
Abstract
Experiments with groups of fish inside a circular tank have provided valuable insights into the nature of leadership in social groups. Sophisticated mathematical models were constructed with a view to recovering observed schooling and leadership behavior in such experiments. Here, and with the help of variations on a promising class of such models, we explore a dual set of social concerns, namely the likelihood of permanent evasion from a cohesive group by a controlled individual in confinement. Our minimal model reduces to a leader-follower configuration, with cone-of-vision driven interactions inside a circular domain. We show that the resulting dynamical system sustains a rich supply of non-aligned, straying “follower” states, the dynamics on which displays (chaotic) intermittency between boundary following behavior and infrequent long flights. We map these states in configuration space and explore transitions between them. We demonstrate robustness of observed behavior by considering model variations, as well as alternate leader control trajectory. While it is too early to draw the implications of leader-follower dynamics to collective behavior, we do confirm that a model stray fish relates to a self-organized school bouncing back and forth along the diameter very much like a follower responds to a point leader in our model. We further draw the implications of our results to the study of dynamical systems with discontinuities, robotics, and the study of human behavior in the face of normative control and confinement.
Similar content being viewed by others


Introduction
Self-organizing behavior of living organisms is ubiquitous. From the smallest to the largest scales, collective structures obtain and have received the attention of biologist, etiologists, sociologists, and increasingly physicists and mathematicians1,2,3,4,5. Phenomena range from bacteria swimming in formation, to swarming insects, to flocking birds, to schooling fish, to herds of wilder beast, to milling worshipers etc6,7,8,9. Controlled experiments whether on fish in tanks, or pedestrians in crowds are now added to a rich tradition of observational techniques deployed in the subject10,11,12,13. What is common to these works (and associated mathematical models) is an increasing focus on the nature of leadership in groups of animals moving in and out of coherent structures. Here, we identify novel formations of organisms in confinement and suggest a mechanism that gives rise to transitions between them. Our concern is not to mimic reality in its bewildering complexity. Instead, we explore the complexity of behavior sustained by simplified and reasonably grounded models, with a view to evaluating their relevance to one biological (and/or sociological) setting or the other. With this in mind, we adopt a promising recipe for alignment of fish as described in10 with the addition of interactions via a cone of vision as motivated in13,14,15. This model differs from novel recent minimal models which disregard the velocity-velocity alignment effect16,17 and whose universality is still debatable15,18,19. We then constrain organisms to move in a circular tank with a reflective boundary, having further split them into a leader bouncing on an invariant trajectory, and a follower which is responding to intermittent forcing by that leader. In pursuit of patterns sustained by our construct, we were lead away from popular concerns with the self-organization of a herd and its leaders, to the seeming inevitability of straying in confinement, and this despite a persistent will to align. We start with a brief description of our model, followed by an exhibit of typical behavior, then variations that test for robustness, and end by drawing implications of our results to a network of diverse fields.
“Fish” in our reference model are point particles with coordinates (ri, θi), moving with a velocity vector \({\overrightarrow{v}}_{i}\), of constant magnitude \({\rm{v}}\), and varying direction ϕi as measured from the positive horizontal x-axis. They move inside a tank with a reflective circular boundary, centered at the origin of the coordinate system10. A model fish will interact and try to align with companions that are in its cone of vision which, at any given instant, is given by the minor circular sector enclosed between two rays cast symmetrically about its line of motion (along its instantaneous velocity vector), and the corresponding arc on the circular tank. We found it convenient to use COV to refer to both the cone of vision itself, as well as to the half aperature of that cone which can take values between 0 (no visibility) and π (full visibility). COV-mediated interaction is a biologically motivated alternative to topological interaction with Voronoi neighbors considered in10 [Note: In order to investigate information propagation during a leadership event in a fish school, Bayesian model selection was employed to test the marginal likelihood of four different models: metric, topological, Voronoi, and visual interactions14. The latter, which relies on the cone of vision algorithm described in the supplementary material of14, outperformed the others. It thus appears that significant information is provided by distinct neighbors, perhaps an adaptive strategy to dealing with the environment’s threats and uncertainties. This hypothesis is supported by substantial computational evidence in13]. A fish’s angular velocity wi is adjusted according to the average behavior of members of the collective who happen to be in its COV:
