
Abstract
Lake surface water temperature (LSWT) is of vital importance for hydrological and meteorological studies. The LSWT ground measurements in the Tibetan Plateau (TP) were quite scarce because of its harsh environment. Thermal infrared remote sensing is a reliable way to calculate historical LSWT. In this study, we present the first and longest 35-year (1981–2015) daytime lake-averaged LSWT data of 97 large lakes (>80 km2 each) in the TP using the 4-km Advanced Very High Resolution Radiometer (AVHRR) Global Area Coverage (GAC) data. The LSWT dataset, taking advantage of observations from NOAA’s afternoon satellites, includes three time scales, i.e., daily, 8-day-averaged, and monthly-averaged. The AVHRR-derived LSWT has a similar accuracy (RMSE = 1.7 °C) to that from other data products such as MODIS (RMSE = 1.7 °C) and ARC-Lake (RMSE = 2.0 °C). An inter-comparison of different sensors indicates that for studies such as those considering long-term climate change, the relative bias of different AVHRR sensors cannot be ignored. The proposed dataset should be, to some extent, a valuable asset for better understanding the hydrologic/climatic property and its changes over the TP.
Design Type(s) | data collection and processing objective • statistical analysis and modeling objective • time series design |
Measurement Type(s) | temperature of water |
Technology Type(s) | satellite imaging |
Factor Type(s) | geographic location • size • temporal_interval |
Sample Characteristic(s) | Tibetan Plateau • lake |
Machine-accessible metadata file describing the reported data (ISA-Tab format)
Similar content being viewed by others


Background & Summary
Lakes, accounting for 1.8% of global land surface area1, support enormous biodiversity2 and provide water resources for industry and farming. Previous studies indicated that a change in lakes can impact local weather and climate3,4, hydrologic process5, and the land ecosystem2. As a result of climate change and complex human activities6, the area of lakes varied greatly (with 162,000 km2 having vanished and 21,300 km2 being born during the past 30 years7), and lake surface water temperature (LSWT) increased rapidly (0.34 °C decade−1)8. LSWT is a high-prior variable in earth observation systems, and it has been treated as a sensitive indicator of hydrologic/climatic properties and its changes9. Space-borne thermal infrared remote sensing provides the tool to examine the spatial distribution of LSWT in large and remote areas over decades10.
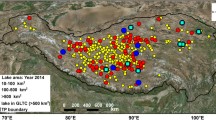
The Tibetan Plateau (TP), the highland area in Central Asia, also known as “the Third Pole” for its high elevation and extreme environment (Fig. 1), is the water source of several large rivers in Asia11 (e.g., the Yangtze, Mekong, and Indus). Recent studies showed the rapid area expansion of lakes (with 8300 km2)7 over the TP during the past four decades12,13. This expansion was highly related to the changes in regional climate and cryosphere conditions13 (e.g., air temperature14, precipitation15, evapotranspiration16, permafrost17, and glacier/snow18), while LSWT showed a mixed picture (warming for some lakes but cooling for others) since the year 20009,19. However, in order to obtain a deeper and more comprehensive understanding of its climatic-scale properties, LSWT data over the TP for a much longer time period are in great need.

In addition to very scarce in situ measurements, satellite-based remote sensing data have been used to retrieve LSWT datasets. Examples of global-scale LSWT datasets include the ARC-Lake20 (ATSR Reprocessing for Climate: LSWT & Ice Cover, http://www.laketemp.net/, version 3 from 1995–2012 was released in 2014) and the GLTC10,21 (dataset of lake temperature (1985–2009) created by the Global Lake Temperature Collaboration, www.laketemperature.org in 2015). These datasets have made great contributions to inland water science3,22. Examples of regional-scale LSWT datasets are the LSWT dataset of European Alpine lakes (1989–2013)23 using Advanced Very High Resolution Radiometer (AVHRR) data, and the LSWT dataset in the TP (2001–2015) derived from MODIS data24. Remote sensing-based datasets, in general, cannot achieve high temporal frequency and broader spatial coverage at the same time. For the two aforementioned global-scale datasets, there are only a few lakes within the TP region, i.e., only 8 lakes with seasonal data (4 times each year) from the GLTC, only 10 lakes with daily data available from 1995 to 2012, and another 89 lakes from 2002 to 2012 from the ARC-Lake. The MODIS-derived LSWT dataset24 was the first 15-year (2001–2015) comprehensive dataset of nighttime and daytime LSWT derived from 374 TP lakes (>10 km2 each). Aiming to fill the gap and to better understand the LSWT changes over a much longer period, this paper presents the longest 35-year (1981–2015) daytime LSWT data of all 97 large lakes (>80 km2 each) in the TP at daily, 8-day averaged and monthly averaged time scales, using the 4-km resolution AVHRR Global Area Coverage (GAC) level-1b data.
