
Abstract
We consider the scattering of kinks of the sinh-deformed \(\varphi ^4\) model, which is obtained from the well-known \(\varphi ^4\) model by means of the deformation procedure. Depending on the initial velocity \(v_\mathrm {in}\) of the colliding kinks, different collision scenarios are realized. There is a critical value \(v_\mathrm {cr}\) of the initial velocity, which separates the regime of reflection (at \(v_\mathrm {in}>v_\mathrm {cr}\)) and that of a complicated interaction (at \(v_\mathrm {in}<v_\mathrm {cr}\)) with kinks’ capture and escape windows. Besides that, at \(v_\mathrm {in}\) below \(v_\mathrm {cr}\) we observe the formation of a bound state of two oscillons, as well as their escape at some values of \(v_\mathrm {in}\).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Topological defects arise in a diversity of contexts in high energy physics, cosmology, quantum and classical field theory, condensed matter, and so on. In high energy physics, they are topologically non-trivial solutions of the equations of motion and possess very interesting properties, which lead to new physical phenomena [1,2,3,4].
Nowadays, the study of the topological defects is a very fast developing area with significant effort being applied to the investigation of domain walls, vortices, strings, as well as embedded topological defects such as a Q-lump on a domain wall and a skyrmion on a domain wall, and so on [5,6,7,8,9,10,11,12,13,14,15,16,17]. It is also of interest to mention the so-called Q-balls and similar configurations [18,19,20,21,22,23], which are charged and protected against decaying into the elementary excitations supported by the respective model. Also, it is worth mentioning other possibilities, such as the study of solitons in fibers [24], bubble collisions in cosmology [25], and localized excitations in nonlinear systems [26].
Models in (1, 1) space-time dimensions are of special interest [2, 3, 27, 28], since the dynamics of some two- or three-dimensional systems can be reduced to the one-dimensional models. For example, a planar domain wall, which separates regions with different minima of the potential, in the direction perpendicular to it can be interpreted as a one-dimensional topological configuration (a kink). On the other hand, the (1, 1)-dimensional field-theoretical models can be a first step towards more complicated higher-dimensional models. Moreover, even in the (1, 1)-dimensional case, topological defects may arise in more complex models with two or more fields, see, e.g., Refs. [29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59]. In this more general context, several works have developed analytical solutions, which, in turn, has allowed one to study their stability and to use them in application of interest in physics [29,30,31,32,33,34,35,36,37,38,39,40]. Other investigations have dealt with the presence of junctions and/or intersections of defects [41,42,43,44], and with issues related to composite-kink internal structures, twinlike models with several fields and scalar triplet on domain walls [45,46,47,48,49,50,51,52,53,54,55,56,57], among other issues.
In the case of models described by real scalar fields with standard kinematics, in the (1, 1) space-time the presence of interactions that develop spontaneous symmetry breaking in general leads to localized topological structures having the kinklike profile. The interactions of these one-dimensional topological structures with each other and with spatial inhomogeneities (impurities) have attracted the attention of physicists and mathematicians for a long time; see, e.g., Ref. [27, 28]. The first studies on this subject date back to the 1970s and 1980s [60,61,62]. Nevertheless, forty years later we see that it is still an actively developing area with many new applications. Many important results have been obtained by means of the numerical simulation, which is one of the most powerful tools for studying the subject. In particular, resonance phenomena – escape windows and quasi-resonances – were found in the kink-antikink scattering process. A broad class of (1, 1)-dimensional models with polynomial potentials such as the \(\varphi ^4\), \(\varphi ^6\), \(\varphi ^8\) models, and those with higher degree polynomial self-interaction has been considered [62,63,64,65,66,67,68,69,70,71,72,73,74,75,76]. One should also mention the new results on the long-range interaction between kinks [74,75,76,77,78,79]. Other models with non-polynomial potentials are also being discussed in the literature. For example, the modified sine-Gordon [80], the double sine-Gordon [81,82,83], and a variety of models which can be obtained using the deformation procedure, which we explain below.
Apart from the numerical solving of the equation of motion, other methods are widely used for investigating the kink-antikink interactions. One of them is the collective coordinate method [64, 84,85,86,87,88,89,90,91]. Within this approximation a real field-theoretical system (which formally has an infinite number of degrees of freedom) is approximately described as a system with one or a few degrees of freedom. For example, in the case of the kink-antikink configuration one can use the distance between the kink and the antikink as the only degree of freedom (collective coordinate). In more complicated modifications of this approach other degrees of freedom (for instance, vibrational ones) can be involved, see, e.g., [84,85,86]. Another approximation, which allows to estimate the force between kink and antikink, is the Manton’s method [3, Ch. 5], [92,93,94,95]. This method is based on using the kinks’ asymptotics in situations where the distance between the kinks is large. However, one should mention that the applicability of this method for kinks and solitons with power-law asymptotics is not obvious.
An impressive progress has been achieved in the analytical treatment of the (1, 1)-dimensional field-theoretical models. Among several possibilities to deal with the problem analytically, the trial orbit method was suggested in [29] as a way to solve the equations of motion in systems described by two real scalar fields that interact nonlinearly. This method has been used by others, and in [48] it was shown to be very effective when the equations of motion can be reduced to first-order differential equations. Also, in [49] the authors have used the integrating factor to solve the equations of motion in the case of a very specific potential.
Another possibility of searching for models that support analytical solutions appeared before in [96] and also in Refs. [73, 97, 98]. It refers to the deformation procedure, a method of current interest which helps us to introduce new models, and solve them analytically. This will be further reviewed below, and used to define the model [99] we want to investigate in the current work. In particular, the new model is somehow similar to the \(\varphi ^4\) model with spontaneous symmetry breaking, so we will compare its features with the \(\varphi ^4\) case, in order to highlight the differences between the two cases, and to see how the non-polynomial interaction of the new model modifies the behavior seen in the standard \(\varphi ^4\) model.
