
Abstract
Indoor and underground space positioning and navigation systems are important infrastructure for urban lifeline construction. With the development of 5G communication technology, artificial intelligence, intelligent construction, and other technologies, autonomous mobile terminals have become the main application subjects, and the requirements for accuracy and ubiquity of indoor positioning technology are also increasing. Two main indoor positioning technologies, sensor based and RF signal based are introduced, basic concepts of new visible light communication positioning technology are discussed, and in-depth results on non-imaging and imaging positioning methods are presented in this article. We propose a pose-assisted imaging positioning method applied in the 11 m × 8 m × 3.5 m room, which is based on visible light communication. This test shows that this method can achieve the positioning results with a plane positioning error less than 5 cm and the height error less than 6 cm by using low-cost sensors. Visible light positioning technology provides a cost-effective and convenient new solution for indoor positioning, simultaneously solving the integration problem of communication and positioning. It can provide positioning technology supporting the construction of urban lifelines in enclosed spaces.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Urban construction, especially the construction and rapid development of urban lifelines, has posed serious challenges to the utilization of urban space. The development and construction of three-dimensional transportation, large venues, and underground spaces have become the main ways to alleviate the shortage of urban land. Navigation and positioning in open spaces can be achieved through Global Navigation Satellite System (GNSS), as receiving satellite navigation signals is not obstructed. The high-precision navigation and positioning of underground and other enclosed spaces is the main challenge faced by current urban construction. China's engineering construction has gone through the stages of digital construction and information construction, and is developing towards the stage of intelligent construction. Intelligent construction [1,2,3], with Building Information Modeling (BIM) as core, uses modern information technologies such as Artificial Intelligence (AI), Internet of Things (IoT), and virtual Reality (VR) to achieve an integrated collaborative support system driven by digital chain from project initiation planning, planning and design, construction (processing) to operation and maintenance services through standardized modeling, full factor awareness, networked sharing, visual cognition, high-performance computing, and intelligent decision support. Intelligent construction highly relies on information technology, communication technology, sensor technology, and other advanced digital technologies. The main technologies involved are: 1) virtual reality technology, 2) indoor/underground precise navigation and positioning technology, 3) artificial intelligence, 4) Internet of Things, 5) mobile Internet, 6) Big Data, etc. In this article, the main discussion is on indoor/underground (enclosed space) navigation and positioning technologies involved in supporting intelligent construction of urban lifelines [4].
In this article, traditional indoor positioning methods, namely sensor based indoor positioning technology and RF signal based indoor positioning technology are introduced, and authors propose a pose-assisted visible light communication imaging and positioning method, with a focus on introducing our team's latest research achievements.
2 Development of indoor positioning technology
With the introduction of the concept of Metaverse, the digital twin technology of mapping and interacting between real world and virtual world has become a hot research topic [5]. The demand for real-time, dynamic, and high-precision twin interaction has put forward higher requirements for indoor positioning. Multi-camera optical motion capture technology can meet the requirements of twin interaction in limited scenarios, but the system is relatively complex and requires specialized optical markers, making it difficult to widely apply. With the development of sensor technology and AI technology, new positioning technologies such as visual/inertial navigation fusion, simultaneous localization and mapping (SLAM) technology and optical communication visual pose integration not only meet the real-time and high-precision characteristics of twin interaction, but also the positioning scene layout is relatively simple and easy to be terminal, which has the prospect of widespread application. Current indoor positioning technology can be mainly divided into two modes: sensor based and Radio Frequency (RF) signal based, as well as new visible light communication positioning technologies.
2.1 Sensor based indoor positioning technology
Sensor based indoor positioning is a traditional positioning technology, which can achieve high-precision tracking of people and objects in indoor environment without GNSS signals. Installed sensors collect data and convert them into digital signals that can be processed by computers, providing indoor positioning information. The accuracy of this indoor positioning technology can reach centimeter level, but the installation, debugging, and calibration of sensors are relatively complex, and positioning range is limited [6].
-
(1)
Infrared positioning technology [7]: There are two specific implementation methods for infrared positioning. One is to attach an electronic tag that emits infrared radiation to positioning object, and measure distance or angle of signal source through multiple infrared sensors placed indoors, thereby calculating the position of object. Another method of infrared positioning is infrared weaving, which covers the space to be measured through multiple pairs of transmitters and receivers woven into an infrared network, directly locating moving targets.
-
(2)
Ultrasonic positioning technology [8]: Ultrasonic positioning technology is to place an ultrasonic generator on target being located, send ultrasonic pulses to surrounding area at a certain time interval, and receive pulse signals from ultrasonic emission devices at more than 3 fixed positions around. By comparing the time sequence of signals received by more than 3 receiving devices, the specific position of ultrasonic generator can be inferred, that is, the position of target being located. When target moves, the motion trajectory of target can be depicted through continuous measurement.
-
(3)
Inertial navigation positioning technology: Inertial navigation positioning is the use of inertial sensors such as accelerometer, gyroscope, or magnetometer to collect some parameter information of objects for measuring the acceleration and position information of the carrier itself, in order to achieve the purpose of navigation and positioning of moving carriers.
-
(4)