Methods
An overview of AVHRR payloads carried by National Oceanic and Administration (NOAA) satellites and European Space Agency (ESA) Meteorological Operational (MetOp) satellites is illustrated in Fig. 2. The flowchart for pre-processing, lake identification, LSWT dataset production and quality control is illustrated in Fig. 3.

An overview of the National Oceanic and Atmospheric Administration (NOAA) satellites and European Space Agency (ESA) Meteorological Operational (MetOp) satellites equipped with AVHRR. Afternoon satellites (NOAA-7, 9, 11, 14, 16, 18, and 19) had a mean acquisition time (in local solar time zone) of approximately 2:00 pm. Morning satellites (NOAA-12, 15, and 17) had a mean acquisition time of approximately 8:00 am. Acquisition time was designed as 9:30 am (midmorning) for MetOp satellites.

Flowchart for pre-processing, lake identification, lake surface water temperature (LSWT) dataset production and quality control. VZA: View Zenith Angle.
AVHRR GAC data calibration
The 1-km resolution data are only available over the TP region since May 2007. In order to maintain consistency in data processing, we used the 4-km GAC data over 1981–2015 to retrieve the LSWT. The level 1b GAC dataset is a reduced resolution image dataset that is processed onboard the satellite, taking only one line out of every three and averaging every four of five adjacent samples along the scan line. The GAC datasets used in this paper were downloaded from NOAA’s comprehensive large array-data stewardship system (www.class.ngdc.noaa.gov). The radiance in digital number (DN), AVHRR operational calibration coefficients, and ground control points (GCPs) are included in the GAC level 1b data. AVHRR band 1 (0.6 μm) and band 2 (0.8 μm) were calibrated into radiance; then, the radiances were converted to the top-of-atmosphere reflectance normalized by solar zenith angle as follows:
where N is the AVHRR band number (channel 1 or 2), and R(N) is the reflectance at channel N; λ1, λ2 are the lower and upper cut-off wavelengths of the channel, respectively. L is the in-band radiance (Wm−2sr−1), and θ is the solar zenith incident angle (pixels were excluded if θ < 10°). F0λ and τλ are, respectively, the extraterrestrial solar irradiance and the response of the AVHRR instrument at the wavelength λ25,26.
AVHRR thermal infrared (TIR) bands, i.e., band 4 (11 μm) and band 5 (12 μm), were calibrated into brightness temperature in kelvin. Linear radiance correction was applied to NOAA-12 and earlier instruments27. A nonlinear method was applied to NOAA-14 AVHRR and later28. The calibration intersects and slopes were contained in the AVHRR GAC header, and the calibration constants for each specified sensor were from25.
Clear-sky waterbody detection
A new Boolean layer was created to label all water pixels with a value of 1 and other pixels with a value of 0. Clear sky water pixels were detected based on the low reflectance nature of waterbodies in the near infrared (NIR) band29. Previous NIR-threshold-based water body detection methods29,30 to process daytime images were usually cloud-sensitive31 and were expressed as:
where reflectance values of the visible band and NIR band are used to detect water pixels.
We used a static threshold to detect the clear-sky water body, where Threshold1 = 15% (reflectance) and Threshold2 = 0.75 (unitless) in Eq. (2). Threshold2 = 0.75 was a relatively strict and effective constraint (same as32). Threshold1 = 15% was a weak constraint for eliminating the calibration errors, especially for a pixel with a large solar zenith angle. Using the above NIR-threshold method, dark pixels (e.g., cloud shadow and topography shadow) could be classified as water body by mistake30. The threshold of the band 1 to band 2 ratio in Eq. (2) was sensitive to shadow pixels under a 4-km resolution condition. Glacier pixels might be classified as water body, and these pixels were excluded during the “lake identification” processing step with a priori knowledge of the lake coverage.
