos, D. Babal, P. Bartos, M. Dubovsky, B. Eckerova, S. Hyrych, L. Keszeghova, I. Sykora, S. Tokár & T. Ženiš
Department of Subnuclear Physics, Institute of Experimental Physics of the Slovak Academy of Sciences, Kosice, Slovak Republic
D. Bruncko, F. Sopkova, P. Strizenec & J. Urban
Physics Department, Brookhaven National Laboratory, Upton, NY, USA
S. H. Abidi, K. Assamagan, G. Barone, M. Begel, D. P. Benjamin, M. Benoit, R. Bi, D. Boye, E. Brost, V. Cavaliere, H. Chen, G. D’amen, S. J. Das, J. Elmsheuser, B. Garcia, V. Garonne, Y. Go, G. Iakovidis, C. W. Kalderon, A. Klimentov, E. Lançon, D. Lynn, H. Ma, T. Maeno, C. Mc Ginn, C. Mwewa, J. L. Nagle, P. Nilsson, M. A. Nomura, D. Oliveira Damazio, J. Ouellette, D. V. Perepelitsa, M. -A. Pleier, V. Polychronakos, S. Protopopescu, S. Rajagopalan, G. Redlinger, T. T. Rinn, J. Roloff, S. Snyder, P. Steinberg, S. A. Stucci, A. Tricoli, E. N. Umaka, A. Undrus, C. Weber, T. Wenaus & S. Ye
Universidad de Buenos Aires, Facultad de Ciencias Exactas y Naturales, Departamento de Física, y CONICET, Instituto de Física de Buenos Aires (IFIBA), Buenos Aires, Argentina
M. F. Daneri, G. Otero y Garzon, R. Piegaia & M. Toscani
California State University, CA, USA
K. Grimm, J. Moss & J. Veatch
Cavendish Laboratory, University of Cambridge, Cambridge, UK
W. K. Balunas, J. R. Batley, O. Brandt, J. T. P. Burr, J. D. Chapman, J. W. Cowley, W. J. Fawcett, L. Henkelmann, B. H. Hodkinson, L. B. A. H. Hommels, D. M. Jones, P. Jones, C. G. Lester, J. K. K. Liu, C. Malone, D. L. Noel, H. A. Pacey, M. A. Parker, C. J. Potter, D. Robinson, D. Rousso, R. Tombs & S. Williams
Department of Physics, University of Cape Town, Cape Town, South Africa
R. J. Atkin, K. N. Barends, J. M. Keaveney & S. Yacoob
Department of Mechanical Engineering Science, University of Johannesburg, Johannesburg, South Africa
M. Bhamjee, M. P. Connell, S. H. Connell, N. Govender, L. L. Leeuw & L. Truong
National Institute of Physics, University of the Philippines Diliman (Philippines), Quezon City, Philippines
M. Flores
School of Physics, University of the Witwatersrand, Johannesburg, South Africa
F. Carrio Argos, T. Chowdhury, L. D. Christopher, S. Dahbi, M. G. D. Gololo, D. Kar, M. Kumar, R. P. Mckenzie, B. R. Mellado Garcia, G. Mokgatitswane, O. Mtintsilana, E. K. Nkadimeng, N. P. Rapheeha, X. Ruan, E. M. Shrif, E. Sideras Haddad, S. Sinha & S. H. Tlou
Department of Physics, Carleton University, Ottawa, ON, Canada
A. Bachiu, A. Bellerive, B. Davis-Purcell, D. Gillberg, K. Graham, J. Heilman, C. E. Jessiman, S. Kaur, J. S. Keller, C. Klein, T. Koffas, L. S. Miller, M. Naseri, B. J. Norman, F. G. Oakham, D. A. Pizzi, E. J. Staats, M. G. Vincter & N. Zakharchuk
Faculté des Sciences Ain Chock, Réseau Universitaire de Physique des Hautes Energies-Université Hassan II, Casablanca, Morocco
B. Aitbenchikh, D. Benchekroun, F. Bendebba, K. Bouaouda, Z. Chadi, A. El Moussaouy, S. Ezzarqtouni, H. Imam & S. Zerradi
Faculté des Sciences, Université Ibn-Tofail, Kénitra, Morocco
Y. El Ghazali & M. Gouighri
LPMR, Faculté des Sciences, Université Mohamed Premier, Oujda, Morocco
J. Assahsah, M. Ouchrif & S. Ridouani
Faculté des sciences, Université Mohammed V, Rabat, Morocco
A. Aboulhorma, M. Ait Tamlihat, S. Batlamous, R. Cherkaoui El Moursli, H. El Jarrari, F. Fassi, H. Hamdaoui, B. Ngair, Z. Soumaimi, Y. Tayalati & M. Zaazoua
CERN, Geneva, Switzerland
Y. Afik, A. Ahmad, M. Aleksa, C. Amelung, J. K. Anders, N. Aranzabal, A. J. Armbruster, G. Avolio, M.-S. Barisits, T. A. Beermann, C. Beirao Da Cruz E Silva, J. F. Beirer, L. Beresford, T. Bisanz, D. Bogavac, J. D. Bossio Sola, J. Boyd, V. M. M. Cairo, N. Calace, S. Camarda, T. Carli, A. Catinaccio, L. D. Corpe, A. Cueto, P. Czodrowski, V. Dao, A. Dell’Acqua, A. Di Girolamo, F. Dittus, A. Dudarev, M. Dührssen, N. Ellis, M. Elsing, L. F. Falda Ulhoa Coelho, S. Falke, D. Francis, D. Froidevaux, P. Gessinger-Befurt, F. Giuli, L. Goossens, B. Gorini, C. A. Gottardo, S. Guindon, G. Gustavino, R. J. Hawkings, C. Helsens, A. M. Henriques Correia, L. Hervas, A. Hoecker, M. Huhtinen, J. J. Junggeburth, M. Kiehn, P. Klimek, T. Klioutchnikova, A. Koulouris, A. Krasznahorkay, S. Kuehn, F. Lanni, M. Lassnig, M. LeBlanc, G. Lehmann Miotto, S. Manzoni, A. Marzin, M. Mentink, A. Milic, M. Mlynarikova, A. K. Morley, L. Morvaj, P. Moschovakos, B. Moser, A. M. Nairz, M. Nessi, N. Nikiforou, S. Palestini, T. Pauly, O. Penc, H. Pernegger, S. Perrella, B. A. Petersen, N. E. Pettersson, L. Pezzotti, L. Pontecorvo, M. E. Pozo Astigarraga, M. Raymond, C. Rembser, S. Rettie, P. Riedler, S. Roe, A. Rummler, D. Salamani, A. Salzburger, S. Schlenker, J. Schovancova, A. Sharma, M. V. Silva Oliveira, R. Simoniello, I. Siral, J. Smiesko, C. A. Solans Sanchez, P. Sommer, G. Spigo, G. A. Stewart, M. C. Stockton, A. N. Tuna, G. Unal, T. Vafeiadis, M. Van Rijnbach, W. Vandelli, T. Vazquez Schroeder, C. Vittori, B. Vormwald, R. Vuillermet, T. Wengler, H. G. Wilkens & L. Zwalinski
Affiliated with an institute covered by a cooperation agreement with CERN, Geneva, Switzerland
A. V. Akimov, M. Aliev, A. V. Anisenkov, E. M. Baldin, S. Barsov, K. Beloborodov, K. Belotskiy, N. L. Belyaev, V. S. Bobrovnikov, A. G. Bogdanchikov, O. Bulekov, A. R. Buzykaev, S. P. Denisov, F. Dubinin, A. Ezhilov, R. M. Fakhrutdinov, O. L. Fedin, G. Fedotov, A. B. Fenyuk, I. L. Gavrilenko, A. Gavrilyuk, L. K. Gladilin, D. Golubkov, P. A. Gorbounov, V. Gratchev, S. Harkusha, A. N. Karyukhin, V. F. Kazanin, A. G. Kharlamov, T. Kharlamova, N. Korotkova, A. S. Kozhin, V. A. Kramarenko, O. Kuchinskaia, Y. Kulchitsky, A. Kupich, Y. A. Kurochkin, A. Kurova, M. Levchenko, V. P. Maleev, A. L. Maslennikov, D. A. Maximov, O. Meshkov, A. A. Minaenko, A. G. Myagkov, I. Naryshkin, P. Y. Nechaeva, V. Nikolaenko, S. V. Peleganchuk, M. Penzin, A. Petukhov, D. Pudzha, D. Pyatiizbyantseva, E. Ramakoti, O. L. Rezanova, A. Romaniouk, A. Ryzhov, V. A. Schegelsky, P. B. Shatalov, S. Yu. Sivoklokov, S. Yu. Smirnov, Y. Smirnov, L. N. Smirnova, A. A. Snesarev, E. Yu. Soldatov, A. A. Solodkov, V. Solovyev, E. A. Starchenko, V. V. Sulin, L. Sultanaliyeva, A. A. Talyshev, V. Tikhomirov, Yu. A. Tikhonov, S. Timoshenko, P. V. Tsiareshka, I. I. Tsukerman, K. Vorobev, O. Zenin, K. Zhukov & V. Zhulanov
Affiliated with an international laboratory covered by a cooperation agreement with CERN, Geneva, Switzerland
F. Ahmadov, I. N. Aleksandrov, V. A. Bednyakov, I. R. Boyko, I. A. Budagov, G. A. Chelkov, A. Cheplakov, M. V. Chizhov, D. V. Dedovich, M. Demichev, A. Gongadze, M. I. Gostkin, S. N. Karpov, Z. M. Karpova, U. Kruchonak, V. Kukhtin, E. Ladygin, V. Lyubushkin, T. Lyubushkina, S. Malyukov, M. Mineev, E. Plotnikova, I. N. Potrap, N. A. Rusakovich, M. Shiyakova, A. Soloshenko, S. Turchikhin, T. Turtuvshin, I. Yeletskikh, A. Zhemchugov & N. I. Zimine
Enrico Fermi Institute, University of Chicago, Chicago, IL, USA
R. W. Gardner, M. D. Hank, Y. K. Kim, D. W. Miller, J. T. Offermann, M. J. Oreglia, J. L. Rainbolt, B. J. Rosser, D. Schaefer, M. J. Shochet, E. A. Smith, C. Tosciri & I. Vukotic
LPC, Université Clermont Auvergne, CNRS/IN2P3, Clermont-Ferrand, France
D. Boumediene, A. M. Burger, D. Calvet, S. Calvet, J. Donini, R. Madar, T. Megy, O. Perrin, C. Santoni, O. V. Solovyanov, A. Tnourji, L. Vaslin & F. Vazeille
Nevis Laboratory, Columbia University, Irvington, NY, USA
K. Al Khoury, A. Angerami, G. Brooijmans, E. L. Busch, B. Cole, A. Emerman, B. J. Gilbert, J. L. Gonski, D. A. Hangal, Q. Hu, A. Kahn, K. E. Kennedy, D. J. Mahon, S. Mohapatra, J. A. Parsons, B. D. Seidlitz, A. C. Smith, P. M. Tuts, D. M. Williams, P. Yin & W. Zou
Niels Bohr Institute, University of Copenhagen, Copenhagen, Denmark
A. Camplani, M. Dam, J. B. Hansen, J. D. Hansen, P. H. Hansen, T. C. Petersen, C. Wiglesworth & S. Xella
Dipartimento di Fisica, Università della Calabria, Rende, Italy
E. Bisceglie, M. Capua, G. Crosetti, F. Curcio, D. Malito, A. Mastroberardino, E. Meoni, D. Salvatore, M. Schioppa & E. Tassi
INFN Gruppo Collegato di Cosenza, Laboratori Nazionali di Frascati, Frascati, Italy
E. Bisceglie, M. Capua, G. Crosetti, F. Curcio, I. Gnesi, D. Malito, A. Mastroberardino, E. Meoni, D. Salvatore, M. Schioppa & E. Tassi
Physics Department, Southern Methodist University, Dallas, TX, USA
A. M. Deiana, K. J. C. Leney, C. D. Milke, R. Narayan, S. Parajuli, A. C. Schaffer, S. J. Sekula, R. Stroynowski, Y. Yang & J. Ye
Physics Department, University of Texas at Dallas, Richardson, TX, USA
J. M. Izen, B. Meirose & K. Reeves
National Centre for Scientific Research “Demokritos”, Agia Paraskevi, Greece
G. Fanourakis, T. Geralis, M. M. Prapa, G. Stavropoulos & O. Zormpa
Department of Physics, Stockholm University, Stockholm, Sweden
S. Y. Andrean, F. Backman, L. Barranco Navarro, C. Bohm, C. Clement, K. Dunne, S. Hellman, T. Ingebretsen Carlson, D. W. Kim, S. Lee, X. Lou, D. A. Milstead, T. Moa, P. Pasuwan, L. Pereira Sanchez, S. Richter, S. B. Silverstein, J. Sjölin, S. Strandberg, A. Strubig & E. Valdes Santurio
Oskar Klein Centre, Stockholm, Sweden
S. Y. Andrean, F. Backman, L. Barranco Navarro, C. Clement, K. Dunne, S. Hellman, T. Ingebretsen Carlson, D. W. Kim, S. Lee, X. Lou, D. A. Milstead, T. Moa, P. Pasuwan, L. Pereira Sanchez, S. Richter, J. Sjölin, S. Strandberg, A. Strubig & E. Valdes Santurio
Deutsches Elektronen-Synchrotron DESY, Hamburg and Zeuthen, Germany
X. Ai, L. Aperio Bella, J.-H. Arling, A. Basalaev, J. K. Behr, I. Bloch, P. Bokan, F. Braren, K. Brendlinger, B. Brüers, E. Cheremushkina, J. M. Clavijo Columbie, J. Clercx, N. De Biase, S. Díez Cornell, L. Ferencz, J. Ferrando, P. Gadow, G. Gaycken, N. E. K. Gillwald, V. Goumarre, I. M. Gregor, A. Guida, R. Gupta, M. Habedank, S. Heim, L. Helary, J. Hofer, A. Hrynevich, C. Issever, R. M. Jacobs, J. Katzy, D. Kuechler, J. T. Kuechler, T. Kuhl, C. E. Leitgeb, M. Liberatore, A. Linss, E. M. Lobodzinska, A. Lopez Solis, O. Majersky, T. C. Mclachlan, F. Meloni, P. Moder, K. Mönig, F. Nechansky, J. Neundorf, Y. W. Y. Ng, I. Ninca, T. Novak, M. L. Ojeda, P. Pani, K. Peters, T. Poulsen, K. Ran, A. Renardi, F. Renner, M. Rimoldi, P. Rivadeneira, M. Robin, L. Rossini, C. O. Sander, S. Schmitt, C. Seitz, S. Sharma, S. Sinha, D. South, M. M. Stanitzki, B. Stapf, L. R. Strom, N. A. Styles, K. Tackmann, E. A. Thompson, J. Von Ahnen, C. J. Wells, A. F. Wongel, S. D. Worm & Y. C. Yap
Fakultät Physik, Technische Universität Dortmund, Dortmund, Germany
M. Baselga, C. D. Burgard, T. Dado, C. M. Delitzsch, S. Dungs, J. Erdmann, B. Gocke, K. Kroeninger, T. Kupfer, O. Nackenhorst, K. Sedlaczek, J. Weingarten, B. Wendland & S. V. Zeißner
Institut für Kern- und Teilchenphysik, Technische Universität Dresden, Dresden, Germany
A. Berthold, N. Fritzsche, T. Herrmann, D. Kirchmeier, T. Kresse, W. F. Mader, M. Maerker, J. Manjarres Ramos, A. Nag, J.-E. Nitschke, O. Novgorodova, F. Siegert, M. V. Stange, A. Straessner, S. Todt, H. Torres & C. Wiel
Department of Physics, Duke University, Durham, NC, USA
A. T. H. Arce, J. B. Beacham, D. R. Davis, M. G. Eggleston, A. T. Goshaw, A. Kotwal, M. C. Kruse, K. Pachal, S. Sen, Z. Wang & P. Zhao
SUPA-School of Physics and Astronomy, University of Edinburgh, Edinburgh, UK
S. Alderweireldt, T. M. Carter, P. J. Clark, S. M. Farrington, Y. Gao, R. Y. González Andana, G. N. Hamity, A. Hasib, M. P. Heath, S. Jiggins, C. Leonidopoulos, V. J. Martin, L. Mijović, V. A. Parrish, E. A. Pender, E. P. Takeva, N. Themistokleous, E. M. Villhauer, A. Vishwakarma, B. M. Wynne & E. Zaid
INFN e Laboratori Nazionali di Frascati, Frascati, Italy
P. Albicocco, M. Antonelli, C. Arcangeletti, M. Beretta, V. Chiarella, G. Maccarrone, G. Mancini, A. Sansoni, M. Testa & E. Vilucchi
Physikalisches Institut, Albert-Ludwigs-Universität Freiburg, Freiburg, Germany
S. Argyropoulos, F. Becherer, M. Boehler, L. Diehl, A. Froch, S. S. Gurdasani, C. Heidegger, K. K. Heidegger, G. Herten, D. Hohn, J. C. Honig, P. Jain, K. Jakobs, P. Jenni, E. Karentzos, A. Knue, K. Köneke, R. Kuesters, O. Kuprash, U. Landgraf, V. S. Lang, T. Moskalets, Ö. O. Öncel, U. Parzefall, V. Plesanovs, J. Pretel, D. Rafanoharana, A. Rodriguez Rodriguez, B. Roland, B. Rottler, F. Rühr, Z. Rurikova, D. Sammel, F. Sauerburger, K. E. Schleicher, P. G. Scholer, M. Schumacher, S. Solomon, K. Solovieva, D. Sperlich, C. Weiser, L. A. M. Wiik-Fuchs, B. T. Winter, C. J. S. Young & D. Zanzi
II. Physikalisches Institut, Georg-August-Universität Göttingen, Göttingen, Germany
K. Abeling, W. Alkakhi, J. F. Beirer, M. Bindi, S. Eggebrecht, L. O. Gerlach, R. Goncalves Gama, J. Grosse-Knetter, G. Kawamura, A. Kirchhoff, S. Korn, S. Lai, A. H. Melo, S. Mobius, M. Niemeyer, I. Pokharel, A. Quadt, B. Ravina, C. Scheulen, E. Shabalina, S. Sindhu, A. Skaf, Y. Tian & H. Ye
Département de Physique Nucléaire et Corpusculaire, Université de Genève, Genève, Switzerland
S. Adorni, C. Antel, K. Axiotis, A. Clark, D. Della Volpe, M. Drozdova, L. F. Ehrke, D. Ferrere, S. Franchellucci, T. Golling, S. Gonzalez-Sevilla, M. Guth, D. Harada, G. Iacobucci, T. Iizawa, S. B. Klein, M. Leigh, C. Moreno Martinez, H. R. Nindhito, L. Paolozzi, G. Quetant, J. A. Raine, C. Rizzi, J. A. Sabater Iglesias, S. Schramm, D. Sengupta, A. Sfyrla, O. Theiner, X. Wu, S. Zambito & K. Zoch
Dipartimento di Fisica, Università di Genova, Genoa, Italy
D. Barberis, F. A. Di Bello, G. Gagliardi, A. Lapertosa, F. Parodi, M. Ressegotti, C. Schiavi, F. Sforza, M. Tanasini & L. Vannoli
INFN Sezione di Genova, Genoa, Italy
D. Barberis, A. Coccaro, G. Darbo, F. A. Di Bello, G. Gagliardi, C. Gemme, A. Lapertosa, P. Morettini, F. Parodi, S. Passaggio, M. Ressegotti, L. P. Rossi, C. Schiavi, F. Sforza, M. Tanasini & L. Vannoli
II. Physikalisches Institut, Justus-Liebig-Universität Giessen, Giessen, Germany
D. Caforio, M. Düren & H. Stenzel
SUPA-School of Physics and Astronomy, University of Glasgow, Glasgow, UK
R. L. Bates, A. Blue, A. G. Borbély, D. Britton, A. G. Buckley, P. J. Bussey, C. M. Buttar, G. Callea, I. A. Connelly, W. R. Cunningham, A. T. Doyle, F. Fabbri, J. Howarth, J. Jamieson, L. Mince, V. O’Shea, M. Owen, A. G. Rennie, A. Robson, E. L. Simpson, D. P. Spiteri, N. Warrack, H. Watson & K. Wraight
LPSC, Université Grenoble Alpes, CNRS/IN2P3, Grenoble INP, Grenoble, France
J. Collot, S. Crépé-Renaudin, J. B. De Vivie De Regie, P. A. Delsart, M. H. Genest, N. Lalloue, F. Ledroit-Guillon, A. Lucotte, F. Malek, A. P. Pereira Peixoto, S. Shirabe & B. Trocmé
Laboratory for Particle Physics and Cosmology, Harvard University, Cambridge, MA, USA
N. A. Asbah, A. Badea, A. W. Fortman, S. Francescato, M. Franklin, J. Huth, X. Jia, G. V. Kehris, M. Morii, G. Rabanal Bolanos, A. M. Wang, R. Wang & A. S. White
Department of Modern Physics and State Key Laboratory of Particle Detection and Electronics, University of Science and Technology of China, Hefei, China
A. Baroncelli, Y. Chen, M. J. Da Cunha Sargedas De Sousa, D. Du, Y. Fu, J. Gao, A. Giannini, K. Han, L. Han, F. He, Y. Huang, Y. Jiang, C. Li, H. Li, Q. Y. Li, J. B. Liu, M. Liu, M. Y. Liu, X. Liu, Y. W. Liu, R. Ospanov, H. Peng, S. Su, X. Su, T. Wang, C. Wei, Y. Wu, Z. Wu, M. Xie, X. Xie, H. Xu, H. Xu, L. Xu, H. T. Yang, S. Yang, X. Yang, Y. Yang, Z. Yang, X. Ye, Y. Yu, Z. Zhao, X. Zheng, H. L. Zhu & Y. Zhu
Institute of Frontier and Interdisciplinary Science and Key Laboratory of Particle Physics and Particle Irradiation (MOE), Shandong University, Qingdao, China
H. Atmani, C. Feng, J. Han, C. Jia, B. Li, H. Li, H. Li, T. Li, Z. Li, L. L. Ma, K. Tariq, S. Wang, Z. Xu, R. Yuan, J. Zhang, X. Zhang, T. Zhao & C. G. Zhu
School of Physics and Astronomy, Shanghai Jiao Tong University, Key Laboratory for Particle Astrophysics and Cosmology (MOE), SKLPPC, Shanghai, China
J. Chen, X. Chen, J. Guo, J. Hong, C.-Q. Li, J. Li, L. Li, S. Li, D. Liu, K. Liu, Q. Liu, D. Sampsonidou, Q. Shen, W. Su, J. Tang, C. Wang, X. Wang, Z. Wang, J. Yan, H. J. Yang, X. Zhang, Y. Zhang, N. Zhou & Y. Zhu
Tsung-Dao Lee Institute, Shanghai, China
N. Brahimi, C. Kato, S. Li, D. Liu, K. Liu, Q. Liu, D. Sampsonidou, W. Su, Y. Wang, Z. Wang & H. J. Yang
Kirchhoff-Institut für Physik, Ruprecht-Karls-Universität Heidelberg, Heidelberg, Germany
L. M. Baltes, F. Bartels, F. L. Castillo, F. Del Rio, M. Dunford, S. Franchino, T. Junkermann, M. Klassen, T. Mkrtchyan, P. S. Ott, D. F. Rassloff, S. Rodriguez Bosca, H.-C. Schultz-Coulon, V. Sothilingam, R. Stamen, P. Starovoitov, S. M. Weber, M. Wessels & X. Yue
Physikalisches Institut, Ruprecht-Karls-Universität Heidelberg, Heidelberg, Germany
M. M. Czurylo, S. J. Dittmeier, C. Sauer, A. Schoening, L. Vigani & J. Zinsser
Department of Physics, Chinese University of Hong Kong, Shatin, N.T., Hong Kong, China
H. C. Cheng, K. L. Chu, M. C. Chu, L. R. Flores Castillo, J. M. Iturbe Ponce, K. W. Kwok, T. Pan, J. Wang & M. Wu
Department of Physics, University of Hong Kong, Hong Kong, China
S. Huang, D. Paredes Hernandez, C. Peng, K. C. Tam & Y. Tu
Department of Physics and Institute for Advanced Study, Hong Kong University of Science and Technology, Clear Water Bay, Kowloon, Hong Kong, China
K. Lie, K. Prokofiev, J. Xiang & T. Yang
Department of Physics, National Tsing Hua University, Hsinchu, Taiwan
K. Cheung, P. J. Hsu & Y. J. Lu
IJCLab, Université Paris-Saclay, CNRS/IN2P3, 91405, Orsay, France
C. Allaire, A. Bassalat, L. Duflot, M. Escalier, L. Fayard, D. Fournier, J. -F. Grivaz, L. Guo, L. Iconomidou-Fayard, S. Keshri, Y. A. R. Khwaira, A. Lounis, O. Lukianchuk, N. Makovec, N. Morange, P. Puzo, D. Rousseau, A. C. Schaffer, L. Serin, S. Simion, X. Su, J. S. Tafoya Vargas, R. Tanaka, D. Varouchas, D. Zerwas & Z. Zhang
Centro Nacional de Microelectrónica (IMB-CNM-CSIC), Barcelona, Spain
I. Lopez Paz
Department of Physics, Indiana University, Bloomington, IN, USA
P. Calfayan, H. Evans, B. C. Forland, R. Kopeliansky, S. Lammers, H. Lien, R. A. Linck, F. Luehring, C. Meyer, G. Myers, G. Palacino, C. P. A. Roland, S. Sottocornola & O. Toldaiev
INFN Gruppo Collegato di Udine, Sezione di Trieste, Udine, Italy
B. S. Acharya, M. Cobal, M. Faraj, M. P. Giordani, G. Giugliarelli, G. Guerrieri, G. Panizzo, M. Pinamonti & L. Serkin
ICTP, Trieste, Italy
B. S. Acharya, M. Faraj, G. Guerrieri & L. Serkin
Dipartimento Politecnico di Ingegneria e Architettura, Università di Udine, Udine, Italy
M. Cobal, M. P. Giordani, G. Giugliarelli, G. Panizzo & M. Pinamonti
INFN Sezione di Lecce, Lecce, Italy
M. S. Centonze, G. Chiodini, E. Gorini, F. G. Gravili, M. Greco, L. Longo, A. Palazzo, M. Primavera, E. J. Schioppa, S. Spagnolo & A. Ventura
Dipartimento di Matematica e Fisica, Università del Salento, Lecce, Italy
M. S. Centonze, E. Gorini, F. G. Gravili, M. Greco, L. Longo, A. Palazzo, E. J. Schioppa, S. Spagnolo & A. Ventura
INFN Sezione di Milano, Milan, Italy
G. Alimonti, A. Andreazza, E. Ballabene, A. Carbone, L. Carminati, S. Carrá, M. Citterio, S. Coelli, A. E. C. Coimbra, S. D’Auria, L. Dell’Asta, M. Fanti, D. Giugni, T. Lari, M. Lazzaroni, C. Marcon, C. Meroni, A. Murrone, L. Perini, F. Piazza, F. Ragusa, S. Resconi, A. Stabile, G. F. Tartarelli, C. Troncon & R. Turra
Dipartimento di Fisica, Università di Milano, Milan, Italy
A. Andreazza, E. Ballabene, A. Carbone, L. Carminati, S. Carrá, A. E. C. Coimbra, S. D’Auria, L. Dell’Asta, M. Fanti, M. Lazzaroni, C. Marcon, A. Murrone, L. Perini, F. Piazza, F. Ragusa & A. Stabile
INFN Sezione di Napoli, Naples, Italy
A. Aloisio, M. G. Alviggi, S. Auricchio, M. T. Camerlingo, V. Canale, G. Carlino, F. Cirotto, F. Conventi, R. De Asmundis, M. Della Pietra, C. Di Donato, A. Doria, P. Iengo, V. Izzo, P. Massarotti, L. Merola, E. Rossi & G. Sekhniaidze
Dipartimento di Fisica, Università di Napoli, Naples, Italy
A. Aloisio, M. G. Alviggi, S. Auricchio, M. T. Camerlingo, V. Canale, F. Cirotto, M. Della Pietra, C. Di Donato, P. Iengo, P. Massarotti, L. Merola & E. Rossi
INFN Sezione di Pavia, Pavia, Italy
J. Agarwala, R. Ferrari, G. Gaudio, G. Introzzi, A. Kourkoumeli-Charalampidi, A. Lanza, M. Livan, G. Manco, A. Negri, G. Polesello, D. M. Rebuzzi, A. Rimoldi, E. Romano & G. Rovelli
Dipartimento di Fisica, Università di Pavia, Pavia, Italy
J. Agarwala, G. Introzzi, A. Kourkoumeli-Charalampidi, M. Livan, G. Manco, A. Negri, D. M. Rebuzzi, A. Rimoldi, E. Romano & G. Rovelli
INFN Sezione di Pisa, Pisa, Italy
A. Annovi, M. Calvetti, V. Cavasinni, G. Chiarelli, P. Francavilla, P. Giannetti, S. Leone, P. Mastrandrea, C. Roda, F. Scuri & M. Verducci
Dipartimento di Fisica E. Fermi, Università di Pisa, Pisa, Italy
M. Calvetti, V. Cavasinni, P. Francavilla, P. Mastrandrea, C. Roda & M. Verducci
INFN Sezione di Roma, Rome, Italy
F. Anulli, G. Artoni, P. Bagnaia, M. Bauce, A. Betti, C. Bini, N. Bruscino, M. Carnesale, A. R. Chomont, M. Corradi, A. De Salvo, A. Di Domenico, S. Falciano, P. Gauzzi, S. Gentile, S. Giagu, V. Ippolito, M. Kado, F. Lacava, C. Luci, L. Martinelli, F. Morodei, A. Nisati, G. Padovano, E. Pasqualucci, E. Pompa Pacchi, S. Rosati, L. Sabetta, F. Safai Tehrani, L. Santi, R. Vari & S. Veneziano
Dipartimento di Fisica, Sapienza Università di Roma, Rome, Italy
G. Artoni, P. Bagnaia, M. Bauce, A. Betti, C. Bini, N. Bruscino, M. Carnesale, A. R. Chomont, M. Corradi, A. Di Domenico, P. Gauzzi, S. Gentile, S. Giagu, V. Ippolito, M. Kado, F. Lacava, C. Luci, L. Martinelli, F. Morodei, G. Padovano, E. Pompa Pacchi, L. Sabetta & L. Santi
INFN Sezione di Roma Tor Vergata, Rome, Italy
G. Aielli, P. Camarri, R. Cardarelli, L. Cerrito, U. De Sanctis, A. Di Ciaccio, M. Faucci Giannelli, B. Liberti, S. Loffredo, L. Pizzimento, G. Proto, A. Rocchi & M. Vanadia
Dipartimento di Fisica, Università di Roma Tor Vergata, Rome, Italy
G. Aielli, P. Camarri, L. Cerrito, U. De Sanctis, A. Di Ciaccio, M. Faucci Giannelli, S. Loffredo, L. Pizzimento, G. Proto, A. Rocchi & M. Vanadia
INFN Sezione di Roma Tre, Rome, Italy
I. Bashta, M. Biglietti, B. Di Micco, R. Di Nardo, A. D’Onofrio, A. Farilla, M. Iodice, D. Orestano, G. Salamanna & M. Sessa
Dipartimento di Matematica e Fisica, Università Roma Tre, Rome, Italy
I. Bashta, B. Di Micco, R. Di Nardo, A. D’Onofrio, D. Orestano, G. Salamanna & M. Sessa
INFN-TIFPA, Trento, Italy
M. Cristoforetti, A. Di Luca, F. M. Follega, R. Iuppa, D. Mascione, E. Ricci & D. M. S. Sultan
Università degli Studi di Trento, Trento, Italy
M. Cristoforetti, A. Di Luca, F. M. Follega, R. Iuppa, D. Mascione, E. Ricci & D. M. S. Sultan
Universität Innsbruck, Department of Astro and Particle Physics, Innsbruck, Austria
E. Kneringer & A. Thaler
University of Iowa, Iowa City, IA, USA
M. Cano Bret, D. Garg, M. Lu, U. Mallik, P. Sharma & W. T. Wang
Department of Physics and Astronomy, Iowa State University, Ames, IA, USA
W. D. Heidorn, N. Krumnack & A. Lebedev
Departamento de Engenharia Elétrica, Universidade Federal de Juiz de Fora (UFJF), Juiz de Fora, Brazil
V. Araujo Ferraz, A. S. Cerqueira, L. Manhaes de Andrade Filho & D. Oliveira Goncalves
Universidade Federal do Rio De Janeiro COPPE/EE/IF, Rio de Janeiro, Brazil
Y. Amaral Coutinho, L. P. Caloba, J. V. Da Fonseca Pinto, W. S. Freund, P. Gaspar, J. Lieber Marin, N. M. J. Nunes De Moura Junior, J. M. Seixas & M. Verissimo De Araujo
Instituto de Física, Universidade de São Paulo, São Paulo, Brazil
M. Donadelli & M. A. L. Leite
Rio de Janeiro State University, Rio de Janeiro, Brazil
M. Begalli & B. S. Peralva
KEK, High Energy Accelerator Research Organization, Tsukuba, Japan
M. Aoki, K. Hanagaki, Y. Ikegami, A. Mizukami, J. Montejo Berlingen, K. Nagano, Y. Nakahama, K. Nakamura, H. Oide, O. Sasaki, Y. Takubo, M. Togawa, K. Tokushuku, M. Tomoto & S. Tsuno
Graduate School of Science, Kobe University, Kobe, Japan
H. Hibi, H. Kurashige, J. Maeda, A. Ochi, K. Takeda & Y. Yamazaki
AGH University of Science and Technology, Faculty of Physics and Applied Computer Science, Kraków, Poland
L. Adamczyk, T. Bold, K. M. Ciesla, W. Dabrowski, M. Dyndal, A. K. Gilbert, I. Grabowska-Bold, K. W. Janas, S. Koperny, I. K. Lakomiec, K. Maj, B. Mindur, A. Ogrodnik, M. Przybycien & R. Sikora
Marian Smoluchowski Institute of Physics, Jagiellonian University, Kraków, Poland
D. T. Gil, E. Richter-Was & K. W. Topolnicki
Institute of Nuclear Physics Polish Academy of Sciences, Kraków, Poland
E. Banas, P. A. Bruckman de Renstrom, J. J. Chwastowski, D. Derendarz, B. S. Dziedzic, P. A. Erland, A. Kaczmarska, K. Korcyl, J. A. Krzysiak, M. P. Lewicki, Pa. Malecki, A. Olszewski, J. Olszowska, P. Patel, M. Slawinska, A. Smykiewicz, E. Stanecka, R. Staszewski, M. Trzebinski, A. Trzupek, M. W. Wolter, B. K. Wosiek, K. W. Woźniak & B. Zabinski
Faculty of Science, Kyoto University, Kyoto, Japan
R. Kobayashi, Y. Mino, Y. Noguchi, Y. Okazaki, T. Sano, T. Sumida & Y. Tsujikawa
Kyoto University of Education, Kyoto, Japan
R. Takashima
Research Center for Advanced Particle Physics and Department of Physics, Kyushu University, Fukuoka, Japan
K. Kawagoe, D. Kobayashi, Y. Miyazaki, H. Otono, J. Tojo & N. Yamaguchi
Instituto de Física La Plata, Universidad Nacional de La Plata and CONICET, La Plata, Argentina
F. Alonso, M. T. Dova, F. Monticelli, S. J. Noacco Rosende, G. E. Orellana, F. Sili & H. Wahlberg
Physics Department, Lancaster University, Lancaster, UK
A. E. Barton, I. A. Bertram, G. Borissov, E. V. Bouhova-Thacker, R. A. M. Ferguson, H. Fox, R. C. W. Henderson, R. W. L. Jones, V. Kartvelishvili, P. A. Love, E. J. Marshall, L. Meng, D. Muenstermann, N. Ribaric, K. Rybacki, M. Smizanska, S. Spinali, A. M. Wharton & M. R. Yexley
Oliver Lodge Laboratory, University of Liverpool, Liverpool, UK
E. Arena, A. Biondini, S. Burdin, P. Dervan, M. D’Onofrio, R. Gonzalez Lopez, C. B. Gwilliam, H. S. Hayward, A. E. Jaspan, T. J. Jones, M. Klein, U. Klein, J. Kretzschmar, T. F. Lee, Z. Li, H. Lyons, C. M. Mcpartland, A. Mehta, M. W. O’Keefe, N. Rompotis, A. J. Ruby, C. D. Sebastiani, J. L. Smith, M. J. Sullivan, H. Teagle & J. H. Vossebeld
Department of Experimental Particle Physics, Jožef Stefan Institute and Department of Physics, University of Ljubljana, Ljubljana, Slovenia
V. Cindro, A. Filipčič, A. Gorišek, B. Hiti, A. S. Howard, B. P. Kerševan, G. Kramberger, B. Leban, I. Mandić, B. Maček, M. Mikuž & J. Novak
School of Physics and Astronomy, Queen Mary University of London, London, UK
A. J. Bevan, U. Blumenschein, M. Bona, T. P. Charman, I. Dawson, A. A. Elliot, A. C. Freegard, R. Gamboa Goni, K. Ghorbanian, J. M. Hays, N. B. Heatley, N. D. Hehir, M. P. J. Landon, S. L. Lloyd, J. P. Mandalia, P. S. Miyagawa, T. Qiu, E. Rizvi, E. J. Thorpe, L. Vozdecky & S. Zenz
Department of Physics, Royal Holloway University of London, Egham, UK
S. Ahuja, T. Berry, V. Boisvert, C. D. Booth, G. Cowan, S. George, S. M. Gibson, S. D. Lawlor, H. P. Lefebvre, J. G. Panduro Vazquez, F. Pastore, J. D. Shinner, F. Spanò, P. Teixeira-Dias, D. W. Thomas & P. J. Verschuuren
Department of Physics and Astronomy, University College London, London, UK
G. Barbour, L. S. Borgna, J. M. Butterworth, M. Campanelli, G. Facini, C. Gutschow, E. H. Haines, D. P. Huang, A. S. Kelly, N. Kimura, N. Konstantinidis, A. Korn, N. N. Lad, A. C. A. Lee, Y. Ma, A. C. Martyniuk, D. J. Mclaughlin, M. Mlinarevic, T. Mlinarevic, R. R. B. Norisam, E. Nurse, C. Pitman Donaldson, T. Scanlon, P. Sherwood, L. Shi, A. L. Sopio, A. Vaitkus, S. Van Stroud, B. M. Waugh, Y. Yeh & L. Yue
Louisiana Tech University, Ruston, LA, USA
Z. Farazpay, L. Sawyer & M. Wobisch
Fysiska institutionen, Lunds universitet, Lund, Sweden
T. P. A. Åkesson, E. E. Corrigan, C. Doglioni, P. A. Ekman, J. Geisen, V. Hedberg, H. Herde, G. Jarlskog, B. Konya, E. Lytken, J. U. Mjörnmark, R. Poettgen, N. D. Simpson, E. Skorda & O. Smirnova
Departamento de Física Teorica C-15 and CIAFF, Universidad Autónoma de Madrid, Madrid, Spain
M. Alvarez Estevez, F. Barreiro, J. Del Peso, C. Glasman, M. A. Principe Martin & J. Terron
Institut für Physik, Universität Mainz, Mainz, Germany
A. Aggarwal, M. Akbiyik, A. Alvarez Fernandez, J. Balz, A. Basan, J. Blumenthal, V. Büscher, J. Damp, F. Fiedler, R. Gugel, A. Hadef, C. Kahra, P. D. Kennedy, P. Kramer, J. A. Kremer, A. Laudrain, L. Masetti, F. Neuhaus, S. Rave, M. Robles Manzano, U. Schäfer, B. Schlag, K. Schmieden, C. Schmitt, M. Schott, D. Ta, S. Tapprogge, E. Tzovara, O. Vujinovic, C. Wang, R.-J. Wang & M. Weirich
School of Physics and Astronomy, University of Manchester, Manchester, UK
M. Aly, D. A. Baron Moreno, C. R. Basson, C. J. Birch-sykes, A. Bitadze, S. E. Clawson, C. Da Via, C. Doglioni, M. D’uffizi, S. Dysch, T. Fitschen, A. C. Forti, R. Hankache, T. G. Hitchings, B. P. Honan, Z. Huang, Z. Lawrence, B. Le, J. Masik, F. J. Munoz Sanchez, M. Murin, A. Oh, J. R. Pater, R. F. Y. Peters, A. D. Pilkington, D. Price, D. Qichen, Y. Qin, M. Queitsch-Maitland, S. M. Shaw, V. Vecchio, J. K. Winter & T. R. Wyatt
CPPM, Aix-Marseille Université, CNRS/IN2P3, Marseille, France
G. Aad, M. Barbero, T. P. Calvet, N. Chiedde, Y. Coadou, C. Diaconu, F. Djama, A. Duperrin, L. Feligioni, E. Fortin, G. D. Hallewell, N. Kumari, L. A. O. Laatu, E. Monnier, S. Muanza, E. Nagy, E. Petit, C. Rougier, A. Rozanov, J. Stark, T. Strebler, M. Talby, G. Tarna, S. Tisserant, L. Vacavant & A. Vallier
Department of Physics, University of Massachusetts, Amherst, MA, USA
D. C. Abbott, B. Brau, Y. Chou, R. Coelho Lopes De Sa, C. Dallapiccola, M. Javurkova, S. Krishnamurthy, A. K. Kvam, R. J. Langenberg, W. A. Leight, V. I. Martinez Outschoorn, E. J. W. Moyse, R. A. Rojas, J. A. Sandesara, P. Tornambe, M. J. Veen, M. Vessella, C. Wagner & S. Willocq
Department of Physics, McGill University, Montreal, QC, Canada
W. S. Ahmed, A. Ambler, A. Canesse, F. Corriveau, R. Hulsken, T. Kwan, X. Li, Z. Li, J. P. Mc Gowan, C. Nelson, S. H. Robertson, S. Saha, S. Stärz, B. Vachon & A. Warburton
School of Physics, University of Melbourne, Melbourne, VIC, Australia
E. L. Barberio, S. Goldfarb, E. F. McDonald, P. C. McNamara, T. Pham, F. Scutti, J. Shojaii, G. N. Taylor & P. Urquijo
Department of Physics, University of Michigan, Ann Arbor, MI, USA
D. Amidei, P. A. Atmasiddha, A. Chen, T. Dai, E. B. Diehl, C. Ferretti, P. Fleischmann, C. Grud, L. Guan, J. A. M. Guhit, Y. Guo, C. Hayes, M. H. Klein, N. G. Kyriacou, D. Levin, Y. L. Liu, S. P. Mc Kee, G. Merz, K. Nelson, J. Qian, T. A. Schwarz, L. R. Simpson, S. Sun, M. Tsai, Z. Wang, Z. Wang, X. Xiao, T. Xu, W. Xu, Z. Yang, M. Yuan, S. Zhang, B. Zhou & J. Zhu
Department of Physics and Astronomy, Michigan State University, East Lansing, MI, USA
C. J. Buxo Vazquez, H. De la Torre, B. Dong, T. Farooque, W. C. Fisher, J. P. Gombas, R. Hauser, D. Hayden, J. Huston, K. S. Krowpman, R. Les, K. Lin, M. Mazza, I. Pogrebnyak, J. G. Reyes Rivera, R. Schwienhorst & A. Tarek Abouelfadl Mohamed
Group of Particle Physics, University of Montreal, Montreal, QC, Canada
J.-F. Arguin, G. Azuelos, H. M. Borecka-Bielska, D. Godin, C. Leroy, K. Mochizuki, H. D. N. Nguyen, C. Papadatos, B. Pascual Dias & M. Usman
Fakultät für Physik, Ludwig-Maximilians-Universität München, Munich, Germany
C. G. Ames, Z. P. Arrubarrena Tame, O. Biebel, V. D’Amico, G. Duckeck, N. M. Hartmann, R. Hertenberger, C. S. Jagfeld, J. Lorenz, A. M. Lory, A. Mann, S. Mehlhase, P. Mogg, K. E. Penski, M. P. Rinnagel, D. Schaile, E. Schanet, C. Valderanis, F. Vogel & R. Walker
Max-Planck-Institut für Physik (Werner-Heisenberg-Institut), Munich, Germany
T. Barillari, S. Bethke, D. Britzger, D. Cieri, D. Duda, F. Guescini, S. Hadzic, L. Heinrich, M. Holzbock, J. Jimenez Pena, A. E. Kiryunin, F. Klimpel, S. Kluth, O. Kortner, S. Kortner, H. Kroha, S. R. Maschek, S. Menke, R. Nisius, M. B. Rendel, R. Richter, M. Sahinsoy, P. Schacht, M. Spalla, S. Stonjek, A. Verbytskyi, E. Voevodina, V. M. Walbrecht & N. S. Wenke
Graduate School of Science and Kobayashi-Maskawa Institute, Nagoya University, Nagoya, Japan
H. Asada, S. Hayashida, Y. Horii, M. Tomoto & M. Wakida
Department of Physics and Astronomy, University of New Mexico, Albuquerque, NM, USA
E. A. Narayanan, R. Novotny & S. C. Seidel
Institute for Mathematics, Astrophysics and Particle Physics, Radboud University/Nikhef, Nijmegen, The Netherlands
S. Caron, N. De Groot, P. Ferrari, F. Filthaut, L. Franco, M. C. Missio, P. Moskvitina, C. Nellist, A. Perrevoort, D. Ponomarenko & M. Wu
Nikhef National Institute for Subatomic Physics and University of Amsterdam, Amsterdam, The Netherlands
A. Alfonsi, H. Arnold, P. J. Bakker, R. Balasubramanian, S. Bentvelsen, G. J. Bobbink, L. Brenner, E. Cherepanova, E. Y. S. Chow, M. De Beurs, P. de Jong, J. Degens, F. A. Dias, T. A. du Pree, Z. Feng, P. Ferrari, G. Gilles, P. Kluit, B. Kortman, A. E. McDougall, C. E. Pandini, F. Pasquali, A. Pizzini, H. L. Snoek, J. M. Sonneveld, M. Stamenkovic, D. R. Van Arneman, I. Van Vulpen, W. Verkerke, J. C. Vermeulen, M. Vozak & M. Vreeswijk
Department of Physics, Northern Illinois University, DeKalb, IL, USA
J. Adelman, D. Chakraborty, L. D’Eramo, B. L. Dwyer, W. H. Kostecka, A. N. Lancaster & E. W. Parrish
University of Sharjah, Sharjah, United Arab Emirates
R. Soualah
Department of Physics, New York University, New York, NY, USA
Y. Abulaiti, K. Cranmer, A. Haas, A. I. Mincer & P. Rieck
Ochanomizu University, Otsuka, Bunkyo-ku, Tokyo, Japan
K. Asai, M. Fujimoto & T. Kono
Ohio State University, Columbus, OH, USA
A. Boveia, B. M. Cote, K. K. Gan, N. M. Harrison, R. Joshi, H. Kagan, M. Montella, Z. B. Pollock, B. Reynolds, R. Rosten & S. Shrestha
Homer L. Dodge Department of Physics and Astronomy, University of Oklahoma, Norman, OK, USA
B. Abbott, M. Alhroob, P. Gutierrez, J. E. Lambert, M. Marjanovic, J. M. Muse, A. R. Roepe-Gier, H. Severini, P. Skubic, M. Strauss, J. Stupak & D. J. Wilbern
Department of Physics, Oklahoma State University, Stillwater, OK, USA
E. Antipov, V. S. Bhopatkar, S. Goswami, J. Haley, A. Khanov, F. Rizatdinova & E. R. Vandewall
Palacký University, Joint Laboratory of Optics, Olomouc, Czech Republic
P. Baron, K. Cerny, M. Hrabovsky, T. Komarek, J. Kvita, L. Nozka, J. Pacalt & R. Privara
Institute for Fundamental Science, University of Oregon, Eugene, OR, USA
R. Bielski, J. E. Brau, D. E. Fellers, G. R. Gledhill, M. Glisic, G. Gonella, J. J. Heinrich, L. Jeanty, A. Kilgallon, N. A. Luongo, S. Majewski, A. L. Steinhebel, D. M. Strom, E. Torrence, K. Whalen & F. Winklmeier
Graduate School of Science, Osaka University, Osaka, Japan
M. Hirose, H. Nanjo & L. Wickremasinghe
