
Abstract
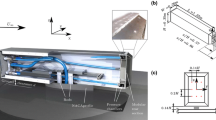
In order to study ornithopter flight and to improve a dynamic model of flapping propulsion, a series of tests are conducted on a flapping-wing blimp. The blimp is designed and constructed from mylar plastic and balsa wood as a test platform for aerodynamics and flight dynamics. The blimp, 2.3 meters long and 420 gram mass, is propelled by its flapping wings. Due to buoyancy the wings have no lift requirement so that the distinction between lift and propulsion can be analyzed in a flight platform at low flight speeds. The blimp is tested using a Vicon motion tracking system and various initial conditions are tested including accelerating flight from standstill, decelerating from an initial speed higher than its steady state, and from its steady-state speed but disturbed in pitch angle. Test results are used to estimate parameters in a coupled quasi-steady aerodynamics/Newtonian flight dynamics model. This model is then analyzed using Floquet theory to determine local dynamic modes and stability. It is concluded that the dynamic model adequately describes the vehicle’s nonlinear behavior near the steady-state velocity and that the vehicle’s linearized modes are akin to those of a fixed-wing aircraft.
Similar content being viewed by others


Abbreviations
- φ:
-
Instantaneous wing heaving angle
- Ch:
-
Amplitude of flapping oscillation
- Ct:
-
Amplitude of wing twist at the tip
- f:
-
Frequency of flapping
- t:
-
Time
- r:
-
Coordinate along span of a wing
- η:
-
Instantaneous wing twist
- φ 0 :
-
Phase of flapping oscillation
- φ η0 :
-
Phase of twisting oscillation
- Γ:
-
Circulation around the airfoil
- CL:
-
Translational lift coefficient
- CR:
-
Rotational lift coefficient
- c(r):
-
Local chord value
- u:
-
Local section velocity parallel to chord
- ν:
-
Local section velocity normal to chord
- Fν:
-
Viscous force
- ρ:
-
Air density
- CD(0):
-
Drag coefficient at zero angle of attack
- CD(π/2):
-
Drag coefficient at 90° angle of attack
- dFu:
-
Local force on the wing parallel to chord
- dFv:
-
Local force on the wing normal to chord
- mw:
-
Wing mass
- α:
-
Angle of attack
- R:
-
Wing length
- τ:
-
Airfoil moment
- U:
-
Vehicle forward velocity
- W:
-
Vehicle velocity normal to forward velocity
- Q:
-
Vehicle pitch rate
- θ:
-
Vehicle pitch angle
- g:
-
Gravitational constant
- FU:
-
Total aerodynamic force on vehicle in forward direction
- FW:
-
Total force on vehicle in downward normal to forward direction
- m:
-
Vehicle mass
- I y :
-
Moment of inertia about pitching axis
References
Moon F C. The Machines of Leonardo Da Vinci and Franz Reuleaux, Springer, Dordrecht, Netherlands, 2007, 255–262.
Ellington C P. The aerodynamics of hovering insect flight. I. the quasi-steady analysis. Philosophical Transactions of the Royal Society of London B, 1984, 305, 1–15.
Dickinson M H, Lehmann F O, Sane S P. Wing rotation and the aerodynamic basis of insect flight. Science, 1999, 284, 1954–1960.
Wang Z J. Dissecting insect flight. Annual Review of Fluid Mechanics, 2005, 37, 183–210.
Wang Z J. Dragonfly flight. Physics Today, 2008, 74–75.
Theodorsen T. General theory of aerodynamic instability and the mechanism of flutter. NACA Technical Report, 1935, 496.
Jones R T. The unsteady lift of a wing of finite aspect ratio. NACA Technical Report, 1940, 681.
DeLaurier J D. An aerodynamic model for flapping-wing flight. Aeronautical Journal, 1993, 97, 125–130.
Taylor G K, Bacic M, Bomphrey R J, Carruthers A C, Gillies J, Walker S M, Thomas A R L. New experimental approaches to the biology of flight control systems. Journal of Experimental Biology, 2008, 211, 258–266.
Zdunich P, Bilyk D, MacMaster M, Loewen D, Delaurier J, Kornbluh R, Low T, Stanford S, Holeman D. Development and testing of the mentor flapping-wing micro air vehicle. Journal of Aircraft, 2007, 44, 1701–1711.
Grauer J, Ulrich E, Hubbard J, Pines D, Humbert J S. Testing and system identification of an ornithopter in longitudinal flight. Journal of Aircraft, 2011, 48, 660–667.
Krashanitsa R, Silin D, Shkarayev S, Abate G. Flight dynamics of a flapping-wing air vehicle. International Journal of Micro Air Vehicles, 2009, 1, 35–49.
Dietl J M, Garcia E. Stability in ornithopter longitudinal flight dynamics. Journal of Guidance, Control, and Dynamics, 2008, 31, 1157–1162.
Berman G, Wang Z J. Energy-minimizing kinematics in hovering insect flight. Journal of Fluid Mechanics, 2007, 582, 153–168.
Bar-Shalom Y, Li X R, Kirubarajan T. Estimation with Applications to Tracking and Navigation, John Wiley and Sons Inc., New York, USA, 2001, 138–140.
Dietl J M, Garcia E. Ornithopter control with periodic infinite horizon controllers. Journal of Guidance, Control, and Dynamics, 2011, 34, 1412–1422.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Dietl, J., Herrmann, T., Reich, G. et al. Dynamic modeling, testing, and stability analysis of an ornithoptic blimp. J Bionic Eng 8, 375–386 (2011). https://doi.org/10.1016/S1672-6529(11)60043-7
Published:
Issue Date:
DOI: https://doi.org/10.1016/S1672-6529(11)60043-7