Visual positioning technology [9]: Computer vision is commonly used for robot positioning. Robots install cameras to capture surrounding environment, process and analyze relevant data based on captured images, and perform robot positioning.
-
(5)
SLAM technology: SLAM problem originated in the field of robots, and its research purpose is to realize the automatic work of robots in unknown environments [10]. In practical applications, the information of environment may not be comprehensive or unknown. In this case, it is necessary to combine positioning problem with mapping problem so that robot can use its own positioning to create a map, and at the same time, use its own created map to achieve precise positioning. That is, simultaneous positioning and map creation. According to the different sensors relied on, SLAM technology is generally divided into laser SLAM technology and visual SLAM technology.
2.2 Indoor positioning technology based on RF signals
Indoor positioning based on RF signals utilizes RF sensing networks to construct RF field models [11], RF signal measurement models, and positioning models. Usually, RFID tags, Bluetooth, WiFi, and wireless sensor networks are used to achieve localization.
-
(1)
WiFi positioning technology: WiFi positioning technology is based on and premise of the location information of network nodes (wireless access points), using a combination of empirical testing and signal propagation models to solve the position of connected mobile devices, with a positioning accuracy of 1 to 20 m.
-
(2)
Bluetooth and ZigBee positioning technology: Bluetooth positioning technology is based on the strength of measured signals for positioning. Currently, Bluetooth technology mostly uses fingerprint positioning methods, and most of its improved methods are also based on this method. The implementation of ZigBee indoor positioning is achieved through mutual coordination and communication between each blind node, based on the proximity detection method.
-
(3)
Cellular network positioning technology: cellular network positioning is mainly used for the positioning of smart phones, which is achieved by detecting characteristic parameters of propagation signals. The commonly used positioning methods are proximity detection method and based on the observation of pseudorange multilateration.
-
(4)
Radio frequency identification positioning technology: Radio frequency identification (RFID) is a technology that utilizes radio frequency signals to automatically identify objects and obtain relevant positioning information.
-
(5)
Ultra wide-band (UWB) positioning technology: this technology uses ultra wide-band (UWB) technology to measure the time difference of radio signal propagation between two different positioning base stations, so as to obtain the distance difference between positioning tag and positioning base station.
2.3 Visible light communication positioning (VLP) technology
Visible Light Positioning (VLP) is a new indoor positioning technology that can not only achieve positioning but also solve communication problems. Therefore, for intelligent construction, it can solve the integration problem of communication and positioning. It mainly utilizes the fast on/off response characteristics of LEDs to modulate and send information, and the receiving end receives optical signals through devices such as photodiodes (PDs). VLP technology is an application of low speed visible light communication (VLC) technology, which can be divided into VLV_PD method and imaging method according to the different types of sensors used to receive VLC signals at positioning terminal. PD method mainly utilizes PD to receive and analyze visible light signals and received signal strength (RSS) information, Based on the light intensity information, it performs ranging intersection or fingerprint matching to achieve position estimation of PD terminals, with positioning accuracy reaching sub-meter or even centimeter level. The imaging method is called VLP Imaging Sensor (VLP_IS) method for short. It mainly uses Complementary Metal–Oxide–Semiconductor Transistor (CMOS) sensors to image the VLP light source, uses the shutter effect of CMOS sensors to obtain the stripe image of VLP light source, and uses stripe image to obtain coordinate information corresponding to light source ID, and then uses photogrammetric principle to calculate the spatial coordinates of photography points relative to VLP light source to achieve indoor positioning [12].
2.4 Analysis of indoor positioning technology
With the development of artificial intelligence and 5G communication technology, the number of autonomous mobile terminals, such as indoor mobile robots and unmanned vehicles are gradually increasing, becoming the main application subjects, and the requirements for the accuracy and ubiquity of indoor positioning technology are also increasing. Traditional indoor positioning technology usually requires deployment of additional positioning devices, dedicated receiving equipments, dedicated processing centers, and professional personnel for maintenance, which has disadvantages such as high cost and poor universality. Although suitable for local application scenarios, it is difficult to scale the application.
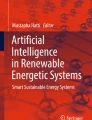
The indoor/underground structural environment is complex, and there are significant differences in the requirements for positioning accuracy, speed, and cost among different application scenarios. The distribution of system positioning accuracy and cost application fields of existing indoor positioning technologies is shown in Fig. 1. Infrared and ultrasonic positioning technologies have been applied to early indoor positioning technology research, but the system cost is relatively high. Indoor positioning technology based on wireless communication is often used for indoor personnel positioning, with relatively low positioning accuracy. However, indoor and mobile measurement usually require accuracy at the centimeter or even millimeter level, and wireless communication positioning is far from meeting this requirement. Based on the development of photogrammetry and machine vision technology, visual imaging has high positioning accuracy and good dynamic performance, but the measurement range is limited. In the field of high-end equipment manufacturing, such as the assembly and manufacturing of large products such as airplanes, ships, and rockets, there is a high demand for machining accuracy and a large site space. It is necessary to establish large-scale precision measurement and positioning technology. The indoor Global Positioning System (iGPS) and workspace Measuring and Positioning System (wMPS) measurement systems based on laser angle measurement technology have achieved indoor submillimeter-level positioning accuracy [13, 14]. With the development of 5G mobile communication technology, Indoor Atlas, based on intelligent mobile terminals, launched indoor positioning scheme of geomagnetic/WiFi/BLE/PDR multi-technological convergence [15], which has also been rapidly promoted commercially.