Department of Physics, University of Oslo, Oslo, Norway
V. Ananiev, K. Bjørke, M. K. Bugge, D. Cameron, J. R. Catmore, E. Gramstad, E. S. Haaland, A. L. Heggelund, S. Hellesund, F. Ould-Saada, M. Pedersen, A. L. Read, O. Røhne, E. B. Rye, H. Sandaker, D. R. Shope, K. O. H. Vadla & M. Van Rijnbach
Department of Physics, Oxford University, Oxford, UK
A. J. Barr, D. Bortoletto, T. L. Bruckler, F. Celli, E. I. Conroy, A. M. Cooper-Sarkar, M. A. Draguet, J. A. Frost, G. E. Gallardo, E. J. Gallas, J. C. Grundy, C. Gwenlan, Y. T. Harris, C. P. Hays, T. B. Huffman, K. Karava, Z. Li, C. Merlassino, M. Mironova, K. Nagai, L. Nedic, R. B. Nickerson, K. Potamianos, E. Schopf, I. P. J. Shipsey, H. A. Smith, M. Stankaityte, I. Veliscek, G. H. A. Viehhauser, Y. Wei, A. R. Weidberg, P. J. Windischhofer, R. Wölker, J. Wuerzinger & S. Yan
LPNHE, Sorbonne Université, Université Paris Cité, CNRS/IN2P3, Paris, France
T. Beau, G. Calderini, R. Camacho Toro, F. Crescioli, F. Derue, E. Egidio Purcino De Souza, L. Ginabat, Y. He, M. Khandoga, M. W. Krasny, D. Lacour, B. Laforge, B. Malaescu, I. Nikolic-Audit, J. Ocariz, L. Poggioli, V. Raskina, M. Ridel, L. Roos, R. H. M. Taibah & S. Trincaz-Duvoid
Department of Physics, University of Pennsylvania, Philadelphia, PA, USA
J. R. Dandoy, L. Flores, L. F. Gutierrez Zagazeta, J. G. Heinlein, A. Kahn, J. Kroll, E. Lipeles, S. Lu, J. J. Mullin, N. Proklova, J. D. Shahinian, E. Thomson, H. H. Williams & R. Xu
Department of Physics and Astronomy, University of Pittsburgh, Pittsburgh, PA, USA
M. Bandieramonte, R. M. Bianchi, J. Boudreau, H. Cai, B. T. Carlson, T. M. Hong, J. Mueller, A. A. Myers, C. W. Ng & H. J. Stelzer
Laboratório de Instrumentação e Física Experimental de Partículas-LIP, Lisbon, Portugal
S. P. Amor Dos Santos, M. G. Barros Teixeira, N. F. Castro, R. F. Coelho Barrue, P. Conde Muiño, G. Evans, M. C. N. Fiolhais, A. Gomes, R. Gonçalo, A. Maio, E. D. Mendes Gouveia, A. L. Moreira De Carvalho, I. Ochoa, L. F. Oleiro Seabra, A. Onofre, R. Pedro, B. C. Pinheiro Pereira, H. Santos, J. G. Saraiva, M. Stolarski, F. Veloso & H. Wolters
Departamento de Física, Faculdade de Ciências, Universidade de Lisboa, Lisbon, Portugal
A. Gomes, A. Maio & H. Santos
Departamento de Física, Universidade de Coimbra, Coimbra, Portugal
M. C. N. Fiolhais, R. Gonçalo, F. Veloso & H. Wolters
Centro de Física Nuclear da Universidade de Lisboa, Lisbon, Portugal
A. Maio & J. G. Saraiva
Departamento de Física, Universidade do Minho, Braga, Portugal
N. F. Castro & A. Onofre
Departamento de Física Teórica y del Cosmos, Universidad de Granada, Granada, Spain
J. A. Aguilar-Saavedra & M. Chala
Departamento de Física, Instituto Superior Técnico, Universidade de Lisboa, Lisbon, Portugal
P. Conde Muiño
Institute of Physics of the Czech Academy of Sciences, Prague, Czech Republic
J. Chudoba, P. Federicova, J. Hejbal, P. Jacka, O. Kepka, J. Kroll, A. Kupco, V. Latonova, M. Lokajicek, R. Lysak, M. Marcisovsky, M. Mikestikova, S. Nemecek, P. Sicho, P. Staroba, M. Svatos & M. Tasevsky
Czech Technical University in Prague, Prague, Czech Republic
B. Ali, K. Augsten, B. Bergmann, T. R. V. Billoud, M. Havranek, Z. Hubacek, P. Jacka, S. Mondal, M. Myska, L. Novotny, V. Petousis, R. Polifka, S. Pospisil, K. Smolek, A. Sopczak, V. Vacek, P. Vokac & O. Zaplatilek
Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic
P. Balek, P. Berta, M. Biros, T. Davidek, J. Dolejsi, Z. Dolezal, J. Faltova, P. Kodyš, M. Krivos, R. Leitner, K. Petukhova, V. Pleskot, S. Polacek, P. Reznicek, M. Rybar, D. Scheirich, M. Spousta, M. Sykora, T. Sykora, P. Tas, S. Todorova-Nova & V. Vorobel
Particle Physics Department, Rutherford Appleton Laboratory, Didcot, UK
T. Adye, J. T. Baines, G. A. Bird, W. Buttinger, J. Dopke, D. Emeliyanov, B. J. Gallop, E. Guilloton, J. Kirk, S. Martin-Haugh, S. J. McMahon, R. P. Middleton, W. J. Murray, R. E. Owen, P. W. Phillips, D. P. C. Sankey, C. Sawyer, B. H. Smart, J. Walder & M. Wielers
IRFU, CEA, Université Paris-Saclay, Gif-sur-Yvette, France
H. Bachacou, F. Balli, M. Boonekamp, L. Chevalier, F. Deliot, A. Formica, P. F. Giraud, C. Guyot, F. Jeanneau, T. Kawamoto, M. Kolb, A. Kotsokechagia, W. Kozanecki, J. F. Laporte, B. Mansoulie, J.-P. Meyer, R. Nicolaidou, A. Peyaud, M. Saimpert, L. Schoeffel, Ph. Schune, Ph. Schwemling, M. Vandenbroucke & Z. Wu
Santa Cruz Institute for Particle Physics, University of California Santa Cruz, Santa Cruz, CA, USA
A. A. Affolder, M. Battaglia, V. Fadeyev, C. M. Gee, M. Gignac, A. A. Grillo, M. Hance, J. W. Johnson, N. J. Kang, S. M. Mazza, J. Nielsen, H. F.-W. Sadrozinski, B. A. Schumm, H. R. Schwartz, A. Sciandra, A. Seiden, G. H. Stark & Y. Zhao
Departamento de Física, Pontificia Universidad Católica de Chile, Santiago, Chile
A. C. Abusleme Hoffman, M. A. Diaz & F. M. Garay Walls
Millennium Institute for Subatomic physics at high energy frontier (SAPHIR), Santiago, Chile
M. A. Diaz, F. M. Garay Walls, S. Kuleshov & J. A. Zamora Saa
Instituto de Investigación Multidisciplinario en Ciencia y Tecnología, y Departamento de Física, Universidad de La Serena, La Serena, Chile
P. A. Ulloa Poblete
Department of Physics, Universidad Andres Bello, Santiago, Chile
S. Kuleshov & J. A. Zamora Saa
Instituto de Alta Investigación, Universidad de Tarapacá, Arica, Chile
S. Kabana, T. Lagouri & S. A. Olivares Pino
Departamento de Física, Universidad Técnica Federico Santa María, Valparaíso, Chile
C. A. Allendes Flores, W. K. Brooks, E. Carquin, S. I. Fernandez Luengo, R. Pezoa, C. M. Robles Gajardo, S. Tapia Araya & N. Viaux Maira
Department of Physics, University of Washington, Seattle, WA, USA
C. Alpigiani, Q. Buat, S. J. Gasiorowski, A. G. Goussiou, S.-C. Hsu, E. E. Khoda, K. Li, Q. Liu, H. J. Lubatti, M. L. Proffitt, J. Schaarschmidt, W. Su, T. R. Van Daalen, G. Watts & H. Zhao
Department of Physics and Astronomy, University of Sheffield, Sheffield, UK
C. Anastopoulos, M. T. Anthony, D. Costanzo, A. Fell, J. J. Hall, M. C. Hodgkinson, P. Johansson, K. Lohwasser, J. C. MacDonald, H. Maguire, H. Mildner, M. B. Norfolk, J. E. Puddefoot, N. P. Readioff, K. A. Saoucha, D. R. Tovey, T. Vickey, O. E. Vickey Boeriu, D. F. Zhang & T. G. Zorbas
Department of Physics, Shinshu University, Nagano, Japan
Y. Hasegawa & K. Kawade
Department Physik, Universität Siegen, Siegen, Germany
B. Batool, P. Buchholz, M. Cristinziani, C. Diez Pardos, F. Fischer, I. Fleck, M. Ghneimat, A. Ghosal, G. Gomes Da Silva, I. Ibragimov, V. V. Kostyukhin, B. Mondal, A. Petrukhin, A. Rej, K. Voss, W. Walkowiak & M. Ziolkowski
Department of Physics, Simon Fraser University, Burnaby, BC, Canada
J. C. Burzynski, J. Chen, M. Danninger, T. Dias Do Vale, E. Drechsler, H. Hanif, B. P. Jaeger, K. Lehmann, B. X. Liu, J. Llorente Merino, D. C. O’Neil, A. Poley, S. Singh, B. Stelzer & M. C. Vetterli
SLAC National Accelerator Laboratory, Stanford, CA, USA
T. Barklow, R. Bartoldus, C. Bernius, B. A. Bullard, S. Cheong, R. B. Garg, P. Grenier, N. M. Hartman, R. Hyneman, M. Kagan, M. Kocian, J. Pearkes, M. Safdari, A. Salnikov, A. Schwartzman, R. Smith, D. Su, R. Teixeira De Lima, L. Tompkins, C. Vernieri, M. Wittgen, C. Young & Z. Zheng
Department of Physics, Royal Institute of Technology, Stockholm, Sweden
A. Leopold, O. Lundberg, B. Lund-Jensen, C. C. Ohm, G. Ripellino, R. Shaheen & J. Strandberg
Departments of Physics and Astronomy, Stony Brook University, Stony Brook, NY, USA
C. P. Bee, A. Behera, S. Bhatta, Y. Hernández Jiménez, J. Hobbs, J. Jia, Y. Ke, I. Luise, M. M. Lyukova, G. Piacquadio, M. Rijssenbeek, R. D. Schamberger, F. Tsai, V. Tsiskaridze & D. Tsybychev
Department of Physics and Astronomy, University of Sussex, Brighton, UK
B. M. M. Allbrooke, M. A. Aparo, A. Cerri, A. De Santo, Z. O. Earnshaw, M. O. Evans, M. Grandi, D. Kelsey, J. J. Kempster, D. M. Koeck, O. Kovanda, J. A. Mcfayden, B. Safarzadeh Samani, F. Salvatore, K. Shaw, H. Simpson, M. Spina, T. J. Stevenson, M. R. Sutton, I. Vivarelli & I. Xiotidis
School of Physics, University of Sydney, Sydney, Australia
S. Balaji, T. Nommensen, K. E. Varvell & B. Yabsley
Institute of Physics, Academia Sinica, Taipei, Taiwan
S. Ali, H. El Jarrari, S. Hou, S. C. Lee, R. Mazini, T. Varol & S. M. Wang
E. Andronikashvili Institute of Physics, Iv. Javakhishvili Tbilisi State University, Tbilisi, Georgia
J. Jejelava & E. G. Tskhadadze
High Energy Physics Institute, Tbilisi State University, Tbilisi, Georgia
B. Chargeishvili, T. Djobava, A. Durglishvili, J. Khubua, G. Mchedlidze, I. A. Minashvili, M. Mosidze & T. Zakareishvili
Department of Physics, Technion, Israel Institute of Technology, Haifa, Israel
H. Abreu, G. Avner, E. Kajomovitz, A. Laurier, D. Melini, Y. Rozen, S. Tarem & O. Tsur
Raymond and Beverly Sackler School of Physics and Astronomy, Tel Aviv University, Tel Aviv, Israel
H. Abramowicz, L. Barak, U. Barron, G. Bella, Y. Benhammou, B. Chen, H. Cohen, E. Etzion, G. Koren, M. S. Lutz, R. Nayak, L. Pascual Dominguez, D. Reikher, A. Soffer, N. M. Tamir & D. Vannicola
Department of Physics, Aristotle University of Thessaloniki, Thessaloniki, Greece
K. Bachas, I. Karkanias, E. Kasimi, K. Kordas, C. Lampoudis, A. Leisos, A. Marantis, I. Maznas, C. Petridou, D. Sampsonidis, A. Tsiamis, A. Tsirigotis, M. Tsopoulou, S. Tzamarias & A. Vgenopoulos
International Center for Elementary Particle Physics and Department of Physics, University of Tokyo, Tokyo, Japan
T. Aoki, S. Asai, W. Y. Chan, S. Chen, Y. Enari, S. Ganguly, R. Iguchi, M. Ishino, T. Kishimoto, T. Mashimo, T. Masubuchi, N. Matsuzawa, M. Morinaga, T. Nobe, R. Oishi, Y. Okumura, M. Saito, T. Saito, R. Sawada, K. Sugizaki, A. Tanaka, J. Tanaka, G. Tateno, K. Terashi, K. Uchida, J. Zang & T. Zhang
Department of Physics, Tokyo Institute of Technology, Tokyo, Japan
Y. He, O. Jinnouchi, S. Kanayama, E. Kim, M. Kuze, R. Ushioda & Y. Yamaguchi
Department of Physics, University of Toronto, Toronto, ON, Canada
L. Adamek, O. Arnaez, M. J. Basso, J. W. S. Carter, A. F. Casha, B. M. Ciungu, K. Dette, J. H. Foo, A. Gabrielli, C. A. Garner, Y. F. Han, N. Ilic, A. Kamenshchikov, S. Ketabchi Haghighat, D. P. Kisliuk, T. M. Knight, P. Krieger, H. Y. Meng, O. Miu, D. P. Mungo, R. S. Orr, T. H. Park, S. Roy-Garand, P. Savard, P. Sinervo, S. Singh, J. J. Teoh, R. J. Teuscher & L. M. Veloce
TRIUMF, Vancouver, BC, Canada
E. M. Carlson, S. V. Chekulaev, N. P. Hessey, L. L. Kurchaninov, E. Perez Codina, A. Poley, D. M. Portillo Quintero, B. Stelzer, O. Stelzer-Chilton, M. Swiatlowski, R. Tafirout, I. M. Trigger, S. Tsigaridas & M. Valente
Department of Physics and Astronomy, York University, Toronto, ON, Canada
C. David, M. J. Kareem, A. M. Rodríguez Vera, W. Y. Song, D. M. Starko & W. Taylor
Division of Physics and Tomonaga Center for the History of the Universe, Faculty of Pure and Applied Sciences, University of Tsukuba, Tsukuba, Japan
K. Hara, S. Hirose, K. Sato, F. Ukegawa, S. Wada, R. Wakasa & H. Yamauchi
Department of Physics and Astronomy, Tufts University, Medford, MA, USA
P. H. Beauchemin, V. Croft, A. S. Drobac & F. I. Kaya
United Arab Emirates University, Al Ain, United Arab Emirates
M. Belfkir
Department of Physics and Astronomy, University of California Irvine, Irvine, CA, USA
T. Cuhadar Donszelmann, M. J. Fenton, A. Ghosh, A. J. Lankford, I. Longarini, K. Ntekas, J. L. Oliver, M. J. R. Olsson, J. T. Roemer, M. Schernau, A. Taffard, G. Unel, D. Whiteson & J. Wollrath
Department of Physics and Astronomy, University of Uppsala, Uppsala, Sweden
E. Bergeaas Kuutmann, R. Brenner, C. Dimitriadi, T. Ekelof, V. Ellajosyula, M. Ellert, A. Ferrari, R. Gonzalez Suarez, T. Mathisen, G. A. Mullier, S. Oerdek, J. Steentoft & O. Sunneborn Gudnadottir
Department of Physics, University of Illinois, Urbana, IL, USA
M. Atkinson, V. R. Bailey, Y. Cao, B. H. Hooberman, J. D. Long, R. Longo, M. S. Neubauer, M. W. Phipps, A. C. Romero Hernandez, A. Roy, A. M. Sickles, A. C. Tate, X. Wang, J. C. Zeng & D. Zhong
Instituto de Física Corpuscular (IFIC), Centro Mixto Universidad de Valencia-CSIC, Valencia, Spain
K. R. Amos, J. A. Aparisi Pozo, A. J. Bailey, N. Bouchhar, S. Cabrera Urbán, J. Cantero, F. Cardillo, V. Castillo Gimenez, M. Chitishvili, M. J. Costa, M. Didenko, C. Escobar, L. Fiorini, E. Fullana Torregrosa, J. Fuster, C. García, J. E. García Navarro, A. J. Gomez Delegido, S. González de la Hoz, G. R. Gonzalvo Rodriguez, J. G. R. Guerrero Rojas, E. Higón-Rodriguez, C. Lacasta, J. J. Lozano Bahilo, S. Marti-Garcia, P. Martinez Agullo, M. Miralles Lopez, V. A. Mitsou, L. Monsonis Romero, M. Moreno Llácer, D. Munoz Perez, J. Navarro-Gonzalez, J. Poveda, A. Prades Ibanez, A. Rubio Jimenez, A. Ruiz-Martinez, P. Sabatini, J. Salt, J. Sánchez, V. Sanchez Sebastian, I. Sayago Galvan, V. Senthilkumar, U. Soldevila, E. Torró Pastor, A. Valero, J. A. Valls Ferrer, L. Varriale, M. Villaplana Perez & M. Vos
Department of Physics, University of British Columbia, Vancouver, BC, Canada
F. Cormier, C. Gay, C. Gubbels, R. L. Hayes, C. M. Helling, A. Lister, R. Newhouse, A. S. Sharma, Z. Tao & V. W. S. Wong
Department of Physics and Astronomy, University of Victoria, Victoria, BC, Canada
J. Albert, L. M. Brown, C. Camincher, E. M. Carlson, B. Chen, Y. H. Chiu, M. Ghasemi Bostanabad, K. Hamano, E. F. Kay, R. Keeler, R. Kowalewski, M. Lefebvre, D. M. Mac Donell, K. D. McLean, R. A. McPherson, J. C. Rivera Vergara, H. L. Russell, M. J. Shroff, R. Sobie & G. A. Vasquez
Fakultät für Physik und Astronomie, Julius-Maximilians-Universität Würzburg, Würzburg, Germany
D. S. Bhattacharya, M. Haleem, G. Khoriauli, L. Klein, R. Ströhmer, T. Swirski & T. Trefzger
Department of Physics, University of Warwick, Coventry, UK
K. Becker, E. Guilloton, P. F. Harrison, E. Jones, B. P. Kerridge, T. A. Martin, A. Mitra, S. Morgenstern, W. J. Murray, C. S. Pollard, B. A. Roberts & V. Vladimirov
Waseda University, Tokyo, Japan
H. Ito, T. Kaji, T. Mitani, Y. Shimogama & K. Yorita
Department of Particle Physics and Astrophysics, Weizmann Institute of Science, Rehovot, Israel
I. Aizenberg, M. Birman, R. Brener, S. Bressler, Z. H. Citron, E. Dreyer, E. Duchovni, E. Gross, N. Hod, A. Ivina, T. Jakoubek, N. Kakati, L. J. Levinson, I. M. Maniatis, D. C. Mankad, G. Mikenberg, A. Milov, I. Ravinovich, A. Santra, D. Shaked Renous, J. Shlomi & V. Smakhtin
Department of Physics, University of Wisconsin, Madison, WI, USA
D. Biswas, J. Chan, C. L. Cheng, M. Feickert, W. Guan, A. Held, W. Islam, T. M. Pham, S. Sun, A. S. Tee, A. Z. Wang, W. Wiedenmann, S. L. Wu, R. Zhang & C. Zhou
Fakultät für Mathematik und Naturwissenschaften, Fachgruppe Physik, Bergische Universität Wuppertal, Wuppertal, Germany
V. A. Austrup, G. Brandt, C. Dülsen, F. Ellinghaus, M. Errenst, T. Flick, M. E. Geyik, T. Harenberg, D. Hirschbuehl, G. Jäkel, S. Kersten, J. A. Reidelsturz, M. Rezaei Estabragh, J. Roggel, M. Sandhoff, J. Schmeing, M. A. Schmidt, F. Schroeder, O. Thielmann, W. Wagner, S. Wahdan & C. Zeitnitz
Department of Physics, Yale University, New Haven, CT, USA
O. K. Baker, E. G. Castiglia, S. Demers, J. Pan, G. Pezzullo, C. O. Shimmin & P. Tipton
Affiliated with an institute covered by a cooperation agreement with CERN, Geneva, Switzerland
G. A. Chelkov, O. L. Fedin, N. Huseynov, Y. Kulchitsky, A. G. Myagkov, V. Nikolaenko, L. N. Smirnova & V. Tikhomirov
An-Najah National University, Nablus, Palestine
A. Bassalat
Borough of Manhattan Community College, City University of New York, New York, NY, USA
M. C. N. Fiolhais
Bruno Kessler Foundation, Trento, Italy
M. Cristoforetti
Center for High Energy Physics, Peking University, Beijing, China
S. Li
Center for Interdisciplinary Research and Innovation (CIRI-AUTH), Thessaloniki, Greece
I. Karkanias, E. Kasimi, K. Kordas, C. Lampoudis, I. Maznas, C. Petridou, D. Sampsonidis, A. Tsiamis, M. Tsopoulou, S. Tzamarias & A. Vgenopoulos
Centro Studi e Ricerche Enrico Fermi, Rome, Italy
I. Gnesi
CERN, Geneva, Switzerland
P. Jenni
Département de Physique Nucléaire et Corpusculaire, Université de Genève, Genève, Switzerland
M. Nessi
Departament de Fisica de la Universitat Autonoma de Barcelona, Barcelona, Spain
M. P. Casado
Department of Financial and Management Engineering, University of the Aegean, Chios, Greece
L. Fountas & I. Gkialas
Department of Physics and Astronomy, Michigan State University, East Lansing, MI, USA
R. Yuan
Department of Physics, Ben Gurion University of the Negev, Beer Sheva, Israel
Z. H. Citron
Department of Physics, California State University, East Bay, USA
K. Grimm
Department of Physics, California State University, Sacramento, USA
J. Moss
Department of Physics, King’s College London, London, UK
B. S. Acharya
Department of Physics, Stanford University, Stanford, CA, USA
R. B. Garg & L. Tompkins
Department of Physics, University of Fribourg, Fribourg, Switzerland
H. P. Beck
Department of Physics, University of Thessaly, Volos, Greece
K. Bachas
Department of Physics, Westmont College, Santa Barbara, USA
B. T. Carlson
Hellenic Open University, Patras, Greece
A. Leisos, A. Marantis & A. Tsirigotis
Institucio Catalana de Recerca i Estudis Avancats, ICREA, Barcelona, Spain
S. Grinstein, A. Juste Rozas & M. Martinez
Institut für Experimentalphysik, Universität Hamburg, Hamburg, Germany
K. Tackmann
Institute of Applied Physics, Mohammed VI Polytechnic University, Ben Guerir, Morocco
Y. Tayalati
Institute of Particle Physics (IPP), Canada
F. Corriveau, R. A. McPherson, S. H. Robertson, R. Sobie & R. J. Teuscher
Institute of Physics and Technology, Ulaanbaatar, Mongolia
T. Turtuvshin
Institute of Physics, Azerbaijan Academy of Sciences, Baku, Azerbaijan
F. Ahmadov
Institute of Theoretical Physics, Ilia State University, Tbilisi, Georgia
J. Jejelava
L2IT, Université de Toulouse, CNRS/IN2P3, UPS, Toulouse, France
C. Rougier, J. Stark & A. Vallier
Lawrence Livermore National Laboratory, Livermore, USA
A. Angerami & D. A. Hangal
National Institute of Physics, University of the Philippines Diliman (Philippines), Quezon City, Philippines
M. Flores
Technical University of Munich, Munich, Germany
L. Heinrich
The Collaborative Innovation Center of Quantum Matter (CICQM), Beijing, China
X. Chen
TRIUMF, Vancouver, BC, Canada
G. Azuelos, D. M. Gingrich, F. G. Oakham, P. Savard & M. C. Vetterli
Università di Napoli Parthenope, Naples, Italy
F. Conventi
University of Chinese Academy of Sciences (UCAS), Beijing, China
Y. F. Hu
Department of Physics, University of Colorado Boulder, Colorado, USA
R. Bi, S. J. Das, B. Garcia, Y. Go, J. L. Nagle, J. Ouellette & D. V. Perepelitsa
Washington College, Chestertown, MD, USA
S. Shrestha
Yeditepe University, Physics Department, Istanbul, Türkiye
S. Istin
Institute for Nuclear Research and Nuclear Energy (INRNE) of the Bulgarian Academy of Sciences, Sofia, Bulgaria
M. Shiyakova
- G. Aad
You can also search for this author in PubMed Google Scholar
- B. Abbott
You can also search for this author in PubMed Google Scholar
- D. C. Abbott
You can also search for this author in PubMed Google Scholar
- K. Abeling
You can also search for this author in PubMed Google Scholar
- S. H. Abidi
You can also search for this author in PubMed Google Scholar
- A. Aboulhorma
You can also search for this author in PubMed Google Scholar
- H. Abramowicz
You can also search for this author in PubMed Google Scholar
- H. Abreu
You can also search for this author in PubMed Google Scholar
- Y. Abulaiti
You can also search for this author in PubMed Google Scholar
- A. C. Abusleme Hoffman
You can also search for this author in PubMed Google Scholar
- B. S. Acharya
You can also search for this author in PubMed Google Scholar
- C. Adam Bourdarios
You can also search for this author in PubMed Google Scholar
- L. Adamczyk
You can also search for this author in PubMed Google Scholar
- L. Adamek
You can also search for this author in PubMed Google Scholar
- S. V. Addepalli
You can also search for this author in PubMed Google Scholar
- J. Adelman
You can also search for this author in PubMed Google Scholar
- A. Adiguzel
You can also search for this author in PubMed Google Scholar
- S. Adorni
You can also search for this author in PubMed Google Scholar
- T. Adye
You can also search for this author in PubMed Google Scholar
- A. A. Affolder
You can also search for this author in PubMed Google Scholar
- Y. Afik
You can also search for this author in PubMed Google Scholar
- M. N. Agaras
You can also search for this author in PubMed Google Scholar
- J. Agarwala
You can also search for this author in PubMed Google Scholar
- A. Aggarwal
You can also search for this author in PubMed Google Scholar
- C. Agheorghiesei
You can also search for this author in PubMed Google Scholar
- J. A. Aguilar-Saavedra
You can also search for this author in PubMed Google Scholar
- A. Ahmad
You can also search for this author in PubMed Google Scholar
- F. Ahmadov
You can also search for this author in PubMed Google Scholar
- W. S. Ahmed
You can also search for this author in PubMed Google Scholar
- S. Ahuja
You can also search for this author in PubMed Google Scholar
- X. Ai
You can also search for this author in PubMed Google Scholar
- G. Aielli
You can also search for this author in PubMed Google Scholar
- M. Ait Tamlihat
You can also search for this author in PubMed Google Scholar
- B. Aitbenchikh
You can also search for this author in PubMed Google Scholar
- I. Aizenberg
You can also search for this author in PubMed Google Scholar
- M. Akbiyik
You can also search for this author in PubMed Google Scholar
- T. P. A. Åkesson
You can also search for this author in PubMed Google Scholar
- A. V. Akimov
You can also search for this author in PubMed Google Scholar
- K. Al Khoury
You can also search for this author in PubMed Google Scholar
- G. L. Alberghi
You can also search for this author in PubMed Google Scholar
- J. Albert
You can also search for this author in PubMed Google Scholar
- P. Albicocco
You can also search for this author in PubMed Google Scholar
- S. Alderweireldt
You can also search for this author in PubMed Google Scholar
- M. Aleksa
You can also search for this author in PubMed Google Scholar
- I. N. Aleksandrov
You can also search for this author in PubMed Google Scholar
- C. Alexa
You can also search for this author in PubMed Google Scholar
- T. Alexopoulos
You can also search for this author in PubMed Google Scholar
- A. Alfonsi
You can also search for this author in PubMed Google Scholar
- F. Alfonsi
You can also search for this author in PubMed Google Scholar
- M. Alhroob
You can also search for this author in PubMed Google Scholar
- B. Ali
You can also search for this author in PubMed Google Scholar
- S. Ali
You can also search for this author in PubMed Google Scholar
- M. Aliev
You can also search for this author in PubMed Google Scholar
- G. Alimonti
You can also search for this author in PubMed Google Scholar
- W. Alkakhi
You can also search for this author in PubMed Google Scholar
- C. Allaire
You can also search for this author in PubMed Google Scholar
- B. M. M. Allbrooke
You can also search for this author in PubMed Google Scholar
- C. A. Allendes Flores
You can also search for this author in PubMed Google Scholar
- P. P. Allport
You can also search for this author in PubMed Google Scholar
- A. Aloisio
You can also search for this author in PubMed Google Scholar
- F. Alonso
You can also search for this author in PubMed Google Scholar
- C. Alpigiani
You can also search for this author in PubMed Google Scholar
- M. Alvarez Estevez
You can also search for this author in PubMed Google Scholar
- A. Alvarez Fernandez
You can also search for this author in PubMed Google Scholar
- M. G. Alviggi
You can also search for this author in PubMed Google Scholar
- M. Aly
You can also search for this author in PubMed Google Scholar
- Y. Amaral Coutinho
You can also search for this author in PubMed Google Scholar
- A. Ambler
You can also search for this author in PubMed Google Scholar
- C. Amelung
You can also search for this author in PubMed Google Scholar
- M. Amerl
You can also search for this author in PubMed Google Scholar
- C. G. Ames
You can also search for this author in PubMed Google Scholar
- D. Amidei
You can also search for this author in PubMed Google Scholar
- S. P. Amor Dos Santos
You can also search for this author in PubMed Google Scholar
- K. R. Amos
You can also search for this author in PubMed Google Scholar
- V. Ananiev
You can also search for this author in PubMed Google Scholar
- C. Anastopoulos
You can also search for this author in PubMed Google Scholar
- T. Andeen
You can also search for this author in PubMed Google Scholar
- J. K. Anders
You can also search for this author in PubMed Google Scholar
- S. Y. Andrean
You can also search for this author in PubMed Google Scholar
- A. Andreazza
You can also search for this author in PubMed Google Scholar
- S. Angelidakis
You can also search for this author in PubMed Google Scholar
- A. Angerami
You can also search for this author in PubMed Google Scholar
- A. V. Anisenkov
You can also search for this author in PubMed Google Scholar
- A. Annovi
You can also search for this author in PubMed Google Scholar
- C. Antel
You can also search for this author in PubMed Google Scholar
- M. T. Anthony
You can also search for this author in PubMed Google Scholar
- E. Antipov
You can also search for this author in PubMed Google Scholar
- M. Antonelli
You can also search for this author in PubMed Google Scholar
- D. J. A. Antrim
You can also search for this author in PubMed Google Scholar
- F. Anulli
You can also search for this author in PubMed Google Scholar
- M. Aoki
You can also search for this author in PubMed Google Scholar
- T. Aoki
You can also search for this author in PubMed Google Scholar
- J. A. Aparisi Pozo
You can also search for this author in PubMed Google Scholar
- M. A. Aparo
You can also search for this author in PubMed Google Scholar
- L. Aperio Bella
You can also search for this author in PubMed Google Scholar
- C. Appelt
You can also search for this author in PubMed Google Scholar
- N. Aranzabal
You can also search for this author in PubMed Google Scholar
- V. Araujo Ferraz
You can also search for this author in PubMed Google Scholar
- C. Arcangeletti
You can also search for this author in PubMed Google Scholar
- A. T. H. Arce
You can also search for this author in PubMed Google Scholar
- E. Arena
You can also search for this author in PubMed Google Scholar
- J.-F. Arguin
You can also search for this author in PubMed Google Scholar
- S. Argyropoulos
You can also search for this author in PubMed Google Scholar
- J.-H. Arling
You can also search for this author in PubMed Google Scholar
- A. J. Armbruster
You can also search for this author in PubMed Google Scholar
- O. Arnaez
You can also search for this author in PubMed Google Scholar
- H. Arnold
You can also search for this author in PubMed Google Scholar
- Z. P. Arrubarrena Tame
You can also search for this author in PubMed Google Scholar
- G. Artoni
You can also search for this author in PubMed Google Scholar
- H. Asada
You can also search for this author in PubMed Google Scholar
- K. Asai
You can also search for this author in PubMed Google Scholar
- S. Asai
You can also search for this author in PubMed Google Scholar
- N. A. Asbah
You can also search for this author in PubMed Google Scholar
- J. Assahsah
You can also search for this author in PubMed Google Scholar
- K. Assamagan
You can also search for this author in PubMed Google Scholar
- R. Astalos
You can also search for this author in PubMed Google Scholar
- R. J. Atkin
You can also search for this author in PubMed Google Scholar
- M. Atkinson
You can also search for this author in PubMed Google Scholar
- N. B. Atlay
You can also search for this author in PubMed Google Scholar
- H. Atmani
You can also search for this author in PubMed Google Scholar
- P. A. Atmasiddha
You can also search for this author in PubMed Google Scholar
- K. Augsten
You can also search for this author in PubMed Google Scholar
- S. Auricchio
You can also search for this author in PubMed Google Scholar
- A. D. Auriol
You can also search for this author in PubMed Google Scholar
- V. A. Austrup
You can also search for this author in PubMed Google Scholar
- G. Avner
You can also search for this author in PubMed Google Scholar
- G. Avolio
You can also search for this author in PubMed Google Scholar
- K. Axiotis
You can also search for this author in PubMed Google Scholar
- G. Azuelos
You can also search for this author in PubMed Google Scholar
- D. Babal
You can also search for this author in PubMed Google Scholar
- H. Bachacou
You can also search for this author in PubMed Google Scholar
- K. Bachas
You can also search for this author in PubMed Google Scholar
- A. Bachiu
You can also search for this author in PubMed Google Scholar
- F. Backman
You can also search for this author in PubMed Google Scholar
- A. Badea
You can also search for this author in PubMed Google Scholar
- P. Bagnaia
You can also search for this author in PubMed Google Scholar
- M. Bahmani
You can also search for this author in PubMed Google Scholar
- A. J. Bailey
You can also search for this author in PubMed Google Scholar
- V. R. Bailey
You can also search for this author in PubMed Google Scholar
- J. T. Baines
You can also search for this author in PubMed Google Scholar
- C. Bakalis
You can also search for this author in PubMed Google Scholar
- O. K. Baker
You can also search for this author in PubMed Google Scholar
- P. J. Bakker
You can also search for this author in PubMed Google Scholar
- E. Bakos
You can also search for this author in PubMed Google Scholar
- D. Bakshi Gupta
You can also search for this author in PubMed Google Scholar
- S. Balaji
You can also search for this author in PubMed Google Scholar
- R. Balasubramanian
You can also search for this author in PubMed Google Scholar
- E. M. Baldin
You can also search for this author in PubMed Google Scholar
- P. Balek
You can also search for this author in PubMed Google Scholar
- E. Ballabene
You can also search for this author in PubMed Google Scholar
- F. Balli
You can also search for this author in PubMed Google Scholar
- L. M. Baltes
You can also search for this author in PubMed Google Scholar
- W. K. Balunas
You can also search for this author in PubMed Google Scholar
- J. Balz
You can also search for this author in PubMed Google Scholar
- E. Banas
You can also search for this author in PubMed Google Scholar
- M. Bandieramonte
You can also search for this author in PubMed Google Scholar
- A. Bandyopadhyay
You can also search for this author in PubMed Google Scholar
- S. Bansal
You can also search for this author in PubMed Google Scholar
- L. Barak
You can also search for this author in PubMed Google Scholar
- E. L. Barberio
You can also search for this author in PubMed Google Scholar
- D. Barberis
You can also search for this author in PubMed Google Scholar
- M. Barbero
You can also search for this author in PubMed Google Scholar
- G. Barbour
You can also search for this author in PubMed Google Scholar
- K. N. Barends
You can also search for this author in PubMed Google Scholar
- T. Barillari
You can also search for this author in PubMed Google Scholar
- M.-S. Barisits
You can also search for this author in PubMed Google Scholar
- T. Barklow
You can also search for this author in PubMed Google Scholar
- R. M. Barnett
You can also search for this author in PubMed Google Scholar
- P. Baron
You can also search for this author in PubMed Google Scholar
- D. A. Baron Moreno
You can also search for this author in PubMed Google Scholar
- A. Baroncelli
You can also search for this author in PubMed Google Scholar
- G. Barone
You can also search for this author in PubMed Google Scholar
- A. J. Barr
You can also search for this author in PubMed Google Scholar
- L. Barranco Navarro
You can also search for this author in PubMed Google Scholar
- F. Barreiro
You can also search for this author in PubMed Google Scholar
- J. Barreiro Guimarães da Costa
You can also search for this author in PubMed Google Scholar
- U. Barron
You can also search for this author in PubMed Google Scholar
- M. G. Barros Teixeira
You can also search for this author in PubMed Google Scholar
- S. Barsov
You can also search for this author in PubMed Google Scholar
- F. Bartels
You can also search for this author in PubMed Google Scholar
- R. Bartoldus
You can also search for this author in PubMed Google Scholar
- A. E. Barton
You can also search for this author in PubMed Google Scholar
- P. Bartos
You can also search for this author in PubMed Google Scholar
- A. Basalaev
You can also search for this author in PubMed Google Scholar
- A. Basan
You can also search for this author in PubMed Google Scholar
- M. Baselga
You can also search for this author in PubMed Google Scholar
- I. Bashta
You can also search for this author in PubMed Google Scholar
- A. Bassalat
You can also search for this author in PubMed Google Scholar
- M. J. Basso
You can also search for this author in PubMed Google Scholar
- C. R. Basson
You can also search for this author in PubMed Google Scholar
- R. L. Bates
You can also search for this author in PubMed Google Scholar
- S. Batlamous
You can also search for this author in PubMed Google Scholar
- J. R. Batley
You can also search for this author in PubMed Google Scholar
- B. Batool
You can also search for this author in PubMed Google Scholar
- M. Battaglia
You can also search for this author in PubMed Google Scholar
- D. Battulga
You can also search for this author in PubMed Google Scholar
- M. Bauce
You can also search for this author in PubMed Google Scholar
- P. Bauer
You can also search for this author in PubMed Google Scholar
- J. B. Beacham
You can also search for this author in PubMed Google Scholar
- T. Beau
You can also search for this author in PubMed Google Scholar
- P. H. Beauchemin
You can also search for this author in PubMed Google Scholar
- F. Becherer
You can also search for this author in PubMed Google Scholar
- P. Bechtle
You can also search for this author in PubMed Google Scholar
- H. P. Beck
You can also search for this author in PubMed Google Scholar
- K. Becker
You can also search for this author in PubMed Google Scholar
- A. J. Beddall