In this work we focus our attention on the kink-antikink scattering process and organize the investigation as follows. In Sect. 2 we give general introduction to the (1, 1)-dimensional field-theoretical models, which possess topological solutions with the kink profile. In Sect. 3 we review the \(\varphi ^4\) model, briefly accounting for the kink-antikink scattering within this model. Furthermore, in Sect. 4 we apply the deformation procedure to the \(\varphi ^4\) model in order to introduce a model with non-polynomial potential, which we call the sinh-deformed \(\varphi ^4\) model. In Sect. 5 we focus on the collisions of the kink and the antikink of the sinh-deformed \(\varphi ^4\) model. In this section we present our main results and compare them with the results of the \(\varphi ^4\) model. Finally, in Sect. 6 we conclude with a discussion of the results and the prospects for future works.
2 Topological solitons in (1,1)-dimensional models
Consider a field-theoretical model in the (1, 1)-dimensional space-time with its dynamics defined by the Lagrangian
where \(\varphi (x,t)\) is a real scalar field. The potential \(U(\varphi )\) is supposed to be non-negative function with two or more degenerate minima, \(\varphi _1^{(0)}\), \(\varphi _2^{(0)}\), ..., such that \(U(\varphi _1^{(0)})=U(\varphi _2^{(0)})=\cdots =0\). The Lagrangian (2.1) leads to the following equation of motion for the field \(\varphi \)
The energy functional corresponding to the Lagrangian (2.1) is
In the static case \(\displaystyle \frac{\partial \varphi }{\partial t}=0\), and from Eq. (2.2) we have
This equation can be easily transformed into the first order differential equations
For the energy of the static configuration to be finite, the two following conditions must hold
where \(\varphi ^{(0)}_i\) and \(\varphi ^{(0)}_j\) are two adjacent minima of the potential. These expressions (2.6) are necessary conditions for the energy of a static configuration to be finite. If (2.6) hold, then the second and the third terms in the integrand in (2.3) fall off at \(x\rightarrow \pm \infty \), hence the integral (2.3) can be convergent. Configurations with \(\varphi _i^{(0)}\ne \varphi _j^{(0)}\) are called topological and have a kinklike shape. In this sense, a conserved topological current can be introduced, and for the models to be investigated below one can use
The corresponding topological charge is
This charge is determined only by the asymptotics (2.6), so it does not depend on the behavior of the field \(\varphi (x)\) at finite x.
For every non-negative potential \(U(\varphi )\) we can introduce a smooth function \(W(\varphi )\), called the superpotential, as
Using the superpotential we can rewrite the energy of a static configuration \(\varphi (x)\) in the following manner
where
From Eq. (2.10) one can see that the energy of any static configuration belonging to a given topological sector is bounded from below by \(E_\mathrm {BPS}^{}\). The configurations with the minimal energy (2.11) are called BPS configurations, or BPS saturated configurations [100,101,102]. From Eq. (2.10) it is easy to see that any BPS configuration satisfies the first order differential equations
which coincide with (2.5).
Below we deal with kinks and antikinks – the BPS saturated topological solutions of Eq. (2.5), which interpolate between neighboring minima of the potential. The solution with the asymptitics \(\varphi (+\infty )>\varphi (-\infty )\) is called kink, while the term antikink stands for the solution with \(\varphi (+\infty )<\varphi (-\infty )\). Sometimes we use the term kink for both kink and antikink, for brevity.

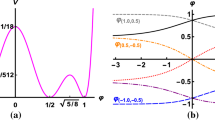
Potentials and kinks of the \(\varphi ^4\) model (dashed curves) and of the sinh-deformed \(\varphi ^4\) model (solid curves)

Bounce off and escape of kinks of the \(\varphi ^4\) model at \(v_\mathrm {in}=0.4000\). Left panel – the space-time picture of the field evolution. Right panel – the time dependence of the field at the origin

The formation of a bound state in the \(\varphi ^4\) kink-antikink collision at \(v_\mathrm {in}^{}=0.2541\). Left panel – the space-time picture of a bion formation. Right panel – the time dependence of the field at the origin

Examples of two-, three-, and four-bounce windows in the collisions of the \(\varphi ^4\) kinks. Left panel – the space-time picture of the escape windows. Right panel – the time dependence of the field at the origin
Many phenomena observed in the kink-antikink scattering can be explained by the presence of the vibrational mode(s) in the kink’s excitation spectrum. In order to find the spectrum of localized excitations of a kink, we have to add a small perturbation \(\delta \varphi (x,t)\) to the static kink solution \(\varphi _\mathrm {k}^{}(x)\),
The substitution of \(\varphi (x,t)\) into the equation of motion (2.2) leads to the partial differential equation for the perturbation \(\delta \varphi (x,t)\); after linearization one gets
Since the second derivative of the potential calculated at the static solution \(\varphi _\mathrm {k}^{}(x)\) depends only on x, we can assume that \(\delta \varphi \) has the form
and this allows us to obtain the eigenvalue problem of the type of the stationary Schrödinger equation,
where the operator \(\hat{H}\) (the Hamiltonian) is
with the potential
For each state of the discrete spectrum, the corresponding eigenfunction \(\eta (x)\) is a twice continuously differentiable and square-integrable on the x-axis. Kink and antikink have the same excitation spectrum.

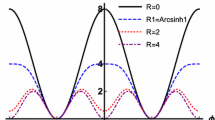
The quantum-mechanical potential (4.6)

Bounce off and escape of kinks of the sinh-deformed \(\varphi ^4\) model at \(v_\mathrm {in}=0.5000\). Left panel – the space-time picture of the field evolution. Right panel – the time dependence of the field at the origin

The formation of a bound state in the sinh-deformed \(\varphi ^4\) kink-antikink collision at \(v_\mathrm {in}^{}=0.4000\). Left panel – the space-time picture of a bion formation. Right panel – the time dependence of the field at the origin

Examples of two- and three-bounce windows in the collisions of kinks of the sinh-deformed \(\varphi ^4\) model. Left panel – the space-time picture of the escape windows. Right panel – the time dependence of the field at the origin
The discrete spectrum in the potential (2.18) always possesses a zero (or translational) mode \(\omega _0^{}=0\). It can easily be shown by differentiating Eq. (2.4) with respect to x, and taking into account that \(\varphi _\mathrm {k}^{}(x)\) is a solution of Eq. (2.4), i.e.