Distribution of cost-accuracy of different types of indoor positioning systems
3 VLP_ PD positioning method application
The non-imaging VLP method is mainly achieved by PD receiving and analyzing the characteristics of visible light communication signals. Its positioning speed is high, computational complexity is small, and positioning terminal is easy to integrate. However, synchronous signal modulation is required for light source sending end, which has certain requirements for the distribution of light source. The positioning methods can be divided into signal ID recognition method, light intensity RSS fingerprint analysis method, light intensity RSS geometric intersection method, TOA, AOA, and other methods.
3.1 LED_ ID identification method
PD based LED_ID recognition method, also known as the proximity method, as shown in Fig. 2, utilizes the limited illumination range of the LED communication light source as the positioning area, continuously broadcasting its own ID information. When the photosensitive diode (PD) in the positioning device receives and recognizes the ID information, it determines that it is within the positioning area of the light source. The positioning accuracy depends on the density of the light source, and it is necessary to consider the layout of the light source to avoid overlapping interference of adjacent light sources. PD based optical communication has strong reception ability, usually exceeding tens of Kbits/s, therefore LED_ The ID can be attached with some other information to meet the needs of location services.

LED_ ID identification and positioning
3.2 Ranging intersection method based on light receiving intensity RSS
When estimating the distance of positioning based on the received signal strength RSS using intensity modulation and direct detection techniques, a generalized Lambert model is usually used to establish the relationship between signal RSS and distance [16] as shown in Fig. 3. For the Line of Sight (LOS) channel, the channel DC gain between the VLP light source transmitter and the positioning receiver PD is shown in formula (1):