where,
Here ξ is a persistence length scale, COVi the cone of vision of fish i, \({w}_{i}^{\ast }\) the aligning social interaction term with coupling strength κ. Our COV-algorithm is a simplified version of the one in14, having dropped attraction and noise from the picture [see below for a noisy variation on the fiducial model]. Now comes a critical feature of our exercise which consists of further quenching dynamics down to two entities interacting in a leader-follower configuration. The leader moves along the vertical diameter of the circular boundary where it reflects elastically and is not affected by the follower. The follower tries to align with the leader whenever it is in its cone of vision and also reflects elastically from the circular enclosure [Note: In the context of schooling, the leader can be thought of as embodying the effective mean field of an organized group, a thought which we substantiate below, under subsection “The Leader as a group”]. The motion of the follower satisfies equations (1) and (2) with the leader being the only other particle it interacts with. We express these equations in dimensionless form, with the characteristic timescale \(\tau =\frac{\xi }{v}\) (the time taken by the fish to adjust its angular velocity) and length scale R (the radius of the tank) taken as respective units. Thus the non-dimensional update equations for the angular velocity and the position of the follower ω(t) are now given by:
with
where C1 = τκ (the ratio of the time taken by the follower to change its orientation to the time it takes it to get affected by the leader), \({\varphi }_{L}(t)=\pm \,\frac{\pi }{2}\) and ϕ(t) are the orientations of the velocity vectors of the leader and the follower respectively and \({C}_{2}=\frac{v\tau }{R}\) (ratio of the time needed to change orientation to the time needed to cross with a distance equal to the tank radius R). The space of parameters is thus reduced to the COV, C1 and C2. In the rest of this paper, we consider C1 = 1 and C2 = 0.006 consistent with the values of ξ, R and v favored in10, and we vary the COV in the range 0 < COV < π, where COV = π represents full panoramic vision. Variations on this model are discussed in the “Robustness to Variations” section below [refer to the Methods section for details on the numerical treatment of Eq. 3].
Results
Attractors
Within this reduced phase and parameter space, we were surprised by the rich, unfamiliar, and to our mind highly significant behavior that remains possible. We had left ourselves with one single parameter COV with which to map out the dynamical evolution of one single member follower which is desperately seeking reunion with the group leader, while bouncing from the boundary of their mutual confinement. Varying that parameter, we explored random initial conditions for the follower on the boundary (the leader in these experiments is initially set at the base of the vertical diameter heading up), noting steady state behavior, to the best of our computational abilities and resources. A summary of typical behavior follows:
The Vertical Attractor
Here the follower gradually approaches the leader on its diameter through a sequence of bounces off the boundary. Total alignment with the group, the outcome most thoroughly studied traditionally, is achieved asymptotically. One naturally expects that such alignment would obtain for a large enough COV. What one does not expect is that a blindingly small COV, coupled to the ever-present elastic boundary, promotes it equally well. For narrow COV, the follower hits the boundary at a spread of angles before it aligns with the leader and eventually gets attracted to it (Fig. 1a). For large COV, the follower directly aligns with the leader and asymptotically approaches the vertical diameter with each reflection at the wall (Fig. 1b). As evident in Fig. 2, alignment with the leader along its diameter is the favored outcome for COV < 0.75, 1.1 < COV < 1.34 and COV > 2.

Attractors. Shown are samples of final states, with the leader (in red) and the follower (in blue): the vertical attractor in (a and b) (COV = 0.15 and COV = 2 respectively); the eight-figure attractor in (c) (COV = 1.6); the head-phone attractor in (d) (COV = 0.85). The insets in (b–d) elucidate the follower’s repeated short bounces near the boundary.

Phase Diagram. For each value of the COV, 50 trajectories with varying initial conditions are sorted. We display the probability of falling into each of the attractors described in the “Attractors” section. For COV < 0.75 the vertical attractor dominates in spite of the long time needed to get to it; for 0.75 < COV < 1.1 it coexists with the head-phone attractor which in its best situations attracts half of the trajectories; for 1.1 < COV < 1.34 the vertical attractor dominates again; for 1.35 < COV < 1.96 the probability of falling into the vertical attractor drops drastically in favor of the eight-figure attractor; eventually, for COV > 1.96 the vertical attractor dominates again by attracting all 50 trajectories.