So we see that \(\displaystyle \frac{d\varphi _\mathrm {k}^{}}{dx}\) is an eigenfunction of the Hamiltonian (2.17) associated with the eigenvalue \(\omega _0^{}=0\). The presence of a zero mode in the kink’s excitation spectrum is a consequence of the translational invariance of the Lagrangian.
Furthermore, the presence of W in Eq. (2.9) allows to write the operator \(\hat{H}\) in the form
where \(A^\dag \) and A are the first order differential operators
This factorization shows that the operator \(\hat{H}\) is non-negative, so the static solution \(\varphi _{\mathrm {k}}(x)\) is linearly stable.
3 The \(\varphi ^4\) model
In this section we recall some facts about kinks of the \(\varphi ^4\) model. We use for simplicity dimensionless fields and space-time coordinates and write the potential of the \(\varphi ^4\) model in the form
This potential possesses two degenerate minima \(\varphi _1^{(0)}=-1\) and \(\varphi _2^{(0)}=1\), see Fig. 1a.
The Eq. (2.5) with the potential (3.1) can be easily integrated, which yields the static topologically non-trivial solutions, the kink and the antikink:
These kinks interpolate between the two minima of the potential, as shown in Fig. 1b. The mass of the kink (antikink), i.e. the energy \(E[\varphi _\mathrm {k}^{}(x)]\) of the static kink (antikink), is
The moving kink (antikink) can be obtained from Eq. (3.2) by the Lorentz boost.
The quantum-mechanical potential (2.18), which defines the spectrum of the localized excitations of the \(\varphi ^4\) kink, has the form
It is the well-known modified Pöschl-Teller potential [103]. Apart from the zero mode \(\omega _0^{}=0\), there is a vibrational mode with the frequency \(\omega _1^{}=\sqrt{3}\). As we explain below, the presence of the vibrational mode leads to resonance phenomena in the kink-antikink collisions.
As we informed in the Introduction, the scattering of the \(\varphi ^4\) kinks is well-studied, so let us now briefly review the main features of the collision processes in this case.
Consider the initial configuration in the form of kink and antikink centered at the points \(x=-x_0^{}\) and \(x=x_0^{}\), respectively, and moving towards each other with the initial velocities \(v_\mathrm {in}^{}\) in the laboratory frame, i.e.
To find evolution of this initial configuration, we solved the equation of motion (2.2) with the potential (3.1) numerically using the standard explicit finite difference scheme,
where (i, j) number the x and t coordinates of the grid points, \((x_i,t_j)\), on a grid with the steps \(\delta t=0.008\) and \(\delta x=0.01\). We repeated selected computations with smaller steps, \(\delta t=0.004\) and \(\delta x=0.005\), in order to check our numerical results. We also checked the total energy conservation. In all simulations of the \(\varphi ^4\) kinks collisions we used the initial half-distance \(x_0^{}=5\).
Depending on the initial velocity, the kinks scattering looks differently. There is a critical value of the initial velocity \(v_\mathrm {cr}^{}\approx 0.2598\). At \(v_\mathrm {in}^{}>v_\mathrm {cr}^{}\) we observe kinks escape after a collision, see Fig. 2. Some part of the energy is being emitted in the form of small waves.

Top panel – a two-bounce escape window and some of the nearby three-bounce windows. Bottom panel – a three-bounce window (which is boxed on the top panel) with some nearby four-bounce windows

Formation of a bound state of two oscillons in the collisions of kinks of the sinh-deformed \(\varphi ^4\) model. Left panel – the space-time picture. Right panel – the time dependence of the field at the origin

Escape of two oscillons for several values of the initial velocity of the colliding kinks \(v_\mathrm {in}^{}\), here \(v_\mathrm {os}^{}\) stands for the final velocity of the escaping oscillon
At \(v_\mathrm {in}^{}<v_\mathrm {cr}^{}\) the kinks collide and form a long-living bound state, a bion, which is illustrated in Fig. 3. This bion decays slowly, emitting its energy in the form of waves of small amplitude. However the kinks capture appears not for all \(v_\mathrm {in}^{}<v_\mathrm {cr}^{}\), since there is a pattern of escape windows in the collision processes. An escape window refers to a narrow interval of initial velocities, within which kinks do not form a bound state but escape to infinities. It is important point that, unlike bouncing off at \(v_\mathrm {in}^{}>v_\mathrm {cr}^{}\), within an escape window the kinks escape to infinities after two, three or more collisions. According to the number of collisions before escaping, there are two-bounce windows, three-bounce windows, and so on. See Fig. 4 for some illustrations of two-, three- and four-bounce windows. The escape windows form a fractal structure. Two-bounce windows are the broadest, and near each of them there is a series of three-bounce windows. Near each three-bounce window, in turn, there is a series of four-bounce windows, and so on, see, e.g., [27, 28].
The explanation of the appearance of the escape windows is that they are related to the resonance energy exchange between the kinetic energy (the translational mode) and the vibrational mode of the kink (antikink). The mechanism works as follows: consider, for example, the two-bounce window illustrated in Fig. 4a. At the first collision, some part of the kinks kinetic energy is transferred into their vibrational modes. As a result of the loss of the kinetic energy, the kink and the antikink are not able to overcome mutual attraction, and they return and collide again. However, if a certain resonance relation between the time \(T_{12}^{}\) between the first and the second collisions and the frequency \(\omega _1^{}\) of the vibrational mode holds, a part of the energy can be returned into the kinetic energy, and the kinks are then able to escape from each other.