Light intensity signal receiving link
In the above equation, \({A}_{D}\) represents the effective photosensitive receiving area of the receiver PD; m0 is the luminous directivity mode parameter; \({d}_{L}\) is the distance between the LED and the receiver; \({\theta }_{T}\) and \({\varphi }_{R}\) respectively represent the radiation angle of the emitting light source and the incidence angle of the receiver PD; \({G}_{F}\left({\varphi }_{R}\right)\) is the gain of optical filtering in the link; The gain of light concentration \({G}_{C}\left({\varphi }_{R}\right)\) in the link is related to the angle of view of the detector \({\psi }_{FOV}\) and the refractive index of the material used in the device [16].
The distance relationship between RSS and VLP light sources can be established through (1), but the influence of light reflection and other noise interference is not considered, and these factors need to be considered in practical applications. The distance intersection positioning method based on light intensity RSS is shown in Fig. 4. Usually, four VLP light sources are used as positioning references. The positioning terminal receives the RSS signals of the four light sources at the same time and converts them into distances. The distance intersection equation system is formed by Eq. (2) to calculate the position of the positioning terminal P.

Spatial positioning based on light intensity ranging
3.3 Fingerprint localization based on light receiving intensity RSS
The fingerprint localization method is called by using the signal field formed by multiple VLP light sources in space as a positioning reference, where there is a difference in the signals of any two points in the signal space field to form a specific fingerprint, and then establishing a corresponding relationship between the specific fingerprint and the spatial position [17]. The positioning method based on RSS fingerprint is shown in Fig. 5. The four VLP light sources with different IDs are distributed in a rectangle, and the signal coverage forms an overlapping area. The signal reception can receive the ID signals of the four light sources and record the corresponding light intensity RSS signals. According to Eq. (3), the optical power calculation model is:

Principle of fingerprint localization
where \({P}_{T\left(i\right)}\) represents the emission power of the i-th light source; \({P}_{R\leftarrow T\left(i\right)}^{LOS}\) is the receive direct light power from the i-th light source for the receiver; \({H}_{R\leftarrow T\left(i\right)}^{LOS} \left(0\right)\) indicates the DC gain of the LOS channel between the receiver and the i-th light source; Then the fingerprint position can be represented as a vector \({P}_{j}= \left[{P}_{T\left(LED\_ID1\right)j}, {P}_{T\left(LED\_ID2\right)j}, {P}_{T\left(LED\_ID3\right)j}, {P}_{T\left(LED\_ID4\right)j}\right]\); By collecting the optical power RSS at a specific location in the space to construct a fingerprint spatial data model, and collecting signals in the positioning space for offline training to establish a fingerprint matching database, a fingerprint matching positioning system can be constructed.
3.4 Time arrival method based on optical signal
The optical signal time arrival method is divided into Time of Arrival (TOA) and Time Difference of Arrival (TDOA), where the TOA method measures propagation time of signal between transmitting and receiving ends, and then multiplies the signal propagation time by the signal propagation speed to obtain signal propagation distance, determining the distance between the transmitting and receiving terminals. Finally, the distance intersection positioning is performed by measuring the distance between receiving end and multiple transmitting ends [18]. Due to the visible light as the TOA communication carrier, there is a high requirement for time synchronization accuracy at both ends of transmitter and receiver, otherwise it is difficult to meet the measurement accuracy requirements. The VLP system based on TDOA does not require strict time synchronization at receiving and transmitting ends, but the signal modulation of different light sources at the transmitting end needs to be strictly synchronized [19]. As shown in Fig. 6, the TDOA system consists of four light sources with known spatial coordinates. The positioning terminal receives delay signals {T1, T2, T3, T4} from four VLP light sources within one cycle. The coordinates of the receiving terminal are set to P (× 0, y0, z0), and the distance between each light source in the system and the positioning terminal is calculated as Eq. (4). Then, according to the pseudorange multilateration, form an equation set, as shown in Eq. (5), where C is the speed of light, and solve the equation set to obtain the three-dimensional coordinates of point P.

Time-of -arrival ranging and rendezvous positioning
3.5 Optical signal angle arrival method
There are two ways to construct a VLP system of the optical signal angle arrival method. One is to use a circular PD array [20], which can determine the azimuth and elevation angles of light source relative to receiver when receiving LED signals. Therefore, the spatial position of the receiver relative to the light source can be calculated through angle intersection, as shown in Fig. 7a, which is the principle of planar angle of arrival (AOA). The circular PD array sensor forms its own coordinate system, and the center coordinates of three VLC positioning light sources are known to form the positioning system. Centers of three light sources are represented by A, B, and C, respectively. The receiver position is the O point. When only considering the plane coordinates, the plane angles formed by the receiver and the three light sources are ∠ 1, ∠ 2, and ∠ 3. Therefore, the plane position of the O point can be calculated through ∠ AOC and ∠ BOC, which is actually the angle resection method.

