
Abstract
This article introduces introduces a new prefabricated and assembled steel structure system and its key construction technologies for repeated switching scenes in existing stadiums. This steel structure system follows the DfD design method, minimizing the volume of each group of structural member units and separating the connection interfaces between members. In order to improve the construction and assembly efficiency of all the structural components, this study establishes an assembly-oriented BIM model data system by adding customized attributes in the family library in Autodesk REVIT. By associating model attributes with on-site monitoring data of the construction process, this research realizes real-time acquisition and display of construction data of all components during the whole life cycle. At the same time, aiming at the requirements of high-precision positioning and digital dynamic monitoring in future on-site construction, this research proposes an innovative construction positioning monitoring method which combines motion capture system with traditional construction monitoring technology. By correcting the positioning data of motion capture system with traditional construction monitoring data, real-time dynamic monitoring of several monitoring points in a 12*15 m large site is realized and the measurement error is controlled within ±1 mm. This study takes the construction project of “ice-water conversion” from the main swimming pool of the National Swimming Center in the Summer Olympic Games to the curling venue of the Winter Olympic Games as an example to show the important role of relevant technology to improve the construction efficiency in the construction application for the renovation of existing Olympic venues.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Construction activities continue to consume resources and affect the natural environment in the process of its entire life cycle. In addition to the direct use of materials in construction and the resource consumption caused by construction activities, the wastes from the subsequent life cycle of building maintenance, renovation, and demolition have also become the content that needs to be focused on in current construction activities. According to statistics, in the current world production and consumption process, up to 40% of the waste generation comes from construction behavior (Layke et al., Layke et al., 2016), and worldwide, 20%–35% of negative environmental factors come from these wastes (Layke et al., Layke et al., 2016). With China’s current attention to environmental issues and the proposed goals of carbon peaking and carbon neutrality, how to establish a new adaptive building system from the perspective of the whole life cycle of construction, operation, maintenance and demolition, and how to explore more efficient and environmentally friendly green construction technology methods have also become a crucial issue that the current construction industry needs to pay attention to.
1.1 Design for Disassembly (DfD): the reconstruction of prefabricated buildings
The design and construction technology innovation of prefabricated buildings is an important frontier direction in the construction sector, and it has always been an important strategic direction to promote standardized components, construction details, as well as sustainable and intelligent construction technology. In the stages of building production and construction, prefabricated technology advocates the standardization and modularization of building components, shifting the manufacturing process of building components from the construction site to the prefabricated factory, and at the same time transforming the on-site construction process into a component-based assembly process. The assembly process greatly reduces the complexity of the on-site operations and the negative impact on the environment, optimizes the waste of resources in the component manufacturing process, and improves the safety rate and productivity in the manufacturing and installation of building components. However, from a broader life-cycle perspective, the operation, maintenance and demolition phases of a building after completion also have a greater impact on the environment. For example, in the United States in 2014, the annual total of construction and demolition waste reached 484 million tons, of which more than 90% were debris generated during the demolition process (EPA, EPA, 2015). Therefore, how to further effectively consider the full life cycle utilization and renewal operations of buildings has also become an urgent issue in the development of current prefabricated buildings.
In related fields, great efforts and attempts have been taken in the architecture field since World War II. With the exploration of prefabricated building technology in the early twentieth century, the Dutch architect N. John Habraken proposed the open building movement in the 1960s, which advocated flexible construction of individual participation; Architects represented by Japanese architect Kenzo Tange also put forward the theory of metabolism in the 1960s, and tried them in a large number of practical projects such as the Nakagin Capsule Tower by Kurokawa Kisho (Fig. 1) (Lin, Lin, 2011). The related ideas first mentioned that buildings should produce different responses to the changes of usage and social needs, and can be reapplied through replacement, thus laying the foundation for the ideas of deconstruct-able building design and the related construction technology. After 2000, prefabricated buildings and green building ideas began to be integrated. In the American Energy and Environmental Design Evaluation System (LEED-NC), “reducing the (environmental) impact of the whole life cycle of buildings” is listed as a separate scoring standard, and it stipulates “reuse of historic buildings”, “regeneration of abandoned buildings” and “Building Material Recycling” as bonus options for scoring.