4 Deformation procedure and the sinh-deformed \(\varphi ^4\) model
The sinh-deformed \(\varphi ^4\) model can be obtained from the \(\varphi ^4\) model by applying the deformation procedure used in Refs. [73, 96,97,98, 104]. The potential \(U_2^{}(\varphi )\) of the new model is related with the old model potential \(U_1^{}(\varphi )\) by a deforming function \(f(\varphi )\),
where “\(\varphi \rightarrow f(\varphi )\)” means that one must substitute the field \(\varphi \) by \(f(\varphi )\). At the same time, the kink of the new model, \(\varphi _\mathrm {k}^{\mathrm {(new)}}(x)\), can be easily obtained from the kink of the old model, \(\varphi _\mathrm {k}^{\mathrm {(old)}}(x)\), by the inverse deforming function \(f^{-1}\),
We start from the \(\varphi ^4\) model with the potential (3.1) and use the deforming function \(f(\varphi )=\sinh \varphi \). Then we come to the potential of the sinh-deformed \(\varphi ^4\) model
This potential has two degenerate minima, \(\varphi _\pm ^{}=\pm \text{ arsinh }\,1\), \(V(\varphi _\pm ^{})=0\), see Fig. 1a. The kinks of the sinh-deformed \(\varphi ^4\) model are
see Fig. 1b. The mass of the sinh-deformed \(\varphi ^4\) kink (antikink), i.e. the energy \(E[\varphi _\mathrm {k}^{}(x)]\) of the static kink (antikink), is
The excitation spectrum of the kink (antikink) (4.4) is defined by the quantum-mechanical potential
which is presented in Fig. 5. We performed a numerical search of the discrete part of the excitation spectrum in the potential (4.6). This problem was solved using the standard shooting method. For various values of \(\omega ^2\) we integrated Eq. (2.16) with the known asymptotic behavior \(\eta (x)\sim \exp (-\sqrt{4-\omega ^2}|x|)\) of its solutions at \(x\rightarrow \pm \infty \), starting from a large negative x and from a large positive x. As a result, we obtained two different solutions, the “left” solution and the “right” solution, which were then matched at some point \(\bar{x}\) close to the origin (the particular choice of \(\bar{x}\) is not important). The Wronskian of the “left” and the “right” solutions, calculated at the matching point, as a function of \(\omega ^2\) turns to zero at eigenvalues of the Hamiltonian (2.17) with the potential (4.6).
We found two levels in the potential (4.6): the zero mode \(\omega _0^{}=0\), and the vibrational mode with the frequency \(\omega _1^{}\approx 1.89\).
5 Kink-antikink collisions in the sinh-deformed \(\varphi ^4\) model
We studied the collisions of the kink and the antikink of the sinh-deformed \(\varphi ^4\) model using the initial configuration similar to that used in Sect. 3 in the case of the \(\varphi ^4\) kinks scattering, namely
which corresponds to the kink and the antikink centered at \(x=\pm \, x_0^{}\) and moving towards each other with the initial velocities \(v_\mathrm {in}^{}\). We used \(2x_0^{}=10\) and the same parameters of the numerical scheme as for the \(\varphi ^4\) kinks in Sect. 3, see Eq. (3.6) and the paragraph below this equation.
We found a critical value of the initial velocity \(v_\mathrm {cr}^{}\approx 0.4639\), which separates two different regimes of the kinks scattering. At \(v_\mathrm {in}^{}>v_\mathrm {cr}^{}\) the kinks bounce off and escape to infinities after one collision. This is illustrated in Fig. 6, and the situation here is similar to that observed for the \(\varphi ^4\) kinks above the critical velocity, as depicted in Fig. 2.
At the initial velocities below the critical value, \(v_\mathrm {in}^{}<v_\mathrm {cr}^{}\), we observed the kinks’ capture and formation of their bound state, Fig. 7, and a rich variety of resonance phenomena. First of all, in this range of the initial velocities we found a complicated pattern of escape windows, similar to the case of the \(\varphi ^4\) kinks. We identified many two-bounce, three-bounce, etc., escape windows. The field dynamics within these windows is similar to the case of the \(\varphi ^4\) model. In Fig. 8 we present examples of the field behavior within two- and three-bounce windows. In a way similar to the case of the \(\varphi ^4\) model, the escape windows that appear in the sinh-deformed model seem to form a fractal structure. We found several three-bounce escape windows near a two-bounce window, see Fig. 9. Near one of the three-bounce escape windows we observed four-bounce escape windows. This behavior is similar to the one found in the \(\varphi ^4\) model, so it suggests that the escape windows also form a fractal structure in this case.

The period of the oscillons’ oscillations about each other as a function of the initial velocity of the colliding kinks. The blue-shaded areas denote the escape windows for oscillons. The green-shaded area denotes the two-bounce escape window for kinks, while the pink-shaded areas denote the four-bounce escape windows for kinks
At the same time, the bion formation in the range \(v_\mathrm {in}^{}<v_\mathrm {cr}^{}\) outside the escape windows looks differently. In our numerical experiments we observed new phenomena, which are not typical for the \(\varphi ^4\) kinks. In many cases the final configuration looked like a bound state of two oscillons. These oscillons oscillate around each other near the origin and, as a consequence, the dependence on time of the field at the origin has a low-frequency envelope, as it is shown in Fig. 10. One notes that the amplitude and frequency of oscillations of these structures depend on the initial velocity of the colliding kinks. Moreover, at some values of the initial velocity we observed escape of the two oscillons with the final velocity \(v_\mathrm {os}^{}\), which varies in a wide range, as one can see from Fig. 11. The situation can be interpreted as follows: at some initial velocities of the colliding kinks the bion is formed, which evolves rather fast into a bound state of two oscillons, which can either oscillate around each other, or escape to infinities. The intervals of the initial velocity of the colliding kinks, at which the oscillons escape, form oscillons’ escape windows. The frequency of the field oscillations is the same for all oscillons, \(\omega _\mathrm {os}^{}\approx 1.88\), which is very close to \(\omega _1^{}=1.89\).
In Fig. 12 we show the dependence of the period of oscillations on the initial velocity of the colliding kinks. The shaded areas denote the escape windows for oscillons, i.e. the intervals of the initial velocity, at which the two oscillons escape to infinities. The widths of the escape windows are 0.00030, 0.00013, 0.00011, 0.00002, and \(\sim 0.00001\) for the 1st, 2nd, 3rd, 4th, and 5th windows, respectively.
The high frequency in Fig. 10 (right panels) is close to the frequency of the vibrational mode \(\omega _1\approx 1.89\) of the sinh-deformed \(\varphi ^4\) kink. For example, at the initial velocity \(v_\mathrm {in}^{}=0.44183\) the frequency is 1.86, at \(v_\mathrm {in}^{}=0.44188\) it is 1.84, and at \(v_\mathrm {in}^{}=0.44190\) it equals 1.83.
