
Abstract
This paper concerns the persistence of kink and periodic waves to singularly perturbed two-component Drinfel’d-Sokolov-Wilson system. Geometric singular perturbation theory is first employed to reduce the high-dimensional system to the perturbed planar system. By perturbation analysis and Abelian integrals theory, we then are able to find the sufficient conditions about the wave speed to guarantee the existence of heteroclinic orbit and periodic orbits, which indicates the existence of kink and periodic waves. Furthermore, we also show that the limit wave speed \(c_0(k)\) is increasing.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
As we know, partial differential equations (PDEs) provide a good way to model the phenomena in real world and their studies have significant applications in many fields such as mathematics, physics, engineering, and so on. A lot of efficient and effective numerical and analytical methods have been developed to study the solutions and their dynamical behaviors. As we know, the classical two-component Drinfel’d-Sokolov-Wilson (DSW) system [1,2,3]
with parameters p, q, a and b, is an important water wave model, which is used to describe the nonlinear surface gravity waves propagating over horizontal seabed. System (1) was originally introduced by Drinfel’d and Sokolov [1, 2] and Wilson [3] from the shallow water wave models. Later, Hirota et al. [4] also derived system (1) from the Kadomtsev–Petviashvili hierarchy. Due to the great applications in physical fields, there have been considerate work concerning the solutions and their dynamics of system (1) and its variants. For example, Hirota et al. [4] provided the soliton structure of system (1). Yao and Li [5] constructed some exact solutions of system (1) through a direct algebra method. Likewise, Liu and Liu [6] presented its four kinds of exact solutions algebraically and revealed their relations. Fan [7] devised an algebraic method to uniformly construct a series of exact solutions of system (1). By improving generalized Jacobi elliptic function method, Yao [8] found some traveling wave solutions of system (1). Doubly periodic wave solutions of system (1) were also constructed through the Adomian decomposition method [9] and an improved F-expansion method [10]. The bifurcation method [11] and the Exp-function method [12] were also employed to derive exact solutions of system (1). Additionally, some methods including the modified kudryashov method [13], the first integral method [14] and the bifurcation method [15, 16] were extended to find abundant exact solutions of fractional DSW system. However, we find that there is little work concerning singularly perturbed DSW system. In fact, in modelling real world problems, such as the shallow water waves in nonlinear dissipative media [17] and dispersive media [18], some relatively weak influences due to uncertainty or perturbation are unavoidable. Therefore, one generally should include certain type of small perturbation to obtain a more realistic model and to better understand its dynamics. Recently, the singularly perturbed models widely appear in modeling the problems across many areas of the natural sciences, and has attracted more and more interest [19,20,21,22,23,24,25,26,27,28,29,30]. Ogawa [19] investigated the persistence of solitary waves and periodic waves of the perturbed KdV equation and Yan et al. [20] further proved the results for a perturbed generalized KdV equation. Further, Chen et al. [22] also considered the persistence of kink and periodic waves for a perturbed defocusing mKdV equation. Chen et al. [21] also obtained the persistence of solitary waves and periodic waves for the perturbed generalized BBM equation. Among most of these work [19,20,21, 23, 24, 26, 27], the authors focused on solitary waves and periodic waves, and little [22, 25] concerned kink waves, especially for the two-component systems. As a matter of fact, kink waves have been found in many important integrable models [31,32,33,34,35,36] including negative–order KdV equation and Camassa–Holm equations, and are believed to have many significant applications in fluid mechanics, nonlinear optics, classical and quantum fields theories etc. Therefore, it is of interest to check whether these kink waves persist under perturbation.
In this paper, we intend to examine the dynamics of the following singularly perturbed two-component DSW system
where the parameters \(p<0, a>0, b>0, q>0\), and small \(\varepsilon >0\) standing for the perturbation parameter. In system (2), \(u_{xx}\) and \(u_{xxxx}\) represent the backward diffusion and dissipation terms, respectively. At first glance, one might expect that system (2) should have similar solutions with system (1). As indicated in [19], the answer to this question is significant not only mathematically but also in the application point of view, since in some physical circumstances, for example the Reynolds number is large or surface tension is small, correspond to the case when \(\varepsilon\) is small. Besides, it also helps understand the role of dispersion, dissipation, and instability in nonlinear wave systems. Our aim is to show the persistence of kink and periodic waves with singular perturbation under suitable conditions. To be specific, we first reduce the corresponding high-dimensional system to the perturbed planar system by geometric singular perturbation theory (GSPT). Then we are able to study the wave speed in detail by perturbation analysis and Abelian integrals theory, from which we find the sufficient conditions to guarantee the existence of heteroclinic orbit and periodic orbits, which indicates the existence of kink and periodic waves. Furthermore, we also show that the limit wave speed \(c_0(k)\) is increasing for \(k\in [-\frac{1}{4q},0)\).