The Eight-Figure Attractor
A sample of this regime of entrapment is shown in Fig. 1c. A look at Fig. 2 reveals its presence for 1.35 < COV < 1.96 and its dominance for 1.5 < COV < 1.7. After a short transient, the follower is eventually trapped in an eight-figure which interleaves numerous short bounces by the follower (with the leader in sight after each bounce) and long range flights at points where the leader reverses direction at the boundary. Take-off and landing points (4 in total, making for the anchors of the eight-figure) fluctuate about mean vertices, with the cycle replaying while never exactly repeating. The transition in and out of this trap is neatly mapped by following the angular separation A12 between the mean position of neighboring anchors (1 and 2) as a function of the COV. As evident in Fig. 3, with increasing COV a transition point is hit beyond which A12 grows smoothly. With this transition, the vertical attractor gives way to an increasingly well defined eight-figure attractor. The latter dominates with larger COV till another sharp transition is hit, now resulting in a sudden drop in A12: the eight-figure trap unravels to the pull of an overwhelming leader, and and succumbs to efficient alignment into a vertical attractor.

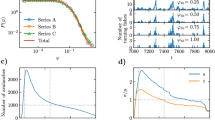
An Order Parameter for the Eight-figure. The orbit averaged angular separation A12 between vertices 1 and 2 of Fig. 1c provides a clean order parameter with which to map the eight-figure phase with increasing COV. We display the mean value of A12 over all cycles in a given trajectory, and over 50 trajectories with varying initial conditions, and the same COV. Near zero values of A12 indicate that the follower is hitting the upper (hence the lower) part of the circular tank at neighboring points, and that the follower is thus approaching the vertical attractor. Increasingly larger values of A12 indicate an increasingly well defined eight-figure attractor. Transition in and out of the eight-figure attractor is evident at COV ~ 1.3 and COV ~ 2 respectively.
Head-Phone Attractor
The eight-figure attractor is not alone in trapping the straying follower. Another even more curious regime of control away from alignment appears for a narrow range of the COV (0.8 < COV < 1.1) (Fig. 2). We called it the head-phone attractor (Fig. 1d shows an example for COV = 0.85). Similar to the eight-figure attractor, it is repetitive without showing signs of relaxation into a periodic limit cycle. A strange attractor of sorts, its full (mathematical) structure remains to be unraveled. Its shape changes as a function of the COV while maintaining the distinctive feature of a follower spending much of its time tangent to the boundary. Close to the first transition point (COV ~ 0.8), the trajectory of the follower resembles the polygons of a classical circular billiard, before curving and falling into the head-phone attractor beyond transition. Around the second transition (COV ~ 1.1), the central trajectories of Fig. 4 are favored as transients.

Behavior around Transitions. The follower enters into distinct transient regimes around transitions in and out of trapping states. In panels (a–c), the follower is shown near the critical point for transition to the eight-figure attractor (COV = 1.3, 1.31 and 1.32 respectively). The follower lingers over nearly central trajectories and alternates between right and left eight-figure attractors before settling on the vertical attractor for good. In panels (d–f), we show the follower’s transients trajectories near the critical points for emergence and disappearance of the head-phone attractor (COV = 0.75, 1.05 and 1.06 respectively). A similar pattern of lingering over near-radial orbits and alternation between attractors is observed.
In summary, and as synthesized in the phase diagram of Fig. 2, small and large COV favors the vertical attractor, while the head-phone and eight-figure attractor obtain over intermediate values of the COV. Not surprisingly the time scale for alignment with the vertical attractor is longest for the smallest COV and shortest for the largest COV. At transitions between vertical, head-phone, and eight-figure attractors, the follower lingers over numerous nearly central trajectories (Fig. 4) before settling on one regime or the other. These repeated excursions result in a spike of the time elapsed before settling into the ultimate attractor. We shall have more to say on this and related questions raised by the phase diagram in a forthcoming work.
Robustness to Variations
The upshot of this overview of final states is that, within a rather minimal set of assumptions, one has a prevalence of non-aligned, straying states, over a respectable range of the control parameter, the COV. Importantly, this is not a freakish property of a very special model. Below, we briefly discuss intra- and inter-model variations on the results presented above, with the aim of assessing the robustness of those results.
Initial Conditions/Model Parameters
We explored a range of initial conditions for the follower inside the circle (not just at the boundary). This amounts to varying the initial phase shift for the follower relative to the leader. Transients aside, the same pattern of steady states emerged, as a function of the COV. The same is true of model parameters C1 and C2 albeit, with changes in the ranges over which those stray states obtain.