6 Comments and conclusion
In this work, we investigated the scattering of kinks of the sinh-deformed \(\varphi ^4\) model, obtained from the \(\varphi ^4\) model by the deformation procedure, and compared it with the same process in the \(\varphi ^4\) model. We showed that the two models engender similar behavior in several aspects: they support similar kinklike configurations, and their stability potentials present almost the same profile, which gives rise to the zero mode and the vibrational state with the frequency \(\omega _1=\sqrt{3}\approx 1.73\) in the case of the \(\varphi ^4\) model, and \(\omega _1^{}\approx 1.89\) for the sinh-deformed \(\varphi ^4\) model.
Moreover, in the scattering of kinks, the two models also admit a critical velocity \(v_\mathrm {cr}^{}\), which separates two different regimes of the collisions. On the one hand, at \(v_\mathrm {in}^{}<v_\mathrm {cr}^{}\) we observed the capture of kinks and the formation of bound states and, on the other hand, for \(v_\mathrm {in}^{}>v_\mathrm {cr}^{}\) the kinks escape to infinity after one collision. The value of the critical velocity is \(v_\mathrm {cr}^{}=0.4639\) for the sinh-deformed \(\varphi ^4\) model and for the \(\varphi ^4\) model it is equal to 0.2598.
In the study of collisions of kinks in the sinh-deformed \(\varphi ^4\) model, we observed that for velocities in the range \(v_\mathrm {in}^{}<v_\mathrm {cr}^{}\), there appeared several escape windows, which are also specific for the \(\varphi ^4\) and some other models. In particular, we have found two-bounce, three-bounce, and four-bounce escape windows; recall that within an n-bounce window the kinks escape to infinities after n collisions. The emergence of the escape windows is related to the resonant energy exchange between the translational and the vibrational modes of the kink and the antikink.
The general results of the kink collisions in the sinh-deformed model suggest that the model is not integrable, and that its kinklike configuration is not a soliton. Interestingly, at this point one can make a connection with the sine-Gordon model, which is an integrable model [105]. This model can also be obtained from the \(\varphi ^4\) model with the same deformation procedure: using the deformation function \(f(\varphi )=\sin \varphi \), the potential \(U_1(\varphi )\) in Eq. (3.1) transforms into
This is the potential of the sine-Gordon model, and its soliton solution can be written in the form
As is well-known, the corresponding stability potential supports the zero mode and no other bound state, and this helps one to understand its integrability. The sine-Gordon potential is periodic, in contrast to the \(\varphi ^4\) model described by a polynomial potential. In this sense, the sinh-deformed model which we have studied in this work seems to be farther away from the sine-Gordon and integrability, and hence it should present information that is absent in the \(\varphi ^4\) model.
With this motivation in mind, we then looked deeper into the escape windows in the sinh-deformed model and observed a new phenomenon, the conversion of the kink-antikink pair into a complex oscillating structure at the collision point at the origin. This structure can be interpreted as a bound state of two individual oscillons. It is interesting that at some initial velocities of the colliding kinks we observed the escape of these two oscillons.
The interval of initial velocities of the kinks, in which the kinks collide and form a bound state of two oscillons, which then escape, can be called an oscillons’ escape window. In our simulations the final velocity of the escaping oscillons varies in a wide range from zero to \(\sim 0.2\). Near the oscillons’ escape window the period of the oscillons’ oscillations in their bound state increases, see Fig. 12.
As shown in the recent work [104], we can introduce other models using the deformation function of the hyperbolic type. In particular, we can start with the \(\varphi ^6\) model studied before in [63], which supports no vibrational state. For instance, we can use the potential
and the deformation function \(f(\varphi )=\sinh \varphi \) to get to a new model
We note that for \(\varphi \) very small, the above model (6.4) leads us back to the model in (6.3). We call this model (6.4) the sinh-deformed \(\varphi ^6\) model. It would be interesting to study the scattering of kinks in this model, to see how it can be connected to the investigation [63,64,65,66], which revealed a resonant scattering structure that provided a counterexample to the belief that the existence of the vibrational bound state is a necessary condition for the appearance of multibounce resonances. Another issue is the study of the force between two kinks, to see if it can be connected with the scattering of kinks.
We can also consider models with modified kinematics, as the ones recently investigated in [106], where one considers the Dirac-Born-Infeld case. This modification changes the standard scenario and may contribute to add new possibilities to the escape windows that appear in the standard situation. Another route concerns models described by two real scalar fields, as the one investigated in Refs. [33, 45]. In this case, the presence of the two fields leads to analytical kinklike solutions whose internal structure can be used to model Bloch walls. The scenario here is richer, and the study of the kinks scattering in this model would allow one to see how the internal structure contributes to the presence of the escape windows, etc. These and other similar issues are currently under consideration, and we hope to report on them in the near future.