You can also search for this author in PubMed Google Scholar
- V. A. Bednyakov
You can also search for this author in PubMed Google Scholar
- C. P. Bee
You can also search for this author in PubMed Google Scholar
- L. J. Beemster
You can also search for this author in PubMed Google Scholar
- T. A. Beermann
You can also search for this author in PubMed Google Scholar
- M. Begalli
You can also search for this author in PubMed Google Scholar
- M. Begel
You can also search for this author in PubMed Google Scholar
- A. Behera
You can also search for this author in PubMed Google Scholar
- J. K. Behr
You can also search for this author in PubMed Google Scholar
- C. Beirao Da Cruz E Silva
You can also search for this author in PubMed Google Scholar
- J. F. Beirer
You can also search for this author in PubMed Google Scholar
- F. Beisiegel
You can also search for this author in PubMed Google Scholar
- M. Belfkir
You can also search for this author in PubMed Google Scholar
- G. Bella
You can also search for this author in PubMed Google Scholar
- L. Bellagamba
You can also search for this author in PubMed Google Scholar
- A. Bellerive
You can also search for this author in PubMed Google Scholar
- P. Bellos
You can also search for this author in PubMed Google Scholar
- K. Beloborodov
You can also search for this author in PubMed Google Scholar
- K. Belotskiy
You can also search for this author in PubMed Google Scholar
- N. L. Belyaev
You can also search for this author in PubMed Google Scholar
- D. Benchekroun
You can also search for this author in PubMed Google Scholar
- F. Bendebba
You can also search for this author in PubMed Google Scholar
- Y. Benhammou
You can also search for this author in PubMed Google Scholar
- D. P. Benjamin
You can also search for this author in PubMed Google Scholar
- M. Benoit
You can also search for this author in PubMed Google Scholar
- J. R. Bensinger
You can also search for this author in PubMed Google Scholar
- S. Bentvelsen
You can also search for this author in PubMed Google Scholar
- L. Beresford
You can also search for this author in PubMed Google Scholar
- M. Beretta
You can also search for this author in PubMed Google Scholar
- E. Bergeaas Kuutmann
You can also search for this author in PubMed Google Scholar
- N. Berger
You can also search for this author in PubMed Google Scholar
- B. Bergmann
You can also search for this author in PubMed Google Scholar
- J. Beringer
You can also search for this author in PubMed Google Scholar
- S. Berlendis
You can also search for this author in PubMed Google Scholar
- G. Bernardi
You can also search for this author in PubMed Google Scholar
- C. Bernius
You can also search for this author in PubMed Google Scholar
- F. U. Bernlochner
You can also search for this author in PubMed Google Scholar
- T. Berry
You can also search for this author in PubMed Google Scholar
- P. Berta
You can also search for this author in PubMed Google Scholar
- A. Berthold
You can also search for this author in PubMed Google Scholar
- I. A. Bertram
You can also search for this author in PubMed Google Scholar
- S. Bethke
You can also search for this author in PubMed Google Scholar
- A. Betti
You can also search for this author in PubMed Google Scholar
- A. J. Bevan
You can also search for this author in PubMed Google Scholar
- M. Bhamjee
You can also search for this author in PubMed Google Scholar
- S. Bhatta
You can also search for this author in PubMed Google Scholar
- D. S. Bhattacharya
You can also search for this author in PubMed Google Scholar
- P. Bhattarai
You can also search for this author in PubMed Google Scholar
- V. S. Bhopatkar
You can also search for this author in PubMed Google Scholar
- R. Bi
You can also search for this author in PubMed Google Scholar
- R. M. Bianchi
You can also search for this author in PubMed Google Scholar
- O. Biebel
You can also search for this author in PubMed Google Scholar
- R. Bielski
You can also search for this author in PubMed Google Scholar
- M. Biglietti
You can also search for this author in PubMed Google Scholar
- T. R. V. Billoud
You can also search for this author in PubMed Google Scholar
- M. Bindi
You can also search for this author in PubMed Google Scholar
- A. Bingul
You can also search for this author in PubMed Google Scholar
- C. Bini
You can also search for this author in PubMed Google Scholar
- A. Biondini
You can also search for this author in PubMed Google Scholar
- C. J. Birch-sykes
You can also search for this author in PubMed Google Scholar
- G. A. Bird
You can also search for this author in PubMed Google Scholar
- M. Birman
You can also search for this author in PubMed Google Scholar
- M. Biros
You can also search for this author in PubMed Google Scholar
- T. Bisanz
You can also search for this author in PubMed Google Scholar
- E. Bisceglie
You can also search for this author in PubMed Google Scholar
- D. Biswas
You can also search for this author in PubMed Google Scholar
- A. Bitadze
You can also search for this author in PubMed Google Scholar
- K. Bjørke
You can also search for this author in PubMed Google Scholar
- I. Bloch
You can also search for this author in PubMed Google Scholar
- C. Blocker
You can also search for this author in PubMed Google Scholar
- A. Blue
You can also search for this author in PubMed Google Scholar
- U. Blumenschein
You can also search for this author in PubMed Google Scholar
- J. Blumenthal
You can also search for this author in PubMed Google Scholar
- G. J. Bobbink
You can also search for this author in PubMed Google Scholar
- V. S. Bobrovnikov
You can also search for this author in PubMed Google Scholar
- M. Boehler
You can also search for this author in PubMed Google Scholar
- D. Bogavac
You can also search for this author in PubMed Google Scholar
- A. G. Bogdanchikov
You can also search for this author in PubMed Google Scholar
- C. Bohm
You can also search for this author in PubMed Google Scholar
- V. Boisvert
You can also search for this author in PubMed Google Scholar
- P. Bokan
You can also search for this author in PubMed Google Scholar
- T. Bold
You can also search for this author in PubMed Google Scholar
- M. Bomben
You can also search for this author in PubMed Google Scholar
- M. Bona
You can also search for this author in PubMed Google Scholar
- M. Boonekamp
You can also search for this author in PubMed Google Scholar
- C. D. Booth
You can also search for this author in PubMed Google Scholar
- A. G. Borbély
You can also search for this author in PubMed Google Scholar
- H. M. Borecka-Bielska
You can also search for this author in PubMed Google Scholar
- L. S. Borgna
You can also search for this author in PubMed Google Scholar
- G. Borissov
You can also search for this author in PubMed Google Scholar
- D. Bortoletto
You can also search for this author in PubMed Google Scholar
- D. Boscherini
You can also search for this author in PubMed Google Scholar
- M. Bosman
You can also search for this author in PubMed Google Scholar
- J. D. Bossio Sola
You can also search for this author in PubMed Google Scholar
- K. Bouaouda
You can also search for this author in PubMed Google Scholar
- N. Bouchhar
You can also search for this author in PubMed Google Scholar
- J. Boudreau
You can also search for this author in PubMed Google Scholar
- E. V. Bouhova-Thacker
You can also search for this author in PubMed Google Scholar
- D. Boumediene
You can also search for this author in PubMed Google Scholar
- R. Bouquet
You can also search for this author in PubMed Google Scholar
- A. Boveia
You can also search for this author in PubMed Google Scholar
- J. Boyd
You can also search for this author in PubMed Google Scholar
- D. Boye
You can also search for this author in PubMed Google Scholar
- I. R. Boyko
You can also search for this author in PubMed Google Scholar
- J. Bracinik
You can also search for this author in PubMed Google Scholar
- N. Brahimi
You can also search for this author in PubMed Google Scholar
- G. Brandt
You can also search for this author in PubMed Google Scholar
- O. Brandt
You can also search for this author in PubMed Google Scholar
- F. Braren
You can also search for this author in PubMed Google Scholar
- B. Brau
You can also search for this author in PubMed Google Scholar
- J. E. Brau
You can also search for this author in PubMed Google Scholar
- K. Brendlinger
You can also search for this author in PubMed Google Scholar
- R. Brener
You can also search for this author in PubMed Google Scholar
- L. Brenner
You can also search for this author in PubMed Google Scholar
- R. Brenner
You can also search for this author in PubMed Google Scholar
- S. Bressler
You can also search for this author in PubMed Google Scholar
- D. Britton
You can also search for this author in PubMed Google Scholar
- D. Britzger
You can also search for this author in PubMed Google Scholar
- I. Brock
You can also search for this author in PubMed Google Scholar
- G. Brooijmans
You can also search for this author in PubMed Google Scholar
- W. K. Brooks
You can also search for this author in PubMed Google Scholar
- E. Brost
You can also search for this author in PubMed Google Scholar
- L. M. Brown
You can also search for this author in PubMed Google Scholar
- T. L. Bruckler
You can also search for this author in PubMed Google Scholar
- P. A. Bruckman de Renstrom
You can also search for this author in PubMed Google Scholar
- B. Brüers
You can also search for this author in PubMed Google Scholar
- D. Bruncko
You can also search for this author in PubMed Google Scholar
- A. Bruni
You can also search for this author in PubMed Google Scholar
- G. Bruni
You can also search for this author in PubMed Google Scholar
- M. Bruschi
You can also search for this author in PubMed Google Scholar
- N. Bruscino
You can also search for this author in PubMed Google Scholar
- T. Buanes
You can also search for this author in PubMed Google Scholar
- Q. Buat
You can also search for this author in PubMed Google Scholar
- P. Buchholz
You can also search for this author in PubMed Google Scholar
- A. G. Buckley
You can also search for this author in PubMed Google Scholar
- I. A. Budagov
You can also search for this author in PubMed Google Scholar
- M. K. Bugge
You can also search for this author in PubMed Google Scholar
- O. Bulekov
You can also search for this author in PubMed Google Scholar
- B. A. Bullard
You can also search for this author in PubMed Google Scholar
- S. Burdin
You can also search for this author in PubMed Google Scholar
- C. D. Burgard
You can also search for this author in PubMed Google Scholar
- A. M. Burger
You can also search for this author in PubMed Google Scholar
- B. Burghgrave
You can also search for this author in PubMed Google Scholar
- J. T. P. Burr
You can also search for this author in PubMed Google Scholar
- C. D. Burton
You can also search for this author in PubMed Google Scholar
- J. C. Burzynski
You can also search for this author in PubMed Google Scholar
- E. L. Busch
You can also search for this author in PubMed Google Scholar
- V. Büscher
You can also search for this author in PubMed Google Scholar
- P. J. Bussey
You can also search for this author in PubMed Google Scholar
- J. M. Butler
You can also search for this author in PubMed Google Scholar
- C. M. Buttar
You can also search for this author in PubMed Google Scholar
- J. M. Butterworth
You can also search for this author in PubMed Google Scholar
- W. Buttinger
You can also search for this author in PubMed Google Scholar
- C. J. Buxo Vazquez
You can also search for this author in PubMed Google Scholar
- A. R. Buzykaev
You can also search for this author in PubMed Google Scholar
- G. Cabras
You can also search for this author in PubMed Google Scholar
- S. Cabrera Urbán
You can also search for this author in PubMed Google Scholar
- D. Caforio
You can also search for this author in PubMed Google Scholar
- H. Cai
You can also search for this author in PubMed Google Scholar
- Y. Cai
You can also search for this author in PubMed Google Scholar
- V. M. M. Cairo
You can also search for this author in PubMed Google Scholar
- O. Cakir
You can also search for this author in PubMed Google Scholar
- N. Calace
You can also search for this author in PubMed Google Scholar
- P. Calafiura
You can also search for this author in PubMed Google Scholar
- G. Calderini
You can also search for this author in PubMed Google Scholar
- P. Calfayan
You can also search for this author in PubMed Google Scholar
- G. Callea
You can also search for this author in PubMed Google Scholar
- L. P. Caloba
You can also search for this author in PubMed Google Scholar
- D. Calvet
You can also search for this author in PubMed Google Scholar
- S. Calvet
You can also search for this author in PubMed Google Scholar
- T. P. Calvet
You can also search for this author in PubMed Google Scholar
- M. Calvetti
You can also search for this author in PubMed Google Scholar
- R. Camacho Toro
You can also search for this author in PubMed Google Scholar
- S. Camarda
You can also search for this author in PubMed Google Scholar
- D. Camarero Munoz
You can also search for this author in PubMed Google Scholar
- P. Camarri
You can also search for this author in PubMed Google Scholar
- M. T. Camerlingo
You can also search for this author in PubMed Google Scholar
- D. Cameron
You can also search for this author in PubMed Google Scholar
- C. Camincher
You can also search for this author in PubMed Google Scholar
- M. Campanelli
You can also search for this author in PubMed Google Scholar
- A. Camplani
You can also search for this author in PubMed Google Scholar
- V. Canale
You can also search for this author in PubMed Google Scholar
- A. Canesse
You can also search for this author in PubMed Google Scholar
- M. Cano Bret
You can also search for this author in PubMed Google Scholar
- J. Cantero
You can also search for this author in PubMed Google Scholar
- Y. Cao
You can also search for this author in PubMed Google Scholar
- F. Capocasa
You can also search for this author in PubMed Google Scholar
- M. Capua
You can also search for this author in PubMed Google Scholar
- A. Carbone
You can also search for this author in PubMed Google Scholar
- R. Cardarelli
You can also search for this author in PubMed Google Scholar
- J. C. J. Cardenas
You can also search for this author in PubMed Google Scholar
- F. Cardillo
You can also search for this author in PubMed Google Scholar
- T. Carli
You can also search for this author in PubMed Google Scholar
- G. Carlino
You can also search for this author in PubMed Google Scholar
- J. I. Carlotto
You can also search for this author in PubMed Google Scholar
- B. T. Carlson
You can also search for this author in PubMed Google Scholar
- E. M. Carlson
You can also search for this author in PubMed Google Scholar
- L. Carminati
You can also search for this author in PubMed Google Scholar
- M. Carnesale
You can also search for this author in PubMed Google Scholar
- S. Caron
You can also search for this author in PubMed Google Scholar
- E. Carquin
You can also search for this author in PubMed Google Scholar
- S. Carrá
You can also search for this author in PubMed Google Scholar
- G. Carratta
You can also search for this author in PubMed Google Scholar
- F. Carrio Argos
You can also search for this author in PubMed Google Scholar
- J. W. S. Carter
You can also search for this author in PubMed Google Scholar
- T. M. Carter
You can also search for this author in PubMed Google Scholar
- M. P. Casado
You can also search for this author in PubMed Google Scholar
- A. F. Casha
You can also search for this author in PubMed Google Scholar
- E. G. Castiglia
You can also search for this author in PubMed Google Scholar
- F. L. Castillo
You can also search for this author in PubMed Google Scholar
- L. Castillo Garcia
You can also search for this author in PubMed Google Scholar
- V. Castillo Gimenez
You can also search for this author in PubMed Google Scholar
- N. F. Castro
You can also search for this author in PubMed Google Scholar
- A. Catinaccio
You can also search for this author in PubMed Google Scholar
- J. R. Catmore
You can also search for this author in PubMed Google Scholar
- V. Cavaliere
You can also search for this author in PubMed Google Scholar
- N. Cavalli
You can also search for this author in PubMed Google Scholar
- V. Cavasinni
You can also search for this author in PubMed Google Scholar
- E. Celebi
You can also search for this author in PubMed Google Scholar
- F. Celli
You can also search for this author in PubMed Google Scholar
- M. S. Centonze
You can also search for this author in PubMed Google Scholar
- K. Cerny
You can also search for this author in PubMed Google Scholar
- A. S. Cerqueira
You can also search for this author in PubMed Google Scholar
- A. Cerri
You can also search for this author in PubMed Google Scholar
- L. Cerrito
You can also search for this author in PubMed Google Scholar
- F. Cerutti
You can also search for this author in PubMed Google Scholar
- A. Cervelli
You can also search for this author in PubMed Google Scholar
- S. A. Cetin
You can also search for this author in PubMed Google Scholar
- Z. Chadi
You can also search for this author in PubMed Google Scholar
- D. Chakraborty
You can also search for this author in PubMed Google Scholar
- M. Chala
You can also search for this author in PubMed Google Scholar
- J. Chan
You can also search for this author in PubMed Google Scholar
- W. Y. Chan
You can also search for this author in PubMed Google Scholar
- J. D. Chapman
You can also search for this author in PubMed Google Scholar
- B. Chargeishvili
You can also search for this author in PubMed Google Scholar
- D. G. Charlton
You can also search for this author in PubMed Google Scholar
- T. P. Charman
You can also search for this author in PubMed Google Scholar
- M. Chatterjee
You can also search for this author in PubMed Google Scholar
- S. Chekanov
You can also search for this author in PubMed Google Scholar
- S. V. Chekulaev
You can also search for this author in PubMed Google Scholar
- G. A. Chelkov
You can also search for this author in PubMed Google Scholar
- A. Chen
You can also search for this author in PubMed Google Scholar
- B. Chen
You can also search for this author in PubMed Google Scholar
- B. Chen
You can also search for this author in PubMed Google Scholar
- H. Chen
You can also search for this author in PubMed Google Scholar
- H. Chen
You can also search for this author in PubMed Google Scholar
- J. Chen
You can also search for this author in PubMed Google Scholar
- J. Chen
You can also search for this author in PubMed Google Scholar
- S. Chen
You can also search for this author in PubMed Google Scholar
- S. J. Chen
You can also search for this author in PubMed Google Scholar
- X. Chen
You can also search for this author in PubMed Google Scholar
- X. Chen
You can also search for this author in PubMed Google Scholar
- Y. Chen
You can also search for this author in PubMed Google Scholar
- C. L. Cheng
You can also search for this author in PubMed Google Scholar
- H. C. Cheng
You can also search for this author in PubMed Google Scholar
- S. Cheong
You can also search for this author in PubMed Google Scholar
- A. Cheplakov
You can also search for this author in PubMed Google Scholar
- E. Cheremushkina
You can also search for this author in PubMed Google Scholar
- E. Cherepanova
You can also search for this author in PubMed Google Scholar
- R. Cherkaoui El Moursli
You can also search for this author in PubMed Google Scholar
- E. Cheu
You can also search for this author in PubMed Google Scholar
- K. Cheung
You can also search for this author in PubMed Google Scholar
- L. Chevalier
You can also search for this author in PubMed Google Scholar
- V. Chiarella
You can also search for this author in PubMed Google Scholar
- G. Chiarelli
You can also search for this author in PubMed Google Scholar
- N. Chiedde
You can also search for this author in PubMed Google Scholar
- G. Chiodini
You can also search for this author in PubMed Google Scholar
- A. S. Chisholm
You can also search for this author in PubMed Google Scholar
- A. Chitan
You can also search for this author in PubMed Google Scholar
- M. Chitishvili
You can also search for this author in PubMed Google Scholar
- Y. H. Chiu
You can also search for this author in PubMed Google Scholar
- M. V. Chizhov
You can also search for this author in PubMed Google Scholar
- K. Choi
You can also search for this author in PubMed Google Scholar
- A. R. Chomont
You can also search for this author in PubMed Google Scholar
- Y. Chou
You can also search for this author in PubMed Google Scholar
- E. Y. S. Chow
You can also search for this author in PubMed Google Scholar
- T. Chowdhury
You can also search for this author in PubMed Google Scholar
- L. D. Christopher
You can also search for this author in PubMed Google Scholar
- K. L. Chu
You can also search for this author in PubMed Google Scholar
- M. C. Chu
You can also search for this author in PubMed Google Scholar
- X. Chu
You can also search for this author in PubMed Google Scholar
- J. Chudoba
You can also search for this author in PubMed Google Scholar
- J. J. Chwastowski
You can also search for this author in PubMed Google Scholar
- D. Cieri
You can also search for this author in PubMed Google Scholar
- K. M. Ciesla
You can also search for this author in PubMed Google Scholar
- V. Cindro
You can also search for this author in PubMed Google Scholar
- A. Ciocio
You can also search for this author in PubMed Google Scholar
- F. Cirotto
You can also search for this author in PubMed Google Scholar
- Z. H. Citron
You can also search for this author in PubMed Google Scholar
- M. Citterio
You can also search for this author in PubMed Google Scholar
- D. A. Ciubotaru
You can also search for this author in PubMed Google Scholar
- B. M. Ciungu
You can also search for this author in PubMed Google Scholar
- A. Clark
You can also search for this author in PubMed Google Scholar
- P. J. Clark
You can also search for this author in PubMed Google Scholar
- J. M. Clavijo Columbie
You can also search for this author in PubMed Google Scholar
- S. E. Clawson
You can also search for this author in PubMed Google Scholar
- C. Clement
You can also search for this author in PubMed Google Scholar
- J. Clercx
You can also search for this author in PubMed Google Scholar
- L. Clissa
You can also search for this author in PubMed Google Scholar
- Y. Coadou
You can also search for this author in PubMed Google Scholar
- M. Cobal
You can also search for this author in PubMed Google Scholar
- A. Coccaro
You can also search for this author in PubMed Google Scholar
- R. F. Coelho Barrue
You can also search for this author in PubMed Google Scholar
- R. Coelho Lopes De Sa
You can also search for this author in PubMed Google Scholar
- S. Coelli
You can also search for this author in PubMed Google Scholar
- H. Cohen
You can also search for this author in PubMed Google Scholar
- A. E. C. Coimbra
You can also search for this author in PubMed Google Scholar
- B. Cole
You can also search for this author in PubMed Google Scholar
- J. Collot
You can also search for this author in PubMed Google Scholar
- P. Conde Muiño
You can also search for this author in PubMed Google Scholar
- M. P. Connell
You can also search for this author in PubMed Google Scholar
- S. H. Connell
You can also search for this author in PubMed Google Scholar
- I. A. Connelly
You can also search for this author in PubMed Google Scholar
- E. I. Conroy
You can also search for this author in PubMed Google Scholar
- F. Conventi
You can also search for this author in PubMed Google Scholar
- H. G. Cooke
You can also search for this author in PubMed Google Scholar
- A. M. Cooper-Sarkar
You can also search for this author in PubMed Google Scholar
- F. Cormier
You can also search for this author in PubMed Google Scholar
- L. D. Corpe
You can also search for this author in PubMed Google Scholar
- M. Corradi
You can also search for this author in PubMed Google Scholar
- E. E. Corrigan
You can also search for this author in PubMed Google Scholar
- F. Corriveau
You can also search for this author in PubMed Google Scholar
- A. Cortes-Gonzalez
You can also search for this author in PubMed Google Scholar
- M. J. Costa
You can also search for this author in PubMed Google Scholar
- F. Costanza
You can also search for this author in PubMed Google Scholar
- D. Costanzo
You can also search for this author in PubMed Google Scholar
- B. M. Cote
You can also search for this author in PubMed Google Scholar
- G. Cowan
You can also search for this author in PubMed Google Scholar
- J. W. Cowley
You can also search for this author in PubMed Google Scholar
- K. Cranmer
You can also search for this author in PubMed Google Scholar
- S. Crépé-Renaudin
You can also search for this author in PubMed Google Scholar
- F. Crescioli
You can also search for this author in PubMed Google Scholar
- M. Cristinziani
You can also search for this author in PubMed Google Scholar
- M. Cristoforetti
You can also search for this author in PubMed Google Scholar
- V. Croft
You can also search for this author in PubMed Google Scholar
- G. Crosetti
You can also search for this author in PubMed Google Scholar
- A. Cueto
You can also search for this author in PubMed Google Scholar
- T. Cuhadar Donszelmann
You can also search for this author in PubMed Google Scholar
- H. Cui
You can also search for this author in PubMed Google Scholar
- Z. Cui
You can also search for this author in PubMed Google Scholar
- W. R. Cunningham
You can also search for this author in PubMed Google Scholar
- F. Curcio
You can also search for this author in PubMed Google Scholar
- P. Czodrowski
You can also search for this author in PubMed Google Scholar
- M. M. Czurylo
You can also search for this author in PubMed Google Scholar
- M. J. Da Cunha Sargedas De Sousa
You can also search for this author in PubMed Google Scholar
- J. V. Da Fonseca Pinto
You can also search for this author in PubMed Google Scholar
- C. Da Via
You can also search for this author in PubMed Google Scholar
- W. Dabrowski
You can also search for this author in PubMed Google Scholar
- T. Dado
You can also search for this author in PubMed Google Scholar
- S. Dahbi
You can also search for this author in PubMed Google Scholar
- T. Dai
You can also search for this author in PubMed Google Scholar
- C. Dallapiccola
You can also search for this author in PubMed Google Scholar
- M. Dam
You can also search for this author in PubMed Google Scholar
- G. D’amen
You can also search for this author in PubMed Google Scholar
- V. D’Amico
You can also search for this author in PubMed Google Scholar
- J. Damp
You can also search for this author in PubMed Google Scholar
- J. R. Dandoy
You can also search for this author in PubMed Google Scholar
- M. F. Daneri
You can also search for this author in PubMed Google Scholar
- M. Danninger
You can also search for this author in PubMed Google Scholar
- V. Dao
You can also search for this author in PubMed Google Scholar
- G. Darbo
You can also search for this author in PubMed Google Scholar
- S. Darmora
You can also search for this author in PubMed Google Scholar
- S. J. Das
You can also search for this author in PubMed Google Scholar
- S. D’Auria
You can also search for this author in PubMed Google Scholar
- C. David
You can also search for this author in PubMed Google Scholar
- T. Davidek
You can also search for this author in PubMed Google Scholar
- D. R. Davis
You can also search for this author in PubMed Google Scholar
- B. Davis-Purcell
You can also search for this author in PubMed Google Scholar
- I. Dawson
You can also search for this author in PubMed Google Scholar
- K. De
You can also search for this author in PubMed Google Scholar
- R. De Asmundis
You can also search for this author in PubMed Google Scholar
- M. De Beurs
You can also search for this author in PubMed Google Scholar
- N. De Biase
You can also search for this author in PubMed Google Scholar
- S. De Castro
You can also search for this author in PubMed Google Scholar
- N. De Groot
You can also search for this author in PubMed Google Scholar
- P. de Jong
You can also search for this author in PubMed Google Scholar
- H. De la Torre
You can also search for this author in PubMed Google Scholar
- A. De Maria
You can also search for this author in PubMed Google Scholar
- A. De Salvo
You can also search for this author in PubMed Google Scholar
- U. De Sanctis
You can also search for this author in PubMed Google Scholar
- A. De Santo
You can also search for this author in PubMed Google Scholar
- J. B. De Vivie De Regie
You can also search for this author in PubMed Google Scholar
- D. V. Dedovich
You can also search for this author in PubMed Google Scholar
- J. Degens
You can also search for this author in PubMed Google Scholar
- A. M. Deiana
You can also search for this author in PubMed Google Scholar
- F. Del Corso
You can also search for this author in PubMed Google Scholar
- J. Del Peso
You can also search for this author in PubMed Google Scholar
- F. Del Rio
You can also search for this author in PubMed Google Scholar
- F. Deliot
You can also search for this author in PubMed Google Scholar
- C. M. Delitzsch
You can also search for this author in PubMed Google Scholar
- M. Della Pietra
You can also search for this author in PubMed Google Scholar
- D. Della Volpe
You can also search for this author in PubMed Google Scholar
- A. Dell’Acqua
You can also search for this author in PubMed Google Scholar
- L. Dell’Asta
You can also search for this author in PubMed Google Scholar
- M. Delmastro
You can also search for this author in PubMed Google Scholar
- P. A. Delsart
You can also search for this author in PubMed Google Scholar
- S. Demers
You can also search for this author in PubMed Google Scholar
- M. Demichev
You can also search for this author in PubMed Google Scholar
- S. P. Denisov
You can also search for this author in PubMed Google Scholar
- L. D’Eramo
You can also search for this author in PubMed Google Scholar
- D. Derendarz
You can also search for this author in PubMed Google Scholar
- F. Derue
You can also search for this author in PubMed Google Scholar
- P. Dervan
You can also search for this author in PubMed Google Scholar
- K. Desch
You can also search for this author in PubMed Google Scholar
- K. Dette
You can also search for this author in PubMed Google Scholar
- C. Deutsch
You can also search for this author in PubMed Google Scholar
- F. A. Di Bello
You can also search for this author in PubMed Google Scholar
- A. Di Ciaccio
You can also search for this author in PubMed Google Scholar
- L. Di Ciaccio
You can also search for this author in PubMed Google Scholar
- A. Di Domenico
You can also search for this author in PubMed Google Scholar
- C. Di Donato
You can also search for this author in PubMed Google Scholar
- A. Di Girolamo
You can also search for this author in PubMed Google Scholar
- G. Di Gregorio
You can also search for this author in PubMed Google Scholar
- A. Di Luca
You can also search for this author in PubMed Google Scholar
- B. Di Micco
You can also search for this author in PubMed Google Scholar
- R. Di Nardo
You can also search for this author in PubMed Google Scholar
- C. Diaconu
You can also search for this author in PubMed Google Scholar
- F. A. Dias
You can also search for this author in PubMed Google Scholar
- T. Dias Do Vale
You can also search for this author in PubMed Google Scholar
- M. A. Diaz
You can also search for this author in PubMed Google Scholar
- F. G. Diaz Capriles
You can also search for this author in PubMed Google Scholar
- M. Didenko
You can also search for this author in PubMed Google Scholar
- E. B. Diehl
You can also search for this author in PubMed Google Scholar
- L. Diehl
You can also search for this author in PubMed Google Scholar
- S. Díez Cornell
You can also search for this author in PubMed Google Scholar
- C. Diez Pardos
You can also search for this author in PubMed Google Scholar
- C. Dimitriadi
You can also search for this author in PubMed Google Scholar
- A. Dimitrievska
You can also search for this author in PubMed Google Scholar
- J. Dingfelder
You can also search for this author in PubMed Google Scholar
- I.-M. Dinu
You can also search for this author in PubMed Google Scholar
- S. J. Dittmeier
You can also search for this author in PubMed Google Scholar
- F. Dittus
You can also search for this author in PubMed Google Scholar
- F. Djama
You can also search for this author in PubMed Google Scholar
- T. Djobava
You can also search for this author in PubMed Google Scholar
- J. I. Djuvsland
You can also search for this author in PubMed Google Scholar
- C. Doglioni
You can also search for this author in PubMed Google Scholar
- J. Dolejsi
You can also search for this author in PubMed Google Scholar
- Z. Dolezal
You can also search for this author in PubMed Google Scholar
- M. Donadelli
You can also search for this author in PubMed Google Scholar
- B. Dong
You can also search for this author in PubMed Google Scholar
- J. Donini
You can also search for this author in PubMed Google Scholar
- A. D’Onofrio
You can also search for this author in PubMed Google Scholar
- M. D’Onofrio
You can also search for this author in PubMed Google Scholar
- J. Dopke
You can also search for this author in PubMed Google Scholar
- A. Doria
You can also search for this author in PubMed Google Scholar
- M. T. Dova
You can also search for this author in PubMed Google Scholar
- A. T. Doyle
You can also search for this author in PubMed Google Scholar
- M. A. Draguet
You can also search for this author in PubMed Google Scholar
- E. Drechsler
You can also search for this author in PubMed Google Scholar
- E. Dreyer
You can also search for this author in PubMed Google Scholar
- I. Drivas-koulouris
You can also search for this author in PubMed Google Scholar
- A. S. Drobac
You can also search for this author in PubMed Google Scholar
- M. Drozdova
You can also search for this author in PubMed Google Scholar
- D. Du
You can also search for this author in PubMed Google Scholar