The Leader as a Group
Earlier in the introduction we claimed that the leader can be understood as the effective mean field of an organized group of fish. To support this claim, we generated a school of fish, all packed tightly while initially oriented along the diameter, and interacting with each other (as well with any stray member) following Eqs [1 and 2]. We report that such a school of COV-coupled fish follows the diameter while maintaining its cohesion through bounces, and that a straying member relates to the mean orientation of the school as a follower would relate to the orientation of the single particle in the position of the leader. So it would seem that we are justified in quenching internal degrees of freedom in a school, provided its members are held tightly enough along a diameter. What this admittedly encouraging outcome has to say about stray states in fully and freely interacting schools of fish is hard to tell, at least not before extensive simulations of such COV-coupled schools in confinement.
Leader Along the Rim
The tank’s circular boundary provides a natural periodic alternative to the diameter as a locus of the leader’s path. The follower’s response to a leader winding around the rim is qualitatively similar to the case with the leader on a diameter: the follower ends up aligned with the leader for small and large enough COV, with preference for landing on non-aligned states for intermediate COV. Non-aligned states include rotating variants of the eight-figure attractor.
Direct Follower Response
Here we perturb the model drastically by removing one dynamic degree of freedom: instead of the gradual relaxation of w described by equation (3) the equality \(w={w}^{\ast }\) is imposed at all moments, equivalent to taking the persistence length ξ to zero. We expected to loose a number of the observed features in the process, given how the interplay between avoidance and alignment thrives on the gentle curving of the follower’s gaze together with sharp turn-around at the boundary. We were surprised to find the same qualitative outcome of follower landing on straying attractors (sharper versions of the head-phone and eight-figure attractors) for intermediate COV and aligning with the vertical attractor for COV small or large enough.
Noise and/or Boundary Softening
Last but not least, we wonder about the fate of the remarkable stray attractors when deterministic dynamics in our idealized model is perturbed by noise, and when specular reflection is replaced by a softer boundary-avoiding prescription. White Gaussian noise and a softer wall can be incorporated explicitly10, with w(t) now obeying a stochastic differential equation:
where C is a measure of noise intensity, N(t) is chosen from a normal distribution with unit variance, and w*(t) is updated to include the effect of the wall as follows:
The constant kw sets the reaction to the wall and has the meaning of a characteristic wall layer thickness; dfw is the distance between the follower and the point A where its line of motion intersects the wall, and ϕfw is the angle between that line of motion and the normal to the surface of the tank at A.
With \(\tau =\frac{\xi }{v}\), and R (the radius of the tank) taken as respective time and length scales, we rewrite the above equations in non-dimensional form
where w* is:
with D = τ3C, C1 = τk, \({K}_{w}=\frac{\tau {k}_{w}}{R}\) and \({C}_{2}=\frac{v\tau }{R}\).
The follower is now subject to three coupled perturbations: the drive to align with the leader when in the COV, the randomizing effect of noise, and the soft turns induced by the wall. The three effects are controlled by the non-dimensional parameters C1, D, and Kw respectively.
Keeping C1 = 1 and C2 = 0.006 as before, we explore for a start follower dynamics with specular reflection at the wall, in the presence of noise. Note that with our choice of the time-step dt = 10−3, the noise term is comparable to the maximum amplitude of the alignment term (assuming an initially straight trajectory) for the crossover value D = Dcross = 10−3. In order to better understand the expected noise effects, we notice that for a freely moving follower in the absence of the leader (w* = 0) Eq. (5) describes a standard Ornstein-Uhlenbeck process20. For such a noise-modified free motion the mean-square angular deviation would asymptotically grow with time diffusively as \(\langle {(\varphi (t)-\varphi (0))}^{2}\rangle =Dt\). Over the time required for a full tank traversal, \(T=\frac{2R}{\tau v}=2/{C}_{2}\), the rms angular deviation would be given by \(\delta {\varphi }_{rms}={(2D/{C}_{2})}^{1/2}\). Thus, at the crossover noise, δϕrms ≈ 0.58 which is of order one as expected. We sweep over D and report the following: i. for D as large as 102 × Dcross traces of the eight-figure attractor are maintained; ii. for D = Dcross the eight-figure is maintained, but the headphone attractor is long lost; iii. for D smaller than 4 × 10−5 both the head-phone and the eight-figure attractors survive. Note that for D = 4 × 10−5 the magnitude of the noise term is about 20% of the alignment term, and the rms angular deviation over the tank traversal time is δϕrms ≈ 0.12. Samples of noisy eight-figure and headphone attractors, then an instance of a headphone lost to alignment with the leader, are shown in Fig. 5, displaying simulations with representative values of D at Kw = 0.