Modular and detachable architectural design and construction method proposed in Nakagin Capsule Tower
Under the current background of “carbon peaking and carbon neutrality”, the adaptability of prefabricated structures and the high efficiency, energy saving and environmental protection of their construction process have also become the focus of a large number of recent researches. For the adaptability of buildings, researchers in the field of building industrialization have carried out a lot of practices, among which the DfD theory is currently more concerned and recognized by the most researchers (Guy and Ciarimboli, Guy & Ciarimboli, 2003; Rios et al., Rios et al., 2015). DfD (Design for Disassembly) refers to an architectural design idea based on sustainability and adaptability, emphasizing that at the beginning of the design, the building assembly system is realized through the standardized design, disassembly design and detail design of the components and their parts. This enables the final building system to be disassembled and installed repeatedly. Therefore, the disassembly of the whole life cycle is considered in the original design stage, which makes the components easy to disassemble, maximizes recycling, and effectively improves its green performance (Fig. 2).

Application of Circular Economy Principles in Construction Industry (Arup, 2021)
In the current DfD design theory, the main research issues focus on basic design topics such as the hierarchical order, interface division, and assembly detail design of prefabricated building components. However, attention to the construction technology during the actual dismantling and reconstruction process is still relatively rare. Currently, some studies have mentioned the requirement of considering human resource cost for the disassembly and demolition process of the basic building components (Navarro-Rubio et al., Navarro-Rubio et al., 2019a). For example, in the Dymaxion house of Buckminster Fuller, in order to consider the convenience of transportation and installation of components and materials during construction, aluminium was selected as the main material of the building and the house was divided into approximately 2000 parts to be mounted using screws and bolts, which would permit easy disassembly (Mrkonjic, Mrkonjic, 2007). At the same time, due to the complexity of component and their connections in such buildings, they are often more dependent on the complex work of on-site workers. Some studies have also mentioned the importance of the size of related components and the simplicity of construction details in related design researches (Abuzied et al., Abuzied et al., 2020). However, in most current practices based on relevant theories, there are often more problems and difficulties in the repeated disassembly and assembly of buildings, especially during the construction process, such as, how to reduce the loss and damage of building components during the transportation process, how to realize the in-situ positioning and assembly of different components, how to efficiently stack and organize construction components on site, and how to control the installation accuracy and overall accuracy of construction and installation. Therefore, systematic researches of structure systems and their building techniques are still required to be made.
1.2 Design for Reuse: post occupancy of Olympic venues
Most buildings, especially public buildings, will face the need of building renewal due to the transformation of functional requirements and the development of technology during their entire life cycle. Among them, the Olympic venues are a typical type of buildings with the need for reuse and functional change. Over the last couple of years our knowledge about the impact of mega-events such as the Olympic Games on cities and their inhabitants has increased exponentially. Currently, two of the most important topics in geographical researches about the Olympic Games are the mega-event’s influence on the host city’s urban development and, to a lesser extent, how the projects realized for the Olympic Games (primarily sports facilities, but also the Olympic Village, transportation routes and other infrastructure) can be reused after the Games (Alberts, Alberts, 2011).
Post occupancy and management of Olympic Venues is nowadays a common requirements for all the previous Olympic host cities. In general, the IOC (International Olympic Committee) stresses that expensive projects should have valuable uses after the Olympics are over to ensure “that the Olympic stamp on a city continues to be a positive one in the years after the event has been held” (Cashman, Cashman, 2009). Nevertheless, the event-driven property of the Olympic Venues and the technical and safety specifications demanded by the International Federations of the various sports mean that costs for such facilities will be high even without any unnecessary extravagances.
Reusing facilities built for the Olympic Games have been paid attention to and reported since 1968 for Grenoble (Kukawka, Kukawka, 1999). The problem was found that the renovation of special facilities frequently required ever more specialized facilities due to the changes in the sports itself (Essex and Chalkley, Essex & Chalkley, 2004). At the same time, attempts have been made to add new training facilities and research centers based on the existing Olympic Venues. Although this ensured the facilities’ continued use, it has also been criticized that huge investments were only made for a small group of elite athletes. In response to such problems, Olympic Game in Calgary and Salt Lake City took the reuse of Olympic Venues into consideration from the first planning of the Olympic areas. Recreation areas and public activities was designed for the Olympic Venues and the post-Games uses already stated in the bid document of buildings such as the Salt Lake City Ice Arena and the Winter Sports Park to become multipurpose recreational facilities. Since Vancouver’s Winter Olympic Games in 2010, sustainable post-Games uses of the Olympic buildings was planned in the concept, which included the use of many existing facilities “upgraded to meet or exceed International Federation standards.” (Alberts, Alberts, 2011) All of the buildings would be returned to their pre-Games uses as commercial sporting facilities and would continue to host, international competitions as well. However, since it is rare that the same city will host both summer and winter Olympic Games and that Olympic Games returns to a previous host city, frequent and multifunctional uses of Olympic Venues is only a remote possibility (Essex and Chalkley, Essex & Chalkley, 1998).
In 2022, the Beijing Winter Olympics has brought unique attempts and opportunities for the post-Games sustainable reuse of Olympic venues. Since Beijing hosted the Summer Olympics in 2008, in the organization and preparation of the Winter Olympics, the guiding ideology of “green Olympics” and sustainable development of existing Olympic venues, as well as sustainable reuse of existing Olympic venues and facilities in order to undertake new winter sports events, has also become a characteristic innovation direction of Beijing Winter Olympics strategy in the field of construction. The “Water Cube”, which was used as the venue for the Olympic diving and swimming competitions in 2008, also followed this opportunity and became the first Olympic venue in the world to achieve “water-ice conversion” and switch between swimming venues and indoor curling venues repeatedly. The water-ice conversion scheme of “Ice Cube” is completed with a discrete steel structure support system that can be disassembled and assembled repeatedly as well as a mobile ice-making system. It is different from the way of traditional curling competition venues, which are built on a permanent concrete floor, so it also brings the challenges of designing process and the construction methods for the prefabricated building system (Fig. 3). For example, curling has very strict requirements on the ice surface, light and air environment. Therefore, the ice surface after construction must be extremely flat. Within the range of nearly 50*25 m in the entire venue, the error of any two points cannot exceed 6 mm (±3 mm), and there must be a strong enough structure as a support to avoid structural vibration during the process. At the same time, since the venue is being used as a post-Olympic public swimming activity and training venue, the time period for the transformation and reconstruction of the structure also has a great impact on the daily operation of the entire venue. Based on these foundations, how to systematically design the structural system, component system, construction details and construction technology from the perspective of “reconstruction” has also become an important issue of this research.