2 The reduction of traveling wave system on the slow manifold
In this section, we derive the reduction of traveling wave system corresponding to (2) on the slow manifold by exploiting GSPT.
The transformations
with \(c>0\), convert system (2) into the following system
The first equation of (3) yields
with constant \(g_{1}\). Substituting it into the other equation of (3) yields
Exploiting the transformations \(\eta =\sqrt{ag_{1}-c}\ \xi\) and \(\varphi =\sqrt{\frac{-6c(ag_{1}-c)}{p(a+2b)}}\phi\), where \(ag_{1}-c>0\), we can rewrite (4) as
where dot indicates the derivative with respect to \(\eta\).
System (5) indicates the following singularly perturbed system
which is called the slow system, and has three equilibrium points \((0,0,0), (-1,0,0)\) and (1, 0, 0).
Introducing the transformation \(\tau =\frac{\eta }{\varepsilon }\), we obtain the following equivalent fast system corresponding to system (6)
Letting \(\varepsilon =0\) in system (6), we obtain the critical manifold
Note that the linearization of the fast system (7) restricted on \(C_{0}\) is given by the following matrix
Obviously, the matrix \(\textbf{M}\) has three eigenvalues \(\lambda _1=0, \lambda _2=0\) and \(\lambda _3=\dfrac{-q}{\sqrt{ag_{1}-c}}\), and therefore \(C_0\) is normally hyperbolic. According to GSPT, for \(\varepsilon >0\) sufficiently small, three exists a two-dimensional submanifold \(C_\varepsilon\) of \(R^{3}\) within the Hausdorff distance \(\varepsilon\) of \(C_0\), which is invariant under the flow of system (6).
One can write
where \(Z(\phi ,y,\varepsilon )\) depends smoothly on \(\phi ,y,\varepsilon\), and satisfies \(Z(\phi ,y,0)=0\). We can expand \(Z(\phi ,y,\varepsilon )\) in \(\varepsilon\) as follows
By substituting it into the slow system (6), we can get
Equating the coefficients of \(\varepsilon\), we can obtain
Therefore, the dynamics on the slow manifold \(C_\varepsilon\) for system (6) is determined by
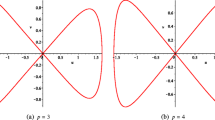
It is easy to check that system (10) with \(\varepsilon =0\) is a Hamiltonian system with the Hamiltonian function
and its phase portrait is given in Fig. 1. In addition, we have \(H(0,0)=0\) and \(H(\pm 1,0)=-\frac{1}{4q}\). Then we can parameterize the traveling waves of system (10) with \(\varepsilon =0\) through the curves \(H(\phi ,y)=k\) with parameter k, and display the existence result of traveling wave solutions of system (2) as in the following theorem.

The phase portrait of system (10) with \(\varepsilon =0\)

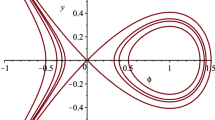
Illustrations of orbits of system (10)
Theorem 2.1
For the perturbed two-component DSW system (2), we have the following results.
-
1.
There exists \(\varepsilon _0>0\), \(\varepsilon \in (0,\varepsilon _0)\) and \(k\in [-\frac{1}{4q},0)\), system (2) has a traveling wave
$$\begin{aligned} u=\sqrt{\frac{-6c(ag_{1}-c)}{p(a+2b)}}\phi (\varepsilon ,h,c,\eta ), \ w=\frac{p}{2c}u^{2}+g_{1}, \end{aligned}$$(12)where \(c=c(\varepsilon ,k)\), and \(\phi (\varepsilon ,k,c,\eta )\) is the solution of (5).
-
2.
\(c=c(\varepsilon ,k)\) is a smooth function of \(\varepsilon\) and k, with the limit \(c_0(k)\) as \(\varepsilon \rightarrow 0\), where \(c_0(k)\) is a smooth increasing function for \(k\in [-\frac{1}{4q},0)\), moreover,
$$\begin{aligned} ag_1-\frac{5q}{2}\le c_0(k)\le ag_1-q,~ \lim _{k \rightarrow -1}c_0(k)=ag_1-\frac{5q}{2},~ \lim _{k \rightarrow 0}c_0(k)=ag_1-q. \end{aligned}$$(13) -
3.