Schematic diagram of two AOA positioning modes. a Receiver based AOA localization. b Sender based AOA localization
Another method is to use an array light source system at the transmitter [13], as shown in Fig. 7b. The array light source signal can measure the azimuth angle of the receiver relative to the light source. When the receiver receives the relative angle signals from multiple light sources, it performs angle intersection to achieve positioning, which is essentially the angle-forward intersection method.
3.6 Application of VLP_PD method
LED_ID method has simple logic, convenient implementation, and a simple system. The positioning accuracy depends on the layout density of light source. It is one of the first commercially available visible light positioning methods, mainly used for positioning and guiding cultural and museum exhibitions, but the positioning accuracy is low. The positioning system based on time arrival method has high requirements for time synchronization, high system complexity and cost, and is difficult to promote and apply. The multi PD sensor scheme based on angle attainment has strong positioning adaptability, but has high requirements for both sending and receiving ends of light source positioning information, and is still in research stage. The method based on optical RSS distance measurement has high requirements for the accuracy of PD optical power measurement, and needs to establish an offline calibration relationship. The positioning system is vulnerable to background light interference and has poor portability, but it is suitable for specific enclosed environments, such as the positioning of subway trains in tunnel environments, the patrol inspection of high-voltage power lines in power plants, and the positioning guidance of unmanned supermarkets. In response to the problems in the engineering application of PD method, research directions mainly include optical signal noise analysis and filtering, ambient light suppression [21], IMU assisted calculation of PD tilt angle, deep learning method for noise suppression, integrated navigation, and the development of new single base station positioning light sources.
4 VLP_IS positioning methods applications
VLP_IS method includes two stages: light source imaging recognition and measurement positioning. In the imaging recognition stage, the imaging sensor shutter effect is mainly used to obtain the stripe image of VLP light source imaging, and the light source ID is obtained by analyzing stripe features of light source. The imaging positioning stage is divided into two methods based on the number of reference light sources for positioning: single-light positioning and multi-light source positioning.
4.1 Light source recognition method of VLP_ IS
VLP_IS system generally uses CMOS imaging sensors as the receiving end, the LED_ID information to be modulated by the sending end is continuously broadcasted in a flashing manner, and CMOS imaging sensor images VLP light source through working mechanism of roller shutter [22]. The roller shutter exposes VLP light source from top to bottom row by row and perceives the brightness and flicker of VLP light source to obtain a grayscale stripe image. As shown in Fig. 8a, for the imaging effect of different shapes of light sources, during imaging recognition stage, digital image processing methods are mainly used to extract the image area, geometric feature points, and light and dark stripe information of VLP light source, as shown in Fig. 8b. Then, light source stripe is decoded to obtain the LED of the light source ID information and its corresponding light source coordinate information provide coordinate reference for imaging positioning.

VLP light source imaging recognition and geometric feature extraction. a Imaging effect diagram of circles and rectangles VLP light source. b Geometric feature point extraction of circles and rectangles VLP light source
4.2 Single light source method of VLP_ IS
The distribution distance of light sources in indoor areas, such as building corridors, is relatively far, making it difficult to cover more than three VLP light sources in the imaging area. When there is only one circular VLP light source in the imaging field of view, theoretically only one positioning reference can be provided, and directional reference cannot be provided. For a single small-sized circular VLP system, reference [23] proposes an imaging and positioning method based on binocular vision and IMU assistance, as shown in Fig. 9a. The binocular vision sensor and IMU attitude sensor are integrated into an imaging and positioning module, and the spatial distance L from the point O of the module to the center P of VLP light source is measured in binocular vision coordinate system. At the same time, the spatial attitude angle of the IMU is recorded, and OP is converted into a spatial vector in world coordinate system to obtain the world coordinates of point O and achieve positioning. When using a rectangular light source as a positioning reference, imaging positioning can be directly achieved using four vertices of the rectangular light source, but it is necessary to be able to determine the corresponding relationship between image points of rectangular vertices and their spatial coordinates on the image. Reference [24] sets reference marks on the light source as shown in Fig. 9b, solving the correspondence between four image points of light source and their world coordinate points, and achieving imaging positioning based on a rectangular light source.