- T. A. du Pree
You can also search for this author in PubMed Google Scholar
- F. Dubinin
You can also search for this author in PubMed Google Scholar
- M. Dubovsky
You can also search for this author in PubMed Google Scholar
- E. Duchovni
You can also search for this author in PubMed Google Scholar
- G. Duckeck
You can also search for this author in PubMed Google Scholar
- O. A. Ducu
You can also search for this author in PubMed Google Scholar
- D. Duda
You can also search for this author in PubMed Google Scholar
- A. Dudarev
You can also search for this author in PubMed Google Scholar
- E. R. Duden
You can also search for this author in PubMed Google Scholar
- M. D’uffizi
You can also search for this author in PubMed Google Scholar
- L. Duflot
You can also search for this author in PubMed Google Scholar
- M. Dührssen
You can also search for this author in PubMed Google Scholar
- C. Dülsen
You can also search for this author in PubMed Google Scholar
- A. E. Dumitriu
You can also search for this author in PubMed Google Scholar
- M. Dunford
You can also search for this author in PubMed Google Scholar
- S. Dungs
You can also search for this author in PubMed Google Scholar
- K. Dunne
You can also search for this author in PubMed Google Scholar
- A. Duperrin
You can also search for this author in PubMed Google Scholar
- H. Duran Yildiz
You can also search for this author in PubMed Google Scholar
- M. Düren
You can also search for this author in PubMed Google Scholar
- A. Durglishvili
You can also search for this author in PubMed Google Scholar
- B. L. Dwyer
You can also search for this author in PubMed Google Scholar
- G. I. Dyckes
You can also search for this author in PubMed Google Scholar
- M. Dyndal
You can also search for this author in PubMed Google Scholar
- S. Dysch
You can also search for this author in PubMed Google Scholar
- B. S. Dziedzic
You can also search for this author in PubMed Google Scholar
- Z. O. Earnshaw
You can also search for this author in PubMed Google Scholar
- B. Eckerova
You can also search for this author in PubMed Google Scholar
- S. Eggebrecht
You can also search for this author in PubMed Google Scholar
- M. G. Eggleston
You can also search for this author in PubMed Google Scholar
- E. Egidio Purcino De Souza
You can also search for this author in PubMed Google Scholar
- L. F. Ehrke
You can also search for this author in PubMed Google Scholar
- G. Eigen
You can also search for this author in PubMed Google Scholar
- K. Einsweiler
You can also search for this author in PubMed Google Scholar
- T. Ekelof
You can also search for this author in PubMed Google Scholar
- P. A. Ekman
You can also search for this author in PubMed Google Scholar
- Y. El Ghazali
You can also search for this author in PubMed Google Scholar
- H. El Jarrari
You can also search for this author in PubMed Google Scholar
- A. El Moussaouy
You can also search for this author in PubMed Google Scholar
- V. Ellajosyula
You can also search for this author in PubMed Google Scholar
- M. Ellert
You can also search for this author in PubMed Google Scholar
- F. Ellinghaus
You can also search for this author in PubMed Google Scholar
- A. A. Elliot
You can also search for this author in PubMed Google Scholar
- N. Ellis
You can also search for this author in PubMed Google Scholar
- J. Elmsheuser
You can also search for this author in PubMed Google Scholar
- M. Elsing
You can also search for this author in PubMed Google Scholar
- D. Emeliyanov
You can also search for this author in PubMed Google Scholar
- A. Emerman
You can also search for this author in PubMed Google Scholar
- Y. Enari
You can also search for this author in PubMed Google Scholar
- I. Ene
You can also search for this author in PubMed Google Scholar
- S. Epari
You can also search for this author in PubMed Google Scholar
- J. Erdmann
You can also search for this author in PubMed Google Scholar
- P. A. Erland
You can also search for this author in PubMed Google Scholar
- M. Errenst
You can also search for this author in PubMed Google Scholar
- M. Escalier
You can also search for this author in PubMed Google Scholar
- C. Escobar
You can also search for this author in PubMed Google Scholar
- E. Etzion
You can also search for this author in PubMed Google Scholar
- G. Evans
You can also search for this author in PubMed Google Scholar
- H. Evans
You can also search for this author in PubMed Google Scholar
- M. O. Evans
You can also search for this author in PubMed Google Scholar
- A. Ezhilov
You can also search for this author in PubMed Google Scholar
- S. Ezzarqtouni
You can also search for this author in PubMed Google Scholar
- F. Fabbri
You can also search for this author in PubMed Google Scholar
- L. Fabbri
You can also search for this author in PubMed Google Scholar
- G. Facini
You can also search for this author in PubMed Google Scholar
- V. Fadeyev
You can also search for this author in PubMed Google Scholar
- R. M. Fakhrutdinov
You can also search for this author in PubMed Google Scholar
- S. Falciano
You can also search for this author in PubMed Google Scholar
- L. F. Falda Ulhoa Coelho
You can also search for this author in PubMed Google Scholar
- P. J. Falke
You can also search for this author in PubMed Google Scholar
- S. Falke
You can also search for this author in PubMed Google Scholar
- J. Faltova
You can also search for this author in PubMed Google Scholar
- Y. Fan
You can also search for this author in PubMed Google Scholar
- Y. Fang
You can also search for this author in PubMed Google Scholar
- G. Fanourakis
You can also search for this author in PubMed Google Scholar
- M. Fanti
You can also search for this author in PubMed Google Scholar
- M. Faraj
You can also search for this author in PubMed Google Scholar
- Z. Farazpay
You can also search for this author in PubMed Google Scholar
- A. Farbin
You can also search for this author in PubMed Google Scholar
- A. Farilla
You can also search for this author in PubMed Google Scholar
- T. Farooque
You can also search for this author in PubMed Google Scholar
- S. M. Farrington
You can also search for this author in PubMed Google Scholar
- F. Fassi
You can also search for this author in PubMed Google Scholar
- D. Fassouliotis
You can also search for this author in PubMed Google Scholar
- M. Faucci Giannelli
You can also search for this author in PubMed Google Scholar
- W. J. Fawcett
You can also search for this author in PubMed Google Scholar
- L. Fayard
You can also search for this author in PubMed Google Scholar
- P. Federicova
You can also search for this author in PubMed Google Scholar
- O. L. Fedin
You can also search for this author in PubMed Google Scholar
- G. Fedotov
You can also search for this author in PubMed Google Scholar
- M. Feickert
You can also search for this author in PubMed Google Scholar
- L. Feligioni
You can also search for this author in PubMed Google Scholar
- A. Fell
You can also search for this author in PubMed Google Scholar
- D. E. Fellers
You can also search for this author in PubMed Google Scholar
- C. Feng
You can also search for this author in PubMed Google Scholar
- M. Feng
You can also search for this author in PubMed Google Scholar
- Z. Feng
You can also search for this author in PubMed Google Scholar
- M. J. Fenton
You can also search for this author in PubMed Google Scholar
- A. B. Fenyuk
You can also search for this author in PubMed Google Scholar
- L. Ferencz
You can also search for this author in PubMed Google Scholar
- R. A. M. Ferguson
You can also search for this author in PubMed Google Scholar
- S. I. Fernandez Luengo
You can also search for this author in PubMed Google Scholar
- J. Ferrando
You can also search for this author in PubMed Google Scholar
- A. Ferrari
You can also search for this author in PubMed Google Scholar
- P. Ferrari
You can also search for this author in PubMed Google Scholar
- R. Ferrari
You can also search for this author in PubMed Google Scholar
- D. Ferrere
You can also search for this author in PubMed Google Scholar
- C. Ferretti
You can also search for this author in PubMed Google Scholar
- F. Fiedler
You can also search for this author in PubMed Google Scholar
- A. Filipčič
You can also search for this author in PubMed Google Scholar
- E. K. Filmer
You can also search for this author in PubMed Google Scholar
- F. Filthaut
You can also search for this author in PubMed Google Scholar
- M. C. N. Fiolhais
You can also search for this author in PubMed Google Scholar
- L. Fiorini
You can also search for this author in PubMed Google Scholar
- F. Fischer
You can also search for this author in PubMed Google Scholar
- W. C. Fisher
You can also search for this author in PubMed Google Scholar
- T. Fitschen
You can also search for this author in PubMed Google Scholar
- I. Fleck
You can also search for this author in PubMed Google Scholar
- P. Fleischmann
You can also search for this author in PubMed Google Scholar
- T. Flick
You can also search for this author in PubMed Google Scholar
- L. Flores
You can also search for this author in PubMed Google Scholar
- M. Flores
You can also search for this author in PubMed Google Scholar
- L. R. Flores Castillo
You can also search for this author in PubMed Google Scholar
- F. M. Follega
You can also search for this author in PubMed Google Scholar
- N. Fomin
You can also search for this author in PubMed Google Scholar
- J. H. Foo
You can also search for this author in PubMed Google Scholar
- B. C. Forland
You can also search for this author in PubMed Google Scholar
- A. Formica
You can also search for this author in PubMed Google Scholar
- A. C. Forti
You can also search for this author in PubMed Google Scholar
- E. Fortin
You can also search for this author in PubMed Google Scholar
- A. W. Fortman
You can also search for this author in PubMed Google Scholar
- M. G. Foti
You can also search for this author in PubMed Google Scholar
- L. Fountas
You can also search for this author in PubMed Google Scholar
- D. Fournier
You can also search for this author in PubMed Google Scholar
- H. Fox
You can also search for this author in PubMed Google Scholar
- P. Francavilla
You can also search for this author in PubMed Google Scholar
- S. Francescato
You can also search for this author in PubMed Google Scholar
- S. Franchellucci
You can also search for this author in PubMed Google Scholar
- M. Franchini
You can also search for this author in PubMed Google Scholar
- S. Franchino
You can also search for this author in PubMed Google Scholar
- D. Francis
You can also search for this author in PubMed Google Scholar
- L. Franco
You can also search for this author in PubMed Google Scholar
- L. Franconi
You can also search for this author in PubMed Google Scholar
- M. Franklin
You can also search for this author in PubMed Google Scholar
- G. Frattari
You can also search for this author in PubMed Google Scholar
- A. C. Freegard
You can also search for this author in PubMed Google Scholar
- P. M. Freeman
You can also search for this author in PubMed Google Scholar
- W. S. Freund
You can also search for this author in PubMed Google Scholar
- N. Fritzsche
You can also search for this author in PubMed Google Scholar
- A. Froch
You can also search for this author in PubMed Google Scholar
- D. Froidevaux
You can also search for this author in PubMed Google Scholar
- J. A. Frost
You can also search for this author in PubMed Google Scholar
- Y. Fu
You can also search for this author in PubMed Google Scholar
- M. Fujimoto
You can also search for this author in PubMed Google Scholar
- E. Fullana Torregrosa
You can also search for this author in PubMed Google Scholar
- J. Fuster
You can also search for this author in PubMed Google Scholar
- A. Gabrielli
You can also search for this author in PubMed Google Scholar
- A. Gabrielli
You can also search for this author in PubMed Google Scholar
- P. Gadow
You can also search for this author in PubMed Google Scholar
- G. Gagliardi
You can also search for this author in PubMed Google Scholar
- L. G. Gagnon
You can also search for this author in PubMed Google Scholar
- G. E. Gallardo
You can also search for this author in PubMed Google Scholar
- E. J. Gallas
You can also search for this author in PubMed Google Scholar
- B. J. Gallop
You can also search for this author in PubMed Google Scholar
- R. Gamboa Goni
You can also search for this author in PubMed Google Scholar
- K. K. Gan
You can also search for this author in PubMed Google Scholar
- S. Ganguly
You can also search for this author in PubMed Google Scholar
- J. Gao
You can also search for this author in PubMed Google Scholar
- Y. Gao
You can also search for this author in PubMed Google Scholar
- F. M. Garay Walls
You can also search for this author in PubMed Google Scholar
- B. Garcia
You can also search for this author in PubMed Google Scholar
- C. García
You can also search for this author in PubMed Google Scholar
- J. E. García Navarro
You can also search for this author in PubMed Google Scholar
- M. Garcia-Sciveres
You can also search for this author in PubMed Google Scholar
- R. W. Gardner
You can also search for this author in PubMed Google Scholar
- D. Garg
You can also search for this author in PubMed Google Scholar
- R. B. Garg
You can also search for this author in PubMed Google Scholar
- C. A. Garner
You can also search for this author in PubMed Google Scholar
- V. Garonne
You can also search for this author in PubMed Google Scholar
- S. J. Gasiorowski
You can also search for this author in PubMed Google Scholar
- P. Gaspar
You can also search for this author in PubMed Google Scholar
- G. Gaudio
You can also search for this author in PubMed Google Scholar
- V. Gautam
You can also search for this author in PubMed Google Scholar
- P. Gauzzi
You can also search for this author in PubMed Google Scholar
- I. L. Gavrilenko
You can also search for this author in PubMed Google Scholar
- A. Gavrilyuk
You can also search for this author in PubMed Google Scholar
- C. Gay
You can also search for this author in PubMed Google Scholar
- G. Gaycken
You can also search for this author in PubMed Google Scholar
- E. N. Gazis
You can also search for this author in PubMed Google Scholar
- A. A. Geanta
You can also search for this author in PubMed Google Scholar
- C. M. Gee
You can also search for this author in PubMed Google Scholar
- J. Geisen
You can also search for this author in PubMed Google Scholar
- C. Gemme
You can also search for this author in PubMed Google Scholar
- M. H. Genest
You can also search for this author in PubMed Google Scholar
- S. Gentile
You can also search for this author in PubMed Google Scholar
- S. George
You can also search for this author in PubMed Google Scholar
- W. F. George
You can also search for this author in PubMed Google Scholar
- T. Geralis
You can also search for this author in PubMed Google Scholar
- L. O. Gerlach
You can also search for this author in PubMed Google Scholar
- P. Gessinger-Befurt
You can also search for this author in PubMed Google Scholar
- M. E. Geyik
You can also search for this author in PubMed Google Scholar
- M. Ghasemi Bostanabad
You can also search for this author in PubMed Google Scholar
- M. Ghneimat
You can also search for this author in PubMed Google Scholar
- K. Ghorbanian
You can also search for this author in PubMed Google Scholar
- A. Ghosal
You can also search for this author in PubMed Google Scholar
- A. Ghosh
You can also search for this author in PubMed Google Scholar
- A. Ghosh
You can also search for this author in PubMed Google Scholar
- B. Giacobbe
You can also search for this author in PubMed Google Scholar
- S. Giagu
You can also search for this author in PubMed Google Scholar
- P. Giannetti
You can also search for this author in PubMed Google Scholar
- A. Giannini
You can also search for this author in PubMed Google Scholar
- S. M. Gibson
You can also search for this author in PubMed Google Scholar
- M. Gignac
You can also search for this author in PubMed Google Scholar
- D. T. Gil
You can also search for this author in PubMed Google Scholar
- A. K. Gilbert
You can also search for this author in PubMed Google Scholar
- B. J. Gilbert
You can also search for this author in PubMed Google Scholar
- D. Gillberg
You can also search for this author in PubMed Google Scholar
- G. Gilles
You can also search for this author in PubMed Google Scholar
- N. E. K. Gillwald
You can also search for this author in PubMed Google Scholar
- L. Ginabat
You can also search for this author in PubMed Google Scholar
- D. M. Gingrich
You can also search for this author in PubMed Google Scholar
- M. P. Giordani
You can also search for this author in PubMed Google Scholar
- P. F. Giraud
You can also search for this author in PubMed Google Scholar
- G. Giugliarelli
You can also search for this author in PubMed Google Scholar
- D. Giugni
You can also search for this author in PubMed Google Scholar
- F. Giuli
You can also search for this author in PubMed Google Scholar
- I. Gkialas
You can also search for this author in PubMed Google Scholar
- L. K. Gladilin
You can also search for this author in PubMed Google Scholar
- C. Glasman
You can also search for this author in PubMed Google Scholar
- G. R. Gledhill
You can also search for this author in PubMed Google Scholar
- M. Glisic
You can also search for this author in PubMed Google Scholar
- I. Gnesi
You can also search for this author in PubMed Google Scholar
- Y. Go
You can also search for this author in PubMed Google Scholar
- M. Goblirsch-Kolb
You can also search for this author in PubMed Google Scholar
- B. Gocke
You can also search for this author in PubMed Google Scholar
- D. Godin
You can also search for this author in PubMed Google Scholar
- B. Gokturk
You can also search for this author in PubMed Google Scholar
- S. Goldfarb
You can also search for this author in PubMed Google Scholar
- T. Golling
You can also search for this author in PubMed Google Scholar
- M. G. D. Gololo
You can also search for this author in PubMed Google Scholar
- D. Golubkov
You can also search for this author in PubMed Google Scholar
- J. P. Gombas
You can also search for this author in PubMed Google Scholar
- A. Gomes
You can also search for this author in PubMed Google Scholar
- G. Gomes Da Silva
You can also search for this author in PubMed Google Scholar
- A. J. Gomez Delegido
You can also search for this author in PubMed Google Scholar
- R. Goncalves Gama
You can also search for this author in PubMed Google Scholar
- R. Gonçalo
You can also search for this author in PubMed Google Scholar
- G. Gonella
You can also search for this author in PubMed Google Scholar
- L. Gonella
You can also search for this author in PubMed Google Scholar
- A. Gongadze
You can also search for this author in PubMed Google Scholar
- F. Gonnella
You can also search for this author in PubMed Google Scholar
- J. L. Gonski
You can also search for this author in PubMed Google Scholar
- R. Y. González Andana
You can also search for this author in PubMed Google Scholar
- S. González de la Hoz
You can also search for this author in PubMed Google Scholar
- S. Gonzalez Fernandez
You can also search for this author in PubMed Google Scholar
- R. Gonzalez Lopez
You can also search for this author in PubMed Google Scholar
- C. Gonzalez Renteria
You can also search for this author in PubMed Google Scholar
- R. Gonzalez Suarez
You can also search for this author in PubMed Google Scholar
- S. Gonzalez-Sevilla
You can also search for this author in PubMed Google Scholar
- G. R. Gonzalvo Rodriguez
You can also search for this author in PubMed Google Scholar
- L. Goossens
You can also search for this author in PubMed Google Scholar
- N. A. Gorasia
You can also search for this author in PubMed Google Scholar
- P. A. Gorbounov
You can also search for this author in PubMed Google Scholar
- B. Gorini
You can also search for this author in PubMed Google Scholar
- E. Gorini
You can also search for this author in PubMed Google Scholar
- A. Gorišek
You can also search for this author in PubMed Google Scholar
- A. T. Goshaw
You can also search for this author in PubMed Google Scholar
- M. I. Gostkin
You can also search for this author in PubMed Google Scholar
- S. Goswami
You can also search for this author in PubMed Google Scholar
- C. A. Gottardo
You can also search for this author in PubMed Google Scholar
- M. Gouighri
You can also search for this author in PubMed Google Scholar
- V. Goumarre
You can also search for this author in PubMed Google Scholar
- A. G. Goussiou
You can also search for this author in PubMed Google Scholar
- N. Govender
You can also search for this author in PubMed Google Scholar
- C. Goy
You can also search for this author in PubMed Google Scholar
- I. Grabowska-Bold
You can also search for this author in PubMed Google Scholar
- K. Graham
You can also search for this author in PubMed Google Scholar
- E. Gramstad
You can also search for this author in PubMed Google Scholar
- S. Grancagnolo
You can also search for this author in PubMed Google Scholar
- M. Grandi
You can also search for this author in PubMed Google Scholar
- V. Gratchev
You can also search for this author in PubMed Google Scholar
- P. M. Gravila
You can also search for this author in PubMed Google Scholar
- F. G. Gravili
You can also search for this author in PubMed Google Scholar
- H. M. Gray
You can also search for this author in PubMed Google Scholar
- M. Greco
You can also search for this author in PubMed Google Scholar
- C. Grefe
You can also search for this author in PubMed Google Scholar
- I. M. Gregor
You can also search for this author in PubMed Google Scholar
- P. Grenier
You can also search for this author in PubMed Google Scholar
- C. Grieco
You can also search for this author in PubMed Google Scholar
- A. A. Grillo
You can also search for this author in PubMed Google Scholar
- K. Grimm
You can also search for this author in PubMed Google Scholar
- S. Grinstein
You can also search for this author in PubMed Google Scholar
- J. -F. Grivaz
You can also search for this author in PubMed Google Scholar
- E. Gross
You can also search for this author in PubMed Google Scholar
- J. Grosse-Knetter
You can also search for this author in PubMed Google Scholar
- C. Grud
You can also search for this author in PubMed Google Scholar
- J. C. Grundy
You can also search for this author in PubMed Google Scholar
- L. Guan
You can also search for this author in PubMed Google Scholar
- W. Guan
You can also search for this author in PubMed Google Scholar
- C. Gubbels
You can also search for this author in PubMed Google Scholar
- J. G. R. Guerrero Rojas
You can also search for this author in PubMed Google Scholar
- G. Guerrieri
You can also search for this author in PubMed Google Scholar
- F. Guescini
You can also search for this author in PubMed Google Scholar
- R. Gugel
You can also search for this author in PubMed Google Scholar
- J. A. M. Guhit
You can also search for this author in PubMed Google Scholar
- A. Guida
You can also search for this author in PubMed Google Scholar
- T. Guillemin
You can also search for this author in PubMed Google Scholar
- E. Guilloton
You can also search for this author in PubMed Google Scholar
- S. Guindon
You can also search for this author in PubMed Google Scholar
- F. Guo
You can also search for this author in PubMed Google Scholar
- J. Guo
You can also search for this author in PubMed Google Scholar
- L. Guo
You can also search for this author in PubMed Google Scholar
- Y. Guo
You can also search for this author in PubMed Google Scholar
- R. Gupta
You can also search for this author in PubMed Google Scholar
- S. Gurbuz
You can also search for this author in PubMed Google Scholar
- S. S. Gurdasani
You can also search for this author in PubMed Google Scholar
- G. Gustavino
You can also search for this author in PubMed Google Scholar
- M. Guth
You can also search for this author in PubMed Google Scholar
- P. Gutierrez
You can also search for this author in PubMed Google Scholar
- L. F. Gutierrez Zagazeta
You can also search for this author in PubMed Google Scholar
- C. Gutschow
You can also search for this author in PubMed Google Scholar
- C. Guyot
You can also search for this author in PubMed Google Scholar
- C. Gwenlan
You can also search for this author in PubMed Google Scholar
- C. B. Gwilliam
You can also search for this author in PubMed Google Scholar
- E. S. Haaland
You can also search for this author in PubMed Google Scholar
- A. Haas
You can also search for this author in PubMed Google Scholar
- M. Habedank
You can also search for this author in PubMed Google Scholar
- C. Haber
You can also search for this author in PubMed Google Scholar
- H. K. Hadavand
You can also search for this author in PubMed Google Scholar
- A. Hadef
You can also search for this author in PubMed Google Scholar
- S. Hadzic
You can also search for this author in PubMed Google Scholar
- E. H. Haines
You can also search for this author in PubMed Google Scholar
- M. Haleem
You can also search for this author in PubMed Google Scholar
- J. Haley
You can also search for this author in PubMed Google Scholar
- J. J. Hall
You can also search for this author in PubMed Google Scholar
- G. D. Hallewell
You can also search for this author in PubMed Google Scholar
- L. Halser
You can also search for this author in PubMed Google Scholar
- K. Hamano
You can also search for this author in PubMed Google Scholar
- H. Hamdaoui
You can also search for this author in PubMed Google Scholar
- M. Hamer
You can also search for this author in PubMed Google Scholar
- G. N. Hamity
You can also search for this author in PubMed Google Scholar
- J. Han
You can also search for this author in PubMed Google Scholar
- K. Han
You can also search for this author in PubMed Google Scholar
- L. Han
You can also search for this author in PubMed Google Scholar
- L. Han
You can also search for this author in PubMed Google Scholar
- S. Han
You can also search for this author in PubMed Google Scholar
- Y. F. Han
You can also search for this author in PubMed Google Scholar
- K. Hanagaki
You can also search for this author in PubMed Google Scholar
- M. Hance
You can also search for this author in PubMed Google Scholar
- D. A. Hangal
You can also search for this author in PubMed Google Scholar
- H. Hanif
You can also search for this author in PubMed Google Scholar
- M. D. Hank
You can also search for this author in PubMed Google Scholar
- R. Hankache
You can also search for this author in PubMed Google Scholar
- J. B. Hansen
You can also search for this author in PubMed Google Scholar
- J. D. Hansen
You can also search for this author in PubMed Google Scholar
- P. H. Hansen
You can also search for this author in PubMed Google Scholar
- K. Hara
You can also search for this author in PubMed Google Scholar
- D. Harada
You can also search for this author in PubMed Google Scholar
- T. Harenberg
You can also search for this author in PubMed Google Scholar
- S. Harkusha
You can also search for this author in PubMed Google Scholar
- Y. T. Harris
You can also search for this author in PubMed Google Scholar
- N. M. Harrison
You can also search for this author in PubMed Google Scholar
- P. F. Harrison
You can also search for this author in PubMed Google Scholar
- N. M. Hartman
You can also search for this author in PubMed Google Scholar
- N. M. Hartmann
You can also search for this author in PubMed Google Scholar
- Y. Hasegawa
You can also search for this author in PubMed Google Scholar
- A. Hasib
You can also search for this author in PubMed Google Scholar
- S. Haug
You can also search for this author in PubMed Google Scholar
- R. Hauser
You can also search for this author in PubMed Google Scholar
- M. Havranek
You can also search for this author in PubMed Google Scholar
- C. M. Hawkes
You can also search for this author in PubMed Google Scholar
- R. J. Hawkings
You can also search for this author in PubMed Google Scholar
- S. Hayashida
You can also search for this author in PubMed Google Scholar
- D. Hayden
You can also search for this author in PubMed Google Scholar
- C. Hayes
You can also search for this author in PubMed Google Scholar
- R. L. Hayes
You can also search for this author in PubMed Google Scholar
- C. P. Hays
You can also search for this author in PubMed Google Scholar
- J. M. Hays
You can also search for this author in PubMed Google Scholar
- H. S. Hayward
You can also search for this author in PubMed Google Scholar
- F. He
You can also search for this author in PubMed Google Scholar
- Y. He
You can also search for this author in PubMed Google Scholar
- Y. He
You can also search for this author in PubMed Google Scholar
- M. P. Heath
You can also search for this author in PubMed Google Scholar
- N. B. Heatley
You can also search for this author in PubMed Google Scholar
- V. Hedberg
You can also search for this author in PubMed Google Scholar
- A. L. Heggelund
You can also search for this author in PubMed Google Scholar
- N. D. Hehir
You can also search for this author in PubMed Google Scholar
- C. Heidegger
You can also search for this author in PubMed Google Scholar
- K. K. Heidegger
You can also search for this author in PubMed Google Scholar
- W. D. Heidorn
You can also search for this author in PubMed Google Scholar
- J. Heilman
You can also search for this author in PubMed Google Scholar
- S. Heim
You can also search for this author in PubMed Google Scholar
- T. Heim
You can also search for this author in PubMed Google Scholar
- J. G. Heinlein
You can also search for this author in PubMed Google Scholar
- J. J. Heinrich
You can also search for this author in PubMed Google Scholar
- L. Heinrich
You can also search for this author in PubMed Google Scholar
- J. Hejbal
You can also search for this author in PubMed Google Scholar
- L. Helary
You can also search for this author in PubMed Google Scholar
- A. Held
You can also search for this author in PubMed Google Scholar
- S. Hellesund
You can also search for this author in PubMed Google Scholar
- C. M. Helling
You can also search for this author in PubMed Google Scholar
- S. Hellman
You can also search for this author in PubMed Google Scholar
- C. Helsens
You can also search for this author in PubMed Google Scholar
- R. C. W. Henderson
You can also search for this author in PubMed Google Scholar
- L. Henkelmann
You can also search for this author in PubMed Google Scholar
- A. M. Henriques Correia
You can also search for this author in PubMed Google Scholar
- H. Herde
You can also search for this author in PubMed Google Scholar
- Y. Hernández Jiménez
You can also search for this author in PubMed Google Scholar
- L. M. Herrmann
You can also search for this author in PubMed Google Scholar
- T. Herrmann
You can also search for this author in PubMed Google Scholar
- G. Herten
You can also search for this author in PubMed Google Scholar
- R. Hertenberger
You can also search for this author in PubMed Google Scholar
- L. Hervas
You can also search for this author in PubMed Google Scholar
- N. P. Hessey
You can also search for this author in PubMed Google Scholar
- H. Hibi
You can also search for this author in PubMed Google Scholar
- E. Higón-Rodriguez
You can also search for this author in PubMed Google Scholar
- S. J. Hillier
You can also search for this author in PubMed Google Scholar
- I. Hinchliffe
You can also search for this author in PubMed Google Scholar
- F. Hinterkeuser
You can also search for this author in PubMed Google Scholar
- M. Hirose
You can also search for this author in PubMed Google Scholar
- S. Hirose
You can also search for this author in PubMed Google Scholar
- D. Hirschbuehl
You can also search for this author in PubMed Google Scholar
- T. G. Hitchings
You can also search for this author in PubMed Google Scholar
- B. Hiti
You can also search for this author in PubMed Google Scholar
- J. Hobbs
You can also search for this author in PubMed Google Scholar
- R. Hobincu
You can also search for this author in PubMed Google Scholar
- N. Hod
You can also search for this author in PubMed Google Scholar
- M. C. Hodgkinson
You can also search for this author in PubMed Google Scholar
- B. H. Hodkinson
You can also search for this author in PubMed Google Scholar
- A. Hoecker
You can also search for this author in PubMed Google Scholar
- J. Hofer
You can also search for this author in PubMed Google Scholar
- D. Hohn
You can also search for this author in PubMed Google Scholar
- T. Holm
You can also search for this author in PubMed Google Scholar
- M. Holzbock
You can also search for this author in PubMed Google Scholar
- L. B. A. H. Hommels
You can also search for this author in PubMed Google Scholar
- B. P. Honan
You can also search for this author in PubMed Google Scholar
- J. Hong
You can also search for this author in PubMed Google Scholar
- T. M. Hong
You can also search for this author in PubMed Google Scholar
- J. C. Honig
You can also search for this author in PubMed Google Scholar
- B. H. Hooberman
You can also search for this author in PubMed Google Scholar
- W. H. Hopkins
You can also search for this author in PubMed Google Scholar
- Y. Horii
You can also search for this author in PubMed Google Scholar
- S. Hou
You can also search for this author in PubMed Google Scholar
- A. S. Howard
You can also search for this author in PubMed Google Scholar
- J. Howarth
You can also search for this author in PubMed Google Scholar
- J. Hoya
You can also search for this author in PubMed Google Scholar
- M. Hrabovsky
You can also search for this author in PubMed Google Scholar
- A. Hrynevich
You can also search for this author in PubMed Google Scholar
- T. Hryn’ova
You can also search for this author in PubMed Google Scholar
- P. J. Hsu
You can also search for this author in PubMed Google Scholar
- S.-C. Hsu
You can also search for this author in PubMed Google Scholar
- Q. Hu
You can also search for this author in PubMed Google Scholar
- Y. F. Hu
You can also search for this author in PubMed Google Scholar
- D. P. Huang
You can also search for this author in PubMed Google Scholar
- S. Huang