When \(\varepsilon \rightarrow 0\), \(\phi (\varepsilon ,k,c,\eta )\) converges to \(\phi (0,k,c_0(h),\eta )\), which is the solution of system (10) with \(\varepsilon =0\), uniformly in \(\eta\).
Remark 1
It is well-known that system (10) with \(\varepsilon =0\) has heteroclinic orbit and a family of periodic orbits, which correspond to kink and periodic waves of system (1) [11], and it is natural to ask whether these heteroclinic orbit and periodic orbits will break up or persist under perturbation in system (2). Theorem 2.1 provides the sufficient conditions about the wave speed to guarantee the persistence of heteroclinic orbit and periodic orbits of system (2), which indicates the existence of kink and periodic waves to system (2).
3 Perturbation Analysis
In this section, we exploit perturbation analysis to check whether the periodic orbits and the heteroclinic orbits persist.
For \((\theta ,0), -1<\theta <0\), let \((\phi (\eta ),y(\eta ))\) be the solution of system (10) with initial point \((\phi ,y)(0)=(\theta ,0)\) (see Fig. 2a). Then there exist \(\eta _1>0\) and \(\eta _2<0\), which satisfy
and
Define
where
Obviously, \(\Phi (\theta ,c,\varepsilon )=0\) if and only if \(\phi (\eta )\) is a periodic solution of (10). We expand \(\Phi (\theta ,c,\varepsilon )\) in \(\varepsilon\) and obtain
where
in which, \((\phi _0, y_0)\) is a solution of system (10) with \(\varepsilon =0\) and this integral is performed on a level curve \(H=H(\theta ,0)\in (-\frac{1}{4q},0)\), since
and
by exploiting integration by parts.
Therefore, \(\Phi _1(\theta ,c)=0\) indicates that the limit speed \(c_0(k)\) satisfies
We can define the similar function for a heteroclinic orbit as
in which, the first integral is performed along with the solution \((\phi (\eta ), y(\eta ))\) on the one dimensional unstable manifold of the saddle point \((-1,0)\) with \(y(\eta )>0\) for \(-\infty<\eta <0\) and \(y(0)=y_1\), where \(y_1\) is the y coordinate corresponding to the intersection point of the unstable manifold of \((-1,0)\) and the y axis (see Fig. 2b). The later is defined similarly. Following the similar procedure, we also deduce that the limit speed \(c_0(k)\) satisfies (15), where \(\phi _0\) is a solution of system (10) with \(\varepsilon =0\) and the integration is performed on the curve \(H=-\frac{1}{4q}\).
4 Analysis by the Abelian Integral Theory
In this section, we first express the limit speed \(c_0(h)\) in the form of Abelian integrals and then study its properties. Furthermore, we will prove the Theorem 2.1.
Assume that \(\phi (\eta )\) is the solution of system (10) with \(\varepsilon =0\), and Q and R are defined by
where the integrals are performed along the orbits of system (10).
Introducing a new variable \(h=4qk\), now from (15), we can treat \(c_0(k)\) as a function of h
Now it is time to analyze Q and R in detail. Suppose that \(\pm \alpha (h)\) and \(\pm \beta (h)\) are four roots of \(\phi ^4-2\phi ^{2}-h=0\), where \(-1\le h<0\), satisfying \(0\le \alpha (h)\le \beta (h)\). Therefore, we can express Q and R as
where \(E(\phi )=\sqrt{\phi ^4-2\phi ^{2}-h}\).
For convenience, we introduce the following integrals:
which satisfy
by direct calculus. Now we can rewrite Q and R as
To study the monotonicity of \(c_0(h)\), we turn to \(Z(h)=\frac{Q}{R}\), and present its properties in Proposition 4.1.
Proposition 4.1
We have
Moreover
To prove Proposition 4.1, we need the following lemmas.