Principle of single light source imaging and positioning. a Binocular visual positioning based on circular light source. b Imaging positioning based on rectangular light source
4.3 Multiple light source method of VLP_ IS
The VLP system based on multiple light sources imaging is shown in Fig. 10a, which generally uses four or more smaller circular light sources. It is required that the imaging range of positioning terminal cover at least three or more light sources to meet the needs of spatial resection imaging pose calculation. After positioning terminal camera images with multiple VLP light sources, as shown in flowchart 10 (b), first extract each VLP light source area image separately, calculate the center coordinates of each VLP light source image, and analyze the light and dark stripe information to obtain the light source LED_ID and corresponding spatial coordinates, and then calculate the camera pose based on the imaging geometric relationship to obtain positioning result. The center image point of light source image is generally taken as the centroid or center of gravity of light spot contour, LED_ID can be decoded based on the stripe image or recognized using rule matching methods, and finally, the imaging pose is calculated to output the positioning results.

Principle of Multiple Light Imaging and Positioning. a Source Imaging and Positioning. b Calculation Process of Multiple Light Source Imaging and Positioning
The geometric relationship of imaging is as follows (6):
Among them, \({Z}_{C}\) represents the distance from the target point to photography center in camera coordinates, \({\left[\begin{array}{cc}u& v\end{array}\right]}^{T}\) represents the image point coordinates, \({f}_{x}, {f}_{y}, s, {u}_{0}, {v}_{0}\) represent the camera internal parameters, \({\mathbf{R}}_{3\mathrm{x}3}, {\mathbf{T}}_{3\mathrm{x}1}\) represent the rotation and translation relationship between camera coordinate system and world coordinate system, and \({\left[\begin{array}{ccc}{X}_{W}& {Y}_{W}& {Z}_{W}\end{array}\right]}^{T}\) represents world coordinate of the target point.
Different methods can be used for imaging pose estimation according to the number of light sources involved in calculation. When the number of light sources is 3, single image space resection, pyramid method and other methods can be used for calculation. When the number of light sources is more than 3, EPNP and Quaternion methods can be used for calculation. The positioning accuracy of VLP systems based on imaging is related to factors such as imaging distance, imaging resolution, and light source distribution. The position estimation error is generally on the order of centimeters, and the azimuth rotation angle estimation error can be less than 1 degree [25].
4.4 IMU assisted VLP_ IS positioning application
The commonly used LED light sources indoors are mainly divided into small-sized circular lights and large-sized rectangular lights, with various layouts. Imaging and positioning schemes can be designed based on the shape, size, quantity, and spatial layout of light sources used in VLP systems. In order to improve the robustness of navigation, positioning terminal of imaging VLP system generally needs to add IMU attitude sensors to assist in imaging and improve positioning accuracy and efficiency. As shown in Fig. 11, when using a single rectangular light source as positioning reference, corner matching of the rectangular light source can be achieved using IMU assistance according to the process in Fig. 12, and high-precision positioning can be achieved based on imaging positioning algorithm.

Visual recognition and vertex extraction of rectangular VLP light source

IMU assisted corner matching process of rectangular light source
As shown in Fig. 13a, the positioning test environment based on a rectangular panel light source was established in the laboratory office environment, whose length, width and height were 11 × 8 × 3.5 m respectively. Nine rectangular flat panel LED light sources were installed on the top of the room, and the luminous size of the light source was 54.8 cm × 54.8 cm. In this environment, a total of 9 rectangular flat LED light sources are installed on the top of the room, and five of them were transformed into VLP light sources. The Trimble SX12 3D laser scanning robot was used as a measurement tool to collect the spatial point cloud information of the test scene and construct the global world coordinate system. The rectangular vertices and floor points of 9 light sources are measured in the world coordinate system, and each point is measured twice to ensure that the point measurement accuracy is better than 2 mm.