Eight-figure and Headphone Attractors with Noise Incorporated. Shown are samples of final states with the leader (in red) and the follower (in blue): (a) a diffuse eight-figure attractor (D = 0.05, Kw = 0 and COV = 1.6); (b) a not-so-sharply-defined head-phone attractor (D = 10−5, Kw = 0 and COV = 0.85); and (c) a dissolved head-phone attractors, with the follower ultimately aligning with the leader, after wandering repeatedly over head-phone like behavior (D = 0.001, Kw = 0 and COV = 0.86).
If, on the other hand, we set D = 0 and sweep over Kw, attractors evolve in the following fashion: i. For Kw smaller than 3 × 10−5 both the headphone and eight-figure attractors survive; ii. In addition to that, for 4 × 10−6 < Kw < 3 × 10−5, a new leader-avoiding triangular attractor emerges having one side nearly parallel to the vertical attractor and a vertex opposite to this side on the circumference of the tank (Fig. 6 panel (a)); iii. for 3 × 10−5 < Kw < 10−4 the headphone attractor disappears while the eight-figure attractor survives; iv. for Kw > 10−4, new leader-avoiding attractors emerge, reflecting a tension between alignment and strong boundary avoidance. We show typical such attractors in panels b–f of Fig. 6.

Novel Leader-Avoiding attractors. Shown are samples of final states, with the leader (in red) and the follower (in blue) with D = 0 and COV and Kw varying as follows: (a) COV = 0.45 and Kw = 10−4; (b) COV = 0.4 and Kw = 0.01; (c) COV = 0.4 and Kw = 0.01; (d) COV = 2 and Kw = 0.01; (e) COV = 1.6 and Kw = 0.1; and (f) COV = 2 and Kw = 0.1.
Finally, and sweeping over Kw and D simultaneously, we find that both headphone and eight-figure attractors survive for D ≤ 4 × 10−5 and Kw ≤ 3 × 10−5. Allowing for moderate noise and soft reaction to wall with D = 10−5 and Kw = 10−5, we recover in Fig. 7 an analogue of the phase diagram of Fig. 2. Comparing both diagrams, we observe that the headphone and eight-figure leader avoiding attractors are maintained over the same intervals of COV, however the maximum probabilities for obtaining them are somewhat smaller in the presence of noise and boundary softening. Results in Fig. 7 are based on the final states of trajectories followed for 150 T (full tank traversal times). With long-term stability in mind, we followed straying trajectories for longer durations, confirming the survival of figure-eight attractors for as long as 3000 T.

Phase Diagram with Noise and Boundary Softening Incorporated. For each value of the COV, 50 trajectories with varying initial conditions are sorted with Kw = 10−5 and D = 10−5. We display the probability of falling into each of the attractors described in the “Attractors” section. For COV < 0.7 the vertical attractor dominates in spite of the long time needed to get to it; for 0.7 < COV < 1 it coexists with the head-phone attractor which in its best situations attracts 40 percent of the trajectories; for 1 < COV < 1.3 the vertical attractor dominates again; for 1.3 < COV < 2 the probability of falling into the vertical attractor drops in favor of the eight-figure attractor; eventually, for COV > 2 the vertical attractor dominates again by attracting all 50 trajectories. All simulations were done with dt = 10−3.
We have here barely touched on the complex dynamical behavior ushered by noise and reaction to the wall. In addition to classifying novel attractors, their nature, origin and stability to perturbations in model parameters, one naturally worries about long term stability of attractors in the presence of noise. Whether stray attractors are only metastable (albeit with a very long lifetime) and whether noise-driven transitions between attractors may account for the experimentally observed intermittent behavior remain intriguing open questions which, along with those raised by the variations above, shall make for an interesting follow up to the present report.
For now, and having explored variations which tested extremes (whether in the leader’s trajectory, or the follower’s response), then allowed for noise and softer wall reaction, we can safely speak of a robust and relatively high probability of stray behavior over a broad range of COV. Try as we may, it seems that a follower confined within a reflecting boundary with a leader dictating alignment when in sight, remains with substantial freedom to stray when the cone of vision is broad enough for the boundary to help structure its motion away from the leader, and not too broad to find itself overwhelmed by that leader.