Application of a DfD-based fast-built steel structure system in the ice-to-water conversion system for the Olympic curling Hall in the Chinese National Aquatics Centre(“Water-Cube”)
2 Digital design of the demount-able structure system
2.1 DfD-based design of the prefabricated structure
The disassembly of prefabricated buildings is the reverse operation of the connection of components. Therefore, a large number of studies related to demount-able design mainly focus on the design of the connection method of building components. Different from the demolition process of traditional buildings, the dismantling of reusable prefabricated buildings largely depends on the integrity and independence of the component connection interface. In the traditional building structure system and construction detail design, a large number of on-site wet operations and chemical connection methods also make it difficult to present a relatively clear component level and interface in the building, and construction often leads to an integrated structural system. Therefore, it is difficult to carry out secondary dismantling and rebuilding. Even in the field of steel structures with a high degree of prefabrication, traditional construction details and their reliance on such as welding, embedded reinforcement often bring about integration results that are difficult to disassemble.
In response to the problem of independent splitting, the detachable design system aims at rapid installation and non-destructive disassembly, and clearly puts forward the importance of dry operation details and construction technology in the design of structural systems. In addition to the building envelope components, the applicability of the dry operation connection technology in the structural components is also an important direction of the current detachable system design. In related types of construction details, mechanical connection methods such as hinged, pinned, threaded, and profiled connections can often provide strong interface independence and simple disassembly. Especially in the composite structural system composed of a variety of materials, such as the load-bearing structure of the steel structure overlying the concrete slab, due to the need for the integrity of the structure, on-site concrete pouring is often used in the traditional structural design and construction, where there is a strong dependence on construction methods such as reinforcement connection. In the new detachable system, the components become smaller and discrete due to the need for repeated disassembly, and their structural hierarchy is more complex. Multiple directions constrain the displacement degrees of freedom of the final structure, resulting in a stable and flexible disassembly of the final structure (Eckelman et al., Eckelman et al., 2018) (Fig. 4). Compared with traditional construction methods, studies have shown that in similar buildings, the environmental impact of demount-able buildings will be greatly reduced, and it will also bring significant advantages in terms of economy. When the prefabricated components are not removable, the on-site construction cost is about 10–30% higher than that of the traditional method, and when the removable components are used and reused, the construction cost of the prefabricated building is about 5–20% lower than that of the traditional building (Navarro-Rubio et al., Navarro-Rubio et al., 2019b).