Georeferencing and lake identification
Lake identification is the most important and challenging step before deriving LSWT. The information in the AVHRR file header was used to compute the image geometry. Nevertheless, AVHRR data, particularly the historical data before NOAA 14, have issues with large and inconsistent geometric and geolocation errors (1~20 pixels) due to AVHRR’s uncertain navigation and the clock error33,34,35. Precise geolocation is one of the most fundamental requirements for inland lake identification. Another issue that disturbs the lake identification is the change in lakes over time. It was reported that lakes in the TP region have been changing rapidly (e.g., over 70% of lakes show expansion) over the past decades, resulting in the spatial extent of these lakes varying considerably36,37. Water pixel-masked raster images created in the step above, along with lake boundary shapefiles derived from Landsat and China’s GaoFen-1 (GF-1) satellite36 were used to identify each lake. The 2002 lake boundary shapefile was used to identify lakes in the 1981–2004 AVHRR data, and the 2014 boundary shapefile was used to identify lakes in the 2005–2015 AVHRR data. AVHRR GAC data calibration and georeferencing were performed on the ENVI 5.3 platform and using Interactive Data Language (IDL) 8.5.
The two high spatial resolution lake shapefiles36 (2002 and 2014) were treated as the ground truth of waterbody distributions for the respective time periods (1981–2004 and 2005–2015). First, the water pixels in the water mask images were grouped into connected components (two pixels whose Δx ≤ 1 and Δy ≤ 1 were defined as “connected”), and groups with less than 3 pixels were removed. The connected components’ geometric centers were matched up with those in the lake shapefile using the random sample consensus (RANSAC) algorithm38, as a first-guess geometric correction: for each component in water-masked images and each polygon in the shapefile, a feature vector was generated in order to identify match-up pairs. We tried a series of features such as the minimum boundary rectangle, corner detector, and length to width ratio, and we found that the area of each component (or polygon) was effective and time efficient. Point pairs within the maximum geolocation error39 (approximately 20 pixels) and \(Threshold < Are{a}_{raster}/Are{a}_{vector} < 1\) were matched into pairs. The thresholds were 0.3 for large lakes (>500 km2) and 0.5 for other lakes. These empirical thresholds were determined through testing hundreds of images. With the point pairs generated above, we used the RANSAC algorithm to determine the position of the image. Affine matrices were generated with randomly selected pairs. The number of iterations was set to 10,000, and the maximum tolerance for each iteration was set to one pixel (4 km or approx. 0.04 degrees). After executing RANSAC, we obtained an affine matrix (affine matrix correction could improve the AVHRR geometry accuracy to pixel or sub-pixel level35) for geometric correction.
After the first-guess correction, a method was used to achieve a sub-pixel geolocation accuracy. The method was defined as
Where oX, oY are the offsets of geolocation along the X axis and Y axis, respectively. oX and oY would be iterated within ±1 pixel in order to maximize f(oX, oY), and \({S}_{cd}(oX,oY)\cap {S}_{lakeDS}\) and \({N}_{cd}(oX,oY)\cap {N}_{lakeDS}\) are the overlap area and the number of polygons intersected, respectively; k is an empirical parameter. In this study, we set k = 50. Pixels were grouped to definite lakes when the maximal f(oX, oY) was found.
Computation of LSWT
LSWT was retrieved through the split-window approach40,41. Differential atmospheric absorption of two adjacent TIR channels was utilized to retrieve land surface temperature. Temperature was computed through the AVHRR 11μm band and 12 μm band without any atmospheric profile information41. NOAA developed different split-window algorithms for different sensors. A multi-channel sea surface temperature (MCSST) split-window approach20,42,43 was used to compute LSWT of NOAA-11 and later sensors, and another daytime split-window algorithm was applied for NOAA-7, 926. The algorithms were as follows:
where T4, T5 are the brightness temperatures of AVHRR band 4 and band 5, respectively. The split-window coefficients for each sensor derived from buoy temperature data from the National Buoy Data Centre (http://www.ndbc.noaa.gov/) could be found in appendix E of NOAA’s POD User’s Guide and appendix G of NOAA’s KLM User’s Guide (https://www1.ncdc.noaa.gov). The MCSST algorithm has been successfully applied to retrieve surface temperature of inland lakes in the ARC-Lake dataset20 and other research such as44. With in situ LSWT observations or physical variables (e.g., aerosol profiles) used, LSWT can be derived with reasonable accuracy using lake-specific MCSST coefficients. Nevertheless, in the TP region with high altitude, the lake-specific methods, such as being used by the ARC-Lake, did not show higher accuracy than that using global coefficients (see discussion in “Technical Validation”). In this study, we chose to use the global coefficients to retrieve LSWT and compared the accuracy with other satellite-derived datasets such as MODIS and ARC-Lake.