You can also search for this author in PubMed Google Scholar
- X. Huang
You can also search for this author in PubMed Google Scholar
- Y. Huang
You can also search for this author in PubMed Google Scholar
- Y. Huang
You can also search for this author in PubMed Google Scholar
- Z. Huang
You can also search for this author in PubMed Google Scholar
- Z. Hubacek
You can also search for this author in PubMed Google Scholar
- M. Huebner
You can also search for this author in PubMed Google Scholar
- F. Huegging
You can also search for this author in PubMed Google Scholar
- T. B. Huffman
You can also search for this author in PubMed Google Scholar
- M. Huhtinen
You can also search for this author in PubMed Google Scholar
- S. K. Huiberts
You can also search for this author in PubMed Google Scholar
- R. Hulsken
You can also search for this author in PubMed Google Scholar
- N. Huseynov
You can also search for this author in PubMed Google Scholar
- J. Huston
You can also search for this author in PubMed Google Scholar
- J. Huth
You can also search for this author in PubMed Google Scholar
- R. Hyneman
You can also search for this author in PubMed Google Scholar
- S. Hyrych
You can also search for this author in PubMed Google Scholar
- G. Iacobucci
You can also search for this author in PubMed Google Scholar
- G. Iakovidis
You can also search for this author in PubMed Google Scholar
- I. Ibragimov
You can also search for this author in PubMed Google Scholar
- L. Iconomidou-Fayard
You can also search for this author in PubMed Google Scholar
- P. Iengo
You can also search for this author in PubMed Google Scholar
- R. Iguchi
You can also search for this author in PubMed Google Scholar
- T. Iizawa
You can also search for this author in PubMed Google Scholar
- Y. Ikegami
You can also search for this author in PubMed Google Scholar
- A. Ilg
You can also search for this author in PubMed Google Scholar
- N. Ilic
You can also search for this author in PubMed Google Scholar
- H. Imam
You can also search for this author in PubMed Google Scholar
- T. Ingebretsen Carlson
You can also search for this author in PubMed Google Scholar
- G. Introzzi
You can also search for this author in PubMed Google Scholar
- M. Iodice
You can also search for this author in PubMed Google Scholar
- V. Ippolito
You can also search for this author in PubMed Google Scholar
- M. Ishino
You can also search for this author in PubMed Google Scholar
- W. Islam
You can also search for this author in PubMed Google Scholar
- C. Issever
You can also search for this author in PubMed Google Scholar
- S. Istin
You can also search for this author in PubMed Google Scholar
- H. Ito
You can also search for this author in PubMed Google Scholar
- J. M. Iturbe Ponce
You can also search for this author in PubMed Google Scholar
- R. Iuppa
You can also search for this author in PubMed Google Scholar
- A. Ivina
You can also search for this author in PubMed Google Scholar
- J. M. Izen
You can also search for this author in PubMed Google Scholar
- V. Izzo
You can also search for this author in PubMed Google Scholar
- P. Jacka
You can also search for this author in PubMed Google Scholar
- P. Jackson
You can also search for this author in PubMed Google Scholar
- R. M. Jacobs
You can also search for this author in PubMed Google Scholar
- B. P. Jaeger
You can also search for this author in PubMed Google Scholar
- C. S. Jagfeld
You can also search for this author in PubMed Google Scholar
- P. Jain
You can also search for this author in PubMed Google Scholar
- G. Jäkel
You can also search for this author in PubMed Google Scholar
- K. Jakobs
You can also search for this author in PubMed Google Scholar
- T. Jakoubek
You can also search for this author in PubMed Google Scholar
- J. Jamieson
You can also search for this author in PubMed Google Scholar
- K. W. Janas
You can also search for this author in PubMed Google Scholar
- G. Jarlskog
You can also search for this author in PubMed Google Scholar
- A. E. Jaspan
You can also search for this author in PubMed Google Scholar
- M. Javurkova
You can also search for this author in PubMed Google Scholar
- F. Jeanneau
You can also search for this author in PubMed Google Scholar
- L. Jeanty
You can also search for this author in PubMed Google Scholar
- J. Jejelava
You can also search for this author in PubMed Google Scholar
- P. Jenni
You can also search for this author in PubMed Google Scholar
- C. E. Jessiman
You can also search for this author in PubMed Google Scholar
- S. Jézéquel
You can also search for this author in PubMed Google Scholar
- C. Jia
You can also search for this author in PubMed Google Scholar
- J. Jia
You can also search for this author in PubMed Google Scholar
- X. Jia
You can also search for this author in PubMed Google Scholar
- X. Jia
You can also search for this author in PubMed Google Scholar
- Z. Jia
You can also search for this author in PubMed Google Scholar
- Y. Jiang
You can also search for this author in PubMed Google Scholar
- S. Jiggins
You can also search for this author in PubMed Google Scholar
- J. Jimenez Pena
You can also search for this author in PubMed Google Scholar
- S. Jin
You can also search for this author in PubMed Google Scholar
- A. Jinaru
You can also search for this author in PubMed Google Scholar
- O. Jinnouchi
You can also search for this author in PubMed Google Scholar
- P. Johansson
You can also search for this author in PubMed Google Scholar
- K. A. Johns
You can also search for this author in PubMed Google Scholar
- J. W. Johnson
You can also search for this author in PubMed Google Scholar
- D. M. Jones
You can also search for this author in PubMed Google Scholar
- E. Jones
You can also search for this author in PubMed Google Scholar
- P. Jones
You can also search for this author in PubMed Google Scholar
- R. W. L. Jones
You can also search for this author in PubMed Google Scholar
- T. J. Jones
You can also search for this author in PubMed Google Scholar
- R. Joshi
You can also search for this author in PubMed Google Scholar
- J. Jovicevic
You can also search for this author in PubMed Google Scholar
- X. Ju
You can also search for this author in PubMed Google Scholar
- J. J. Junggeburth
You can also search for this author in PubMed Google Scholar
- T. Junkermann
You can also search for this author in PubMed Google Scholar
- A. Juste Rozas
You can also search for this author in PubMed Google Scholar
- S. Kabana
You can also search for this author in PubMed Google Scholar
- A. Kaczmarska
You can also search for this author in PubMed Google Scholar
- M. Kado
You can also search for this author in PubMed Google Scholar
- H. Kagan
You can also search for this author in PubMed Google Scholar
- M. Kagan
You can also search for this author in PubMed Google Scholar
- A. Kahn
You can also search for this author in PubMed Google Scholar
- A. Kahn
You can also search for this author in PubMed Google Scholar
- C. Kahra
You can also search for this author in PubMed Google Scholar
- T. Kaji
You can also search for this author in PubMed Google Scholar
- E. Kajomovitz
You can also search for this author in PubMed Google Scholar
- N. Kakati
You can also search for this author in PubMed Google Scholar
- C. W. Kalderon
You can also search for this author in PubMed Google Scholar
- A. Kamenshchikov
You can also search for this author in PubMed Google Scholar
- S. Kanayama
You can also search for this author in PubMed Google Scholar
- N. J. Kang
You can also search for this author in PubMed Google Scholar
- D. Kar
You can also search for this author in PubMed Google Scholar
- K. Karava
You can also search for this author in PubMed Google Scholar
- M. J. Kareem
You can also search for this author in PubMed Google Scholar
- E. Karentzos
You can also search for this author in PubMed Google Scholar
- I. Karkanias
You can also search for this author in PubMed Google Scholar
- S. N. Karpov
You can also search for this author in PubMed Google Scholar
- Z. M. Karpova
You can also search for this author in PubMed Google Scholar
- V. Kartvelishvili
You can also search for this author in PubMed Google Scholar
- A. N. Karyukhin
You can also search for this author in PubMed Google Scholar
- E. Kasimi
You can also search for this author in PubMed Google Scholar
- C. Kato
You can also search for this author in PubMed Google Scholar
- J. Katzy
You can also search for this author in PubMed Google Scholar
- S. Kaur
You can also search for this author in PubMed Google Scholar
- K. Kawade
You can also search for this author in PubMed Google Scholar
- K. Kawagoe
You can also search for this author in PubMed Google Scholar
- T. Kawamoto
You can also search for this author in PubMed Google Scholar
- G. Kawamura
You can also search for this author in PubMed Google Scholar
- E. F. Kay
You can also search for this author in PubMed Google Scholar
- F. I. Kaya
You can also search for this author in PubMed Google Scholar
- S. Kazakos
You can also search for this author in PubMed Google Scholar
- V. F. Kazanin
You can also search for this author in PubMed Google Scholar
- Y. Ke
You can also search for this author in PubMed Google Scholar
- J. M. Keaveney
You can also search for this author in PubMed Google Scholar
- R. Keeler
You can also search for this author in PubMed Google Scholar
- G. V. Kehris
You can also search for this author in PubMed Google Scholar
- J. S. Keller
You can also search for this author in PubMed Google Scholar
- A. S. Kelly
You can also search for this author in PubMed Google Scholar
- D. Kelsey
You can also search for this author in PubMed Google Scholar
- J. J. Kempster
You can also search for this author in PubMed Google Scholar
- K. E. Kennedy
You can also search for this author in PubMed Google Scholar
- P. D. Kennedy
You can also search for this author in PubMed Google Scholar
- O. Kepka
You can also search for this author in PubMed Google Scholar
- B. P. Kerridge
You can also search for this author in PubMed Google Scholar
- S. Kersten
You can also search for this author in PubMed Google Scholar
- B. P. Kerševan
You can also search for this author in PubMed Google Scholar
- S. Keshri
You can also search for this author in PubMed Google Scholar
- L. Keszeghova
You can also search for this author in PubMed Google Scholar
- S. Ketabchi Haghighat
You can also search for this author in PubMed Google Scholar
- M. Khandoga
You can also search for this author in PubMed Google Scholar
- A. Khanov
You can also search for this author in PubMed Google Scholar
- A. G. Kharlamov
You can also search for this author in PubMed Google Scholar
- T. Kharlamova
You can also search for this author in PubMed Google Scholar
- E. E. Khoda
You can also search for this author in PubMed Google Scholar
- T. J. Khoo
You can also search for this author in PubMed Google Scholar
- G. Khoriauli
You can also search for this author in PubMed Google Scholar
- J. Khubua
You can also search for this author in PubMed Google Scholar
- Y. A. R. Khwaira
You can also search for this author in PubMed Google Scholar
- M. Kiehn
You can also search for this author in PubMed Google Scholar
- A. Kilgallon
You can also search for this author in PubMed Google Scholar
- D. W. Kim
You can also search for this author in PubMed Google Scholar
- E. Kim
You can also search for this author in PubMed Google Scholar
- Y. K. Kim
You can also search for this author in PubMed Google Scholar
- N. Kimura
You can also search for this author in PubMed Google Scholar
- A. Kirchhoff
You can also search for this author in PubMed Google Scholar
- D. Kirchmeier
You can also search for this author in PubMed Google Scholar
- C. Kirfel
You can also search for this author in PubMed Google Scholar
- J. Kirk
You can also search for this author in PubMed Google Scholar
- A. E. Kiryunin
You can also search for this author in PubMed Google Scholar
- T. Kishimoto
You can also search for this author in PubMed Google Scholar
- D. P. Kisliuk
You can also search for this author in PubMed Google Scholar
- C. Kitsaki
You can also search for this author in PubMed Google Scholar
- O. Kivernyk
You can also search for this author in PubMed Google Scholar
- M. Klassen
You can also search for this author in PubMed Google Scholar
- C. Klein
You can also search for this author in PubMed Google Scholar
- L. Klein
You can also search for this author in PubMed Google Scholar
- M. H. Klein
You can also search for this author in PubMed Google Scholar
- M. Klein
You can also search for this author in PubMed Google Scholar
- S. B. Klein
You can also search for this author in PubMed Google Scholar
- U. Klein
You can also search for this author in PubMed Google Scholar
- P. Klimek
You can also search for this author in PubMed Google Scholar
- A. Klimentov
You can also search for this author in PubMed Google Scholar
- F. Klimpel
You can also search for this author in PubMed Google Scholar
- T. Klioutchnikova
You can also search for this author in PubMed Google Scholar
- P. Kluit
You can also search for this author in PubMed Google Scholar
- S. Kluth
You can also search for this author in PubMed Google Scholar
- E. Kneringer
You can also search for this author in PubMed Google Scholar
- T. M. Knight
You can also search for this author in PubMed Google Scholar
- A. Knue
You can also search for this author in PubMed Google Scholar
- D. Kobayashi
You can also search for this author in PubMed Google Scholar
- R. Kobayashi
You can also search for this author in PubMed Google Scholar
- M. Kocian
You can also search for this author in PubMed Google Scholar
- P. Kodyš
You can also search for this author in PubMed Google Scholar
- D. M. Koeck
You can also search for this author in PubMed Google Scholar
- P. T. Koenig
You can also search for this author in PubMed Google Scholar
- T. Koffas
You can also search for this author in PubMed Google Scholar
- M. Kolb
You can also search for this author in PubMed Google Scholar
- I. Koletsou
You can also search for this author in PubMed Google Scholar
- T. Komarek
You can also search for this author in PubMed Google Scholar
- K. Köneke
You can also search for this author in PubMed Google Scholar
- A. X. Y. Kong
You can also search for this author in PubMed Google Scholar
- T. Kono
You can also search for this author in PubMed Google Scholar
- N. Konstantinidis
You can also search for this author in PubMed Google Scholar
- B. Konya
You can also search for this author in PubMed Google Scholar
- R. Kopeliansky
You can also search for this author in PubMed Google Scholar
- S. Koperny
You can also search for this author in PubMed Google Scholar
- K. Korcyl
You can also search for this author in PubMed Google Scholar
- K. Kordas
You can also search for this author in PubMed Google Scholar
- G. Koren
You can also search for this author in PubMed Google Scholar
- A. Korn
You can also search for this author in PubMed Google Scholar
- S. Korn
You can also search for this author in PubMed Google Scholar
- I. Korolkov
You can also search for this author in PubMed Google Scholar
- N. Korotkova
You can also search for this author in PubMed Google Scholar
- B. Kortman
You can also search for this author in PubMed Google Scholar
- O. Kortner
You can also search for this author in PubMed Google Scholar
- S. Kortner
You can also search for this author in PubMed Google Scholar
- W. H. Kostecka
You can also search for this author in PubMed Google Scholar
- V. V. Kostyukhin
You can also search for this author in PubMed Google Scholar
- A. Kotsokechagia
You can also search for this author in PubMed Google Scholar
- A. Kotwal
You can also search for this author in PubMed Google Scholar
- A. Koulouris
You can also search for this author in PubMed Google Scholar
- A. Kourkoumeli-Charalampidi
You can also search for this author in PubMed Google Scholar
- C. Kourkoumelis
You can also search for this author in PubMed Google Scholar
- E. Kourlitis
You can also search for this author in PubMed Google Scholar
- O. Kovanda
You can also search for this author in PubMed Google Scholar
- R. Kowalewski
You can also search for this author in PubMed Google Scholar
- W. Kozanecki
You can also search for this author in PubMed Google Scholar
- A. S. Kozhin
You can also search for this author in PubMed Google Scholar
- V. A. Kramarenko
You can also search for this author in PubMed Google Scholar
- G. Kramberger
You can also search for this author in PubMed Google Scholar
- P. Kramer
You can also search for this author in PubMed Google Scholar
- M. W. Krasny
You can also search for this author in PubMed Google Scholar
- A. Krasznahorkay
You can also search for this author in PubMed Google Scholar
- J. A. Kremer
You can also search for this author in PubMed Google Scholar
- T. Kresse
You can also search for this author in PubMed Google Scholar
- J. Kretzschmar
You can also search for this author in PubMed Google Scholar
- K. Kreul
You can also search for this author in PubMed Google Scholar
- P. Krieger
You can also search for this author in PubMed Google Scholar
- S. Krishnamurthy
You can also search for this author in PubMed Google Scholar
- M. Krivos
You can also search for this author in PubMed Google Scholar
- K. Krizka
You can also search for this author in PubMed Google Scholar
- K. Kroeninger
You can also search for this author in PubMed Google Scholar
- H. Kroha
You can also search for this author in PubMed Google Scholar
- J. Kroll
You can also search for this author in PubMed Google Scholar
- J. Kroll
You can also search for this author in PubMed Google Scholar
- K. S. Krowpman
You can also search for this author in PubMed Google Scholar
- U. Kruchonak
You can also search for this author in PubMed Google Scholar
- H. Krüger
You can also search for this author in PubMed Google Scholar
- N. Krumnack
You can also search for this author in PubMed Google Scholar
- M. C. Kruse
You can also search for this author in PubMed Google Scholar
- J. A. Krzysiak
You can also search for this author in PubMed Google Scholar
- O. Kuchinskaia
You can also search for this author in PubMed Google Scholar
- S. Kuday
You can also search for this author in PubMed Google Scholar
- D. Kuechler
You can also search for this author in PubMed Google Scholar
- J. T. Kuechler
You can also search for this author in PubMed Google Scholar
- S. Kuehn
You can also search for this author in PubMed Google Scholar
- R. Kuesters
You can also search for this author in PubMed Google Scholar
- T. Kuhl
You can also search for this author in PubMed Google Scholar
- V. Kukhtin
You can also search for this author in PubMed Google Scholar
- Y. Kulchitsky
You can also search for this author in PubMed Google Scholar
- S. Kuleshov
You can also search for this author in PubMed Google Scholar
- M. Kumar
You can also search for this author in PubMed Google Scholar
- N. Kumari
You can also search for this author in PubMed Google Scholar
- A. Kupco
You can also search for this author in PubMed Google Scholar
- T. Kupfer
You can also search for this author in PubMed Google Scholar
- A. Kupich
You can also search for this author in PubMed Google Scholar
- O. Kuprash
You can also search for this author in PubMed Google Scholar
- H. Kurashige
You can also search for this author in PubMed Google Scholar
- L. L. Kurchaninov
You can also search for this author in PubMed Google Scholar
- Y. A. Kurochkin
You can also search for this author in PubMed Google Scholar
- A. Kurova
You can also search for this author in PubMed Google Scholar
- M. Kuze
You can also search for this author in PubMed Google Scholar
- A. K. Kvam
You can also search for this author in PubMed Google Scholar
- J. Kvita
You can also search for this author in PubMed Google Scholar
- T. Kwan
You can also search for this author in PubMed Google Scholar
- K. W. Kwok
You can also search for this author in PubMed Google Scholar
- N. G. Kyriacou
You can also search for this author in PubMed Google Scholar
- L. A. O. Laatu
You can also search for this author in PubMed Google Scholar
- C. Lacasta
You can also search for this author in PubMed Google Scholar
- F. Lacava
You can also search for this author in PubMed Google Scholar
- H. Lacker
You can also search for this author in PubMed Google Scholar
- D. Lacour
You can also search for this author in PubMed Google Scholar
- N. N. Lad
You can also search for this author in PubMed Google Scholar
- E. Ladygin
You can also search for this author in PubMed Google Scholar
- B. Laforge
You can also search for this author in PubMed Google Scholar
- T. Lagouri
You can also search for this author in PubMed Google Scholar
- S. Lai
You can also search for this author in PubMed Google Scholar
- I. K. Lakomiec
You can also search for this author in PubMed Google Scholar
- N. Lalloue
You can also search for this author in PubMed Google Scholar
- J. E. Lambert
You can also search for this author in PubMed Google Scholar
- S. Lammers
You can also search for this author in PubMed Google Scholar
- W. Lampl
You can also search for this author in PubMed Google Scholar
- C. Lampoudis
You can also search for this author in PubMed Google Scholar
- A. N. Lancaster
You can also search for this author in PubMed Google Scholar
- E. Lançon
You can also search for this author in PubMed Google Scholar
- U. Landgraf
You can also search for this author in PubMed Google Scholar
- M. P. J. Landon
You can also search for this author in PubMed Google Scholar
- V. S. Lang
You can also search for this author in PubMed Google Scholar
- R. J. Langenberg
You can also search for this author in PubMed Google Scholar
- A. J. Lankford
You can also search for this author in PubMed Google Scholar
- F. Lanni
You can also search for this author in PubMed Google Scholar
- K. Lantzsch
You can also search for this author in PubMed Google Scholar
- A. Lanza
You can also search for this author in PubMed Google Scholar
- A. Lapertosa
You can also search for this author in PubMed Google Scholar
- J. F. Laporte
You can also search for this author in PubMed Google Scholar
- T. Lari
You can also search for this author in PubMed Google Scholar
- F. Lasagni Manghi
You can also search for this author in PubMed Google Scholar
- M. Lassnig
You can also search for this author in PubMed Google Scholar
- V. Latonova
You can also search for this author in PubMed Google Scholar
- A. Laudrain
You can also search for this author in PubMed Google Scholar
- A. Laurier
You can also search for this author in PubMed Google Scholar
- S. D. Lawlor
You can also search for this author in PubMed Google Scholar
- Z. Lawrence
You can also search for this author in PubMed Google Scholar
- M. Lazzaroni
You can also search for this author in PubMed Google Scholar
- B. Le
You can also search for this author in PubMed Google Scholar
- B. Leban
You can also search for this author in PubMed Google Scholar
- A. Lebedev
You can also search for this author in PubMed Google Scholar
- M. LeBlanc
You can also search for this author in PubMed Google Scholar
- T. LeCompte
You can also search for this author in PubMed Google Scholar
- F. Ledroit-Guillon
You can also search for this author in PubMed Google Scholar
- A. C. A. Lee
You can also search for this author in PubMed Google Scholar
- G. R. Lee
You can also search for this author in PubMed Google Scholar
- S. C. Lee
You can also search for this author in PubMed Google Scholar
- S. Lee
You can also search for this author in PubMed Google Scholar
- T. F. Lee
You can also search for this author in PubMed Google Scholar
- L. L. Leeuw
You can also search for this author in PubMed Google Scholar
- H. P. Lefebvre
You can also search for this author in PubMed Google Scholar
- M. Lefebvre
You can also search for this author in PubMed Google Scholar
- C. Leggett
You can also search for this author in PubMed Google Scholar
- K. Lehmann
You can also search for this author in PubMed Google Scholar
- G. Lehmann Miotto
You can also search for this author in PubMed Google Scholar
- M. Leigh
You can also search for this author in PubMed Google Scholar
- W. A. Leight
You can also search for this author in PubMed Google Scholar
- A. Leisos
You can also search for this author in PubMed Google Scholar
- M. A. L. Leite
You can also search for this author in PubMed Google Scholar
- C. E. Leitgeb
You can also search for this author in PubMed Google Scholar
- R. Leitner
You can also search for this author in PubMed Google Scholar
- K. J. C. Leney
You can also search for this author in PubMed Google Scholar
- T. Lenz
You can also search for this author in PubMed Google Scholar
- S. Leone
You can also search for this author in PubMed Google Scholar
- C. Leonidopoulos
You can also search for this author in PubMed Google Scholar
- A. Leopold
You can also search for this author in PubMed Google Scholar
- C. Leroy
You can also search for this author in PubMed Google Scholar
- R. Les
You can also search for this author in PubMed Google Scholar
- C. G. Lester
You can also search for this author in PubMed Google Scholar
- M. Levchenko
You can also search for this author in PubMed Google Scholar
- J. Levêque
You can also search for this author in PubMed Google Scholar
- D. Levin
You can also search for this author in PubMed Google Scholar
- L. J. Levinson
You can also search for this author in PubMed Google Scholar
- M. P. Lewicki
You can also search for this author in PubMed Google Scholar
- D. J. Lewis
You can also search for this author in PubMed Google Scholar
- A. Li
You can also search for this author in PubMed Google Scholar
- B. Li
You can also search for this author in PubMed Google Scholar
- C. Li
You can also search for this author in PubMed Google Scholar
- C.-Q. Li
You can also search for this author in PubMed Google Scholar
- H. Li
You can also search for this author in PubMed Google Scholar
- H. Li
You can also search for this author in PubMed Google Scholar
- H. Li
You can also search for this author in PubMed Google Scholar
- H. Li
You can also search for this author in PubMed Google Scholar
- J. Li
You can also search for this author in PubMed Google Scholar
- K. Li
You can also search for this author in PubMed Google Scholar
- L. Li
You can also search for this author in PubMed Google Scholar
- M. Li
You can also search for this author in PubMed Google Scholar
- Q. Y. Li
You can also search for this author in PubMed Google Scholar
- S. Li
You can also search for this author in PubMed Google Scholar
- S. Li
You can also search for this author in PubMed Google Scholar
- T. Li
You can also search for this author in PubMed Google Scholar
- X. Li
You can also search for this author in PubMed Google Scholar
- Z. Li
You can also search for this author in PubMed Google Scholar
- Z. Li
You can also search for this author in PubMed Google Scholar
- Z. Li
You can also search for this author in PubMed Google Scholar
- Z. Li
You can also search for this author in PubMed Google Scholar
- Z. Li
You can also search for this author in PubMed Google Scholar
- Z. Liang
You can also search for this author in PubMed Google Scholar
- M. Liberatore
You can also search for this author in PubMed Google Scholar
- B. Liberti
You can also search for this author in PubMed Google Scholar
- K. Lie
You can also search for this author in PubMed Google Scholar
- J. Lieber Marin
You can also search for this author in PubMed Google Scholar
- H. Lien
You can also search for this author in PubMed Google Scholar
- K. Lin
You can also search for this author in PubMed Google Scholar
- R. A. Linck
You can also search for this author in PubMed Google Scholar
- R. E. Lindley
You can also search for this author in PubMed Google Scholar
- J. H. Lindon
You can also search for this author in PubMed Google Scholar
- A. Linss
You can also search for this author in PubMed Google Scholar
- E. Lipeles
You can also search for this author in PubMed Google Scholar
- A. Lipniacka
You can also search for this author in PubMed Google Scholar
- A. Lister
You can also search for this author in PubMed Google Scholar
- J. D. Little
You can also search for this author in PubMed Google Scholar
- B. Liu
You can also search for this author in PubMed Google Scholar
- B. X. Liu
You can also search for this author in PubMed Google Scholar
- D. Liu
You can also search for this author in PubMed Google Scholar
- J. B. Liu
You can also search for this author in PubMed Google Scholar
- J. K. K. Liu
You can also search for this author in PubMed Google Scholar
- K. Liu
You can also search for this author in PubMed Google Scholar
- M. Liu
You can also search for this author in PubMed Google Scholar
- M. Y. Liu
You can also search for this author in PubMed Google Scholar
- P. Liu
You can also search for this author in PubMed Google Scholar
- Q. Liu
You can also search for this author in PubMed Google Scholar
- X. Liu
You can also search for this author in PubMed Google Scholar
- Y. Liu
You can also search for this author in PubMed Google Scholar
- Y. L. Liu
You can also search for this author in PubMed Google Scholar
- Y. W. Liu
You can also search for this author in PubMed Google Scholar
- M. Livan
You can also search for this author in PubMed Google Scholar
- J. Llorente Merino
You can also search for this author in PubMed Google Scholar
- S. L. Lloyd
You can also search for this author in PubMed Google Scholar
- E. M. Lobodzinska
You can also search for this author in PubMed Google Scholar
- P. Loch
You can also search for this author in PubMed Google Scholar
- S. Loffredo
You can also search for this author in PubMed Google Scholar
- T. Lohse
You can also search for this author in PubMed Google Scholar
- K. Lohwasser
You can also search for this author in PubMed Google Scholar
- M. Lokajicek
You can also search for this author in PubMed Google Scholar
- J. D. Long
You can also search for this author in PubMed Google Scholar
- I. Longarini
You can also search for this author in PubMed Google Scholar
- L. Longo
You can also search for this author in PubMed Google Scholar
- R. Longo
You can also search for this author in PubMed Google Scholar
- I. Lopez Paz
You can also search for this author in PubMed Google Scholar
- A. Lopez Solis
You can also search for this author in PubMed Google Scholar
- J. Lorenz
You can also search for this author in PubMed Google Scholar
- N. Lorenzo Martinez
You can also search for this author in PubMed Google Scholar
- A. M. Lory
You can also search for this author in PubMed Google Scholar
- X. Lou
You can also search for this author in PubMed Google Scholar
- X. Lou
You can also search for this author in PubMed Google Scholar
- A. Lounis
You can also search for this author in PubMed Google Scholar
- J. Love
You can also search for this author in PubMed Google Scholar
- P. A. Love
You can also search for this author in PubMed Google Scholar
- J. J. Lozano Bahilo
You can also search for this author in PubMed Google Scholar
- G. Lu
You can also search for this author in PubMed Google Scholar
- M. Lu
You can also search for this author in PubMed Google Scholar
- S. Lu
You can also search for this author in PubMed Google Scholar
- Y. J. Lu
You can also search for this author in PubMed Google Scholar
- H. J. Lubatti
You can also search for this author in PubMed Google Scholar
- C. Luci
You can also search for this author in PubMed Google Scholar
- F. L. Lucio Alves
You can also search for this author in PubMed Google Scholar
- A. Lucotte
You can also search for this author in PubMed Google Scholar
- F. Luehring
You can also search for this author in PubMed Google Scholar
- I. Luise
You can also search for this author in PubMed Google Scholar
- O. Lukianchuk
You can also search for this author in PubMed Google Scholar
- O. Lundberg
You can also search for this author in PubMed Google Scholar
- B. Lund-Jensen
You can also search for this author in PubMed Google Scholar
- N. A. Luongo
You can also search for this author in PubMed Google Scholar
- M. S. Lutz
You can also search for this author in PubMed Google Scholar
- D. Lynn
You can also search for this author in PubMed Google Scholar
- H. Lyons
You can also search for this author in PubMed Google Scholar
- R. Lysak
You can also search for this author in PubMed Google Scholar
- E. Lytken
You can also search for this author in PubMed Google Scholar
- F. Lyu
You can also search for this author in PubMed Google Scholar
- V. Lyubushkin
You can also search for this author in PubMed Google Scholar
- T. Lyubushkina
You can also search for this author in PubMed Google Scholar
- M. M. Lyukova
You can also search for this author in PubMed Google Scholar
- H. Ma
You can also search for this author in PubMed Google Scholar
- L. L. Ma
You can also search for this author in PubMed Google Scholar
- Y. Ma
You can also search for this author in PubMed Google Scholar
- D. M. Mac Donell
You can also search for this author in PubMed Google Scholar
- G. Maccarrone
You can also search for this author in PubMed Google Scholar
- J. C. MacDonald
You can also search for this author in PubMed Google Scholar
- R. Madar
You can also search for this author in PubMed Google Scholar
- W. F. Mader
You can also search for this author in PubMed Google Scholar
- J. Maeda
You can also search for this author in PubMed Google Scholar
- T. Maeno
You can also search for this author in PubMed Google Scholar
- M. Maerker
You can also search for this author in PubMed Google Scholar
- H. Maguire
You can also search for this author in PubMed Google Scholar
- D. J. Mahon
You can also search for this author in PubMed Google Scholar
- A. Maio
You can also search for this author in PubMed Google Scholar
- K. Maj
You can also search for this author in PubMed Google Scholar
- O. Majersky
You can also search for this author in PubMed Google Scholar
- S. Majewski
You can also search for this author in PubMed Google Scholar
- N. Makovec
You can also search for this author in PubMed Google Scholar
- V. Maksimovic
You can also search for this author in PubMed Google Scholar
- B. Malaescu
You can also search for this author in PubMed Google Scholar
- Pa. Malecki
You can also search for this author in PubMed Google Scholar
- V. P. Maleev