Communication Light Source Layout in the Test Scenario
The positioning module was placed at the positioning point for rotational positioning, as shown in Fig. 14a. Using the imaging positioning method of rectangular flat VLP light source based on attitude assistance, the trajectory of the rotating positioning plane is shown in Fig. 14b, the trajectory radius is less than 1.8 cm, and the positioning point height fluctuation range is less than 4.6 cm.

Single point rotation positioning analysis. a Positioning test method. b Rotating positioning trajectory
The positioning module was installed on a remote control car for a mobile positioning test, as shown in Fig. 15a. By controlling the car to move along the direction of the light source deployment, the position-assisted iterative method was used for mobile positioning test, and the positioning result is transmitted to the positioning display software in real time through the positioning device. In the process, the car passes under the set VLP light source in turn according to the established route, and the overall plane positioning trajectory is shown in Fig. 15b. The test shows that plane positioning deviation is less than 5 cm, and height deviation is less than 6 cm.

Moving and positioning plane trajectory between multiple light sources. a Mobile positioning trolley. b VLP_ IS positioning trajectory
The identification light source used in the positioning process is shown in Fig. 16. The matching method based on the autocorrelation sequence of imaging fringe is used for identification [25], and the automatic switching of positioning marks is ensured through visual recognition. When the number of light sources is greater than 2, joint adjustment calculations can be performed to improve positioning accuracy.