Spatial average and temporal binning
Low quality LSWT values were first excluded using pixel-wise decision trees (more details are discussed in the following section, “Quality Control”). For each lake, we calculated the mean and standard deviation of the intra-lake LSWT. Lake-wide temperature standard deviation was used to characterize the intra-lake heterogeneity of surface water temperature3. Note that it is impossible to provide within-lake temperature variations under a 4-km resolution. Therefore, for users who are interested in the within-lake temperature heterogeneity, we recommend using higher resolution LSWT data.
Four levels of LSWT are provided in this study, i.e., the lake-averaged raw data, daily, 8-day-averaged, and monthly-averaged data. There might be multiple observations in one day from different sensors. In our daily dataset, we used the top-quality afternoon data only. The “top-quality” was defined by Table 1, with one sensor at each time period, which was similar to the Pathfinder SST product39. The 8-day-averaged and monthly averaged data were calculated by averaging the daily LSWT.
Data Records
The dataset can be accessed at Figshare45.
Datasets are stored in three folders, which are named “metadata”, “daily”, and “binned”, and all the contents are listed in Online-Only Table 1.
The metadata of TP lakes were saved in the lake boundary shapefile. The lake boundary used to identify the lakes, along with lake ID, lake name in English, lake name in Chinese (in utf-8 format), longitude and latitude (both in decimal degrees) of the lake geometry center, perimeter of the lake polygon in kilometers, area of the lake’s water surface in square kilometers, and the name of the basin where the lake is located, were all saved in “lake_2002.shp” or “lake_2014.shp”. The boundary of the whole TP region, in ESRI shapefile format, was in the folder named “metadata”. Each NOAA/MetOp satellite was equipped with a unique AVHRR sensor. The names of the satellites and sensors were saved in the “AVHRRsensor.xlsx” file in the “metadata” folder. The LSWT data at a daily scale were saved in the “daily” folder. Data for each lake were deposited into a single document. The 8-day-averaged and monthly averaged LSWT data were saved in the “binned” folder. No data were filled by −999 in this dataset.
Technical Validation
Quality control
We excluded low quality pixels by several quality tests. We tagged AVHRR data with large uncertainties using a quality control (QC) label.
-
a.
Zenith angle test. Observations with VZA > 45° were included in the raw daily LSWT data but were excluded during computing of the daily, 8-day, and monthly averages. Temperature derived from a large view zenith angle (VZA) usually led to a larger error than at nadir as a result of the nonlinear directional thermal emissivity characteristics46 and the increasing uncertainty for a long atmospheric path41.
-
b.
Temperature range test. Values greater than 29 °C or less than −13 °C were excluded, and LSWTs less than 0 °C were tagged as low quality. The uncertainty of ice coverage might cause a systematic error of LSWT. The average and the difference in AVHRR band 4 (11 μm) emissivity and band 5 (12 μm) emissivity, usually known as ε and Δε, respectively, were highly correlated to the coefficients in the split-window algorithm temperature retrieval23,41,44,47,48. Coefficients of operational AVHRR SST were fitted for liquid water surface temperature retrieval.
-
c.
Brightness temperature test. A pixel was excluded if the difference between band 4 and band 5 derived brightness temperatures was negative (T4-T5 < 0). The SST algorithms were not likely to yield good retrievals under this condition.
The standard deviation of LSWT for each lake was calculated. Different from LSWT data24 derived from MODIS level 3 data, the spatial binning of AVHRR-derived LSWT data was done before temporal binning. Hence, for the proposed dataset, the standard deviation test (homogeneity test) was only an informational test since a heterogeneous LSWT distribution was quite a common situation for large lakes under the effect of land49.