You can also search for this author in PubMed Google Scholar
- F. Malek
You can also search for this author in PubMed Google Scholar
- D. Malito
You can also search for this author in PubMed Google Scholar
- U. Mallik
You can also search for this author in PubMed Google Scholar
- C. Malone
You can also search for this author in PubMed Google Scholar
- S. Maltezos
You can also search for this author in PubMed Google Scholar
- S. Malyukov
You can also search for this author in PubMed Google Scholar
- J. Mamuzic
You can also search for this author in PubMed Google Scholar
- G. Mancini
You can also search for this author in PubMed Google Scholar
- G. Manco
You can also search for this author in PubMed Google Scholar
- J. P. Mandalia
You can also search for this author in PubMed Google Scholar
- I. Mandić
You can also search for this author in PubMed Google Scholar
- L. Manhaes de Andrade Filho
You can also search for this author in PubMed Google Scholar
- I. M. Maniatis
You can also search for this author in PubMed Google Scholar
- J. Manjarres Ramos
You can also search for this author in PubMed Google Scholar
- D. C. Mankad
You can also search for this author in PubMed Google Scholar
- A. Mann
You can also search for this author in PubMed Google Scholar
- B. Mansoulie
You can also search for this author in PubMed Google Scholar
- S. Manzoni
You can also search for this author in PubMed Google Scholar
- A. Marantis
You can also search for this author in PubMed Google Scholar
- G. Marchiori
You can also search for this author in PubMed Google Scholar
- M. Marcisovsky
You can also search for this author in PubMed Google Scholar
- C. Marcon
You can also search for this author in PubMed Google Scholar
- M. Marinescu
You can also search for this author in PubMed Google Scholar
- M. Marjanovic
You can also search for this author in PubMed Google Scholar
- E. J. Marshall
You can also search for this author in PubMed Google Scholar
- Z. Marshall
You can also search for this author in PubMed Google Scholar
- S. Marti-Garcia
You can also search for this author in PubMed Google Scholar
- T. A. Martin
You can also search for this author in PubMed Google Scholar
- V. J. Martin
You can also search for this author in PubMed Google Scholar
- B. Martin dit Latour
You can also search for this author in PubMed Google Scholar
- L. Martinelli
You can also search for this author in PubMed Google Scholar
- M. Martinez
You can also search for this author in PubMed Google Scholar
- P. Martinez Agullo
You can also search for this author in PubMed Google Scholar
- V. I. Martinez Outschoorn
You can also search for this author in PubMed Google Scholar
- P. Martinez Suarez
You can also search for this author in PubMed Google Scholar
- S. Martin-Haugh
You can also search for this author in PubMed Google Scholar
- V. S. Martoiu
You can also search for this author in PubMed Google Scholar
- A. C. Martyniuk
You can also search for this author in PubMed Google Scholar
- A. Marzin
You can also search for this author in PubMed Google Scholar
- S. R. Maschek
You can also search for this author in PubMed Google Scholar
- D. Mascione
You can also search for this author in PubMed Google Scholar
- L. Masetti
You can also search for this author in PubMed Google Scholar
- T. Mashimo
You can also search for this author in PubMed Google Scholar
- J. Masik
You can also search for this author in PubMed Google Scholar
- A. L. Maslennikov
You can also search for this author in PubMed Google Scholar
- L. Massa
You can also search for this author in PubMed Google Scholar
- P. Massarotti
You can also search for this author in PubMed Google Scholar
- P. Mastrandrea
You can also search for this author in PubMed Google Scholar
- A. Mastroberardino
You can also search for this author in PubMed Google Scholar
- T. Masubuchi
You can also search for this author in PubMed Google Scholar
- T. Mathisen
You can also search for this author in PubMed Google Scholar
- N. Matsuzawa
You can also search for this author in PubMed Google Scholar
- J. Maurer
You can also search for this author in PubMed Google Scholar
- B. Maček
You can also search for this author in PubMed Google Scholar
- D. A. Maximov
You can also search for this author in PubMed Google Scholar
- R. Mazini
You can also search for this author in PubMed Google Scholar
- I. Maznas
You can also search for this author in PubMed Google Scholar
- M. Mazza
You can also search for this author in PubMed Google Scholar
- S. M. Mazza
You can also search for this author in PubMed Google Scholar
- C. Mc Ginn
You can also search for this author in PubMed Google Scholar
- J. P. Mc Gowan
You can also search for this author in PubMed Google Scholar
- S. P. Mc Kee
You can also search for this author in PubMed Google Scholar
- E. F. McDonald
You can also search for this author in PubMed Google Scholar
- A. E. McDougall
You can also search for this author in PubMed Google Scholar
- J. A. Mcfayden
You can also search for this author in PubMed Google Scholar
- G. Mchedlidze
You can also search for this author in PubMed Google Scholar
- R. P. Mckenzie
You can also search for this author in PubMed Google Scholar
- T. C. Mclachlan
You can also search for this author in PubMed Google Scholar
- D. J. Mclaughlin
You can also search for this author in PubMed Google Scholar
- K. D. McLean
You can also search for this author in PubMed Google Scholar
- S. J. McMahon
You can also search for this author in PubMed Google Scholar
- P. C. McNamara
You can also search for this author in PubMed Google Scholar
- C. M. Mcpartland
You can also search for this author in PubMed Google Scholar
- R. A. McPherson
You can also search for this author in PubMed Google Scholar
- T. Megy
You can also search for this author in PubMed Google Scholar
- S. Mehlhase
You can also search for this author in PubMed Google Scholar
- A. Mehta
You can also search for this author in PubMed Google Scholar
- B. Meirose
You can also search for this author in PubMed Google Scholar
- D. Melini
You can also search for this author in PubMed Google Scholar
- B. R. Mellado Garcia
You can also search for this author in PubMed Google Scholar
- A. H. Melo
You can also search for this author in PubMed Google Scholar
- F. Meloni
You can also search for this author in PubMed Google Scholar
- E. D. Mendes Gouveia
You can also search for this author in PubMed Google Scholar
- A. M. Mendes Jacques Da Costa
You can also search for this author in PubMed Google Scholar
- H. Y. Meng
You can also search for this author in PubMed Google Scholar
- L. Meng
You can also search for this author in PubMed Google Scholar
- S. Menke
You can also search for this author in PubMed Google Scholar
- M. Mentink
You can also search for this author in PubMed Google Scholar
- E. Meoni
You can also search for this author in PubMed Google Scholar
- C. Merlassino
You can also search for this author in PubMed Google Scholar
- L. Merola
You can also search for this author in PubMed Google Scholar
- C. Meroni
You can also search for this author in PubMed Google Scholar
- G. Merz
You can also search for this author in PubMed Google Scholar
- O. Meshkov
You can also search for this author in PubMed Google Scholar
- J. Metcalfe
You can also search for this author in PubMed Google Scholar
- A. S. Mete
You can also search for this author in PubMed Google Scholar
- C. Meyer
You can also search for this author in PubMed Google Scholar
- J.-P. Meyer
You can also search for this author in PubMed Google Scholar
- M. Michetti
You can also search for this author in PubMed Google Scholar
- R. P. Middleton
You can also search for this author in PubMed Google Scholar
- L. Mijović
You can also search for this author in PubMed Google Scholar
- G. Mikenberg
You can also search for this author in PubMed Google Scholar
- M. Mikestikova
You can also search for this author in PubMed Google Scholar
- M. Mikuž
You can also search for this author in PubMed Google Scholar
- H. Mildner
You can also search for this author in PubMed Google Scholar
- A. Milic
You can also search for this author in PubMed Google Scholar
- C. D. Milke
You can also search for this author in PubMed Google Scholar
- D. W. Miller
You can also search for this author in PubMed Google Scholar
- L. S. Miller
You can also search for this author in PubMed Google Scholar
- A. Milov
You can also search for this author in PubMed Google Scholar
- D. A. Milstead
You can also search for this author in PubMed Google Scholar
- T. Min
You can also search for this author in PubMed Google Scholar
- A. A. Minaenko
You can also search for this author in PubMed Google Scholar
- I. A. Minashvili
You can also search for this author in PubMed Google Scholar
- L. Mince
You can also search for this author in PubMed Google Scholar
- A. I. Mincer
You can also search for this author in PubMed Google Scholar
- B. Mindur
You can also search for this author in PubMed Google Scholar
- M. Mineev
You can also search for this author in PubMed Google Scholar
- Y. Mino
You can also search for this author in PubMed Google Scholar
- L. M. Mir
You can also search for this author in PubMed Google Scholar
- M. Miralles Lopez
You can also search for this author in PubMed Google Scholar
- M. Mironova
You can also search for this author in PubMed Google Scholar
- M. C. Missio
You can also search for this author in PubMed Google Scholar
- T. Mitani
You can also search for this author in PubMed Google Scholar
- A. Mitra
You can also search for this author in PubMed Google Scholar
- V. A. Mitsou
You can also search for this author in PubMed Google Scholar
- O. Miu
You can also search for this author in PubMed Google Scholar
- P. S. Miyagawa
You can also search for this author in PubMed Google Scholar
- Y. Miyazaki
You can also search for this author in PubMed Google Scholar
- A. Mizukami
You can also search for this author in PubMed Google Scholar
- J. U. Mjörnmark
You can also search for this author in PubMed Google Scholar
- T. Mkrtchyan
You can also search for this author in PubMed Google Scholar
- M. Mlinarevic
You can also search for this author in PubMed Google Scholar
- T. Mlinarevic
You can also search for this author in PubMed Google Scholar
- M. Mlynarikova
You can also search for this author in PubMed Google Scholar
- T. Moa
You can also search for this author in PubMed Google Scholar
- S. Mobius
You can also search for this author in PubMed Google Scholar
- K. Mochizuki
You can also search for this author in PubMed Google Scholar
- P. Moder
You can also search for this author in PubMed Google Scholar
- P. Mogg
You can also search for this author in PubMed Google Scholar
- A. F. Mohammed
You can also search for this author in PubMed Google Scholar
- S. Mohapatra
You can also search for this author in PubMed Google Scholar
- G. Mokgatitswane
You can also search for this author in PubMed Google Scholar
- B. Mondal
You can also search for this author in PubMed Google Scholar
- S. Mondal
You can also search for this author in PubMed Google Scholar
- K. Mönig
You can also search for this author in PubMed Google Scholar
- E. Monnier
You can also search for this author in PubMed Google Scholar
- L. Monsonis Romero
You can also search for this author in PubMed Google Scholar
- J. Montejo Berlingen
You can also search for this author in PubMed Google Scholar
- M. Montella
You can also search for this author in PubMed Google Scholar
- F. Monticelli
You can also search for this author in PubMed Google Scholar
- N. Morange
You can also search for this author in PubMed Google Scholar
- A. L. Moreira De Carvalho
You can also search for this author in PubMed Google Scholar
- M. Moreno Llácer
You can also search for this author in PubMed Google Scholar
- C. Moreno Martinez
You can also search for this author in PubMed Google Scholar
- P. Morettini
You can also search for this author in PubMed Google Scholar
- S. Morgenstern
You can also search for this author in PubMed Google Scholar
- M. Morii
You can also search for this author in PubMed Google Scholar
- M. Morinaga
You can also search for this author in PubMed Google Scholar
- A. K. Morley
You can also search for this author in PubMed Google Scholar
- F. Morodei
You can also search for this author in PubMed Google Scholar
- L. Morvaj
You can also search for this author in PubMed Google Scholar
- P. Moschovakos
You can also search for this author in PubMed Google Scholar
- B. Moser
You can also search for this author in PubMed Google Scholar
- M. Mosidze
You can also search for this author in PubMed Google Scholar
- T. Moskalets
You can also search for this author in PubMed Google Scholar
- P. Moskvitina
You can also search for this author in PubMed Google Scholar
- J. Moss
You can also search for this author in PubMed Google Scholar
- E. J. W. Moyse
You can also search for this author in PubMed Google Scholar
- O. Mtintsilana
You can also search for this author in PubMed Google Scholar
- S. Muanza
You can also search for this author in PubMed Google Scholar
- J. Mueller
You can also search for this author in PubMed Google Scholar
- D. Muenstermann
You can also search for this author in PubMed Google Scholar
- R. Müller
You can also search for this author in PubMed Google Scholar
- G. A. Mullier
You can also search for this author in PubMed Google Scholar
- J. J. Mullin
You can also search for this author in PubMed Google Scholar
- D. P. Mungo
You can also search for this author in PubMed Google Scholar
- J. L. Munoz Martinez
You can also search for this author in PubMed Google Scholar
- D. Munoz Perez
You can also search for this author in PubMed Google Scholar
- F. J. Munoz Sanchez
You can also search for this author in PubMed Google Scholar
- M. Murin
You can also search for this author in PubMed Google Scholar
- W. J. Murray
You can also search for this author in PubMed Google Scholar
- A. Murrone
You can also search for this author in PubMed Google Scholar
- J. M. Muse
You can also search for this author in PubMed Google Scholar
- M. Muškinja
You can also search for this author in PubMed Google Scholar
- C. Mwewa
You can also search for this author in PubMed Google Scholar
- A. G. Myagkov
You can also search for this author in PubMed Google Scholar
- A. J. Myers
You can also search for this author in PubMed Google Scholar
- A. A. Myers
You can also search for this author in PubMed Google Scholar
- G. Myers
You can also search for this author in PubMed Google Scholar
- M. Myska
You can also search for this author in PubMed Google Scholar
- B. P. Nachman
You can also search for this author in PubMed Google Scholar
- O. Nackenhorst
You can also search for this author in PubMed Google Scholar
- A. Nag
You can also search for this author in PubMed Google Scholar
- K. Nagai
You can also search for this author in PubMed Google Scholar
- K. Nagano
You can also search for this author in PubMed Google Scholar
- J. L. Nagle
You can also search for this author in PubMed Google Scholar
- E. Nagy
You can also search for this author in PubMed Google Scholar
- A. M. Nairz
You can also search for this author in PubMed Google Scholar
- Y. Nakahama
You can also search for this author in PubMed Google Scholar
- K. Nakamura
You can also search for this author in PubMed Google Scholar
- H. Nanjo
You can also search for this author in PubMed Google Scholar
- R. Narayan
You can also search for this author in PubMed Google Scholar
- E. A. Narayanan
You can also search for this author in PubMed Google Scholar
- I. Naryshkin
You can also search for this author in PubMed Google Scholar
- M. Naseri
You can also search for this author in PubMed Google Scholar
- C. Nass
You can also search for this author in PubMed Google Scholar
- G. Navarro
You can also search for this author in PubMed Google Scholar
- J. Navarro-Gonzalez
You can also search for this author in PubMed Google Scholar
- R. Nayak
You can also search for this author in PubMed Google Scholar
- A. Nayaz
You can also search for this author in PubMed Google Scholar
- P. Y. Nechaeva
You can also search for this author in PubMed Google Scholar
- F. Nechansky
You can also search for this author in PubMed Google Scholar
- L. Nedic
You can also search for this author in PubMed Google Scholar
- T. J. Neep
You can also search for this author in PubMed Google Scholar
- A. Negri
You can also search for this author in PubMed Google Scholar
- M. Negrini
You can also search for this author in PubMed Google Scholar
- C. Nellist
You can also search for this author in PubMed Google Scholar
- C. Nelson
You can also search for this author in PubMed Google Scholar
- K. Nelson
You can also search for this author in PubMed Google Scholar
- S. Nemecek
You can also search for this author in PubMed Google Scholar
- M. Nessi
You can also search for this author in PubMed Google Scholar
- M. S. Neubauer
You can also search for this author in PubMed Google Scholar
- F. Neuhaus
You can also search for this author in PubMed Google Scholar
- J. Neundorf
You can also search for this author in PubMed Google Scholar
- R. Newhouse
You can also search for this author in PubMed Google Scholar
- P. R. Newman
You can also search for this author in PubMed Google Scholar
- C. W. Ng
You can also search for this author in PubMed Google Scholar
- Y. S. Ng
You can also search for this author in PubMed Google Scholar
- Y. W. Y. Ng
You can also search for this author in PubMed Google Scholar
- B. Ngair
You can also search for this author in PubMed Google Scholar
- H. D. N. Nguyen
You can also search for this author in PubMed Google Scholar
- R. B. Nickerson
You can also search for this author in PubMed Google Scholar
- R. Nicolaidou
You can also search for this author in PubMed Google Scholar
- J. Nielsen
You can also search for this author in PubMed Google Scholar
- M. Niemeyer
You can also search for this author in PubMed Google Scholar
- N. Nikiforou
You can also search for this author in PubMed Google Scholar
- V. Nikolaenko
You can also search for this author in PubMed Google Scholar
- I. Nikolic-Audit
You can also search for this author in PubMed Google Scholar
- K. Nikolopoulos
You can also search for this author in PubMed Google Scholar
- P. Nilsson
You can also search for this author in PubMed Google Scholar
- I. Ninca
You can also search for this author in PubMed Google Scholar
- H. R. Nindhito
You can also search for this author in PubMed Google Scholar
- A. Nisati
You can also search for this author in PubMed Google Scholar
- N. Nishu
You can also search for this author in PubMed Google Scholar
- R. Nisius
You can also search for this author in PubMed Google Scholar
- J.-E. Nitschke
You can also search for this author in PubMed Google Scholar
- E. K. Nkadimeng
You can also search for this author in PubMed Google Scholar
- S. J. Noacco Rosende
You can also search for this author in PubMed Google Scholar
- T. Nobe
You can also search for this author in PubMed Google Scholar
- D. L. Noel
You can also search for this author in PubMed Google Scholar
- Y. Noguchi
You can also search for this author in PubMed Google Scholar
- T. Nommensen
You can also search for this author in PubMed Google Scholar
- M. A. Nomura
You can also search for this author in PubMed Google Scholar
- M. B. Norfolk
You can also search for this author in PubMed Google Scholar
- R. R. B. Norisam
You can also search for this author in PubMed Google Scholar
- B. J. Norman
You can also search for this author in PubMed Google Scholar
- J. Novak
You can also search for this author in PubMed Google Scholar
- T. Novak
You can also search for this author in PubMed Google Scholar
- O. Novgorodova
You can also search for this author in PubMed Google Scholar
- L. Novotny
You can also search for this author in PubMed Google Scholar
- R. Novotny
You can also search for this author in PubMed Google Scholar
- L. Nozka
You can also search for this author in PubMed Google Scholar
- K. Ntekas
You can also search for this author in PubMed Google Scholar
- N. M. J. Nunes De Moura Junior
You can also search for this author in PubMed Google Scholar
- E. Nurse
You can also search for this author in PubMed Google Scholar
- F. G. Oakham
You can also search for this author in PubMed Google Scholar
- J. Ocariz
You can also search for this author in PubMed Google Scholar
- A. Ochi
You can also search for this author in PubMed Google Scholar
- I. Ochoa
You can also search for this author in PubMed Google Scholar
- S. Oerdek
You can also search for this author in PubMed Google Scholar
- J. T. Offermann
You can also search for this author in PubMed Google Scholar
- A. Ogrodnik
You can also search for this author in PubMed Google Scholar
- A. Oh
You can also search for this author in PubMed Google Scholar
- C. C. Ohm
You can also search for this author in PubMed Google Scholar
- H. Oide
You can also search for this author in PubMed Google Scholar
- R. Oishi
You can also search for this author in PubMed Google Scholar
- M. L. Ojeda
You can also search for this author in PubMed Google Scholar
- Y. Okazaki
You can also search for this author in PubMed Google Scholar
- M. W. O’Keefe
You can also search for this author in PubMed Google Scholar
- Y. Okumura
You can also search for this author in PubMed Google Scholar
- A. Olariu
You can also search for this author in PubMed Google Scholar
- L. F. Oleiro Seabra
You can also search for this author in PubMed Google Scholar
- S. A. Olivares Pino
You can also search for this author in PubMed Google Scholar
- D. Oliveira Damazio
You can also search for this author in PubMed Google Scholar
- D. Oliveira Goncalves
You can also search for this author in PubMed Google Scholar
- J. L. Oliver
You can also search for this author in PubMed Google Scholar
- M. J. R. Olsson
You can also search for this author in PubMed Google Scholar
- A. Olszewski
You can also search for this author in PubMed Google Scholar
- J. Olszowska
You can also search for this author in PubMed Google Scholar
- Ö. O. Öncel
You can also search for this author in PubMed Google Scholar
- D. C. O’Neil
You can also search for this author in PubMed Google Scholar
- A. P. O’Neill
You can also search for this author in PubMed Google Scholar
- A. Onofre
You can also search for this author in PubMed Google Scholar
- P. U. E. Onyisi
You can also search for this author in PubMed Google Scholar
- M. J. Oreglia
You can also search for this author in PubMed Google Scholar
- G. E. Orellana
You can also search for this author in PubMed Google Scholar
- D. Orestano
You can also search for this author in PubMed Google Scholar
- N. Orlando
You can also search for this author in PubMed Google Scholar
- R. S. Orr
You can also search for this author in PubMed Google Scholar
- V. O’Shea
You can also search for this author in PubMed Google Scholar
- R. Ospanov
You can also search for this author in PubMed Google Scholar
- G. Otero y Garzon
You can also search for this author in PubMed Google Scholar
- H. Otono
You can also search for this author in PubMed Google Scholar
- P. S. Ott
You can also search for this author in PubMed Google Scholar
- G. J. Ottino
You can also search for this author in PubMed Google Scholar
- M. Ouchrif
You can also search for this author in PubMed Google Scholar
- J. Ouellette
You can also search for this author in PubMed Google Scholar
- F. Ould-Saada
You can also search for this author in PubMed Google Scholar
- M. Owen
You can also search for this author in PubMed Google Scholar
- R. E. Owen
You can also search for this author in PubMed Google Scholar
- K. Y. Oyulmaz
You can also search for this author in PubMed Google Scholar
- V. E. Ozcan
You can also search for this author in PubMed Google Scholar
- N. Ozturk
You can also search for this author in PubMed Google Scholar
- S. Ozturk
You can also search for this author in PubMed Google Scholar
- J. Pacalt
You can also search for this author in PubMed Google Scholar
- H. A. Pacey
You can also search for this author in PubMed Google Scholar
- K. Pachal
You can also search for this author in PubMed Google Scholar
- A. Pacheco Pages
You can also search for this author in PubMed Google Scholar
- C. Padilla Aranda
You can also search for this author in PubMed Google Scholar
- G. Padovano
You can also search for this author in PubMed Google Scholar
- S. Pagan Griso
You can also search for this author in PubMed Google Scholar
- G. Palacino
You can also search for this author in PubMed Google Scholar
- A. Palazzo
You can also search for this author in PubMed Google Scholar
- S. Palestini
You can also search for this author in PubMed Google Scholar
- J. Pan
You can also search for this author in PubMed Google Scholar
- T. Pan
You can also search for this author in PubMed Google Scholar
- D. K. Panchal
You can also search for this author in PubMed Google Scholar
- C. E. Pandini
You can also search for this author in PubMed Google Scholar
- J. G. Panduro Vazquez
You can also search for this author in PubMed Google Scholar
- H. Pang
You can also search for this author in PubMed Google Scholar
- P. Pani
You can also search for this author in PubMed Google Scholar
- G. Panizzo
You can also search for this author in PubMed Google Scholar
- L. Paolozzi
You can also search for this author in PubMed Google Scholar
- C. Papadatos
You can also search for this author in PubMed Google Scholar
- S. Parajuli
You can also search for this author in PubMed Google Scholar
- A. Paramonov
You can also search for this author in PubMed Google Scholar
- C. Paraskevopoulos
You can also search for this author in PubMed Google Scholar
- D. Paredes Hernandez
You can also search for this author in PubMed Google Scholar
- T. H. Park
You can also search for this author in PubMed Google Scholar
- M. A. Parker
You can also search for this author in PubMed Google Scholar
- F. Parodi
You can also search for this author in PubMed Google Scholar
- E. W. Parrish
You can also search for this author in PubMed Google Scholar
- V. A. Parrish
You can also search for this author in PubMed Google Scholar
- J. A. Parsons
You can also search for this author in PubMed Google Scholar
- U. Parzefall
You can also search for this author in PubMed Google Scholar
- B. Pascual Dias
You can also search for this author in PubMed Google Scholar
- L. Pascual Dominguez
You can also search for this author in PubMed Google Scholar
- V. R. Pascuzzi
You can also search for this author in PubMed Google Scholar
- F. Pasquali
You can also search for this author in PubMed Google Scholar
- E. Pasqualucci
You can also search for this author in PubMed Google Scholar
- S. Passaggio
You can also search for this author in PubMed Google Scholar
- F. Pastore
You can also search for this author in PubMed Google Scholar
- P. Pasuwan
You can also search for this author in PubMed Google Scholar
- P. Patel
You can also search for this author in PubMed Google Scholar
- J. R. Pater
You can also search for this author in PubMed Google Scholar
- T. Pauly
You can also search for this author in PubMed Google Scholar
- J. Pearkes
You can also search for this author in PubMed Google Scholar
- M. Pedersen
You can also search for this author in PubMed Google Scholar
- R. Pedro
You can also search for this author in PubMed Google Scholar
- S. V. Peleganchuk
You can also search for this author in PubMed Google Scholar
- O. Penc
You can also search for this author in PubMed Google Scholar
- E. A. Pender
You can also search for this author in PubMed Google Scholar
- C. Peng
You can also search for this author in PubMed Google Scholar
- H. Peng
You can also search for this author in PubMed Google Scholar
- K. E. Penski
You can also search for this author in PubMed Google Scholar
- M. Penzin
You can also search for this author in PubMed Google Scholar
- B. S. Peralva
You can also search for this author in PubMed Google Scholar
- A. P. Pereira Peixoto
You can also search for this author in PubMed Google Scholar
- L. Pereira Sanchez
You can also search for this author in PubMed Google Scholar
- D. V. Perepelitsa
You can also search for this author in PubMed Google Scholar
- E. Perez Codina
You can also search for this author in PubMed Google Scholar
- M. Perganti
You can also search for this author in PubMed Google Scholar
- L. Perini
You can also search for this author in PubMed Google Scholar
- H. Pernegger
You can also search for this author in PubMed Google Scholar
- S. Perrella
You can also search for this author in PubMed Google Scholar
- A. Perrevoort
You can also search for this author in PubMed Google Scholar
- O. Perrin
You can also search for this author in PubMed Google Scholar
- K. Peters
You can also search for this author in PubMed Google Scholar
- R. F. Y. Peters
You can also search for this author in PubMed Google Scholar
- B. A. Petersen
You can also search for this author in PubMed Google Scholar
- T. C. Petersen
You can also search for this author in PubMed Google Scholar
- E. Petit
You can also search for this author in PubMed Google Scholar
- V. Petousis
You can also search for this author in PubMed Google Scholar
- C. Petridou
You can also search for this author in PubMed Google Scholar
- A. Petrukhin
You can also search for this author in PubMed Google Scholar
- M. Pettee
You can also search for this author in PubMed Google Scholar
- N. E. Pettersson
You can also search for this author in PubMed Google Scholar
- A. Petukhov
You can also search for this author in PubMed Google Scholar
- K. Petukhova
You can also search for this author in PubMed Google Scholar
- A. Peyaud
You can also search for this author in PubMed Google Scholar
- R. Pezoa
You can also search for this author in PubMed Google Scholar
- L. Pezzotti
You can also search for this author in PubMed Google Scholar
- G. Pezzullo
You can also search for this author in PubMed Google Scholar
- T. M. Pham
You can also search for this author in PubMed Google Scholar
- T. Pham
You can also search for this author in PubMed Google Scholar
- P. W. Phillips
You can also search for this author in PubMed Google Scholar
- M. W. Phipps
You can also search for this author in PubMed Google Scholar
- G. Piacquadio
You can also search for this author in PubMed Google Scholar
- E. Pianori
You can also search for this author in PubMed Google Scholar
- F. Piazza
You can also search for this author in PubMed Google Scholar
- R. Piegaia
You can also search for this author in PubMed Google Scholar
- D. Pietreanu
You can also search for this author in PubMed Google Scholar
- A. D. Pilkington
You can also search for this author in PubMed Google Scholar
- M. Pinamonti
You can also search for this author in PubMed Google Scholar
- J. L. Pinfold
You can also search for this author in PubMed Google Scholar
- B. C. Pinheiro Pereira
You can also search for this author in PubMed Google Scholar
- C. Pitman Donaldson
You can also search for this author in PubMed Google Scholar
- D. A. Pizzi
You can also search for this author in PubMed Google Scholar
- L. Pizzimento
You can also search for this author in PubMed Google Scholar
- A. Pizzini
You can also search for this author in PubMed Google Scholar
- M. -A. Pleier
You can also search for this author in PubMed Google Scholar
- V. Plesanovs
You can also search for this author in PubMed Google Scholar
- V. Pleskot
You can also search for this author in PubMed Google Scholar
- E. Plotnikova
You can also search for this author in PubMed Google Scholar
- G. Poddar
You can also search for this author in PubMed Google Scholar
- R. Poettgen
You can also search for this author in PubMed Google Scholar
- L. Poggioli
You can also search for this author in PubMed Google Scholar
- I. Pogrebnyak
You can also search for this author in PubMed Google Scholar
- D. Pohl
You can also search for this author in PubMed Google Scholar
- I. Pokharel
You can also search for this author in PubMed Google Scholar
- S. Polacek
You can also search for this author in PubMed Google Scholar
- G. Polesello
You can also search for this author in PubMed Google Scholar
- A. Poley
You can also search for this author in PubMed Google Scholar
- R. Polifka
You can also search for this author in PubMed Google Scholar
- A. Polini
You can also search for this author in PubMed Google Scholar
- C. S. Pollard
You can also search for this author in PubMed Google Scholar
- Z. B. Pollock
You can also search for this author in PubMed Google Scholar
- V. Polychronakos
You can also search for this author in PubMed Google Scholar
- E. Pompa Pacchi
You can also search for this author in PubMed Google Scholar
- D. Ponomarenko
You can also search for this author in PubMed Google Scholar
- L. Pontecorvo
You can also search for this author in PubMed Google Scholar
- S. Popa
You can also search for this author in PubMed Google Scholar
- G. A. Popeneciu
You can also search for this author in PubMed Google Scholar
- D. M. Portillo Quintero
You can also search for this author in PubMed Google Scholar
- S. Pospisil
You can also search for this author in PubMed Google Scholar
- P. Postolache
You can also search for this author in PubMed Google Scholar
- K. Potamianos
You can also search for this author in PubMed Google Scholar
- I. N. Potrap
You can also search for this author in PubMed Google Scholar
- C. J. Potter
You can also search for this author in PubMed Google Scholar
- H. Potti
You can also search for this author in PubMed Google Scholar
- T. Poulsen
You can also search for this author in PubMed Google Scholar
- J. Poveda
You can also search for this author in PubMed Google Scholar
- M. E. Pozo Astigarraga
You can also search for this author in PubMed Google Scholar
- A. Prades Ibanez
You can also search for this author in PubMed Google Scholar
- M. M. Prapa
You can also search for this author in PubMed Google Scholar
- J. Pretel
You can also search for this author in PubMed Google Scholar
- D. Price
You can also search for this author in PubMed Google Scholar
- M. Primavera
You can also search for this author in PubMed Google Scholar
- M. A. Principe Martin
You can also search for this author in PubMed Google Scholar
- R. Privara
You can also search for this author in PubMed Google Scholar
