
Abstract
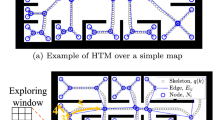
In this paper, the off-line path planner module of a smart wheelchair aided navigation system is described. Environmental information is structured into a hierarchical graph (H-graph) and used either by the user interface or the path planner module. This information structure facilitates efficient path search and easier information access and retrieval. Special path planning issues like planning between floors of a building (vertical path planning) are also viewed. The H-graph proposed is modelled by a tree. The hierarchy of abstractions contained in the tree has several levels of detail. Each abstraction level is a graph whose nodes can represent other graphs in a deeper level of the hierarchy. Path planning is performed using a path skeleton which is built from the deepest abstraction levels of the hierarchy to the most upper levels and completed in the last step of the algorithm. In order not to lose accuracy in the path skeleton generation and speed up the search, a set of optimal subpaths are previously stored in some nodes of the H-graph (path costs are partially materialized). Finally, some experimental results are showed and compared to traditional heuristic search algorithms used in robot path planning.
Similar content being viewed by others

References
Abascal, J., Cagigas, D., Garay, N., and Gardeazabal, L.: Interfacing users with severe mobility restrictions with a semi-automatically guided wheelchair, SIGCAPH (ACM Press) 63 (1999), 16-20.
Abascal, J., Cagigas, D., Garay, N., and Gardeazabal, L.: Mobile interface for a smart wheelchair, in: 4th Internat. Symposium on Human Computer Interaction with Mobile Devices, Mobile HCI 2002, Pisa, Italy, 18-20 September 2002, pp. 373-377.
Conte, G. and Zulli, R.: Hierarchical path planning in a multi-robot environment with a simple navigation function, IEEE Trans. Systems Man Cybernet. 25(4) (1995), 651-654.
Fernandez, J. A. and Gonzalez, J.: Hierarchical graph search for mobile robot path planning, in: Internat. Conf. on Robotics and Automation, Leuven, Belgium, 1998.
Fernandez, J. A. and Gonzalez, J.: Multi-Hierarchical Representation of Large-Scale Space, Kluwer Academic Publishers, Dordrecht, 2001.
Holte, R. C., Drummond, C., and Perez, M. B.: Searching with abstractions: A unifying framework and new high-performance algorithm, in: Proc. of the 10th Canadian Conf. on Artificial Intelligence, 1994, pp. 263-270.
Huang, Y.-W., Jing, N., and Rundensteiner, E. A.: Hierarchical optimization of optimal path finding for transportation applications, J. GeoInformatica 1(2) (1997), 125-159.
Kanoh, H., Kashiwazaki, A., Bui, L. T. H., Nishihara, S., and Kato, N.: Real-time route selection using genetic algorithms for car navigation systems, in: IEEE Internat. Conf. on Intelligent Vehicles, 1998.
Korf, R. E.: Planning as search: A quantitative approach, Artificial Intelligence 1(33) (1987), 65-88.
Latombe, J.-C.: Robot Motion Planning, Kluwer Academic Publishers, Boston/Dordrecht/London, 1990.
Sasaki, T., Chimura, F., and Tokoro,M.: The trailblazer search with a hierarchical abstract map, in: Proc. of the 14th Internat. Joint Conf. on Artificial Intelligence, Montreal, Canada, 1995, pp. 259-265.
Sugihara, K. and Smith, J.: Genetic algorithms for adaptative planning of path and trajectory of a mobile robot in 2D terrains, IEICE Trans. Inform Systems E82-D(1) (1999).
Vicente Diaz, S., Amaya Rodriguez, C., Diaz del Rio, F., Civit Balcells, A., and Cagigas Muniz, D.: TetraNauta: An intelligent wheelchair for users with very severe mobility restrictions, in: Proc. of the 2002 IEEE Internat. Conf. on Control Applications, 2002, pp. 778-783.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Cagigas, D., Abascal, J. Hierarchical Path Search with Partial Materialization of Costs for a Smart Wheelchair. Journal of Intelligent and Robotic Systems 39, 409–431 (2004). https://doi.org/10.1023/B:JINT.0000026090.00222.40
Issue Date:
DOI: https://doi.org/10.1023/B:JINT.0000026090.00222.40