Discussion
We were guided to the reported vault of unusual behavior by wondering whether communication through visual cues inside a closed circular domain can account for the observed alternation between coexisting self-organized phases in shoals of fish12. To be sure, our reduced leader-follower model is too crude to answer this question. Still, we find in its unusual phases, and transitions between them, an incitement to further explore visual communication networks. In fact, the COV was established as the most likely mode of information spreading in a fish school13,14. Variations in the COV are expected to occur naturally with the field of view of a given fish getting occluded by other shoal members or obstacles. We showed that such variations can lead to disruption of, if not shifts between attractors. We are thus tempted to ask: Could temporal variations in the effective COV of a given fish -variations which may result from the play of shadows and clearings in a shoal- lead to transitions from one self-organized state to the other and back?
On the other hand, and as already apparent from the presentation above, our results thrive at the interface between dynamical systems theory, systems control, and ultimately, and most interestingly, the study of human social behavior. We wish to conclude our exposition by briefly drawing out the connections and implications of our work in these fields.
The dynamics of a particle bouncing off a closed boundary belongs to the vast field of mathematical billiards21,22,23. It is not exactly the right place to review the literature. We simply point out the novel ways in which our system and associated results couple to the field: a- classically, a single particle is allowed to bounce off an enclosure of arbitrary shape; here we consider the controlling effect of a perturber/mean field confined with the particle: the resulting dynamics is no longer Hamiltonian, with strange attractors arising in the process; b- classically, when more than one particle are considered, it is with local collisional interactions in mind; here, we consider long range, intermittent interactions with the controlling agent; c- classically, the departure of the boundary from circular allows for Hamiltonian chaos; here dissipative irregular behavior over attractors emerges within a circular domain. The models we consider, and the behavior they sustain make for open mathematical questions which are best addressed within the growing field of dynamical systems with discontinuities24,25. There one learns that novel behavior arises when a particle hits the surface of discontinuities along a tangent, so called grazing orbits; here we have preliminary indications (Fig. 4) that the angle at which the particle encounters the boundary, how close it happens to be to the normal, plays a role around transitions from one attractor to another. Our exercise is complicated by the coupling between two sources of discontinuity, the reflective boundary, as well as visual encounters with the leader on its periodic trajectory. Anything more definite will have to await further experimentation, and careful mathematical analysis.
Pursuit-evasion problems26 come to mind in relation to our exercise. There the follower is programmed to head straight towards a moving target, with the design of intercepting it; here one asks about the possibility of eventual alignment with intermittent cone of vision contact. A history of rewarding developments in pursuit-type problems suggests interesting variations to ours which we intend to “pursue” actively. On another note, one wonders about strategies for guiding a self propelled particle into a given regime of motion, within confinement. Our work provides an intriguing answer: a diametric sentinel which dictates alignment of a robot through a broad enough cone of vision can force it into an eight-figure or head-phone trajectory, without the need for continuous, active, monitoring.
It is straightforward to link our model and the non-aligned states which it sustains with physically inspired modeling of opinion dynamics, particularly when a collective is caught between the competing influence of media on one large scale, and that of neighboring social groups on another more local scale, with the undecided group playing a crucial role in the outcome27.
We would like to conclude the discussion section by drawing a provocative connection (deliberately speculative to be sure, but exciting nonetheless!) to a set of dynamically flavored observations by Milgram and Goffman, respectively. Works by both social scientists have inspired much mathematical modeling of social dynamical phenomena, with Milgram’s pioneering work on the “small world phenomenon”28 stimulating extensive studies of network(ed) dynamics (e.g.29), and Goffman’s insights into pedestrian traffic30,31 coupling to recent studies of crowd dynamics in public spaces7. Here, it is through their independent work on human response to conflicting pressures to conform, that we see them further informing socio-dynamical modeling31,32,33. The connection was largely stimulated by the explicitly dynamical language employed by both Milgram and Goffman, in settings which we believe are germane to ours. [Note: it goes without saying that highlighting affinities between our work and the social insights of Milgram and Goffman is a long way from implying anything secure about the connection which would require extensive modeling of related socio-dynamical settings. The later is of course beyond the scope of our humble contribution]. In experiments probing “the conditions of obedience and disobedience to authority”32, Milgram’s subject is caught between obedience to authority and compassion with the victim. Milgram notes variations in the subject’s response with closeness of authority, and proximity to the victim, describing the two influences as fields of force that weaken with distance. Milgram notes the tension between the two influences, promoting erratic behavior in the subject, all the while being trapped in a conflicting state without the sufficient strength to terminate the experiment. Similarly, the particle in our experiments is caught between the leader’s normative (but intermittent) influence and the boundaries reflective perturbation, and finds itself with sufficient (though not overwhelming) strength/presence of authority, trapped in shall we say un-willfull states of incomplete obedience. With our follower’s predicament in mind, one wonders how Milgram’s results would have come out with intermittent rather than persistent intervention by authority, whether close or far. Equally suggestive, and perhaps more tempting to dialogue with, is Goffman’s extensive treatment of an individual’s self as shaped (even constituted) by continuous dynamical interactions with the social environment34. Goffman was keenly interested in mapping the force fields (often times mediated by face-to-face interactions) which couple the individual to authority. For Goffman, a “gathering” is that interactive, confined and confining space in which a collective is self-regulated through those dynamically shifting force fields. Goffman notes that in a given “gathering”, the individual is constrained to maintain a consistent, “viable image in the eyes of others”. He further notes that due to the constant, and unexpected shift in local circumstances, adjustments will be continuously necessary, to the point that an individual’s sense of him- or her-self emerges as a dynamical byproduct of inter-face with fluctuating social encounters31. Could the trapping attractors of our follower in relation to a capricious leader, re-emerge, in a more sophisticated setting, as dynamical analog’s of Goffman’s “conception of the self as contingent in the sense of being only probabilistic, a theatre run of performances to audiences and critics whose responses are always in play, whose applause is never certain”?33 The curtain is drawn at this speculative note.