- M. L. Proffitt
You can also search for this author in PubMed Google Scholar
- N. Proklova
You can also search for this author in PubMed Google Scholar
- K. Prokofiev
You can also search for this author in PubMed Google Scholar
- G. Proto
You can also search for this author in PubMed Google Scholar
- S. Protopopescu
You can also search for this author in PubMed Google Scholar
- J. Proudfoot
You can also search for this author in PubMed Google Scholar
- M. Przybycien
You can also search for this author in PubMed Google Scholar
- J. E. Puddefoot
You can also search for this author in PubMed Google Scholar
- D. Pudzha
You can also search for this author in PubMed Google Scholar
- P. Puzo
You can also search for this author in PubMed Google Scholar
- D. Pyatiizbyantseva
You can also search for this author in PubMed Google Scholar
- J. Qian
You can also search for this author in PubMed Google Scholar
- D. Qichen
You can also search for this author in PubMed Google Scholar
- Y. Qin
You can also search for this author in PubMed Google Scholar
- T. Qiu
You can also search for this author in PubMed Google Scholar
- A. Quadt
You can also search for this author in PubMed Google Scholar
- M. Queitsch-Maitland
You can also search for this author in PubMed Google Scholar
- G. Quetant
You can also search for this author in PubMed Google Scholar
- G. Rabanal Bolanos
You can also search for this author in PubMed Google Scholar
- D. Rafanoharana
You can also search for this author in PubMed Google Scholar
- F. Ragusa
You can also search for this author in PubMed Google Scholar
- J. L. Rainbolt
You can also search for this author in PubMed Google Scholar
- J. A. Raine
You can also search for this author in PubMed Google Scholar
- S. Rajagopalan
You can also search for this author in PubMed Google Scholar
- E. Ramakoti
You can also search for this author in PubMed Google Scholar
- K. Ran
You can also search for this author in PubMed Google Scholar
- N. P. Rapheeha
You can also search for this author in PubMed Google Scholar
- V. Raskina
You can also search for this author in PubMed Google Scholar
- D. F. Rassloff
You can also search for this author in PubMed Google Scholar
- S. Rave
You can also search for this author in PubMed Google Scholar
- B. Ravina
You can also search for this author in PubMed Google Scholar
- I. Ravinovich
You can also search for this author in PubMed Google Scholar
- M. Raymond
You can also search for this author in PubMed Google Scholar
- A. L. Read
You can also search for this author in PubMed Google Scholar
- N. P. Readioff
You can also search for this author in PubMed Google Scholar
- D. M. Rebuzzi
You can also search for this author in PubMed Google Scholar
- G. Redlinger
You can also search for this author in PubMed Google Scholar
- K. Reeves
You can also search for this author in PubMed Google Scholar
- J. A. Reidelsturz
You can also search for this author in PubMed Google Scholar
- D. Reikher
You can also search for this author in PubMed Google Scholar
- A. Rej
You can also search for this author in PubMed Google Scholar
- C. Rembser
You can also search for this author in PubMed Google Scholar
- A. Renardi
You can also search for this author in PubMed Google Scholar
- M. Renda
You can also search for this author in PubMed Google Scholar
- M. B. Rendel
You can also search for this author in PubMed Google Scholar
- F. Renner
You can also search for this author in PubMed Google Scholar
- A. G. Rennie
You can also search for this author in PubMed Google Scholar
- S. Resconi
You can also search for this author in PubMed Google Scholar
- M. Ressegotti
You can also search for this author in PubMed Google Scholar
- E. D. Resseguie
You can also search for this author in PubMed Google Scholar
- S. Rettie
You can also search for this author in PubMed Google Scholar
- J. G. Reyes Rivera
You can also search for this author in PubMed Google Scholar
- B. Reynolds
You can also search for this author in PubMed Google Scholar
- E. Reynolds
You can also search for this author in PubMed Google Scholar
- M. Rezaei Estabragh
You can also search for this author in PubMed Google Scholar
- O. L. Rezanova
You can also search for this author in PubMed Google Scholar
- P. Reznicek
You can also search for this author in PubMed Google Scholar
- N. Ribaric
You can also search for this author in PubMed Google Scholar
- E. Ricci
You can also search for this author in PubMed Google Scholar
- R. Richter
You can also search for this author in PubMed Google Scholar
- S. Richter
You can also search for this author in PubMed Google Scholar
- E. Richter-Was
You can also search for this author in PubMed Google Scholar
- M. Ridel
You can also search for this author in PubMed Google Scholar
- S. Ridouani
You can also search for this author in PubMed Google Scholar
- P. Rieck
You can also search for this author in PubMed Google Scholar
- P. Riedler
You can also search for this author in PubMed Google Scholar
- M. Rijssenbeek
You can also search for this author in PubMed Google Scholar
- A. Rimoldi
You can also search for this author in PubMed Google Scholar
- M. Rimoldi
You can also search for this author in PubMed Google Scholar
- L. Rinaldi
You can also search for this author in PubMed Google Scholar
- T. T. Rinn
You can also search for this author in PubMed Google Scholar
- M. P. Rinnagel
You can also search for this author in PubMed Google Scholar
- G. Ripellino
You can also search for this author in PubMed Google Scholar
- I. Riu
You can also search for this author in PubMed Google Scholar
- P. Rivadeneira
You can also search for this author in PubMed Google Scholar
- J. C. Rivera Vergara
You can also search for this author in PubMed Google Scholar
- F. Rizatdinova
You can also search for this author in PubMed Google Scholar
- E. Rizvi
You can also search for this author in PubMed Google Scholar
- C. Rizzi
You can also search for this author in PubMed Google Scholar
- B. A. Roberts
You can also search for this author in PubMed Google Scholar
- B. R. Roberts
You can also search for this author in PubMed Google Scholar
- S. H. Robertson
You can also search for this author in PubMed Google Scholar
- M. Robin
You can also search for this author in PubMed Google Scholar
- D. Robinson
You can also search for this author in PubMed Google Scholar
- C. M. Robles Gajardo
You can also search for this author in PubMed Google Scholar
- M. Robles Manzano
You can also search for this author in PubMed Google Scholar
- A. Robson
You can also search for this author in PubMed Google Scholar
- A. Rocchi
You can also search for this author in PubMed Google Scholar
- C. Roda
You can also search for this author in PubMed Google Scholar
- S. Rodriguez Bosca
You can also search for this author in PubMed Google Scholar
- Y. Rodriguez Garcia
You can also search for this author in PubMed Google Scholar
- A. Rodriguez Rodriguez
You can also search for this author in PubMed Google Scholar
- A. M. Rodríguez Vera
You can also search for this author in PubMed Google Scholar
- S. Roe
You can also search for this author in PubMed Google Scholar
- J. T. Roemer
You can also search for this author in PubMed Google Scholar
- A. R. Roepe-Gier
You can also search for this author in PubMed Google Scholar
- J. Roggel
You can also search for this author in PubMed Google Scholar
- O. Røhne
You can also search for this author in PubMed Google Scholar
- R. A. Rojas
You can also search for this author in PubMed Google Scholar
- B. Roland
You can also search for this author in PubMed Google Scholar
- C. P. A. Roland
You can also search for this author in PubMed Google Scholar
- J. Roloff
You can also search for this author in PubMed Google Scholar
- A. Romaniouk
You can also search for this author in PubMed Google Scholar
- E. Romano
You can also search for this author in PubMed Google Scholar
- M. Romano
You can also search for this author in PubMed Google Scholar
- A. C. Romero Hernandez
You can also search for this author in PubMed Google Scholar
- N. Rompotis
You can also search for this author in PubMed Google Scholar
- L. Roos
You can also search for this author in PubMed Google Scholar
- S. Rosati
You can also search for this author in PubMed Google Scholar
- B. J. Rosser
You can also search for this author in PubMed Google Scholar
- E. Rossi
You can also search for this author in PubMed Google Scholar
- E. Rossi
You can also search for this author in PubMed Google Scholar
- L. P. Rossi
You can also search for this author in PubMed Google Scholar
- L. Rossini
You can also search for this author in PubMed Google Scholar
- R. Rosten
You can also search for this author in PubMed Google Scholar
- M. Rotaru
You can also search for this author in PubMed Google Scholar
- B. Rottler
You can also search for this author in PubMed Google Scholar
- C. Rougier
You can also search for this author in PubMed Google Scholar
- D. Rousseau
You can also search for this author in PubMed Google Scholar
- D. Rousso
You can also search for this author in PubMed Google Scholar
- G. Rovelli
You can also search for this author in PubMed Google Scholar
- A. Roy
You can also search for this author in PubMed Google Scholar
- S. Roy-Garand
You can also search for this author in PubMed Google Scholar
- A. Rozanov
You can also search for this author in PubMed Google Scholar
- Y. Rozen
You can also search for this author in PubMed Google Scholar
- X. Ruan
You can also search for this author in PubMed Google Scholar
- A. Rubio Jimenez
You can also search for this author in PubMed Google Scholar
- A. J. Ruby
You can also search for this author in PubMed Google Scholar
- V. H. Ruelas Rivera
You can also search for this author in PubMed Google Scholar
- T. A. Ruggeri
You can also search for this author in PubMed Google Scholar
- F. Rühr
You can also search for this author in PubMed Google Scholar
- A. Ruiz-Martinez
You can also search for this author in PubMed Google Scholar
- A. Rummler
You can also search for this author in PubMed Google Scholar
- Z. Rurikova
You can also search for this author in PubMed Google Scholar
- N. A. Rusakovich
You can also search for this author in PubMed Google Scholar
- H. L. Russell
You can also search for this author in PubMed Google Scholar
- J. P. Rutherfoord
You can also search for this author in PubMed Google Scholar
- K. Rybacki
You can also search for this author in PubMed Google Scholar
- M. Rybar
You can also search for this author in PubMed Google Scholar
- E. B. Rye
You can also search for this author in PubMed Google Scholar
- A. Ryzhov
You can also search for this author in PubMed Google Scholar
- J. A. Sabater Iglesias
You can also search for this author in PubMed Google Scholar
- P. Sabatini
You can also search for this author in PubMed Google Scholar
- L. Sabetta
You can also search for this author in PubMed Google Scholar
- H. F.-W. Sadrozinski
You can also search for this author in PubMed Google Scholar
- F. Safai Tehrani
You can also search for this author in PubMed Google Scholar
- B. Safarzadeh Samani
You can also search for this author in PubMed Google Scholar
- M. Safdari
You can also search for this author in PubMed Google Scholar
- S. Saha
You can also search for this author in PubMed Google Scholar
- M. Sahinsoy
You can also search for this author in PubMed Google Scholar
- M. Saimpert
You can also search for this author in PubMed Google Scholar
- M. Saito
You can also search for this author in PubMed Google Scholar
- T. Saito
You can also search for this author in PubMed Google Scholar
- D. Salamani
You can also search for this author in PubMed Google Scholar
- G. Salamanna
You can also search for this author in PubMed Google Scholar
- A. Salnikov
You can also search for this author in PubMed Google Scholar
- J. Salt
You can also search for this author in PubMed Google Scholar
- A. Salvador Salas
You can also search for this author in PubMed Google Scholar
- D. Salvatore
You can also search for this author in PubMed Google Scholar
- F. Salvatore
You can also search for this author in PubMed Google Scholar
- A. Salzburger
You can also search for this author in PubMed Google Scholar
- D. Sammel
You can also search for this author in PubMed Google Scholar
- D. Sampsonidis
You can also search for this author in PubMed Google Scholar
- D. Sampsonidou
You can also search for this author in PubMed Google Scholar
- J. Sánchez
You can also search for this author in PubMed Google Scholar
- A. Sanchez Pineda
You can also search for this author in PubMed Google Scholar
- V. Sanchez Sebastian
You can also search for this author in PubMed Google Scholar
- H. Sandaker
You can also search for this author in PubMed Google Scholar
- C. O. Sander
You can also search for this author in PubMed Google Scholar
- J. A. Sandesara
You can also search for this author in PubMed Google Scholar
- M. Sandhoff
You can also search for this author in PubMed Google Scholar
- C. Sandoval
You can also search for this author in PubMed Google Scholar
- D. P. C. Sankey
You can also search for this author in PubMed Google Scholar
- T. Sano
You can also search for this author in PubMed Google Scholar
- A. Sansoni
You can also search for this author in PubMed Google Scholar
- L. Santi
You can also search for this author in PubMed Google Scholar
- C. Santoni
You can also search for this author in PubMed Google Scholar
- H. Santos
You can also search for this author in PubMed Google Scholar
- S. N. Santpur
You can also search for this author in PubMed Google Scholar
- A. Santra
You can also search for this author in PubMed Google Scholar
- K. A. Saoucha
You can also search for this author in PubMed Google Scholar
- J. G. Saraiva
You can also search for this author in PubMed Google Scholar
- J. Sardain
You can also search for this author in PubMed Google Scholar
- O. Sasaki
You can also search for this author in PubMed Google Scholar
- K. Sato
You can also search for this author in PubMed Google Scholar
- C. Sauer
You can also search for this author in PubMed Google Scholar
- F. Sauerburger
You can also search for this author in PubMed Google Scholar
- E. Sauvan
You can also search for this author in PubMed Google Scholar
- P. Savard
You can also search for this author in PubMed Google Scholar
- R. Sawada
You can also search for this author in PubMed Google Scholar
- C. Sawyer
You can also search for this author in PubMed Google Scholar
- L. Sawyer
You can also search for this author in PubMed Google Scholar
- I. Sayago Galvan
You can also search for this author in PubMed Google Scholar
- C. Sbarra
You can also search for this author in PubMed Google Scholar
- A. Sbrizzi
You can also search for this author in PubMed Google Scholar
- T. Scanlon
You can also search for this author in PubMed Google Scholar
- J. Schaarschmidt
You can also search for this author in PubMed Google Scholar
- P. Schacht
You can also search for this author in PubMed Google Scholar
- D. Schaefer
You can also search for this author in PubMed Google Scholar
- U. Schäfer
You can also search for this author in PubMed Google Scholar
- A. C. Schaffer
You can also search for this author in PubMed Google Scholar
- D. Schaile
You can also search for this author in PubMed Google Scholar
- R. D. Schamberger
You can also search for this author in PubMed Google Scholar
- E. Schanet
You can also search for this author in PubMed Google Scholar
- C. Scharf
You can also search for this author in PubMed Google Scholar
- M. M. Schefer
You can also search for this author in PubMed Google Scholar
- V. A. Schegelsky
You can also search for this author in PubMed Google Scholar
- D. Scheirich
You can also search for this author in PubMed Google Scholar
- F. Schenck
You can also search for this author in PubMed Google Scholar
- M. Schernau
You can also search for this author in PubMed Google Scholar
- C. Scheulen
You can also search for this author in PubMed Google Scholar
- C. Schiavi
You can also search for this author in PubMed Google Scholar
- Z. M. Schillaci
You can also search for this author in PubMed Google Scholar
- E. J. Schioppa
You can also search for this author in PubMed Google Scholar
- M. Schioppa
You can also search for this author in PubMed Google Scholar
- B. Schlag
You can also search for this author in PubMed Google Scholar
- K. E. Schleicher
You can also search for this author in PubMed Google Scholar
- S. Schlenker
You can also search for this author in PubMed Google Scholar
- J. Schmeing
You can also search for this author in PubMed Google Scholar
- M. A. Schmidt
You can also search for this author in PubMed Google Scholar
- K. Schmieden
You can also search for this author in PubMed Google Scholar
- C. Schmitt
You can also search for this author in PubMed Google Scholar
- S. Schmitt
You can also search for this author in PubMed Google Scholar
- L. Schoeffel
You can also search for this author in PubMed Google Scholar
- A. Schoening
You can also search for this author in PubMed Google Scholar
- P. G. Scholer
You can also search for this author in PubMed Google Scholar
- E. Schopf
You can also search for this author in PubMed Google Scholar
- M. Schott
You can also search for this author in PubMed Google Scholar
- J. Schovancova
You can also search for this author in PubMed Google Scholar
- S. Schramm
You can also search for this author in PubMed Google Scholar
- F. Schroeder
You can also search for this author in PubMed Google Scholar
- H.-C. Schultz-Coulon
You can also search for this author in PubMed Google Scholar
- M. Schumacher
You can also search for this author in PubMed Google Scholar
- B. A. Schumm
You can also search for this author in PubMed Google Scholar
- Ph. Schune
You can also search for this author in PubMed Google Scholar
- H. R. Schwartz
You can also search for this author in PubMed Google Scholar
- A. Schwartzman
You can also search for this author in PubMed Google Scholar
- T. A. Schwarz
You can also search for this author in PubMed Google Scholar
- Ph. Schwemling
You can also search for this author in PubMed Google Scholar
- R. Schwienhorst
You can also search for this author in PubMed Google Scholar
- A. Sciandra
You can also search for this author in PubMed Google Scholar
- G. Sciolla
You can also search for this author in PubMed Google Scholar
- F. Scuri
You can also search for this author in PubMed Google Scholar
- F. Scutti
You can also search for this author in PubMed Google Scholar
- C. D. Sebastiani
You can also search for this author in PubMed Google Scholar
- K. Sedlaczek
You can also search for this author in PubMed Google Scholar
- P. Seema
You can also search for this author in PubMed Google Scholar
- S. C. Seidel
You can also search for this author in PubMed Google Scholar
- A. Seiden
You can also search for this author in PubMed Google Scholar
- B. D. Seidlitz
You can also search for this author in PubMed Google Scholar
- C. Seitz
You can also search for this author in PubMed Google Scholar
- J. M. Seixas
You can also search for this author in PubMed Google Scholar
- G. Sekhniaidze
You can also search for this author in PubMed Google Scholar
- S. J. Sekula
You can also search for this author in PubMed Google Scholar
- L. Selem
You can also search for this author in PubMed Google Scholar
- N. Semprini-Cesari
You can also search for this author in PubMed Google Scholar
- S. Sen
You can also search for this author in PubMed Google Scholar
- D. Sengupta
You can also search for this author in PubMed Google Scholar
- V. Senthilkumar
You can also search for this author in PubMed Google Scholar
- L. Serin
You can also search for this author in PubMed Google Scholar
- L. Serkin
You can also search for this author in PubMed Google Scholar
- M. Sessa
You can also search for this author in PubMed Google Scholar
- H. Severini
You can also search for this author in PubMed Google Scholar
- F. Sforza
You can also search for this author in PubMed Google Scholar
- A. Sfyrla
You can also search for this author in PubMed Google Scholar
- E. Shabalina
You can also search for this author in PubMed Google Scholar
- R. Shaheen
You can also search for this author in PubMed Google Scholar
- J. D. Shahinian
You can also search for this author in PubMed Google Scholar
- D. Shaked Renous
You can also search for this author in PubMed Google Scholar
- L. Y. Shan
You can also search for this author in PubMed Google Scholar
- M. Shapiro
You can also search for this author in PubMed Google Scholar
- A. Sharma
You can also search for this author in PubMed Google Scholar
- A. S. Sharma
You can also search for this author in PubMed Google Scholar
- P. Sharma
You can also search for this author in PubMed Google Scholar
- S. Sharma
You can also search for this author in PubMed Google Scholar
- P. B. Shatalov
You can also search for this author in PubMed Google Scholar
- K. Shaw
You can also search for this author in PubMed Google Scholar
- S. M. Shaw
You can also search for this author in PubMed Google Scholar
- Q. Shen
You can also search for this author in PubMed Google Scholar
- P. Sherwood
You can also search for this author in PubMed Google Scholar
- L. Shi
You can also search for this author in PubMed Google Scholar
- C. O. Shimmin
You can also search for this author in PubMed Google Scholar
- Y. Shimogama
You can also search for this author in PubMed Google Scholar
- J. D. Shinner
You can also search for this author in PubMed Google Scholar
- I. P. J. Shipsey
You can also search for this author in PubMed Google Scholar
- S. Shirabe
You can also search for this author in PubMed Google Scholar
- M. Shiyakova
You can also search for this author in PubMed Google Scholar
- J. Shlomi
You can also search for this author in PubMed Google Scholar
- M. J. Shochet
You can also search for this author in PubMed Google Scholar
- J. Shojaii
You can also search for this author in PubMed Google Scholar
- D. R. Shope
You can also search for this author in PubMed Google Scholar
- S. Shrestha
You can also search for this author in PubMed Google Scholar
- E. M. Shrif
You can also search for this author in PubMed Google Scholar
- M. J. Shroff
You can also search for this author in PubMed Google Scholar
- P. Sicho
You can also search for this author in PubMed Google Scholar
- A. M. Sickles
You can also search for this author in PubMed Google Scholar
- E. Sideras Haddad
You can also search for this author in PubMed Google Scholar
- A. Sidoti
You can also search for this author in PubMed Google Scholar
- F. Siegert
You can also search for this author in PubMed Google Scholar
- Dj. Sijacki
You can also search for this author in PubMed Google Scholar
- R. Sikora
You can also search for this author in PubMed Google Scholar
- F. Sili
You can also search for this author in PubMed Google Scholar
- J. M. Silva
You can also search for this author in PubMed Google Scholar
- M. V. Silva Oliveira
You can also search for this author in PubMed Google Scholar
- S. B. Silverstein
You can also search for this author in PubMed Google Scholar
- S. Simion
You can also search for this author in PubMed Google Scholar
- R. Simoniello
You can also search for this author in PubMed Google Scholar
- E. L. Simpson
You can also search for this author in PubMed Google Scholar
- H. Simpson
You can also search for this author in PubMed Google Scholar
- L. R. Simpson
You can also search for this author in PubMed Google Scholar
- N. D. Simpson
You can also search for this author in PubMed Google Scholar
- S. Simsek
You can also search for this author in PubMed Google Scholar
- S. Sindhu
You can also search for this author in PubMed Google Scholar
- P. Sinervo
You can also search for this author in PubMed Google Scholar
- S. Singh
You can also search for this author in PubMed Google Scholar
- S. Singh
You can also search for this author in PubMed Google Scholar
- S. Sinha
You can also search for this author in PubMed Google Scholar
- S. Sinha
You can also search for this author in PubMed Google Scholar
- M. Sioli
You can also search for this author in PubMed Google Scholar
- I. Siral
You can also search for this author in PubMed Google Scholar
- S. Yu. Sivoklokov
You can also search for this author in PubMed Google Scholar
- J. Sjölin
You can also search for this author in PubMed Google Scholar
- A. Skaf
You can also search for this author in PubMed Google Scholar
- E. Skorda
You can also search for this author in PubMed Google Scholar
- P. Skubic
You can also search for this author in PubMed Google Scholar
- M. Slawinska
You can also search for this author in PubMed Google Scholar
- V. Smakhtin
You can also search for this author in PubMed Google Scholar
- B. H. Smart
You can also search for this author in PubMed Google Scholar
- J. Smiesko
You can also search for this author in PubMed Google Scholar
- S. Yu. Smirnov
You can also search for this author in PubMed Google Scholar
- Y. Smirnov
You can also search for this author in PubMed Google Scholar
- L. N. Smirnova
You can also search for this author in PubMed Google Scholar
- O. Smirnova
You can also search for this author in PubMed Google Scholar
- A. C. Smith
You can also search for this author in PubMed Google Scholar
- E. A. Smith
You can also search for this author in PubMed Google Scholar
- H. A. Smith
You can also search for this author in PubMed Google Scholar
- J. L. Smith
You can also search for this author in PubMed Google Scholar
- R. Smith
You can also search for this author in PubMed Google Scholar
- M. Smizanska
You can also search for this author in PubMed Google Scholar
- K. Smolek
You can also search for this author in PubMed Google Scholar
- A. Smykiewicz
You can also search for this author in PubMed Google Scholar
- A. A. Snesarev
You can also search for this author in PubMed Google Scholar
- H. L. Snoek
You can also search for this author in PubMed Google Scholar
- S. Snyder
You can also search for this author in PubMed Google Scholar
- R. Sobie
You can also search for this author in PubMed Google Scholar
- A. Soffer
You can also search for this author in PubMed Google Scholar
- C. A. Solans Sanchez
You can also search for this author in PubMed Google Scholar
- E. Yu. Soldatov
You can also search for this author in PubMed Google Scholar
- U. Soldevila
You can also search for this author in PubMed Google Scholar
- A. A. Solodkov
You can also search for this author in PubMed Google Scholar
- S. Solomon
You can also search for this author in PubMed Google Scholar
- A. Soloshenko
You can also search for this author in PubMed Google Scholar
- K. Solovieva
You can also search for this author in PubMed Google Scholar
- O. V. Solovyanov
You can also search for this author in PubMed Google Scholar
- V. Solovyev
You can also search for this author in PubMed Google Scholar
- P. Sommer
You can also search for this author in PubMed Google Scholar
- A. Sonay
You can also search for this author in PubMed Google Scholar
- W. Y. Song
You can also search for this author in PubMed Google Scholar
- J. M. Sonneveld
You can also search for this author in PubMed Google Scholar
- A. Sopczak
You can also search for this author in PubMed Google Scholar
- A. L. Sopio
You can also search for this author in PubMed Google Scholar
- F. Sopkova
You can also search for this author in PubMed Google Scholar
- V. Sothilingam
You can also search for this author in PubMed Google Scholar
- S. Sottocornola
You can also search for this author in PubMed Google Scholar
- R. Soualah
You can also search for this author in PubMed Google Scholar
- Z. Soumaimi
You can also search for this author in PubMed Google Scholar
- D. South
You can also search for this author in PubMed Google Scholar
- S. Spagnolo
You can also search for this author in PubMed Google Scholar
- M. Spalla
You can also search for this author in PubMed Google Scholar
- F. Spanò
You can also search for this author in PubMed Google Scholar
- D. Sperlich
You can also search for this author in PubMed Google Scholar
- G. Spigo
You can also search for this author in PubMed Google Scholar
- M. Spina
You can also search for this author in PubMed Google Scholar
- S. Spinali
You can also search for this author in PubMed Google Scholar
- D. P. Spiteri
You can also search for this author in PubMed Google Scholar
- M. Spousta
You can also search for this author in PubMed Google Scholar
- E. J. Staats
You can also search for this author in PubMed Google Scholar
- A. Stabile
You can also search for this author in PubMed Google Scholar
- R. Stamen
You can also search for this author in PubMed Google Scholar
- M. Stamenkovic
You can also search for this author in PubMed Google Scholar
- A. Stampekis
You can also search for this author in PubMed Google Scholar
- M. Standke
You can also search for this author in PubMed Google Scholar
- E. Stanecka
You can also search for this author in PubMed Google Scholar
- M. V. Stange
You can also search for this author in PubMed Google Scholar
- B. Stanislaus
You can also search for this author in PubMed Google Scholar
- M. M. Stanitzki
You can also search for this author in PubMed Google Scholar
- M. Stankaityte
You can also search for this author in PubMed Google Scholar
- B. Stapf
You can also search for this author in PubMed Google Scholar
- E. A. Starchenko
You can also search for this author in PubMed Google Scholar
- G. H. Stark
You can also search for this author in PubMed Google Scholar
- J. Stark
You can also search for this author in PubMed Google Scholar
- D. M. Starko
You can also search for this author in PubMed Google Scholar
- P. Staroba
You can also search for this author in PubMed Google Scholar
- P. Starovoitov
You can also search for this author in PubMed Google Scholar
- S. Stärz
You can also search for this author in PubMed Google Scholar
- R. Staszewski
You can also search for this author in PubMed Google Scholar
- G. Stavropoulos
You can also search for this author in PubMed Google Scholar
- J. Steentoft
You can also search for this author in PubMed Google Scholar
- P. Steinberg
You can also search for this author in PubMed Google Scholar
- A. L. Steinhebel
You can also search for this author in PubMed Google Scholar
- B. Stelzer
You can also search for this author in PubMed Google Scholar
- H. J. Stelzer
You can also search for this author in PubMed Google Scholar
- O. Stelzer-Chilton
You can also search for this author in PubMed Google Scholar
- H. Stenzel
You can also search for this author in PubMed Google Scholar
- T. J. Stevenson
You can also search for this author in PubMed Google Scholar
- G. A. Stewart
You can also search for this author in PubMed Google Scholar
- M. C. Stockton
You can also search for this author in PubMed Google Scholar
- G. Stoicea
You can also search for this author in PubMed Google Scholar
- M. Stolarski
You can also search for this author in PubMed Google Scholar
- S. Stonjek
You can also search for this author in PubMed Google Scholar
- A. Straessner
You can also search for this author in PubMed Google Scholar
- J. Strandberg
You can also search for this author in PubMed Google Scholar
- S. Strandberg
You can also search for this author in PubMed Google Scholar
- M. Strauss
You can also search for this author in PubMed Google Scholar
- T. Strebler
You can also search for this author in PubMed Google Scholar
- P. Strizenec
You can also search for this author in PubMed Google Scholar
- R. Ströhmer
You can also search for this author in PubMed Google Scholar
- D. M. Strom
You can also search for this author in PubMed Google Scholar
- L. R. Strom
You can also search for this author in PubMed Google Scholar
- R. Stroynowski
You can also search for this author in PubMed Google Scholar
- A. Strubig
You can also search for this author in PubMed Google Scholar
- S. A. Stucci
You can also search for this author in PubMed Google Scholar
- B. Stugu
You can also search for this author in PubMed Google Scholar
- J. Stupak
You can also search for this author in PubMed Google Scholar
- N. A. Styles
You can also search for this author in PubMed Google Scholar
- D. Su
You can also search for this author in PubMed Google Scholar
- S. Su
You can also search for this author in PubMed Google Scholar
- W. Su
You can also search for this author in PubMed Google Scholar
- X. Su
You can also search for this author in PubMed Google Scholar
- K. Sugizaki
You can also search for this author in PubMed Google Scholar
- V. V. Sulin
You can also search for this author in PubMed Google Scholar
- M. J. Sullivan
You can also search for this author in PubMed Google Scholar
- D. M. S. Sultan
You can also search for this author in PubMed Google Scholar
- L. Sultanaliyeva
You can also search for this author in PubMed Google Scholar
- S. Sultansoy
You can also search for this author in PubMed Google Scholar
- T. Sumida
You can also search for this author in PubMed Google Scholar
- S. Sun
You can also search for this author in PubMed Google Scholar
- S. Sun
You can also search for this author in PubMed Google Scholar
- O. Sunneborn Gudnadottir
You can also search for this author in PubMed Google Scholar
- M. R. Sutton
You can also search for this author in PubMed Google Scholar
- M. Svatos
You can also search for this author in PubMed Google Scholar
- M. Swiatlowski
You can also search for this author in PubMed Google Scholar
- T. Swirski
You can also search for this author in PubMed Google Scholar
- I. Sykora
You can also search for this author in PubMed Google Scholar
- M. Sykora
You can also search for this author in PubMed Google Scholar
- T. Sykora
You can also search for this author in PubMed Google Scholar
- D. Ta
You can also search for this author in PubMed Google Scholar
- K. Tackmann
You can also search for this author in PubMed Google Scholar
- A. Taffard
You can also search for this author in PubMed Google Scholar
- R. Tafirout
You can also search for this author in PubMed Google Scholar
- J. S. Tafoya Vargas
You can also search for this author in PubMed Google Scholar
- R. H. M. Taibah
You can also search for this author in PubMed Google Scholar
- R. Takashima
You can also search for this author in PubMed Google Scholar
- K. Takeda