References
R. Rajaraman, Solitons and Instantons: An Introduction to Solitons and Instantons in Quantum Field Theory (North-Holland, Amsterdam, 1982)
A. Vilenkin, E.P.S. Shellard, Cosmic Strings and Other Topological Defects (Cambridge University Press, Cambridge, 2000)
N. Manton, P. Sutcliffe, Topological Solitons (Cambridge University Press, Cambridge, 2004)
T. Vachaspati, Kinks and Domain Walls: An Introduction to Classical and Quantum Solitons (Cambridge University Press, Cambrifge, 2006)
M. Nitta, Matryoshka Skyrmions. Nucl. Phys. B 872, 62 (2013). arXiv:1211.4916
M. Kobayashi, M. Nitta, Sine-Gordon kinks on a domain wall ring. Phys. Rev. D 87, 085003 (2013). arXiv:1302.0989
P. Jennings, P. Sutcliffe, The dynamics of domain wall Skyrmions. J. Phys. A 46, 465401 (2013). arXiv:1305.2869
S.B. Gudnason, M. Nitta, Domain wall Skyrmions. Phys. Rev. D 89, 085022 (2014). arXiv:1403.1245
N. Blyankinshtein, Q-lumps on a domain wall with a spin-orbit interaction. Phys. Rev. D 93, 065030 (2016). arXiv:1510.07935
A.Y. Loginov, Q kink of the nonlinear O(3) \(\sigma \) model involving an explicitly broken symmetry. Phys. Atom. Nucl. 74, 740 (2011)
A.Y. Loginov, Q kink of the nonlinear O(3) \(\sigma \) model involving an explicitly broken symmetry. Yad. Fiz. 74, 766 (2011)
V.A. Gani, V.G. Ksenzov, A.E. Kudryavtsev, Example of a self-consistent solution for a fermion on domain wall. Phys. Atom. Nucl. 73, 1889 (2010). arXiv:1001.3305
V.A. Gani, V.G. Ksenzov, A.E. Kudryavtsev, Example of a self-consistent solution for a fermion on domain wall. Yad. Fiz. 73, 1940 (2010). arXiv:1001.3305
V.A. Gani, V.G. Ksenzov, A.E. Kudryavtsev, Stable branches of a solution for a fermion on domain wall. Phys. Atom. Nucl. 74, 771 (2011). arXiv:1009.4370
V.A. Gani, V.G. Ksenzov, A.E. Kudryavtsev, Stable branches of a solution for a fermion on domain wall. Yad. Fiz. 74, 797 (2011). arXiv:1009.4370
D. Bazeia, A. Mohammadi, Fermionic bound states in distinct kinklike backgrounds. Eur. Phys. J. C 77, 203 (2017). arXiv:1702.00891
D. Bazeia, A. Mohammadi, D.C. Moreira, Fermion bound states in geometrically deformed backgrounds. arXiv:1706.04406
M. Cantara, M. Mai, P. Schweitzer, The energy-momentum tensor and D-term of Q-clouds. Nucl. Phys. A 953, 1 (2016). arXiv:1510.08015
I.E. Gulamov, E.Ya. Nugaev, M.N. Smolyakov, Analytic Q-ball solutions and their stability in a piecewise parabolic potential. Phys. Rev. D 87, 085043 (2013). arXiv:1303.1173
D. Bazeia, M.A. Marques, R. Menezes, Exact solutions, energy and charge of stable Q-balls. Eur. Phys. J. C 76, 241 (2016). arXiv:1512.04279
D. Bazeia, L. Losano, M.A. Marques, R. Menezes, R. da Rocha, Compact Q-balls. Phys. Lett. B 758, 146 (2016). arXiv:1604.08871
D. Bazeia, L. Losano, M.A. Marques, R. Menezes, Split Q-balls. Phys. Lett. B 765, 359 (2017). arXiv:1612.04442
V. Dzhunushaliev, A. Makhmudov, K.G. Zloshchastiev, Singularity-free model of electrically charged fermionic particles and gauged Q-balls. Phys. Rev. D 94, 096012 (2016). arXiv:1611.02105
Y.S. Kivshar, G. Agrawal, Optical Solitons: From Fibers to Photonic Crystals (Academic Press, New York, 2003)
A. Aguirre, M.C. Johnson, A status report on the observability of cosmic bubble collisions. Rep. Prog. Phys. 74, 074901 (2011). arXiv:0908.4105
B. Malomed (ed.), Spontaneous Symmetry Breaking, Self-Trapping, and Josephson Oscillations (Springer, New York, 2016)
T.I. Belova, A.E. Kudryavtsev, Solitons and their interactions in classical field theory. Phys. Usp. 40, 359 (1997)
T.I. Belova, A.E. Kudryavtsev, Solitons and their interactions in classical field theory. Usp. Fiz. Nauk 167, 377 (1997)
R. Rajaraman, Solitons of coupled scalar field theories in two-dimensions. Phys. Rev. Lett. 42, 200 (1979)
H.M. Ruck, Solitons in cyclic symmetric field theories. Nucl. Phys. B 167, 320 (1980)
R. MacKenzie, Topological structures on domain walls. Nucl. Phys. B 303, 149 (1988)
E.R.C. Abraham, P.K. Townsend, Intersecting extended objects in supersymmetric field theories. Nucl. Phys. B 351, 313 (1991)
D. Bazeia, M.J. dos Santos, R.F. Ribeiro, Solitons in systems of coupled scalar fields. Phys. Lett. A 208, 84 (1995). arXiv:hep-th/0311265
J.R. Morris, Superconducting domain walls from a supersymmetric action. Phys. Rev. D 52, 1096 (1995)
D. Bazeia, M.M. Santos, Classical stability of solitons in systems of coupled scalar fields. Phys. Lett. A 217, 28 (1996)
D. Bazeia, R.F. Ribeiro, M.M. Santos, Solitons in a class of systems of two coupled real scalar fields. Phys. Rev. E 54, 2943 (1996)
B. Chibisov, M. Shifman, BPS saturated walls in supersymmetric theories. Phys. Rev. D. 56, 7990 (1997) (Erratum: Phys. Rev. D 58, 109901 (1998)). arXiv:hep-th/9706141
J.R. Morris, Nested domain defects. Int. J. Mod. Phys. A 13, 1115 (1998). arXiv:hep-ph/9707519
J.D. Edelstein, M.L. Trobo, F.A. Brito, D. Bazeia, Kinks inside supersymmetric domain ribbons. Phys. Rev. D 57, 7561 (1998). arXiv:hep-th/9707016
D. Bazeia, H. Boschi-Filho, F.A. Brito, Domain defects in systems of two real scalar fields. JHEP 04, 028 (1999). arXiv:hep-th/9811084