Methods
Equations 3 are solved using an Euler scheme with time step dt = 0.001: the position and orientation of the follower are integrated forward in time, while the leader moves unaffected along the vertical diameter, with the same speed as the follower. The leader’s position relative to the follower’s cone of vision is tracked in order to update ω* in Eq. 3.
Collisions with the boundary of both the follower and leader are treated as follows: when the updated particle’s position falls outside the boundary with a 10−10 margin the particle is reflected back into the circle. More precisely, we define \({\overrightarrow{v}}_{b}\) to be the velocity vector just before collision, \({\overrightarrow{r}}_{0}\) to be the vector joining the center of the circle and the point of intersection of \({\overrightarrow{v}}_{b}\) with the boundary, and \({\overrightarrow{v}}_{a}\) be the velocity vector after collision, which is shown to be:
Then we can write:
where ϕa, ϕb, and θ0 are the angles the vectors \({\overrightarrow{v}}_{a}\), \({\overrightarrow{v}}_{b}\), and \({\overrightarrow{r}}_{0}\) make with the positive x–axis respectively. Additionally, to balance out the traveled distance outside the boundary the position is updated as follows:
where \(c=x^{\prime} \,\cos \,{\varphi }_{b}+y^{\prime} \,\sin \,{\varphi }_{b}-\sqrt{1-{(x^{\prime} \cos {\varphi }_{b}-y^{\prime} \sin {\varphi }_{b})}^{2}}\), and (xa, ya), (x′, y′) and (x0, y0) are the particle’s coordinates before collision, outside the circle and those of \({\overrightarrow{r}}_{0}\) respectively. For each value of COV 50 instances with varying initial conditions were followed for 5 × 107 integration steps which amounts to 150 full tank traversal times. The results, which depend on initial conditions, are then summarized in the phase diagram.
Data Availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Vicsek, T., Czirok, A., BenJacob, E., Cohen, I. & Shochet, O. Novel Type of phase transition in a system of self-driven particles. Phys Rev Lett 75, 1226–1229 (1995).
Toner, J. & Tu, Y. Long-Range Order in a Two-Dimensional Dynamical XY Model: How Birds Fly Together. Phys Rev Lett 75, 4326 (1995).
Ramaswamy, S. The Mechanics and Statistics of Active Matter. Annu Rev Condens Matter Phys 1, 323–345 (2010).
Touma, J. R., Shreim, A. & Klushin, L. I. Self-organization in two dimensional swarms. Phys Rev E 81, 066106 (2010).
Flierl, G., Grunbaum, D., Levin, S. & Olson, S. From individuals to Aggregations: the interplay between behavior and physics. J Theor Biol 196, 397–454 (1999).
Jelsbak, L. & Sogaard-Andersen, L. Pattern formation by a cell surface-associated morphogen in Myxococcus xanthus. Proc Natl Acad Sci USA 99(4), 2032–2037 (2002).
Helbing, D., Frakas, I. & Vicsek, T. Simulating dynamical features of escape panic. Nature 407, 487–490 (2000).
Parrish, J. & Hamner, W. Three Dimensional Animal Groups (Cambridge University Press, 1997).