Disassembly-Oriented Assembled Bolted Construction Node System
The ice-water conversion structure system in this study is mainly used in the main swimming pool of the “Water Cube” of the National Aquatics Center, Beijing. Under the functional requirements of curling sports of the winter Olympics, a temporary support structure is designed by filling the swimming pool to provide a temporary support structure for the upper platform, which should be stable and flat enough for the final finishing of the ice surface. Therefore, the overall structure adopts a prefabricated steel structure system with a total length of 56.7 m and a width of 26.7 m. In the related structural disassembly design, considering that it is difficult to operate large-scale construction and transportation machinery on the construction site, the final structure is further discretized so that the weight of each structural component is controlled within 500 kg. The structural frame is made of prefabricated steel columns and beams, covered with lightweight prefabricated concrete slabs for ice making. The structure is based on the beam-slab-column structural system, which is divided into structural columns, main beams, secondary beams, concrete slabs and other main components. Taking into account the stability of the structure and the quality constraints after the dismantling of the components, the basic structural grid size is controlled to be 2 m*3 m, and there are 6 concrete slabs corresponding to the upper part of each span (Fig. 5). Among the structural components, high-frequency welded thin-walled H-beams with thickened flange plates are used to reduce the possibility of deformation during disassembly and transportation. The construction details between the column, the main beam and the secondary beam is connected by M16 high-strength bolts. In order to facilitate the adjustment during the installation process, long straight holes with an adjustment range of about 2 cm are used for the bolts. The surface layer is made of lightweight 1 m*1 m*0.1 m concrete prefabricated panels, whose strength grade is L40.

Structural level dismantling design of the ice-water conversion system
Due to the particularity of the ice surface conditions in the curling competition venue and the limitation of ice making conditions, the bottom of all steel columns is provided with a coarse adjustment device that can be adjusted in height through bolts. The connection between the top secondary beam and the bottom of the concrete slab adopts a fine adjustment device that can also be adjusted in height, and it is also fix connected to the secondary beam and the concrete slab by bolts (Fig. 5). Finally, the structure can be disassembled into more than 2000 components, including a total of 1568 prefabricated panels and 140 t steel structure. Compared to traditional prefabricated structure systems, all the components are designed to be transportable by human labor and all the connection details are designed to be convenient for diassembly as well as on-site calibration.
2.2 Design of the demount-able construction detail and the disassembly sequence
In the design of the structure system, the demount-able detail design between the detachable components plays a decisive role in the repeated installation of the structure and determines the difficulty of the construction process. At the same time, the sequence of disassembly and assembly of components also play an important role in the overall workflow control and manual deployment of the whole construction process. Therefor, the overall structure is further split into layers according to the system of columns, beams and plates, and the two layers of auxiliary leveling devices for leveling, which determines the final disassembly sequence of the system.
First of all, the detachable structure is located on the spherical hinge bearing with a non-slip design that can be adjusted in height. Before the on-site assembly, the original swimming pool needs to be waterproofed and the cleaning work should be completed. After that, the spherical hinge support should be positioned and placed, and adjust the thread height to a uniform height; then, all steel columns can be placed on the spherical hinge support with the support from the worker for stability. Then, the horizontal and the oblique rod connection are connected onto each column span to form a self-stabilizing structure. The whole process can be completed by only 2–3 workers in a short time; after that, the workers can place the main beam and the secondary beam on the top interface of the column in turn. The top of the column and the main beam were connected bolt structures at four corners, and the secondary beam were also connected by the bolts to the main beams at the holes on the flange plate. At the same time, in order to ensure the tolerance of installation, the preset holes on each structural beam are long slotted holes, allowing a construction error of 1-2 cm. After the assembly of the columns and the main beams, the whole structure is roughly leveled and then the secondary beams as well as the fine leveling device are assembled onto the structure. Finally, the 1 m*1 m precast concrete slabs are mounted on the secondary beam according to the serial number and fixed at the the four corners of the concrete slab (Fig. 6). With the fine leveling device, the whole surface of the concrete slabs can be further leveled within centimeters.