Comparisons with other remote sensing datasets and the in situ data
The ARC-Lake dataset (version 3)20 is a lake surface temperature dataset derived from the Along Track Scanning Radiometer (ATSR2/AATSR). ATSR2 and AATSR were bidirectional thermal infrared radiometers on board the European Space Agency European Remote Sensing 2 Satellite (ERS-2) and the Environmental Satellite (Envisat), respectively. In the TP (of ARC-Lake), there are 10 lakes labelled as “TS2” temporal coverage (“TS2”: 1995–2012 data available) and 89 lakes labelled as “TS1” (“TS1”: 2002–2012 data available), with LSWT < 0 °C tagged as “frozen” and filled by the value 0 °C. As shown in Fig. 4, we compared ARC-Lake data and our AVHRR LSWT data for the 10 “TS2” lakes in the TP region (with LSWT < 0 °C excluded). We separately compared the LSWT derived from each NOAA sensor with ARC-Lake using overlap observations, with bias, correlation coefficients (r) and root mean square error (RMSE) calculated. The best results were from NOAA-19 (r = 0.96 and RMSE = 1.4 °C), and the worst were from NOAA-14 (r = 0.9 and RMSE = 2.6 °C). Obviously, it can be concluded that the AVHRR/3 sensors (NOAA-15 and later sensors) agree better with ATSR sensors than AVHRR/2 sensors (NOAA-14 and earlier sensors). The bias between different AVHRR sensors cannot be ignored when considering temperature variations over a long period.

Comparisons between different AVHRR sensors and ARC-Lake. Negative values were excluded in the comparison (in the ARC-Lake dataset, LSWT < 0 °C were tagged as “frozen” and have values of 0 °C).
To further validate the LSWT dataset proposed in this study, we compared this dataset with the previous MODIS-based LSWT dataset24. As shown in Fig. 5, the comparison of the 12 largest lakes (>500 km2 each) showed biases (AVHRR minus MODIS) of −1.5 ± 1 °C and RMSE from 1.4~2.3 °C. The two datasets are highly correlated (r≥0.92), and AVHRR-based data are systematically lower than MODIS-based data. The absolute differences were lower under warmer or colder conditions, and the differences were relatively consistent from year to year but were impacted by seasonal factors (day of the year) as indicated in Fig. 6. There was an ~3-hour gap between MODIS and AVHRR data acquisition. The diurnal cycles during the daytime vary with season and are affected by wind speed. According to previous research, the LSWT varies more than 0.5 °C/h during the warmer season49. Therefore, we believe that the varying differences were dominated by the diurnal temperature cycles. As illustrated in Fig. 7, the LSWT bias (AVHRR minus MODIS) shows no correlation with the lake area, area/perimeter ratio, latitude, or longitude.

Comparison of AVHRR-based (this study) and MODIS-based 8-day-average LSWT, with correlation coefficients (r), RMSE, and bias (AVHRR versus MODIS) illustrated.

Interannual and seasonal variation of LSWT differences (AVHRR minus MODIS). (a) The LSWT differences show a certain correlation with the day of year. (b) There is no correlation between the LSWT differences and different years.

Correlations between the LSWT bias (AVHRR minus MODIS) and the geographical/morphological metrics. The LSWT bias shows no correlation with (a) lake area, (b) the area/perimeter ratio, (c) central latitude of the lake, and (d) central longitude of the lake.
Due to the lack of field measurements in the TP region, validation with in situ data was limited temporally and spatially. As illustrated in Fig. 8, the AVHRR daily LSWT, along with MODIS 8-day-average LSWT data24 and the ARC-Lake data, were compared with the observed temperatures at Nam Co (30.78759°N, 90.97717°E, January 2012-July 2012)19, Ngoring Lake (35.038°N, 97.658°E, July 2011-September 2011)50, and Qinghai Lake (36.58778°N, 100.4921°E, January 2010-December 2013). The data for Nam Co were measured at 10:30, and the data for Ngoring Lake were measured at 9:00, both at local solar time. The temperature of Nam Co was measured at 10 cm below the water surface. The temperature of Ngoring Lake was measured at 20 cm below the water surface in July 2011 and at 50 cm below the water surface thereafter. The in situ temperature of Qinghai Lake was measured at 20 cm below the water surface.

Comparisons of AVHRR daily LSWT (this study), MODIS (Terra) 8-day-average LSWT, ARC-Lake, and the in situ measurements. (a) Nam Co (30.78759°N, 90.97717°E), (b) Ngoring Lake (35.0244°N, 97.6497°E)50, (c) Qinghai Lake (36.58778°N, 100.4921°E). Locations of the in situ data acquisition are marked on the map.