G.W. Gibbons, P.K. Townsend, A Bogomolny equation for intersecting domain walls. Phys. Rev. Lett. 83, 1727 (1999). arXiv:hep-th/9905196
H. Oda, K. Ito, M. Naganuma, N. Sakai, An Exact solution of BPS domain wall junction. Phys. Lett. B 471, 140 (1999). arXiv:hep-th/9910095
S.M. Carroll, S. Hellerman, M. Trodden, Domain wall junctions are 1/4 - BPS states. Phys. Rev. D 61, 065001 (2000). arXiv:hep-th/9905217
D. Bazeia, F.A. Brito, Tiling the plane without supersymmetry. Phys. Rev. Lett. 84, 1094 (2000). arXiv:hep-th/9908090
D. Bazeia, F.A. Brito, Entrapment of a network of domain walls. Phys. Rev. D 62, 101701 (2000). arXiv:hep-th/0005045
V.A. Lensky, V.A. Gani, A.E. Kudryavtsev, Domain walls carrying a U(1) charge. Sov. Phys. JETP 93, 677 (2001). arXiv:hep-th/0104266
V.A. Lensky, V.A. Gani, A.E. Kudryavtsev, Domain walls carrying a U(1) charge. Zh. Eksp. Teor. Fiz. 120, 778 (2001). arXiv:hep-th/0104266
D. Bazeia, W. Freire, L. Losano, R.F. Ribeiro, Topological defects and the trial orbit method. Mod. Phys. Lett. A 17, 1945 (2002). arXiv:hep-th/0205305
A Alonso Izquierdo, MA Gonzalez Leon, J Mateos Guilarte, The Kink variety in systems of two coupled scalar fields in two space-time dimensions. Phys. Rev. D 65, 085012 (2002). arXiv:hep-th/0201200
V.A. Gani, N.B. Konyukhova, S.V. Kurochkin, V.A. Lensky, Study of stability of a charged topological soliton in the system of two interacting scalar fields. Comput. Math. Math. Phys. 44, 1968 (2004). arXiv:0710.2975
V.A. Gani, N.B. Konyukhova, S.V. Kurochkin, V.A. Lensky, Study of stability of a charged topological soliton in the system of two interacting scalar fields. Zh. Vychisl. Mat. Mat. Fiz. 44, 2069 (2004). arXiv: 0710.2975
A. Alonso-Izquierdo, D. Bazeia, L. Losano, J. Mateos, Guilarte, new models for two real scalar fields and their Kink-like solutions. Adv. High Energy Phys. 2013, 183295 (2013). arXiv:1308.2724
D. Bazeia, A.S. Lobão Jr., L. Losano, R. Menezes, First-order formalism for twinlike models with several real scalar fields. Eur. Phys. J. C 74, 2755 (2014). arXiv:1312.1198
H. Katsura, Composite-kink solutions of coupled nonlinear wave equations. Phys. Rev. D 89, 085019 (2014). arXiv:1312.4263
V.A. Gani, M.A. Lizunova, R.V. Radomskiy, Scalar triplet on a domain wall: an exact solution. JHEP 04, 043 (2016). arXiv:1601.07954
V.A. Gani, M.A. Lizunova, R.V. Radomskiy, Scalar triplet on a domain wall. J. Phys.: Conf. Ser. 675, 012020 (2016). arXiv:1602.04446
S. Akula, C. Balázs, G.A. White, Semi-analytic techniques for calculating bubble wall profiles. Eur. Phys. J. C 76, 681 (2016). arXiv:1608.00008
V.A. Gani, A.A. Kirillov, S.G. Rubin, Classical transitions with the topological number changing in the early Universe. JCAP 04, 042 (2018). arXiv:1704.03688
V.A. Gani, A.A. Kirillov, S.G. Rubin, Transitions between topologically non-trivial configurations. J. Phys. Conf. Ser. 934, 012046 (2017). arXiv:1711.07700
A.E. Kudryavtsev, Solitonlike solutions for a Higgs scalar field. JETP Lett. 22, 82 (1975)
A.E. Kudryavtsev, Solitonlike solutions for a Higgs scalar field. Pis’ma v ZhETF 22, 178 (1975)
D.K. Campbell, J.F. Schonfeld, C.A. Wingate, Resonance structure in kink-antikink interactions in \(\varphi ^4\) theory. Physica D 9, 1 (1983)
M.A. Lohe, Soliton structures in \(P(\varphi )_2\). Phys. Rev. D 20, 3120 (1979)
V.A. Gani, A.E. Kudryavtsev, M.A. Lizunova, Kink interactions in the (1+1)-dimensional \(\varphi ^6\) model. Phys. Rev. D 89, 125009 (2014). arXiv:1402.5903
A. Moradi Marjaneh, V.A. Gani, D. Saadatmand, S.V. Dmitriev, K. Javidan, Multi-kink collisions in the \(\phi ^6\) model. JHEP 07, 028 (2017). arXiv:1704.08353
P. Dorey, K. Mersh, T. Romanczukiewicz, Y. Shnir, Kink-Antikink Collisions in the \(\phi ^6\) Model. Phys. Rev. Lett. 107, 091602 (2011). arXiv:1101.5951
A. Khare, I.C. Christov, A. Saxena, Successive phase transitions and kink solutions in \(\phi ^8\), \(\phi ^{10}\), and \(\phi ^{12}\) field theories. Phys. Rev. E 90, 023208 (2014). arXiv:1402.6766
V.A. Gani, V. Lensky, M.A. Lizunova, Kink excitation spectra in the (1+1)-dimensional \(\varphi ^8\) model. JHEP 08, 147 (2015). arXiv:1506.02313
V.A. Gani, V. Lensky, M.A. Lizunova, E.V. Mrozovskaya, Excitation spectra of solitary waves in scalar field models with polynomial self-interaction. J. Phys.: Conf. Ser. 675, 012019 (2016). arXiv:1602.02636
H. Weigel, Emerging Translational Variance: Vacuum Polarization Energy of the \(\varphi ^6\) kink. Adv. High Energy Phys. 2017, 1486912 (2017). arXiv:1706.02657
H. Weigel, Vacuum polarization energy for general backgrounds in one space dimension. Phys. Lett. B 766, 65 (2017). arXiv:1612.08641
P. Dorey et al., Boundary scattering in the \(\phi ^4\) model. JHEP 05, 107 (2017). arXiv:1508.02329
D. Bazeia, M.A.González León, L. Losano, J.Mateos Guilarte, Deformed defects for scalar fields with polynomial interactions. Phys. Rev. D 73, 105008 (2006). arXiv:hep-th/0605127
R.V. Radomskiy, E.V. Mrozovskaya, V.A. Gani, I.C. Christov, Topological defects with power-law tails. J. Phys.: Conf. Ser. 798, 012087 (2017). arXiv:1611.05634