Matching effect of multiple light source recognition
5 Summary
With the rapid development of wireless communication technology, wireless indoor positioning technologies such as RFID, WiFi, Bluetooth, UWB, Zigbee, and RF base station have emerged one after another. The emergence of indoor augmented reality (AR) technology has promoted the development of high-precision indoor positioning technology. Optical tracking, infrared laser positioning, visual motion capture and other technologies meet the needs of high-precision and low latency positioning. However, these positioning technologies have a smaller spatial range and higher costs. With the development of MEMS sensing technology, the trend of modularization, miniaturization, integration, and low cost of sensors such as inertial devices, visual cameras, and LiDAR has become increasingly apparent, promoting the development of mobile robot technology. SLAM technology based on vision, laser, and inertial navigation is gradually moving towards scene applications, which has also promoted the progress of indoor autonomous positioning and navigation technology. In order to meet the indoor positioning needs of different precision and cost for intelligent manufacturing and smart city construction, multi-sensor fusion indoor positioning technology is the main development direction in the future. With the widespread application of LED light sources, indoor positioning technology based on visible light communication has attracted widespread attention in the industry, providing a cost-effective and convenient new solution for indoor positioning. We systematically analyzed the implementation methods of VLP_PD and VLP_IS, and proposed a pose-assisted VLP_IS method, which can provide key technical solutions for the large-scale deployment and application of indoor positioning systems based on visible light communication imaging, and meets the needs of low-cost, high-precision mobile positioning for indoor mobile robots. At the same time, it solves the integration problem of communication and positioning, and can enhance the support of enclosed space navigation and positioning technology for urban lifeline construction. The identification of light source ID can be achieved by VLP_IS method, but the capacity is limited and the performance of imaging sensor has certain requirements. The combination of PD method and IS method to realize multi-light source identification and imaging positioning is a potential research and application direction.
Availability of data and materials
The datasets generated during and/or analysed during the current study are available form the corresponding author on reasonable request.
References
Julin LI (2017) Key technologies and engineering applications of smart construction[M]. China Architecture & Building Press, Bei Jing
Georgiadou MC (2019) An overview of benefits and challenges of building information modelling (BIM) adoption in UK residential projects[J]. Constr Innov 19(3):298–320
Deng S, Zhang X, Shao Z et al (2018) An integrated urban stormwater model system supporting the whole life cycle of sponge city construction programs in China[J]. J Water Climate Change 10(2):298–312
Yassin A, Nasser Y, Awad M et al (2017) Recent advances in indoor localization: a survey on theoretical approaches and applications[J]. IEEE Commun Surv Tutor 19(2):1327–1346
Mortlock T, Muthirayan D, Yu SY et al (2022) Graph learning for cognitive digital twins in manufacturing systems[J]. IEEE Trans Emerg Topics Comput 12(1):10–16
Gao W, Hou C, Xu W et al (2019) Research progress and prospect of indoor navigation and positioning technology[J]. J Navig Positioning 7(01):10–17
Jiménez AR, Zampella F, Seco F (2014) Improving inertial Pedestrian Dead-Reckoning by detecting unmodified switched-on lamps in buildings[J]. Sensors 14(1):731–738
Dasarathy BV (2000) Multi-ultrasonic sensor fusion for autonomous mobile robots[J]. Proc SPIE Int Soc Opt Eng 4051:314–321
Rodrigues RT, Basiri M, Aguiar A et al (2018) Low-level active visual navigation: increasing robustness of vision-based localization using potential fields[J]. IEEE Robot Autom Lett 3(3):2079–2086
Li S, Li J, Tian B et al (2021) A laser SLAM method for unmanned vehicles in point cloud degenerated tunnel environments [J]. Acta Geodaetica et Cartographica Sinica 50(11):1487–1499
Luo Y, Law CL (2012) Indoor positioning using UWB-IR signals in the presence of dense multipath with path overlapping[J]. IEEE Trans Wireless Commun 11(10):3734–3743
Li G, Sun S, Wang L et al (2022) Research and application of indoor visible light communication positioning technology[J]. Acta Geodaetica et Cartographica Sinica 51(06):909–922
Kang H, Fan B, Li Z et al (2012) iGPS Measurement principle and precision analysis[J]. Bulletin Surveying Mapping 03:12–15
Zhao Z, Zhu J, Yang L (2016) Orientation parameters calibration of wMPS by using precise 3D coordinate control network[J]. Infrared Laser Eng 45(11):158–163
Chen G, Zhang Y, Wang Y et al (2015) Unscented Kalman Filter Algorithm for WiFi-PDR Integrated Indoor Positioning[J]. Acta Geodaetica et Cartographica Sinica 44(12):1314–1321
Jia L, Zhou X, Lv L et al (2021) Research on visible light communication location method based on optical signal intensity detection[J]. Laser J 42(05):97–101
Cao Y, Li X, Hu Y (2019) Visible light fingerprint-based high-accuracy indoor positioning method[J]. Laser Optoelectron Prog 56(16):16–21
Sun XQ, Duan JY, Zou YG et al (2015) Impact of multipath effects on theoretical accuracy of TOA-based indoor VLC positioning system[J]. Photonics Res 3(6):296–299
Do TH, Hwang J, Yoo M (2013) TDOA based indoor visible light positioning systems[C]//2013 Fifth International Conference on Ubiquitous and Future Networks. IEEE, Da Nang, pp 456–458
Lee S, Jung SY (2012) Location awareness using Angle-of-arrival based circular-PD-array for visible light communication[C]// Communications. IEEE
Erogluy YS, Guvency I, Palay N et al (2015) AOA-based localization and tracking in multi-element VLC systems[C]∥IEEE 16th Annual Wireless and Microwave Technology Conference (WAMICON). pp 1–5
Hua L, Zhuang Y, Li Y et al (2021) FusionVLP: the fusion of photodiode and camera for visible light positioning[J]. IEEE Trans Vehic Technol 10(3):7–15
Sun S, Li G, Feng Q, Wang L (2020) Indoor positioning based on visible light communication and binocular vision[J]. Optics Precis Eng 28(04):834–843
Sun S, Li G, Wang L, Feng Q (2021) High-precision visual indoor positioning method with the rectangular light source based on visible light communication[J]. J Geomat Sci Technol 38(03):259–266
Sun S, Li G, Gao Y et al (2022) Robust dynamic indoor visible light positioning method based on CMOS image sensor[J]. Photogramm Eng Remote Sensing 88(5):333–342
Acknowledgements
This research was support by the National Natural Science Foundation of china(41501491) and State Key Laboratory of Geo-Information Engineering(SKLGIE2020-Z-2-1) and Key Technologies Research and Development Program(2022YFB2602200).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design of the subject.Professor Gusangyun Li is the main researcher, Dr. Sun and Dr. Gao, organized experimental validation, and Ang LI and Kailin Zhu assisted in data collection and analysis.
Corresponding author
Ethics declarations
Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, G., Sun, S., Gao, Y. et al. Research and development of indoor positioning technology based on visible light communication. Urban Lifeline 1, 10 (2023). https://doi.org/10.1007/s44285-023-00011-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44285-023-00011-y