Overall, we found that the AVHRR LSWT was generally lower than the MODIS LSWT from May to July (Fig. 8a) while slightly higher than the MODIS from July to October (Fig. 8b). This is consistent with what is seen in Figs 5 and 6 in which the AVHRR LSWT is overall lower than the MODIS LSWT. Figure 8(c) shows the comparisons for Qinghai Lake, which has the longest temporal coverage. Note that AVHRR (RMSE = 1.7 °C), MODIS (RMSE = 1.7 °C), and ARC-Lake (RMSE = 2.0 °C) have similar accuracies.
Figure 9 further shows the inter comparison among AVHRR sensors, ARC-Lake (all “TS2” lakes) and in situ LSWTs (Qinghai Lake only). Negative values were excluded in the comparison. The correlation coefficient matrix in Fig. 9 shows that NOAA-19 has the best agreement with other sensors, while those earlier sensors show a relatively lower correlation, drawing the same conclusion as that in Fig. 4. In conclusion, the data cannot be applicable for climate change studies without ensuring that the calibration of the TP LSWTs from successive satellites is consistent, using overlap periods of the satellites.

Correlation coefficient matrix among different AVHRR sensors, ARC-Lake (all “TS2” lakes) and in situ LSWTs (Qinghai Lake only). Negative values were excluded in the comparison.
References
Messager, M. L., Lehner, B., Grill, G., Nedeva, I. & Schmitt, O. Estimating the volume and age of water stored in global lakes using a geo-statistical approach. Nature Communications 7, 13603 (2016).
Carpenter, S. R., Stanley, E. H. & Zanden, M. J. V. State of the World’s Freshwater Ecosystems: Physical, Chemical, and Biological Changes. Annual Review of Environment and Resources 36, 75–99 (2011).
Woolway, R. I. & Merchant, C. J. Intralake Heterogeneity of Thermal Responses to Climate Change: A Study of Large Northern Hemisphere Lakes. Journal of Geophysical Research: Atmospheres 123, 3087–3098 (2018).
Hanrahan, J. L., Kravtsov, S. V. & Roebber, P. J. Connecting past and present climate variability to the water levels of Lakes Michigan and Huron. Geophysical Research Letters 37, 89–100 (2010).
Schmidt, M. W. & Lynch-Stieglitz, J. Florida Straits deglacial temperature and salinity change: Implications for tropical hydrologic cycle variability during the Younger Dryas. Paleoceanography 26, PA4205 (2011).
Williamson, C. E., Saros, J. E. & Schindler, D. W. Sentinels of change. Science 323, 887–888 (2009).
Pekel, J. F., Cottam, A., Gorelick, N. & Belward, A. S. High-resolution mapping of global surface water and its long-term changes. Nature 540, 418–422 (2016).
O’Reilly, C. M. et al. Rapid and highly variable warming of lake surface waters around the globe. Geophysical Research Letters 42, 10773–10781 (2015).
Wan, W. et al. Lake surface water temperature change over the Tibetan Plateau from 2001–2015: A sensitive indicator of the warming climate. Geophysical Research Letters 45, 11177–11186 (2018).
Schneider, P. & Hook, S. J. Space observations of inland water bodies show rapid surface warming since 1985. Geophysical Research Letters 37, 208–217 (2010).
Yao, T. et al. Different glacier status with atmospheric circulations in Tibetan Plateau and surroundings. Nature Climate Change 2, 663–667 (2012).
Zhang, G., Yao, T., Xie, H., Zhang, K. & Zhu, F. Lakes’ state and abundance across the Tibetan Plateau. Science Bulletin 59, 3010–3021 (2014).
Zhang, G. et al. Lake volume and groundwater storage variations in Tibetan Plateau’s endorheic basin. Geophysical Research Letters 44, 5550–5560 (2017).
Austin, J. A. & Colman, S. M. Lake Superior summer water temperatures are increasing more rapidly than regional air temperatures: A positive ice-albedo feedback. Geophysical Research Letters 34, 125–141 (2007).
Ma, Z. et al. A spatial data mining algorithm for downscaling TMPA 3B43 V7 data over the Qinghai–Tibet Plateau with the effects of systematic anomalies removed. Remote Sensing of Environment 200, 378–395 (2017).
Zhang, S. Y., Li, X. Y., Zhao, G. Q. & Huang, Y. M. Surface energy fluxes and controls of evapotranspiration in three alpine ecosystems of Qinghai Lake watershed, NE Qinghai‐Tibet Plateau. Ecohydrology 9, 267–279 (2016).