Assembly Sequence of the prefabricated Structure
3 On-site assembly monitoring and analysis
3.1 BIM-based construction control system
The project had a high complexity of requirement that includes the status monitoring of each building component in the full construction cycle, the real-time dynamic monitoring of the high information of hundreds of plates, the high accurate calibration standard of leveling (±3 mm). Therefore, a complex framework and a powerful construction data analysis platform is needed. The structural design and the component design consider both the possibilities to maintain the integrity of the structure and to make the component small enough for transportation. And this also makes the final discrete building structure composed of thousands of different structural elements.
To solve the problem, the BIM platform is introduced from the designing stage of the structure system. Firstly, a component definition system and its related building information model is built in REVIT. For each component, a customized family is created with several special defined fields to trace its condition, such as the transportation stages, assembly stages as well as the leveling information. The tracing and monitoring of various components relies mainly on the sensors such as the RFID that gives the status information whether a component is on-site or still in transportation, the motion capture system that provide the height of each top plate as well as the QR Code information that the builders edited at any time (Fig. 7). To integrate every different kind of information together, Autodesk REVIT is selected as the main software platform. With the use of the “Rhino-inside-REVIT” technique, a computational data analysis approach could be achieved by using Grasshopper Platform inside REVIT (Fig. 8). By developing corresponding interfaces in the system, one can get all the information at the same time and interact within the same data system.

On-site monitoring system and its workflow

Customized BIM Families Information for the Structure System in AutoDesk REVIT
3.2 Motion capture system
Motion Capture (MoCap) System is innovative applied in this research to provide a precise positioning of multiple slabs at the same time. A MoCap System comprises markers, cameras, a server, and a computer as the data analyzer and exchanger. The infrared-reflective markers are attached to the target objects and the cameras can triangulate the location of the markers and record them with a high sampling rate. To obtain the 3D coordinates of a marker, at least 2 cameras must simultaneously track the positions of the target marker in the 2D images. At the same time, because the accuracy is decreased if the marker image in any camera(s) overlap or are closely positioned, a series of evenly distributed cameras are the common configuration in a MoCap system. All the cameras in a MoCap system must be synchronized to measure the dynamic motions of different individual markers. To achieve the synchronization, a server gets all the real-time 2D information of the cameras and send them to the computer. The software in the computer combines the 2D coordinates together and record all the history data for each marker.
To get the accurate 3D coordinate of the target markers, the real coordinates of the cameras should be calculated. Because there are often many cameras in one system, one simple static coordinate information of the markers is not enough. Therefore, a calibration procedure must be applied. The calibration uses a great amount of data, which is usually sampled by performing with a wand, as shown in Fig. 9. Because the wand provides the basic shape relationship and distances of the markers as a priori and the wand can be easily waved, the calibration method based on the wand can simplify the process and improve the calibration accuracy.
The calibration process can be divided into two processes: static and dynamic. Firstly, static calibration is performed to establish the absolute spatial reference of the coordinate system. In this process, the T-shape of the wand will be used. As shown in Fig. 9, the wand is placed around the target, and the markers appended on the wand form two perpendicular axes (xw, yw). These axes are used to define a 3D space coordinated system (xw, yw, zw). The relationship between the 2D image coordinates of the cameras (u, v) and the target 3D model coordinates (xw, yw, zw) is defined by the algorithm as follows:
where [C] is the perspective projection matrix from the camera space to the image space, which is also an intrinsic matrix that consists of the focal length fx and fy and the principal point coordinates px and py. [R| T] is the extrinsic matrix that shows the transformation from the wand space to the camera space. It contains the rotation matrix R and the translation vector T.

Principles of the calibration of a motion capture system
Three coordinate systems are used in the process to transform the 2D image coordinates to the 3D model coordinates. As shown in Fig. 1.4, the 2D image coordinates (hj, vj)i of the jth marker from the ith camera are the result of the perspective projection of the camera coordinates. The camera coordinates (xc, yc, zc)i are the 3D coordinates of the ith camera corresponding to the marker. The wand coordinates (xwj, ywj, zwj) are the virtual 3D coordinates of the jth marker relative to the location of the wand.
The camera matrix [C] and the extrinsic matrix [R| T] are optimized and finally determined via a dynamic calibration procedure, which is performed by waving the wand to record multiple coordinates data and to calculate the relative positions and directions of the camera. The accuracy of the reconstruction of the 3D coordinates is dependent on various factors such as the focal length, the lens distortion coefficients and the camera’s resolution. During the calibration, direct linear transformation and nonlinear transformation algorithms are frequently employed (Hinrichs and McLean, Hinrichs & McLean, 1995).
3.3 On-site monitoring of the components’ assembly information
In the construction process, the collection of information on structural components first comes from various sensing devices on site. In this research, the on-site information perception includes two systems: the component entry and exit information perception based on the Internet of Things and the real-time monitoring of component coordinates based on MoCap technology. For the entry and exit status of components, the radio frequency identification chip (RfID) with the function of positioning tags is used. The entry and exit status of components is monitored, and the status changes of each components are recorded into the overall BIM model in real time through the relevant data monitoring software interface. In the on-site construction organization, the entry and exit data is recorded and controlled in form of component stacking, and the components are stacked from top to bottom according to the order of on-site construction, so as to enable the in-situ installation of each structural components. At the same time, a material stacking area is set up on site. Once the material stacking enters the site stacking area, the chip will be automatically detected, the record will also be transmitted and stored in the system, and the attribute status of the corresponding component will be changed accordingly.
In addition to the state changes of components that can be directly perceived through the IoT technology, there is still a lot of installation information that needs to be manually performed and reported for maintenance, such as whether each component is installed, whether there is damage and so on. For all such component information, a unified management through an online construction information database is used in this research. The database records all construction states of each component in a unique label, and saves the time stamp of each record’s changes. In order to facilitate the convenience of on-site construction operations, the maintenance and editing functions of relevant data are completed in the form of WeChat (a mobile APP) application. On each component on the site, the relevant QR code stickers are arranged through the corresponding component name and position number. After each construction step is completed, the on-site construction manager can scan the code in batches to check and change the installation information of the components (Fig. 10). Other data related to RfID chip and the MoCap system can be maintained in real time through the software data interface of the BIM system.

QR code of each component and the WeChat interface for maintaining data
3.4 On-site positioning monitoring and leveling calibration
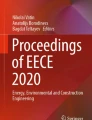
Due to the characteristics of the motion capture system in this research, when the MoCap cameras are unilateral arranged, the system positioning error increases as the distance between the target marker and the camera increases. At the same time, due to the method of the establishment of the coordinate system, the coordinate data collected directly from the motion capture system often has a certain degree of twist and tilt, so it is difficult to directly reflect the real elevation data of the target. According to the relevant research, the motion capture technology and the traditional mapping technology are together used in this study for collaborative fitting and optimization (Nagymáté et al., Nagymáté et al., 2018) to further ensure the accuracy of the relevant data. Firstly, after the installation of the structural columns, the level data of the center point of each column top will be manually recorded once. Then, after the motion capture system is deployed, the center point level information of each column top is once again recorded by the MoCap system. Therefore, the two groups of data form a set of basic positioning grids. By using the error fitting algorithm of iterative closest point optimization (ICP), the on-site BIM system performs a global fitting on the coordinate data of the two sets of grid points, so as to eliminated the possible tolerance from the MoCap system. With such algorithm, multiple tests are done in a indoor 12*8 m site with 8 camera to test the precision of predicted MoCap positioning. In the tests, both the cases of rectangular and linear arrangement of cameras are tested. Multiple points are selected and measured both by the MoCap System as tested values and by an API Laser Tracer as ground truth. The results show that the errors in the Z direction are controlled within ±1 mm between the two systems (Fig. 11-12).

Error between the MoCap system (rectangular arrangement) and Laser Tracer measurement

Error between the MoCap system (linear arrangement) and Laser Tracer measurement
At the same time, the global positioning point data composed of total station also facilitates the stitching and integration of the overall elevation data after the motion capture camera is moved to the next area, thus ensuring the real-time monitoring and analysis of multi-points in the whole working area with a high feedback frequency and precision. In order to assist the related construction leveling process, a leveling supporting system is developed as a plugin software in the BIM system and it can directly show the leveling information of each marker point during the on-site construction. By placing markers on different concrete slab tops, the elevation information of relevant marking points can be obtained in real time. By judging the X and Y coordinates of the positioning information, if the ball is located at the center of the top, the Z coordinate of the ball is considered to be the overall elevation of the roof of the structure. Otherwise, it will be considered as a free target and with multiple data such as X, Y, Z coordinates to be shown in the software. Therefore, during on-site construction, the workers can first place any markers in the center of the top of any structural components within the detection range, and simultaneously obtain the overall installation leveling information through the assistance system, and make a preliminary design for the adjustment plan (Fig. 13). In the assistant system, the leveling tolerance of each structural slab is displayed in real time. And by setting the range of the error threshold, the concrete slab that exceeds the threshold will be filtered and presented as red in real time (Fig. 14). For the fine-tuning process of the platform, it is often necessary to adjust the fine-tuning device located at the intersection point, and this can also be done by moving the trackers to the intersection point. At this time, the coordinates in the leveling support system will change to free point mode and the representative error will presented synchronously through the digital twin model on the large screen on site, so that the workers can quickly control the refined adjustment of the entire structure.

On-site leveling calibration with the MoCap system

Real-time analysis and feedback of the leveling support system
4 Result and discussion
Based on the above-mentioned on-site monitoring system with various sensing technology, the information collection and analysis of all components for all key processes could be realized. During the on-site construction, information integration through the BIM model system and the digital twin model can effectively reflect the advantages and disadvantages of on-site construction organization and management, and provide the necessary basis for organizational optimization for the repeated disassembly and assembly operations of the entire structure. At the same time, the record of time-consuming information of different construction processes can also help construction planners to find key defects in the entire structural design, so as to evaluate the system and optimize related designs. The digital twin model of the field data is displayed by the attribute information of the corresponding component in the BIM software, and finally reflected the change of the construction status by different colors. Therefore, on-site construction manager can monitor the data remotely and analyze the development of the whole process. Finally, the relevant data will be outputted as the construction log of the EXCEL file, so that the whole process of a complete disassembly and construction process can be traced and recorded.
In terms of the final construction leveling effect verification, in the real construction project, a test area where most of the leveling process is performed by the motion capture system and a comparison area which only undergoes preliminary manual leveling are set up. A comparative measuring with laser tracker is carried out to test the precision of the method. The results show that the area that has undergone elevation monitoring and leveling assistance basically meets the project’s requirements for global and local elevation errors, and the overall accuracy is controlled between − 1.5 mm-1.5 mm (Fig. 15). Compared with this area, the elevation error of the unmonitored area is larger, and a large number of measuring points in the area are lower than the global expected elevation. The error is in the range of − 2 to − 10 mm, which is often related to the measurement data and experience of the workers. Therefore, the effectiveness and efficiency of the elevation monitoring method proposed in this research can be demonstrated.

Global Error Analysis of the Leveled/Unleveled Area (Measured by the Laser Tracer)
As conclusion, this research presents and discusses the possibility to apply a BIM-based system for the intelligent and sustainable construction of some possible DfD-based structure systems. It has also presented an innovative way for the Olympic Venues to be renovated for the new functions and usages. The system framework and key technologies are shown with an integrated BIM workflow, with corresponding IoT techniques, motion capture technique and the software interface in the Grasshopper plugin. As demonstrator, such construction method is applied in the China National Aquatics Centre for the rapid and repeatable scene transition from the 2008 summer swimming venue to the 2022 winter curling venue, effectively reducing the required structural construction time and ensuring the structure itself the high standard of elevation control requirements. Under the current social development background, this construction method will provide a potential green, efficient and sustainable energy-saving construction technology, and provide an enlightening direction for the digital development, sustainable development, energy conservation and emission reduction of the future construction industry .
Availability of data and materials
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
Abbreviations
- MoCap:
-
Motion Capture
- BIM:
-
Building Information Modeling
- DfD:
-
Design for Disassembly
References
Abuzied, H., Senbel, H., Awad, M., & Abbas, A. (2020). A review of advances in design for disassembly with active disassembly applications. Engin Sci and Technol, an Int J, 23(3), 618–624.
Alberts, H. C. (2011). The reuse of sports facilities after the winter Olympic games. Focus on Geogr, 54(1), 24.
Eckelman, M. J., Brown, C., Troup, L. N., Wang, L., Webster, M. D., & Hajjar, J. F. (2018). Life cycle energy and environmental benefits of novel design-for-deconstruction structural systems in steel buildings. Build and Environ, 143, 421–430.
EPA, U. (2015). Advancing sustainable materials management: 2014 fact sheet.
Essex, S., & Chalkley, B. (1998). Olympic games: Catalyst of urban change. Leis Studies, 17(3), 187–206.
Essex, S., & Chalkley, B. (2004). Mega-sporting events in urban and regional policy: A history of the winter Olympics. Plan Perspect, 19(2), 201–204.
Guy, B., & Ciarimboli, N. (2003). Design for disassembly in the built environment. : WA, Resource Venture, Inc. Pennsylvania State University.
Hinrichs, R. N., & McLean, S. P. (1995). NLT and extrapolated DLT: 3-D cinematography alternatives for enlarging the volume of calibration. J of Biomech, 28(10), 1219–1223.
Kukawka, P. (1999). Les Jeux Olympiques d'hiver: enjeux et perspectives. Grenoble 1968-Nagano 1998. Revue de Géographie Alpine, 87(1), 99–104.
Layke, J., Mackres, E., Liu, S., Aden, N., & Becqué, R. (2016). Accelerating building efficiency: Eight actions for urban leaders.
Lin, Z. (2011). Nakagin capsule tower and the Metabolist movement revisited. J of Archit Educ, 65, 13–32.
Mrkonjic, K. (2007). Environmental aspects of use of aluminium for prefabricated lightweight houses: Dymaxion house case study. J of Green Building, 2(4), 130–136.
Nagymáté, G., Tuchband, T., & Kiss, R. M. (2018). A novel validation and calibration method for motion capture systems based on micro-triangulation. J of Biomech, 74, 16–22.
Navarro-Rubio, J., Pineda, P., & García-Martínez, A. (2019a). Sustainability, prefabrication and building optimization under different durability and re-using scenarios: Potential of dry precast structural connections. Sustainable Cities and Society, 44, 614–628.
Navarro-Rubio, J., Pineda, P., & García-Martínez, A. (2019b). Sustainability, prefabrication and building optimization under different durability and re-using scenarios: Potential of dry precast structural connections. Sustainable Cities and Society, 44, 614–628.
Rios, F. C., Chong, W. K., & Grau, D. (2015). Design for disassembly and deconstruction-challenges and opportunities. Procedia Eng, 118, 1296–1304.
Arup. (2021). The Circular Economy in The Built Environment. https://www.arup.com/perspectives/publications/research/section/circular-economy-in-the-built-environment.
MacRury I. (2009). Olympic Cities: 2012 and the Remaking of London. In G. Poynter (Ed.), (1st ed.). Routledge. https://doi.org/10.4324/9781315247748.
Acknowledgements
This article is extended and revised from a conference paper (named: Levelling Calibration and Intelligent Real-time Monitoring of the Assembly Process of a DfD-based Prefabricated Structure using a Motion Capture System) in the DigitalFUTURES-CDRF 2022: The 4th Conference on Computational Design and Robotic Fabrication (CDRF 2022). The author would also like to thank Ming LU, Mingyang LI, Boqiang YAO, Tingshu CHE, Deyuan SUN for their help during the whole research.
Funding
This paper is supported by the National Key R&D Program of China (2020YFF0304303).
Author information
Authors and Affiliations
Contributions
Written by Xiang WANG and Yang LI. On-site experiments finished by Ziqi ZHOU and Xueyuan LV. Directed by Philip F. YUAN and Lei CHEN.All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
N/A
Consent for publication
Not applicable.
Competing interests
The author has no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, X., Zhou, Z., Lv, X. et al. Intelligent renovation of existing Olympic venues: digital design and construction strategy of a DfD-based prefabricated structure system. ARIN 2, 4 (2023). https://doi.org/10.1007/s44223-022-00018-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44223-022-00018-5