Toner, J. & Tu, Y. Flocks, herds, and schools: A quantitative theory of flocking. Phys Rev E 58, 4828–58 (1998).
Gautrais, J. et al. Deciphering Interactions in Moving Animal Groups. PLOS Comput Biol 8(9), e1002678 (2012).
Katz, Y., Tunstrøm, K., Ioannou, C. C., Huepe, C. & Couzin, I. D. Inferring the structure and dynamics of interactions in schooling fish. Proc Natl Acad Sci USA 108, 18720–18725 (2011).
Tunstrom, K. et al. Collective States, multistability and transitional behavior in schooling fish. PLoS Comput Biol 9, e1002915 (2013).
Rosenthal, S. B. et al. Revealing the hidden networks of interaction in mobile animal groups allows prediction of complex behavioral contagion. Proc Natl Acad Sci USA 112, 4690–4695 (2015).
Strandbug-Peshkin, A. et al. Visual Sensory Networks and effective information transfer in animal groups. Current Biology 23(17), 709–711 (2013).
Zhang, X., Jia, S. & Li, X. Improving the synchronization speed of self-propelled particles with restricted vision via randomly changing the line of sight. Nonlinear Dyn. 90, 43–51 (2017).
Barberis, L. & Peruani, F. Large-Scale Patterns in a Minimal Cognitive Flocking Model: Incidental Leaders, Nematic Patterns, and Aggregates. Phys. Rev. Lett. 117, 248001 (2016).
Peruani, F. Hydrodynamic Equations for Flocking Models without Velocity Alignment. JPS 86, 101010 (2017).
Costanzo, A. & Hemelrijk, C. K. Spontaneous emergence of milling (vortex state) in a Vicsek-like model. J. Phys. D 51, 134004 (2018).
Nilsson, S. & Volpe, G. Metastable clusters and channels formed by active particles with aligning interactions. N. J. Phys. 19, 115008 (2017).
Uhlenbeck, G. E. & Ornstein, L. S. On the theory of Brownian Motion. Phys Rev 36, 823–841 (1930).
Sinai, Ya. G. On the foundations of the ergodic hypothesis for a dynamical system of statistical mechanics. Sov. Math Dokl. 4, 1818–1822 (1963).
Berry, M. V. Regularity and chaos in classical mechanics, illustrated by three deformations of a ‘circular’ billiard. Eur J Phys 2, 91–102 (1981).
Lansel, S., Porter, M. A. & Bunimovich, L. A. One-particle and few-particle billiards. Chaos 16, 013129 (2006).
Filippov, A. F. Differential Equations with Discontinuous Righthand Sides. (Kluwer Academic Publ, Dordrecht, 1988).
Makarenkov, O. & Lamb, J. S. W. Dynamics and bifurcations of smooth systems: A survey. Physica D 241, 1826–1844 (2012).
Nihan, P Chases and Escapes: The Mathematics of Pursuits and Evasion (Princeton University Press, 2007).
Colliery, F. & Castellano, C. Interplay between media and social influence in the collective behavior of opinion dynamics. Phys Rev E 92, 042815 (2015).
Stanley, M. The Small World Problem. Psychology Today 1(1), 60–67 (1967).
Watts, D. J. & Strogatz, S. H. Collective dynamics of ‘small-world’ networks. Nature 393(6684), 440–442 (1998).
Goffman, E. Behavior in Public Places: Notes on the Social Organization of Gatherings. New York: Free of Glencoe (1963).
Goffman, E. Relations in Public: Microstudies of the Public Order. New York: Basic (1971).
Milgram, S. Some Conditions of Obedience and Disobedience to Authority. Human Relations 18, 57 (1965).
Hancock, Black Hawk & Garner, Roberta Towards a Philosophy of Containment: Reading Goffman in the 21st Century. The American Sociologist 42(4) (2011).
Goffman, E The Goffman reader, Eds Lemert, C. & Branaman, A. (Blackwell Publishers, 1997).
Author information
Authors and Affiliations
Contributions
J.T., S.N. and L.K. designed research. A.A. performed research, analyzed data, and produced figures. A.A. and J.T. wrote the paper with significant editorial input from S.N. and L.K.
Corresponding author
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Al-Sayegh, A.A., Najem, S.A., Klushin, L. et al. Unexpected stray attractors in confined leader-follower dynamics driven by cone-of-vision interactions. Sci Rep 9, 1699 (2019). https://doi.org/10.1038/s41598-018-37457-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-37457-y
- Springer Nature Limited