Liu, J., Kang, S., Gong, T. & Lu, A. Growth of a high-elevation large inland lake, associated with climate change and permafrost degradation in Tibet. Hydrology and Earth System Sciences Discussions 14, 481–489 (2010).
Ye, Q., Yao, T. & Naruse, R. Glacier and lake variations in the Mapam Yumco basin, western Himalaya of the Tibetan Plateau, from 1974 to 2003 using remote-sensing and GIS technologies. Journal of Glaciology 54, 933–935 (2008).
Zhang, G. et al. Estimating surface temperature changes of lakes in the Tibetan Plateau using MODIS LST data. Journal of Geophysical Research: Atmospheres 119, 8552–8567 (2014).
MacCallum, S. N. & Merchant, C. J. Surface water temperature observations of large lakes by optimal estimation. Canadian Journal of Remote Sensing 38, 25–45 (2012).
Sharma, S. et al. A global database of lake surface temperatures collected by in situ and satellite methods from 1985-2009. Scientific Data 2, 150008 (2015).
Woolway, R. I. & Merchant, C. J. Amplified surface temperature response of cold, deep lakes to inter-annual air temperature variability. Scientific Reports 7, 4130 (2017).
Riffler, M., Lieberherr, G. & Wunderle, S. Lake surface water temperatures of European Alpine lakes (1989–2013) based on the Advanced Very High Resolution Radiometer (AVHRR) 1 km data set. Earth System Science. Data 7, 1–17 (2015).
Wan, W. et al. A comprehensive data set of lake surface water temperature over the Tibetan Plateau derived from MODIS LST products 2001–2015. Scientific Data 4, 170095 (2017).
Goodrum, G., Kidwell, K. B., Winston, W. & Aleman, R. NOAA KLM user’s guide. (NOAA, NOAANESDIS/NCDC, 1999).
Kidwell, K. B. The NOAA Polar Orbiter Data (POD) User’s Guide. (NOAA, NOAANESDIS/NCDC, 1998).
Sullivan, J. New radiance-based method for AVHRR thermal channel nonlinearity corrections. International Journal of Remote Sensing 20, 3493–3501 (1999).
Nagaraja Rao, C. R. & Chen, J. Inter-satellite calibration linkages for the visible and near-infared channels of the Advanced Very High Resolution Radiometer on the NOAA-7, -9, and -11 spacecraft. International Journal of Remote Sensing 16, 1931–1942 (1995).
Klein, I. et al. Evaluation of seasonal water body extents in Central Asia over the past 27 years derived from medium-resolution remote sensing data. International Journal of Applied Earth Observation and Geoinformation 26, 335–349 (2014).
Fichtelmann, B. & Borg, E. In Computational Science and Its Applications – ICCSA 2012 7335, 457–470 (Springer Berlin Heidelberg, 2012).
Simpson, J. J. & Gobat, J. I. Improved cloud detection for daytime AVHRR scenes over land. Remote Sensing of Environment 55, 21–49 (1996).
Stowe, L. L. et al. Global distribution of cloud cover derived from NOAA/AVHRR operational satellite data. Advances in Space Research 11, 51–54 (1991).
Khlopenkov, K. V., Trishchenko, A. P. & Luo, Y. Achieving Subpixel Georeferencing Accuracy in the Canadian AVHRR Processing System. IEEE Transactions on Geoscience and Remote Sensing 48, 2150–2161 (2010).
Emery, W. J., Brown, J. & Nowak, Z. P. AVHRR image navigation - Summary and review. Photogrammetric Engineering & Remote Sensing 55, 1175–1183 (1989).
Zhu, S. et al.An Efficient and Effective Approach for Georeferencing AVHRR and GaoFen-1 Imageries Using Inland Water Bodies. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 11, 2491–2500 (2018).
Wan, W. et al. A lake data set for the Tibetan Plateau from the 1960s, 2005, and 2014. Scientific Data 3, 160039 (2016).
Song, C., Huang, B., Richards, K., Ke, L. & Hien Phan, V. Accelerated lake expansion on the Tibetan Plateau in the 2000s: Induced by glacial melting or other processes? Water Resources Research 50, 3170–3186 (2014).
Fischler, M. A. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Readings in Computer Vision 24, 726–740 (1987).