You can also search for this author in PubMed Google Scholar
- E. P. Takeva
You can also search for this author in PubMed Google Scholar
- Y. Takubo
You can also search for this author in PubMed Google Scholar
- M. Talby
You can also search for this author in PubMed Google Scholar
- A. A. Talyshev
You can also search for this author in PubMed Google Scholar
- K. C. Tam
You can also search for this author in PubMed Google Scholar
- N. M. Tamir
You can also search for this author in PubMed Google Scholar
- A. Tanaka
You can also search for this author in PubMed Google Scholar
- J. Tanaka
You can also search for this author in PubMed Google Scholar
- R. Tanaka
You can also search for this author in PubMed Google Scholar
- M. Tanasini
You can also search for this author in PubMed Google Scholar
- J. Tang
You can also search for this author in PubMed Google Scholar
- Z. Tao
You can also search for this author in PubMed Google Scholar
- S. Tapia Araya
You can also search for this author in PubMed Google Scholar
- S. Tapprogge
You can also search for this author in PubMed Google Scholar
- A. Tarek Abouelfadl Mohamed
You can also search for this author in PubMed Google Scholar
- S. Tarem
You can also search for this author in PubMed Google Scholar
- K. Tariq
You can also search for this author in PubMed Google Scholar
- G. Tarna
You can also search for this author in PubMed Google Scholar
- G. F. Tartarelli
You can also search for this author in PubMed Google Scholar
- P. Tas
You can also search for this author in PubMed Google Scholar
- M. Tasevsky
You can also search for this author in PubMed Google Scholar
- E. Tassi
You can also search for this author in PubMed Google Scholar
- A. C. Tate
You can also search for this author in PubMed Google Scholar
- G. Tateno
You can also search for this author in PubMed Google Scholar
- Y. Tayalati
You can also search for this author in PubMed Google Scholar
- G. N. Taylor
You can also search for this author in PubMed Google Scholar
- W. Taylor
You can also search for this author in PubMed Google Scholar
- H. Teagle
You can also search for this author in PubMed Google Scholar
- A. S. Tee
You can also search for this author in PubMed Google Scholar
- R. Teixeira De Lima
You can also search for this author in PubMed Google Scholar
- P. Teixeira-Dias
You can also search for this author in PubMed Google Scholar
- J. J. Teoh
You can also search for this author in PubMed Google Scholar
- K. Terashi
You can also search for this author in PubMed Google Scholar
- J. Terron
You can also search for this author in PubMed Google Scholar
- S. Terzo
You can also search for this author in PubMed Google Scholar
- M. Testa
You can also search for this author in PubMed Google Scholar
- R. J. Teuscher
You can also search for this author in PubMed Google Scholar
- A. Thaler
You can also search for this author in PubMed Google Scholar
- O. Theiner
You can also search for this author in PubMed Google Scholar
- N. Themistokleous
You can also search for this author in PubMed Google Scholar
- T. Theveneaux-Pelzer
You can also search for this author in PubMed Google Scholar
- O. Thielmann
You can also search for this author in PubMed Google Scholar
- D. W. Thomas
You can also search for this author in PubMed Google Scholar
- J. P. Thomas
You can also search for this author in PubMed Google Scholar
- E. A. Thompson
You can also search for this author in PubMed Google Scholar
- P. D. Thompson
You can also search for this author in PubMed Google Scholar
- E. Thomson
You can also search for this author in PubMed Google Scholar
- E. J. Thorpe
You can also search for this author in PubMed Google Scholar
- Y. Tian
You can also search for this author in PubMed Google Scholar
- V. Tikhomirov
You can also search for this author in PubMed Google Scholar
- Yu. A. Tikhonov
You can also search for this author in PubMed Google Scholar
- S. Timoshenko
You can also search for this author in PubMed Google Scholar
- E. X. L. Ting
You can also search for this author in PubMed Google Scholar
- P. Tipton
You can also search for this author in PubMed Google Scholar
- S. Tisserant
You can also search for this author in PubMed Google Scholar
- S. H. Tlou
You can also search for this author in PubMed Google Scholar
- A. Tnourji
You can also search for this author in PubMed Google Scholar
- K. Todome
You can also search for this author in PubMed Google Scholar
- S. Todorova-Nova
You can also search for this author in PubMed Google Scholar
- S. Todt
You can also search for this author in PubMed Google Scholar
- M. Togawa
You can also search for this author in PubMed Google Scholar
- J. Tojo
You can also search for this author in PubMed Google Scholar
- S. Tokár
You can also search for this author in PubMed Google Scholar
- K. Tokushuku
You can also search for this author in PubMed Google Scholar
- O. Toldaiev
You can also search for this author in PubMed Google Scholar
- R. Tombs
You can also search for this author in PubMed Google Scholar
- M. Tomoto
You can also search for this author in PubMed Google Scholar
- L. Tompkins
You can also search for this author in PubMed Google Scholar
- K. W. Topolnicki
You can also search for this author in PubMed Google Scholar
- P. Tornambe
You can also search for this author in PubMed Google Scholar
- E. Torrence
You can also search for this author in PubMed Google Scholar
- H. Torres
You can also search for this author in PubMed Google Scholar
- E. Torró Pastor
You can also search for this author in PubMed Google Scholar
- M. Toscani
You can also search for this author in PubMed Google Scholar
- C. Tosciri
You can also search for this author in PubMed Google Scholar
- M. Tost
You can also search for this author in PubMed Google Scholar
- D. R. Tovey
You can also search for this author in PubMed Google Scholar
- A. Traeet
You can also search for this author in PubMed Google Scholar
- I. S. Trandafir
You can also search for this author in PubMed Google Scholar
- T. Trefzger
You can also search for this author in PubMed Google Scholar
- A. Tricoli
You can also search for this author in PubMed Google Scholar
- I. M. Trigger
You can also search for this author in PubMed Google Scholar
- S. Trincaz-Duvoid
You can also search for this author in PubMed Google Scholar
- D. A. Trischuk
You can also search for this author in PubMed Google Scholar
- B. Trocmé
You can also search for this author in PubMed Google Scholar
- C. Troncon
You can also search for this author in PubMed Google Scholar
- L. Truong
You can also search for this author in PubMed Google Scholar
- M. Trzebinski
You can also search for this author in PubMed Google Scholar
- A. Trzupek
You can also search for this author in PubMed Google Scholar
- F. Tsai
You can also search for this author in PubMed Google Scholar
- M. Tsai
You can also search for this author in PubMed Google Scholar
- A. Tsiamis
You can also search for this author in PubMed Google Scholar
- P. V. Tsiareshka
You can also search for this author in PubMed Google Scholar
- S. Tsigaridas
You can also search for this author in PubMed Google Scholar
- A. Tsirigotis
You can also search for this author in PubMed Google Scholar
- V. Tsiskaridze
You can also search for this author in PubMed Google Scholar
- E. G. Tskhadadze
You can also search for this author in PubMed Google Scholar
- M. Tsopoulou
You can also search for this author in PubMed Google Scholar
- Y. Tsujikawa
You can also search for this author in PubMed Google Scholar
- I. I. Tsukerman
You can also search for this author in PubMed Google Scholar
- V. Tsulaia
You can also search for this author in PubMed Google Scholar
- S. Tsuno
You can also search for this author in PubMed Google Scholar
- O. Tsur
You can also search for this author in PubMed Google Scholar
- D. Tsybychev
You can also search for this author in PubMed Google Scholar
- Y. Tu
You can also search for this author in PubMed Google Scholar
- A. Tudorache
You can also search for this author in PubMed Google Scholar
- V. Tudorache
You can also search for this author in PubMed Google Scholar
- A. N. Tuna
You can also search for this author in PubMed Google Scholar
- S. Turchikhin
You can also search for this author in PubMed Google Scholar
- I. Turk Cakir
You can also search for this author in PubMed Google Scholar
- R. Turra
You can also search for this author in PubMed Google Scholar
- T. Turtuvshin
You can also search for this author in PubMed Google Scholar
- P. M. Tuts
You can also search for this author in PubMed Google Scholar
- S. Tzamarias
You can also search for this author in PubMed Google Scholar
- P. Tzanis
You can also search for this author in PubMed Google Scholar
- E. Tzovara
You can also search for this author in PubMed Google Scholar
- K. Uchida
You can also search for this author in PubMed Google Scholar
- F. Ukegawa
You can also search for this author in PubMed Google Scholar
- P. A. Ulloa Poblete
You can also search for this author in PubMed Google Scholar
- E. N. Umaka
You can also search for this author in PubMed Google Scholar
- G. Unal
You can also search for this author in PubMed Google Scholar
- M. Unal
You can also search for this author in PubMed Google Scholar
- A. Undrus
You can also search for this author in PubMed Google Scholar
- G. Unel
You can also search for this author in PubMed Google Scholar
- J. Urban
You can also search for this author in PubMed Google Scholar
- P. Urquijo
You can also search for this author in PubMed Google Scholar
- G. Usai
You can also search for this author in PubMed Google Scholar
- R. Ushioda
You can also search for this author in PubMed Google Scholar
- M. Usman
You can also search for this author in PubMed Google Scholar
- Z. Uysal
You can also search for this author in PubMed Google Scholar
- L. Vacavant
You can also search for this author in PubMed Google Scholar
- V. Vacek
You can also search for this author in PubMed Google Scholar
- B. Vachon
You can also search for this author in PubMed Google Scholar
- K. O. H. Vadla
You can also search for this author in PubMed Google Scholar
- T. Vafeiadis
You can also search for this author in PubMed Google Scholar
- A. Vaitkus
You can also search for this author in PubMed Google Scholar
- C. Valderanis
You can also search for this author in PubMed Google Scholar
- E. Valdes Santurio
You can also search for this author in PubMed Google Scholar
- M. Valente
You can also search for this author in PubMed Google Scholar
- S. Valentinetti
You can also search for this author in PubMed Google Scholar
- A. Valero
You can also search for this author in PubMed Google Scholar
- A. Vallier
You can also search for this author in PubMed Google Scholar
- J. A. Valls Ferrer
You can also search for this author in PubMed Google Scholar
- D. R. Van Arneman
You can also search for this author in PubMed Google Scholar
- T. R. Van Daalen
You can also search for this author in PubMed Google Scholar
- P. Van Gemmeren
You can also search for this author in PubMed Google Scholar
- M. Van Rijnbach
You can also search for this author in PubMed Google Scholar
- S. Van Stroud
You can also search for this author in PubMed Google Scholar
- I. Van Vulpen
You can also search for this author in PubMed Google Scholar
- M. Vanadia
You can also search for this author in PubMed Google Scholar
- W. Vandelli
You can also search for this author in PubMed Google Scholar
- M. Vandenbroucke
You can also search for this author in PubMed Google Scholar
- E. R. Vandewall
You can also search for this author in PubMed Google Scholar
- D. Vannicola
You can also search for this author in PubMed Google Scholar
- L. Vannoli
You can also search for this author in PubMed Google Scholar
- R. Vari
You can also search for this author in PubMed Google Scholar
- E. W. Varnes
You can also search for this author in PubMed Google Scholar
- C. Varni
You can also search for this author in PubMed Google Scholar
- T. Varol
You can also search for this author in PubMed Google Scholar
- D. Varouchas
You can also search for this author in PubMed Google Scholar
- L. Varriale
You can also search for this author in PubMed Google Scholar
- K. E. Varvell
You can also search for this author in PubMed Google Scholar
- M. E. Vasile
You can also search for this author in PubMed Google Scholar
- L. Vaslin
You can also search for this author in PubMed Google Scholar
- G. A. Vasquez
You can also search for this author in PubMed Google Scholar
- F. Vazeille
You can also search for this author in PubMed Google Scholar
- T. Vazquez Schroeder
You can also search for this author in PubMed Google Scholar
- J. Veatch
You can also search for this author in PubMed Google Scholar
- V. Vecchio
You can also search for this author in PubMed Google Scholar
- M. J. Veen
You can also search for this author in PubMed Google Scholar
- I. Veliscek
You can also search for this author in PubMed Google Scholar
- L. M. Veloce
You can also search for this author in PubMed Google Scholar
- F. Veloso
You can also search for this author in PubMed Google Scholar
- S. Veneziano
You can also search for this author in PubMed Google Scholar
- A. Ventura
You can also search for this author in PubMed Google Scholar
- A. Verbytskyi
You can also search for this author in PubMed Google Scholar
- M. Verducci
You can also search for this author in PubMed Google Scholar
- C. Vergis
You can also search for this author in PubMed Google Scholar
- M. Verissimo De Araujo
You can also search for this author in PubMed Google Scholar
- W. Verkerke
You can also search for this author in PubMed Google Scholar
- J. C. Vermeulen
You can also search for this author in PubMed Google Scholar
- C. Vernieri
You can also search for this author in PubMed Google Scholar
- P. J. Verschuuren
You can also search for this author in PubMed Google Scholar
- M. Vessella
You can also search for this author in PubMed Google Scholar
- M. C. Vetterli
You can also search for this author in PubMed Google Scholar
- A. Vgenopoulos
You can also search for this author in PubMed Google Scholar
- N. Viaux Maira
You can also search for this author in PubMed Google Scholar
- T. Vickey
You can also search for this author in PubMed Google Scholar
- O. E. Vickey Boeriu
You can also search for this author in PubMed Google Scholar
- G. H. A. Viehhauser
You can also search for this author in PubMed Google Scholar
- L. Vigani
You can also search for this author in PubMed Google Scholar
- M. Villa
You can also search for this author in PubMed Google Scholar
- M. Villaplana Perez
You can also search for this author in PubMed Google Scholar
- E. M. Villhauer
You can also search for this author in PubMed Google Scholar
- E. Vilucchi
You can also search for this author in PubMed Google Scholar
- M. G. Vincter
You can also search for this author in PubMed Google Scholar
- G. S. Virdee
You can also search for this author in PubMed Google Scholar
- A. Vishwakarma
You can also search for this author in PubMed Google Scholar
- C. Vittori
You can also search for this author in PubMed Google Scholar
- I. Vivarelli
You can also search for this author in PubMed Google Scholar
- V. Vladimirov
You can also search for this author in PubMed Google Scholar
- E. Voevodina
You can also search for this author in PubMed Google Scholar
- F. Vogel
You can also search for this author in PubMed Google Scholar
- P. Vokac
You can also search for this author in PubMed Google Scholar
- J. Von Ahnen
You can also search for this author in PubMed Google Scholar
- E. Von Toerne
You can also search for this author in PubMed Google Scholar
- B. Vormwald
You can also search for this author in PubMed Google Scholar
- V. Vorobel
You can also search for this author in PubMed Google Scholar
- K. Vorobev
You can also search for this author in PubMed Google Scholar
- M. Vos
You can also search for this author in PubMed Google Scholar
- K. Voss
You can also search for this author in PubMed Google Scholar
- J. H. Vossebeld
You can also search for this author in PubMed Google Scholar
- M. Vozak
You can also search for this author in PubMed Google Scholar
- L. Vozdecky
You can also search for this author in PubMed Google Scholar
- N. Vranjes
You can also search for this author in PubMed Google Scholar
- M. Vranjes Milosavljevic
You can also search for this author in PubMed Google Scholar
- M. Vreeswijk
You can also search for this author in PubMed Google Scholar
- R. Vuillermet
You can also search for this author in PubMed Google Scholar
- O. Vujinovic
You can also search for this author in PubMed Google Scholar
- I. Vukotic
You can also search for this author in PubMed Google Scholar
- S. Wada
You can also search for this author in PubMed Google Scholar
- C. Wagner
You can also search for this author in PubMed Google Scholar
- W. Wagner
You can also search for this author in PubMed Google Scholar
- S. Wahdan
You can also search for this author in PubMed Google Scholar
- H. Wahlberg
You can also search for this author in PubMed Google Scholar
- R. Wakasa
You can also search for this author in PubMed Google Scholar
- M. Wakida
You can also search for this author in PubMed Google Scholar
- V. M. Walbrecht
You can also search for this author in PubMed Google Scholar
- J. Walder
You can also search for this author in PubMed Google Scholar
- R. Walker
You can also search for this author in PubMed Google Scholar
- W. Walkowiak
You can also search for this author in PubMed Google Scholar
- A. M. Wang
You can also search for this author in PubMed Google Scholar
- A. Z. Wang
You can also search for this author in PubMed Google Scholar
- C. Wang
You can also search for this author in PubMed Google Scholar
- C. Wang
You can also search for this author in PubMed Google Scholar
- H. Wang
You can also search for this author in PubMed Google Scholar
- J. Wang
You can also search for this author in PubMed Google Scholar
- R.-J. Wang
You can also search for this author in PubMed Google Scholar
- R. Wang
You can also search for this author in PubMed Google Scholar
- R. Wang
You can also search for this author in PubMed Google Scholar
- S. M. Wang
You can also search for this author in PubMed Google Scholar
- S. Wang
You can also search for this author in PubMed Google Scholar
- T. Wang
You can also search for this author in PubMed Google Scholar
- W. T. Wang
You can also search for this author in PubMed Google Scholar
- X. Wang
You can also search for this author in PubMed Google Scholar
- X. Wang
You can also search for this author in PubMed Google Scholar
- X. Wang
You can also search for this author in PubMed Google Scholar
- Y. Wang
You can also search for this author in PubMed Google Scholar
- Y. Wang
You can also search for this author in PubMed Google Scholar
- Z. Wang
You can also search for this author in PubMed Google Scholar
- Z. Wang
You can also search for this author in PubMed Google Scholar
- Z. Wang
You can also search for this author in PubMed Google Scholar
- A. Warburton
You can also search for this author in PubMed Google Scholar
- R. J. Ward
You can also search for this author in PubMed Google Scholar
- N. Warrack
You can also search for this author in PubMed Google Scholar
- A. T. Watson
You can also search for this author in PubMed Google Scholar
- H. Watson
You can also search for this author in PubMed Google Scholar
- M. F. Watson
You can also search for this author in PubMed Google Scholar
- G. Watts
You can also search for this author in PubMed Google Scholar
- B. M. Waugh
You can also search for this author in PubMed Google Scholar
- A. F. Webb
You can also search for this author in PubMed Google Scholar
- C. Weber
You can also search for this author in PubMed Google Scholar
- H. A. Weber
You can also search for this author in PubMed Google Scholar
- M. S. Weber
You can also search for this author in PubMed Google Scholar
- S. M. Weber
You can also search for this author in PubMed Google Scholar
- C. Wei
You can also search for this author in PubMed Google Scholar
- Y. Wei
You can also search for this author in PubMed Google Scholar
- A. R. Weidberg
You can also search for this author in PubMed Google Scholar
- J. Weingarten
You can also search for this author in PubMed Google Scholar
- M. Weirich
You can also search for this author in PubMed Google Scholar
- C. Weiser
You can also search for this author in PubMed Google Scholar
- C. J. Wells
You can also search for this author in PubMed Google Scholar
- T. Wenaus
You can also search for this author in PubMed Google Scholar
- B. Wendland
You can also search for this author in PubMed Google Scholar
- T. Wengler
You can also search for this author in PubMed Google Scholar
- N. S. Wenke
You can also search for this author in PubMed Google Scholar
- N. Wermes
You can also search for this author in PubMed Google Scholar
- M. Wessels
You can also search for this author in PubMed Google Scholar
- K. Whalen
You can also search for this author in PubMed Google Scholar
- A. M. Wharton
You can also search for this author in PubMed Google Scholar
- A. S. White
You can also search for this author in PubMed Google Scholar
- A. White
You can also search for this author in PubMed Google Scholar
- M. J. White
You can also search for this author in PubMed Google Scholar
- D. Whiteson
You can also search for this author in PubMed Google Scholar
- L. Wickremasinghe
You can also search for this author in PubMed Google Scholar
- W. Wiedenmann
You can also search for this author in PubMed Google Scholar
- C. Wiel
You can also search for this author in PubMed Google Scholar
- M. Wielers
You can also search for this author in PubMed Google Scholar
- C. Wiglesworth
You can also search for this author in PubMed Google Scholar
- L. A. M. Wiik-Fuchs
You can also search for this author in PubMed Google Scholar
- D. J. Wilbern
You can also search for this author in PubMed Google Scholar
- H. G. Wilkens
You can also search for this author in PubMed Google Scholar
- D. M. Williams
You can also search for this author in PubMed Google Scholar
- H. H. Williams
You can also search for this author in PubMed Google Scholar
- S. Williams
You can also search for this author in PubMed Google Scholar
- S. Willocq
You can also search for this author in PubMed Google Scholar
- P. J. Windischhofer
You can also search for this author in PubMed Google Scholar
- F. Winklmeier
You can also search for this author in PubMed Google Scholar
- B. T. Winter
You can also search for this author in PubMed Google Scholar
- J. K. Winter
You can also search for this author in PubMed Google Scholar
- M. Wittgen
You can also search for this author in PubMed Google Scholar
- M. Wobisch
You can also search for this author in PubMed Google Scholar
- R. Wölker
You can also search for this author in PubMed Google Scholar
- J. Wollrath
You can also search for this author in PubMed Google Scholar
- M. W. Wolter
You can also search for this author in PubMed Google Scholar
- H. Wolters
You can also search for this author in PubMed Google Scholar
- V. W. S. Wong
You can also search for this author in PubMed Google Scholar
- A. F. Wongel
You can also search for this author in PubMed Google Scholar
- S. D. Worm
You can also search for this author in PubMed Google Scholar
- B. K. Wosiek
You can also search for this author in PubMed Google Scholar
- K. W. Woźniak
You can also search for this author in PubMed Google Scholar
- K. Wraight
You can also search for this author in PubMed Google Scholar
- J. Wu
You can also search for this author in PubMed Google Scholar
- M. Wu
You can also search for this author in PubMed Google Scholar
- M. Wu
You can also search for this author in PubMed Google Scholar
- S. L. Wu
You can also search for this author in PubMed Google Scholar
- X. Wu
You can also search for this author in PubMed Google Scholar
- Y. Wu
You can also search for this author in PubMed Google Scholar
- Z. Wu
You can also search for this author in PubMed Google Scholar
- J. Wuerzinger
You can also search for this author in PubMed Google Scholar
- T. R. Wyatt
You can also search for this author in PubMed Google Scholar
- B. M. Wynne
You can also search for this author in PubMed Google Scholar
- S. Xella
You can also search for this author in PubMed Google Scholar
- L. Xia
You can also search for this author in PubMed Google Scholar
- M. Xia
You can also search for this author in PubMed Google Scholar
- J. Xiang
You can also search for this author in PubMed Google Scholar
- X. Xiao
You can also search for this author in PubMed Google Scholar
- M. Xie
You can also search for this author in PubMed Google Scholar
- X. Xie
You can also search for this author in PubMed Google Scholar
- S. Xin
You can also search for this author in PubMed Google Scholar
- J. Xiong
You can also search for this author in PubMed Google Scholar
- I. Xiotidis
You can also search for this author in PubMed Google Scholar
- D. Xu
You can also search for this author in PubMed Google Scholar
- H. Xu
You can also search for this author in PubMed Google Scholar
- H. Xu
You can also search for this author in PubMed Google Scholar
- L. Xu
You can also search for this author in PubMed Google Scholar
- R. Xu
You can also search for this author in PubMed Google Scholar
- T. Xu
You can also search for this author in PubMed Google Scholar
- W. Xu
You can also search for this author in PubMed Google Scholar
- Y. Xu
You can also search for this author in PubMed Google Scholar
- Z. Xu
You can also search for this author in PubMed Google Scholar
- Z. Xu
You can also search for this author in PubMed Google Scholar
- B. Yabsley
You can also search for this author in PubMed Google Scholar
- S. Yacoob
You can also search for this author in PubMed Google Scholar
- N. Yamaguchi
You can also search for this author in PubMed Google Scholar
- Y. Yamaguchi
You can also search for this author in PubMed Google Scholar
- H. Yamauchi
You can also search for this author in PubMed Google Scholar
- T. Yamazaki
You can also search for this author in PubMed Google Scholar
- Y. Yamazaki
You can also search for this author in PubMed Google Scholar
- J. Yan
You can also search for this author in PubMed Google Scholar
- S. Yan
You can also search for this author in PubMed Google Scholar
- Z. Yan
You can also search for this author in PubMed Google Scholar
- H. J. Yang
You can also search for this author in PubMed Google Scholar
- H. T. Yang
You can also search for this author in PubMed Google Scholar
- S. Yang
You can also search for this author in PubMed Google Scholar
- T. Yang
You can also search for this author in PubMed Google Scholar
- X. Yang
You can also search for this author in PubMed Google Scholar
- X. Yang
You can also search for this author in PubMed Google Scholar
- Y. Yang
You can also search for this author in PubMed Google Scholar
- Y. Yang
You can also search for this author in PubMed Google Scholar
- Z. Yang
You can also search for this author in PubMed Google Scholar
- W.-M. Yao
You can also search for this author in PubMed Google Scholar
- Y. C. Yap
You can also search for this author in PubMed Google Scholar
- H. Ye
You can also search for this author in PubMed Google Scholar
- H. Ye
You can also search for this author in PubMed Google Scholar
- J. Ye
You can also search for this author in PubMed Google Scholar
- S. Ye
You can also search for this author in PubMed Google Scholar
- X. Ye
You can also search for this author in PubMed Google Scholar
- Y. Yeh
You can also search for this author in PubMed Google Scholar
- I. Yeletskikh
You can also search for this author in PubMed Google Scholar
- B. K. Yeo
You can also search for this author in PubMed Google Scholar
- M. R. Yexley
You can also search for this author in PubMed Google Scholar
- P. Yin
You can also search for this author in PubMed Google Scholar
- K. Yorita
You can also search for this author in PubMed Google Scholar
- S. Younas
You can also search for this author in PubMed Google Scholar
- C. J. S. Young
You can also search for this author in PubMed Google Scholar
- C. Young
You can also search for this author in PubMed Google Scholar
- Y. Yu
You can also search for this author in PubMed Google Scholar
- M. Yuan
You can also search for this author in PubMed Google Scholar
- R. Yuan
You can also search for this author in PubMed Google Scholar
- L. Yue
You can also search for this author in PubMed Google Scholar
- X. Yue
You can also search for this author in PubMed Google Scholar
- M. Zaazoua
You can also search for this author in PubMed Google Scholar
- B. Zabinski
You can also search for this author in PubMed Google Scholar
- E. Zaid
You can also search for this author in PubMed Google Scholar
- T. Zakareishvili
You can also search for this author in PubMed Google Scholar
- N. Zakharchuk
You can also search for this author in PubMed Google Scholar
- S. Zambito
You can also search for this author in PubMed Google Scholar
- J. A. Zamora Saa
You can also search for this author in PubMed Google Scholar
- J. Zang
You can also search for this author in PubMed Google Scholar
- D. Zanzi
You can also search for this author in PubMed Google Scholar
- O. Zaplatilek
You can also search for this author in PubMed Google Scholar
- S. V. Zeißner
You can also search for this author in PubMed Google Scholar
- C. Zeitnitz
You can also search for this author in PubMed Google Scholar
- J. C. Zeng
You can also search for this author in PubMed Google Scholar
- D. T. Zenger Jr
You can also search for this author in PubMed Google Scholar
- O. Zenin
You can also search for this author in PubMed Google Scholar
- T. Ženiš
You can also search for this author in PubMed Google Scholar
- S. Zenz
You can also search for this author in PubMed Google Scholar
- S. Zerradi
You can also search for this author in PubMed Google Scholar
- D. Zerwas
You can also search for this author in PubMed Google Scholar
- M. Zhai
You can also search for this author in PubMed Google Scholar
- B. Zhang
You can also search for this author in PubMed Google Scholar
- D. F. Zhang
You can also search for this author in PubMed Google Scholar
- J. Zhang
You can also search for this author in PubMed Google Scholar
- J. Zhang
You can also search for this author in PubMed Google Scholar
- K. Zhang
You can also search for this author in PubMed Google Scholar
- L. Zhang
You can also search for this author in PubMed Google Scholar
- P. Zhang
You can also search for this author in PubMed Google Scholar
- R. Zhang
You can also search for this author in PubMed Google Scholar
- S. Zhang
You can also search for this author in PubMed Google Scholar
- T. Zhang
You can also search for this author in PubMed Google Scholar
- X. Zhang
You can also search for this author in PubMed Google Scholar
- X. Zhang
You can also search for this author in PubMed Google Scholar
- Y. Zhang
You can also search for this author in PubMed Google Scholar
- Z. Zhang
You can also search for this author in PubMed Google Scholar
- Z. Zhang
You can also search for this author in PubMed Google Scholar
- H. Zhao
You can also search for this author in PubMed Google Scholar
- P. Zhao
You can also search for this author in PubMed Google Scholar
- T. Zhao
You can also search for this author in PubMed Google Scholar
- Y. Zhao
You can also search for this author in PubMed Google Scholar
- Z. Zhao
You can also search for this author in PubMed Google Scholar
- A. Zhemchugov
You can also search for this author in PubMed Google Scholar
- X. Zheng
You can also search for this author in PubMed Google Scholar
- Z. Zheng
You can also search for this author in PubMed Google Scholar
- D. Zhong
You can also search for this author in PubMed Google Scholar
- B. Zhou
You can also search for this author in PubMed Google Scholar
- C. Zhou
You can also search for this author in PubMed Google Scholar
- H. Zhou
You can also search for this author in PubMed Google Scholar
- N. Zhou
You can also search for this author in PubMed Google Scholar
- Y. Zhou
You can also search for this author in PubMed Google Scholar
- C. G. Zhu
You can also search for this author in PubMed Google Scholar
- C. Zhu
You can also search for this author in PubMed Google Scholar
- H. L. Zhu
You can also search for this author in PubMed Google Scholar
- H. Zhu
You can also search for this author in PubMed Google Scholar
- J. Zhu
You can also search for this author in PubMed Google Scholar
- Y. Zhu
You can also search for this author in PubMed Google Scholar
- Y. Zhu
You can also search for this author in PubMed Google Scholar
- X. Zhuang
You can also search for this author in PubMed Google Scholar
- K. Zhukov
You can also search for this author in PubMed Google Scholar
- V. Zhulanov
You can also search for this author in PubMed Google Scholar
- N. I. Zimine
You can also search for this author in PubMed Google Scholar
- J. Zinsser
You can also search for this author in PubMed Google Scholar
- M. Ziolkowski
You can also search for this author in PubMed Google Scholar
- L. Živković
You can also search for this author in PubMed Google Scholar
- A. Zoccoli
You can also search for this author in PubMed Google Scholar
- K. Zoch
You can also search for this author in PubMed Google Scholar
- T. G. Zorbas
You can also search for this author in PubMed Google Scholar
- O. Zormpa
You can also search for this author in PubMed Google Scholar
- W. Zou
You can also search for this author in PubMed Google Scholar
- L. Zwalinski
You can also search for this author in PubMed Google Scholar
Consortia
ATLAS Collaboration
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Funded by SCOAP3. SCOAP3 supports the goals of the International Year of Basic Sciences for Sustainable Development.
About this article

Cite this article
Aad, G., Abbott, B., Abbott, D.C. et al. Calibration of the light-flavour jet mistagging efficiency of the b-tagging algorithms with Z+jets events using 139 \(\textrm{fb}^{-1}\) of ATLAS proton–proton collision data at \(\sqrt{s} = 13\) TeV. Eur. Phys. J. C 83, 728 (2023). https://doi.org/10.1140/epjc/s10052-023-11736-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-023-11736-z
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative