
Abstract
We discuss our efforts aimed at simultaneous improvement of the levels of thrust, thrust-to-power ratio (TPR) and efficiency of the two-stage micro-cathode arc thruster with magneto-plasma-dynamical second stage (μCAT-MPD). Such efforts include planar construction of the first stage (μCAT) with tightly-pressed ring anode and central disc cathode, enhanced hardness and durability of the inter-electrode dielectric gap provided by deposited boron-copper thin film, refractory (Mo) second-stage electrode, higher and stabilized second-stage voltage, and improved thermal isolation of the permanent magnet from the discharge area. Aforementioned features allowed achieve the average thrust of milli-newton range – up to 1.7 ± 0.3 mN, together with high TPR of 37 μN/W and efficiency of 50%, remaining low mass (~ 100 g) and low consuming power (~ 50 W) of the thruster.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Hall-effect [1] and ion thrusters [2] that use xenon propellant are among the most developed and energy-efficient technologies for electric propulsion that use electric power in the range of hundreds to thousands of Watts. However, the efficiency of these systems drastically deteriorates at power levels lower than 100 W [3]. This fact, together with the high price and limited production of xenon worldwide [4] necessitates further research into alternative electric propulsion technologies. The use of xenon can be avoided with electrode-less inductive pulsed plasma thrusters [5]. These thrusters can use a broad range of propellants, including toxic and hazardous materials, since there is minimal contact with the thruster’s walls. Effective electric propulsion at low power can be achieved with magnetic nozzle thrusters that operate in a power range from tens of watts to hundreds of kilowatts [6]. These thrusters generate thrust by converting the thermal energy from the plasma’s charged particles into a directed flow [6,7,8]. A promising design for an energy-efficient and xenon-free plasma thrusters suitable for the propulsion of small satellites at low power levels are the micro-cathode arc thrusters (μCAT). In a single-stage configuration, the μCAT uses a trigger-less ignition (invented by A. Anders et al. [9]) to form a vacuum arc that produces an average thrust T in the micro-newton range with a thrust-to-power ratio (TPR) of several micro-newton per watt [10]. In our recent research [11], we have demonstrated experimentally that the T, the TPR and the efficiency η of the μCAT can be increased many times by adding a magneto-plasma-dynamical (MPD) second stage which further accelerates the plasma. We have previously reported the following maximal parameters of a two-stage μCAT-MPD thruster: an average thrust T of ~ 210 μN at a TPR of ~ 18 μN/W and an efficiency η of up to 50%. Some electric propulsion applications will still require higher values of thrust – up to milli-newton range. The aim of the present work is to investigate our ability to further increase the thrust (toward milli-newton range) and to improve the TPR levels of the two-stage μCAT-MPD thruster. We also aim to confirm that the thruster will remain stable at longer durations of operation at power levels below 50 W.
Experimental setup and methods
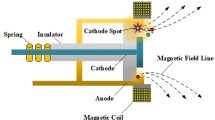
Experiments were conducted on two – planar and coaxial – configurations of the first stage (Fig. 1). The coaxial configuration with a small Brass cathode (Fig. 1, b) was inherited from our previous work [11]. The advantage of this configuration was that in higher cathodic current densities, it generated higher values of Lorentz force. However, with an increase in the discharge power at the second stage, we encountered the following issues. Since the magnet was placed right above the outer anode, the powerful discharge caused substantial overheating of the magnet and deterioration of its magnetic properties. The concentration of high discharge current onto the small tip of cathode made of fusible and volatile brass led not only to high ion-to-arc current ratios but it also caused a macroscopic deformation of the cathode tip and a massive production of slow droplets of cathode material. These observations led us to create a planar configuration of disc-shaped electrodes for the first stage (Fig. 1, a).

Schematic of the two-stage μCAT-MPD thruster with a) planar (central Ti-cathode, outer Cu anode) and b) coaxial (central Brass cathode, outer Cu anode) configuration of the first-stage electrodes
The planar construction of the disc-shaped electrodes, that have a wider surface area, increased the overall length of the anode-cathode gap. This design allowed high values of exhausting ions current with lower cathodic current density, so there was no cathode deformation. An added benefit was that the cathode and anode lengths were shorter, which resulted in a light-weight compact design of the thruster. This new design allowed us to place the thruster on the movable arm of a torsional thrust stand [12] so the average thrust could be measured directly. Previously, we were forced to indirectly measure the thrust values [11]. To improve the thruster lifetime at higher discharge powers, a stable electrical contact between the first-stage electrodes was ensured by pressing them together with nuts and bolts across the anode surface. The anode-cathode gap width was extended from ~ 0.5 mm in coaxial configuration to ~ 3 mm, and was thereby optimized for the high power regime, which prevented short circuits between these electrodes after numerous powerful pulses. The surface of the ceramic washer was also improved by adding a thin boron-copper film with a fore-vacuum electron source (Fig. 2).

Experimental setup (a) and SEM image (b) of the surface of boron-copper thin film deposited over inter-electrode ceramic washer
The lower copper layer of the film was used to redistribute the point-like peaks of heating at the cathodic spot to a wider area of the ceramic washer, thereby minimizing the thermal stress on the washer. The upper level of the film consisted of amorphous boron layer with hard and wear-resistant properties. This layer ensured higher resistance of the film against sputtering and wear from the impact of plasma particles.
The overheating of the magnet was minimized by placing the magnet behind a thick thermally-insulating ceramic washer, which also protected the magnet from the discharge area. The magnet was electrically insulated from all current-conducting electrodes to prevent additional heating from the discharge current.
Preliminary plasma was created by a first-stage PPU consisting of a 25 V dc power supply, a 2.2 mF polar capacitor C1, an inductor L of 550 μH with ferrite core, and an IGBT gated by a rectangular voltage with amplitude 5 V, pulse duration of 0.35 ms and pulse repetition rate of up to 20 Hz (Fig. 1, a). Opening the IGBT caused a surge of current through the inductor which in turn created the voltage U1(t) ~ LdI/dt applied between the cathode and anode. This voltage increase lead to the trigger-less ignition of the arc between these electrodes.
The second-stage voltage UMPD was lifted up to much higher voltages than before – up to 180 V, and was stabilized by a high-capacity (22 mF) capacitor during the flow of high current I2(t) in the second stage.
Total ion current was measured from a negatively-biased stainless-steel semispherical electrode placed directly in front of the thruster exhaust. The thrust-to-power ratio TPR was calculated using the directly measured average thrust T while the total power P was estimated by using the experimental waveforms from the currents and voltages in both stages according to the formula:
Aforementioned efforts allowed us to improve the performance of the thruster. Details are provided in the section below.
Results and discussion
Experiments have demonstrated that both configurations of the μCAT-MPD thruster operate stably at higher values of power (tens of Watts) dissipated in both stages. Figure 3 shows that the current waveforms of the preliminary plasma-generating first stage have comparable amplitudes but much shorter durations than the second stage waveforms. This means that the second stage is still the main component for the generation of thrust-producing ions that are expelled from the thruster in a single pulse, since, the total number of ions produced by the first or second stage within single pulse are directly proportional to the integrals \(\int_0^{\tau_1}{I}_1(t) dt/ Ze,\int_0^{\tau_2}{I}_2(t) dt/ Ze\), of the respective discharge currents. As can be seen, the amounts for the second stage are much higher than the first stage due to a longer second-stage current duration (τ2 > > τ1) at UMPD higher than 50 V.

First (a) and second (b) stage discharge current waveforms for the planar configuration
Figure 4 shows that the first-stage currents for both configurations of the thruster have comparable amplitudes and durations. The first-stage currents do not seem to depend on the level of the second-stage voltage. The second-stage current amplitude and duration on both configurations grow with the second-stage voltage. But, the second-stage current on the coaxial thruster with the brass cathode reaches higher amplitudes and durations in comparison with the planar configuration and Ti cathode. Measurements of the total ion current exhausting from the thruster demonstrate that the higher discharge characteristics of the thruster with a coaxial configuration result in a more intensive ion exhaust (Fig. 5). One can see that the absolute values of exhausting ions current reach the level of amperes, having duration of up to several tens of milliseconds.

First (a) and second (b) stage discharge current waveforms for the coaxial configuration

Total ion current vs. time and second-stage voltage for coaxial (a) and planar (b) configurations
The thruster with the coaxial configuration and a brass cathode (Fig. 5, a) provides many more ions with a longer pulse duration than the planar configuration and Ti cathode (Fig. 5, b), even when they were connected to an identical PPU. This may be caused by the significant difference in the thermal-physical properties of these materials: the components of brass (65% Cu, 35% Zn) have lower heats of vaporization (300.4 kJ/mole for Cu, 115 kJ/mole for Zn) in comparison with the heat of vaporization for the titanium (425 kJ/mole). Despite a significant superiority in exhausting ions current, the brass cathode suffer from higher degree of deformation because of firing at such an extreme performance regime, as can be seen in photos in the Fig. 6.

Images of electrode system of planar (a) and coaxial (b) thrusters after multiple high-power pulses. Note that coaxial cathode (b) is largely deformed from its original precise cylindrical shape; large droplets of cathode material are also visible
Another possible reason for the higher ion currents from the thruster with the brass cathode may be the fact that the visible cross-section of its “cathode edge – second stage electrode opening” interface (Fig. 6, b) is larger than that for the planar one (Fig. 6, a), therefore, the loss of ions on the inner wall near the second-stage opening is decreased. This issue requires further optimization. Our previous study [13] have demonstrated that the lifetime of μCAT in a single-stage configuration for the case of Ti cathode can be up to ~ 1.2–1.3 million pulses with more or less uniform erosion of the cathode surface. Large macroscopic droplets of cathode materials that are exhausted from a brass cathode may lead to a lower thruster lifetime, due to the fast deterioration of the cathode-anode gap geometry and a higher risk of short circuits.
Finally, experiments on the direct thrust measurements with a thrust stand have demonstrated that for the thruster with planar configuration and a Ti cathode, the thrust grows by three orders of magnitude with the second-stage voltage UMPD, and it was able to generate a milli-newton level of thrust (Fig. 7).

Average thrust vs. second-stage voltage for the planar configuration of μCAT-MPD thruster with Ti cathode
From the Fig. 7, it is seen that TPR also grows with the UMPD from 0.8 to 37.4 μN/W. At the highest thrust value at UMPD = 180 V, the estimated efficiency η and the total power were ~ 50% and less than 50 W, respectively. The combination of the achieved performance parameters of the μCAT-MPD thruster – thrust of 1.7 ± 0.3 mN, together with high TPR of 37 μN/W and efficiency of 50%, with low mass (~ 100 g) and total power of < 50 W are superior to many of the known devices operating at comparable power levels. One should note that the dependence of average thrust on second-stage voltage doesn’t show any signs of saturation at maximal UMPD, which suggests that one can expect an even higher performance with further optimization of the device and with increases to the second-stage power levels.
Concluding remarks
Preliminary experiments have demonstrated that the upgraded planar configuration of the two-stage μCAT-MPD thruster is able to operate stably at higher values of power (up to 50 W) dissipated in both stages, without failures in the preliminary plasma-generating first stage. The thruster in the mentioned configuration achieved a milli-newton range of average thrust. This performance improvement was possible thanks to several important design features. A planar construction of the first stage with wide and long cathode-anode gap minimized the risk of short circuit between these electrodes. Other important features include the thermal and electrical isolation of the magnet from the discharge area, as well as the increase of the second-stage voltage level and its stabilization by a large capacitor. The usage of brass as a cathode material in coaxial configuration of the thruster allowed for higher amplitudes and durations of the exhausting ion currents at high second-stage voltages, but this also lead to the destruction of the cathode itself. In the planar configuration with the titanium cathode, the thruster achieved a millinewton range of thrust (1.7 ± 0.3 mN) with a high TPR of 37 μN/W and efficiency of 50%, but it also seems that the further improvement is still feasible.
Availability of data and materials
The data that support the findings of this study are available from the corresponding author, DBZ, upon reasonable request.
References
Hall SJ, Jorns BA, Gallimore AD, Goebel DM (2020) “Operation of a high-power nested Hall thruster with reduced cathode flow fraction,” J Propuls Power, 36(6):912–20, https://doi.org/10.2514/1.B37929
Holste K, Dietz P, Scharmann S, Keil K, Henning T, Zschätzsch D, Reitemeyer M, Nauschütt B, Kiefer F, Kunze F, Zorn J, Heiliger C, Joshi N, Probst U, Thüringer R, Volkmar C, Packan D, Peterschmitt S, Brinkmann K-T, Zaunick H-G, Thoma MH, Kretschmer M, Leiter HJ, Schippers S, Hannemann K, Klar PJ (2020) “Ion thrusters for electric propulsion: Scientific issues developing a niche technology into a game changer,” Rev Scientific Instruments. 91(6):061101 (1–55). https://doi.org/10.1063/5.0010134
Levchenko I, Bazaka K, Ding Y, Raitses Y, Mazouffre S, Henning T, Klar P, Shinohara S, Schein J, Garrigues L, Kim M, Lev D, Taccogna F, Boswell RW, Charles C, Koizumi H, Yan S, Scharlemann C, Keidar M, Xu S (2018) “Space micropropulsion Systems for Cubesats and Small Satellites: from proximate targets to furthermost Frontiers”. App Physics Rev. 5:011104, https://doi.org/10.1063/1.5007734
Banerjee D, Simon CM, Elsaidi SK, Haranczyk M, Thallapally PK (2018) “Xenon gas separation and storage using metal-organic frameworks,” Chem. 4(3):466–94. https://doi.org/10.1016/j.chempr.2017.12.025
Polzin K, Martin A, Little J, Promislow C, Jorns B, Woods J (2020) State-of-the-Art and Advancement Paths for Inductive Pulsed Plasma Thrusters. Aerospace 7(8):105(1–67). https://doi.org/10.3390/aerospace7080105
Wachs B, Jorns B (2020) Background pressure effects on ion dynamics in a low-power magnetic nozzle thruster. Plasma Sources Sci Technol 29(4):045002. https://doi.org/10.1088/1361-6595/ab74b6
Little JM, Choueiri EY (2019) Electron Demagnetization in a Magnetically Expanding Plasma. Physical Rev Letters 123(14):145001(1–5) https://doi.org/10.1103/PhysRevLett.123.145001
Little JM, Choueiri EY (2016) Electron cooling in a magnetically expanding plasma. Phys Rev Lett 117(22):225003. https://doi.org/10.1103/PhysRevLett.117.225003
Anders A, Brown IG, MacGill RA, Dickinson MR (1998) `Triggerless' triggering of vacuum arcs. J Phys D Appl Phys 31(5):584. https://doi.org/10.1088/0022-3727/31/5/015
Keidar M, Schein J, Wilson K, Gerhan A, Au M, Tang B, Idzkowski L, Krishnan M, Beilis II (2005) Magnetically enhanced vacuum arc thruster. Plasma Sources Sci Technol 14(4):661–669. https://doi.org/10.1088/0963-0252/14/4/004
Zolotukhin DB, Daniels KP, Brieda L, Keidar M (2020) Onset of the magnetized arc and its effect on the momentum of a low-power two-stage pulsed magneto plasma-dynamic thruster. Phys Rev E 102(2):021203. https://doi.org/10.1103/PhysRevE.102.021203
Kolbeck J, Porter TE, Keidar M (2017) High precision thrust balance development at the George Washington University. In: 35th Int. electric propulsion Conf. Georgia Institute of Technology, Atlanta, GA, p IEPC–2017–405
Zolotukhin DB, Keidar M (2018) Optimization of discharge triggering in micro-cathode vacuum arc thruster for CubeSats. Plasma Sources Sci Technol 27(7):074001. https://doi.org/10.1088/1361-6595/aacdb0
Funding
The work on μCAT-MPD thruster manufacturing and characterization was supported by an Air Force Office of Scientific Research, FA9550-19-1-0166 (Dr. Mitat Birkan is program manager) and NASA DC Space Grant Consortium. The deposition of the protective thin film was supported by the grant of the President of the Russian Federation (MK-1399.2022.4).
Author information
Authors and Affiliations
Contributions
Arrangement of the experimental setup, data collection and analysis were performed by DBZ, SRPB and KPD. Deposition of protective coating was performed by AVT and YGY. The initial draft of the manuscript was written by DBZ. The concept of the research and funding acquisition has been made by MK. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Consent for publication
All authors gave their explicit consent to submit the content of this article for publication on Springer Journal of Electric Propulsion.
Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zolotukhin, D.B., Tyunkov, A.V., Yushkov, Y.G. et al. A two-stage μCAT-MPD thruster: toward millinewton thrust. J Electr Propuls 1, 22 (2022). https://doi.org/10.1007/s44205-022-00026-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44205-022-00026-7