Casey, K. S., Brandon, T. B., Cornillon, P. & Evans, R. In Oceanography from space 273–287 (Springer, 2010).
Mcmillin, L. M. Estimation of sea surface temperatures from two infrared window measurements with different absorption. Journal of Geophysical Research 80, 5113–5117 (1975).
Li, Z.-L. et al. Satellite-derived land surface temperature: Current status and perspectives. Remote Sensing of Environment 131, 14–37 (2013).
McClain, E. P., Pichel, W. G. & Walton, C. C. Comparative performance of AVHRR-based multichannel sea surface temperatures. Journal of Geophysical Research: Oceans 90, 11587–11601 (1985).
Ignatov, A. et al. AVHRR GAC SST Reanalysis Version 1 (RAN1). Remote Sensing 8, 315 (2016).
Hulley, G. C., Hook, S. J. & Schneider, P. Optimized split-window coefficients for deriving surface temperatures from inland water bodies. Remote Sensing of Environment 115, 3758–3769 (2011).
Liu, B. et al. A long-term data set of lake surface water temperature over the Tibetan Plateau derived from AVHRR 1981–2015. figshare. https://doi.org/10.6084/m9.figshare.6221180 (2018).
Rees, W. G. & James, S. P. Angular variation of the infrared emissivity of ice and water surfaces. International Journal of Remote Sensing 13, 2873–2886 (1992).
Li, X., Pichel, W., Clemente-Colón, P., Krasnopolsky, V. & Sapper, J. Validation of coastal sea and lake surface temperature measurements derived from NOAA/AVHRR data. International Journal of Remote Sensing 22, 1285–1303 (2001).
Vidal, A. Atmospheric and emissivity correction of land surface temperature measured from satellite using ground measurements or satellite data. International Journal of Remote Sensing 12, 2449–2460 (1991).
Pareeth, S., Salmaso, N., Adrian, R. & Neteler, M. Homogenised daily lake surface water temperature data generated from multiple satellite sensors: A long-term case study of a large sub-Alpine lake. Scientific Reports 6, 31251 (2016).
Wen, L., Lv, S., Li, Z., Zhao, L. & Nagabhatla, N. Impacts of the Two Biggest Lakes on Local Temperature and Precipitation in the Yellow River Source Region of the Tibetan Plateau. Advances in Meteorology 2015, 248031 (2015).
Zhang, G., Yao, T., Xie, H., Kang, S. & Lei, Y. Increased mass over the Tibetan Plateau: From lakes or glaciers? Geophysical Research Letters 40, 2125–2130 (2013).
Reuter, H. I., Nelson, A. & Jarvis, A. An Evaluation of Void-Filling Interpolation Methods for SRTM Data. International Journal of Geographical Information Science 21, 983–1008 (2007).
Acknowledgements
This study was jointly supported by the National Natural Science Foundation of China (NSFC) project (Grant No. 91437214) and China-USA CERC (Grant No. 2016YFE0102400). The in situ data for Ngoring Lake were collected through the NSFC projects (Grant No. 91637107 and No. 41475011). We gratefully thank NOAA for providing AVHRR GAC data. We also acknowledge the ESA and University of Reading for processing and distributing the ARC-Lake data.
Author information
Authors and Affiliations
Contributions
B.L., W.W., Y.H., and H.X. designed the study. B.L. wrote the paper. H.X., H.L., and W.W. contributed to the LSWT data processing. H.X., Y.H., W.W. and H.L. reviewed the paper and contributed to the data analysis. S.Z., L.W., G.Z., and Z.H. helped examine the validation data and improve the dataset.
Corresponding authors
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Online-only Table
ISA-Tab metadata file
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
The Creative Commons Public Domain Dedication waiver http://creativecommons.org/publicdomain/zero/1.0/ applies to the metadata files associated with this article.
About this article

Cite this article
Liu, B., Wan, W., Xie, H. et al. A long-term dataset of lake surface water temperature over the Tibetan Plateau derived from AVHRR 1981–2015. Sci Data 6, 48 (2019). https://doi.org/10.1038/s41597-019-0040-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-019-0040-7
- Springer Nature Limited
This article is cited by
-
Mapping the terraces on the Loess Plateau based on a deep learning-based model at 1.89 m resolution
Scientific Data (2023)
-
Factors controlling the oxygen isotopic composition of lacustrine authigenic carbonates in Western China: implications for paleoclimate reconstructions
Scientific Reports (2020)