E. Belendryasova, V.A. Gani, Scattering of the \(\varphi ^8\) kinks with power-law asymptotics. arXiv:1708.00403
E. Belendryasova, V.A. Gani, Resonance phenomena in the \(\varphi ^8\) kinks scattering. J. Phys.: Conf. Ser. 934, 012059 (2017). arXiv:1712.02846
L.E. Guerrero, E. López-Atencio, J.A. González, Long-range self-affine correlations in a random soliton gas. Phys. Rev. E 55, 7691 (1997)
B.A. Mello, J.A. González, L.E. Guerrero, E. López-Atencio, Topological defects with long-range interactions. Phys. Lett. A 244, 277 (1998)
L.E. Guerrero, J.A. González, Long-range interacting solitons: pattern formation and nonextensive thermostatistics. Physica A 257, 390 (1998). arXiv:patt-sol/9905010
M. Peyrard, D.K. Campbell, Kink-antikink interactions in a modified sine-Gordon model. Phys. D 9, 33 (1983)
D.K. Campbell, M. Peyrard, Solitary wave collisions revisited. Phys. D 18, 47 (1986)
D.K. Campbell, M. Peyrard, P. Sodano, Kink-antikink interactions in the double sine-Gordon equation. Phys. D 19, 165 (1986)
V.A. Gani, A.E. Kudryavtsev, Kink-antikink interactions in the double sine-Gordon equation and the problem of resonance frequencies. Phys. Rev. E 60, 3305 (1999). arXiv:cond-mat/9809015
H. Weigel, Kink-Antikink Scattering in \(\varphi ^4\) and \(\phi ^6\) Models. J. Phys.: Conf. Ser. 482, 012045 (2014). arXiv:1309.6607
I. Takyi, H. Weigel, Collective coordinates in one-dimensional soliton models revisited. Phys. Rev. D 94, 085008 (2016). arXiv:1609.06833
A. Demirkaya et al., Kink dynamics in a parametric \(\phi ^6\) system: a model with controllably many internal modes. JHEP 12, 071 (2017). arXiv:1706.01193
H.E. Baron, G. Luchini, W.J. Zakrzewski, Collective coordinate approximation to the scattering of solitons in the (1+1) dimensional NLS model. J. Phys. A: Math. Theor. 47, 265201 (2014). arXiv:1308.4072
K. Javidan, Collective coordinate variable for soliton-potential system in sine-Gordon model. J. Math. Phys. 51, 112902 (2010). arXiv:0910.3058
I. Christov, C.I. Christov, Physical dynamics of quasi-particles in nonlinear wave equations. Phys. Lett. A 372, 841 (2008). arXiv:nlin/0612005
V.A. Gani, A.E. Kudryavtsev, Collisions of domain walls in a supersymmetric model. Phys. Atom. Nucl. 64, 2043 (2001). arXiv:hep-th/9904209
V.A. Gani, A.E. Kudryavtsev, Collisions of domain walls in a supersymmetric model. Yad. Fiz. 64, 2130 (2001). arXiv:hep-th/9912211
J.K. Perring, T.H.R. Skyrme, A model unified field equation. Nucl. Phys 31, 550 (1962)
R. Rajaraman, Intersoliton forces in weak-coupling quantum field theories. Phys. Rev. D 15, 2866 (1977)
N.S. Manton, An effective Lagrangian for solitons. Nucl. Phys. B 150, 397 (1979)
P.G. Kevrekidis, A. Khare, A. Saxena, Solitary wave interactions in dispersive equations using Manton’s approach. Phys. Rev. E 70, 057603 (2004). arXiv:nlin/0410045
D. Bazeia, L. Losano, J.M.C. Malbouisson, Deformed defects. Phys. Rev. D 66, 101701 (2002). arXiv:hep-th/0209027
C.A. Almeida, D. Bazeia, L. Losano, J.M.C. Malbouisson, New results for deformed defects. Phys. Rev. D 69, 067702 (2004). arXiv:hep-th/0405238
D. Bazeia, L. Losano, Deformed defects with applications to braneworlds. Phys. Rev. D 73, 025016 (2006). arXiv:hep-th/0511193
D. Bazeia, E. Belendryasova, V.A. Gani, Scattering of kinks in a non-polynomial model. J. Phys. Conf. Ser. 934, 012032 (2017). arXiv:1711.07788
E.B. Bogomolny, Stability of classical solutions. Sov. J. Nucl. Phys. 24, 449 (1976)
E.B. Bogomolny, Stability of classical solutions. Yad. Fiz. 24, 861 (1976)
M.K. Prasad, C.M. Sommerfield, Exact classical solution for the ’t Hooft Monopole and the Julia-Zee Dyon. Phys. Rev. Lett. 35, 760 (1975)
P.M. Morse, H. Feshbach, Methods of Theoretical Physics (McGraw-Hill Book Co., New York, 1953)
D. Bazeia, E.E.M. Lima, L. Losano, Kinks and branes in models with hyperbolic interactions. Int. J. Mod. Phys. A 32, 1750163 (2017). arXiv:1705.02839
J. Cuevas-Maraver, P. Kevrekidis, F. Williams (eds.), The sine-Gordon model and its applications (Springer International Publishing, Switzerland, 2014)
D. Bazeia, E.E.M. Lima, L. Losano, Kinklike structures in models of the Dirac-Born-Infeld type. Ann. Phys. 388, 408 (2018). arXiv:1708.08512
Acknowledgements
The authors would like to thank Dr. Vadim Lensky for reading the manuscript and for valuable comments. This work was performed using resources of the NRNU MEPhI high-performance computing center. The research was supported by the Brazilian agency CNPq under contracts 455931/2014-3 and 306614/2014-6, and by the MEPhI Academic Excellence Project under contract No. 02.a03.21.0005, 27.08.2013.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Funded by SCOAP3.
About this article

Cite this article
Bazeia, D., Belendryasova, E. & Gani, V.A. Scattering of kinks of the sinh-deformed \(\varphi ^4\) model. Eur. Phys. J. C 78, 340 (2018). https://doi.org/10.1140/epjc/s10052-018-5815-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-018-5815-z