Lemma 4.1
We have
Proof
Through direct calculus, we have
and \(\frac{J_2\left( -1\right) }{J_0\left( -1\right) }=\frac{1}{5}\) follows. In addition, by the squeeze theorem, we easily get
\(\square\)
Lemma 4.2
We have
Proof
Differentiating both sides of \(E^{2}=\phi ^{4}-2\phi ^{2}-h\) with respect to \(\phi\) yields
and it follows that
by integration by parts and (18). Hence, we have
Similarly, we have
and it follows that,
\(J_4\) and \(J_6\) can be obtained in a similar way. Here we omit them. \(\square\)
From (19) and (20), we see that Q can be expressed by \(J_0'\) and \(J_2'\), which can be inversely expressed by \(J_0\) and \(J_2\) in Lemma 4.3.
Lemma 4.3
We have
where \(\Delta =h(h+1)\).
Proof
This lemma follows from the first two equations in (20) by direct calculation. \(\square\)
Lemma 4.4
We have
.
Proof
Exploiting (19) and (21), we easily obtain
and the statement follows. \(\square\)
To prove \(Z'(h)>0\) for \(-1<h<0\) in Proposition 4.1, we need to study the monotonicity of \(\frac{J_2}{J_0}\). To state conveniently, introduce the notations
Lemma 4.5
For \(-1<h_0<0\), if \(\tilde{A}'(h_0)=0\), then \(0<\tilde{A}(h_0)<\frac{1}{5}\).
Proof
Eliminating \(J'_0\) from the first two equations of (20), we arrrive at
i.e.
If \(\tilde{A}'(h_0)=0\), then we easily have \(\tilde{A}(h_0)=\hat{A}(h_0)\), and
Note that \(\frac{J'_0(h_0)}{J_0(h_0)}<0\) and \(h_0+1>0\), and it follows that
which indicates the statement. \(\square\)
Lemma 4.6
For \(-1\le h\le 0\), we have
and
Proof
The statements follow easily from Lemmas 4.1, 4.4 and 4.5. \(\square\)
Lemma 4.7
If \(\tilde{A}'(h_0)=0\) for \(-1<h_0<0\), then \(\tilde{A}''(h_0)>0\).
Proof
Differentiating both sides of the equations \(J_2=J_0\tilde{A}\) twice and \(J'_2=J'_0\hat{A}\) once with respect to h, respectively, yields
and it follows that
since \(\tilde{A}(h_0)=\hat{A}(h_0)\), if \(\tilde{A}'(h_0)=0\). Note that \(J_0>0\) and \(J'_0<0\), therefore, we just need show that \(\hat{A}'(h_0)<0\), which can be proved as follows
since \(h_0(h_0+1)<0\) and \(\hat{A}^{2}(h_0)-h_0>0\) for \(-1<h_0<0\). Thus, the proof is completed. \(\square\)
Hence we have the conclusion \(\tilde{A}'(h)=\left( \frac{J_2(h)}{J_0(h)}\right) '<0\) by the proof by contradiction (see Fig. 3 for illustration), based on the facts in Lemmas 4.1 and 4.7, and the following lemma follows from \(Z(h)=\frac{4}{q}\left( \frac{1}{4}-\frac{3}{4}\frac{J_2}{J_0}\right) =\frac{4}{q}\left( \frac{1}{4}-\frac{3}{4}\tilde{A}(h)\right)\).

Illustration of contradiction
Lemma 4.8
For \(-1<h_0<0\), \(Z'(h)>0\).
Obviously, the statements in Proposition 4.1 follow from Lemma 4.8. Now we can prove Theorem 2.1.
Since \(\frac{\partial \Phi _1}{\partial c}(\theta ,c_0(k))=\frac{\int (\phi ''_0)^{2} d\eta }{2\sqrt{ag_1-c_0(k)}}+\frac{\int (\phi '_0)^{2} d\eta }{2\sqrt{ag_1-c_0(k)}(ag_1-c_0(k))}>0\), by the implicit function theorem, there exist a unique smooth function \(c_h(\varepsilon )=c(\varepsilon ,h)\) for \(h\in [-1,0]\) and \(\varepsilon \in (0,\varepsilon _0)\) so that
The existence of \(c(\varepsilon ,h)\) indicates the first statement in Theorem 2.1, since \(k=\frac{h}{4q}\). While the second statement in Theorem 2.1 follows from Proposition 4.1, and the third statement holds obviously.
5 Conclusion
Through perturbation analysis and Abelian integrals theory, we derive the sufficient conditions about the wave speed to guarantee the existence of heteroclinic orbit and periodic orbits, which indicates the existence of kink and periodic waves. Besides, we also prove the monotonicity of the limit wave speed \(c_0(k)\). As we know, the wave phenomena, such as the discovery of solitary waves, kink and periodic waves, play an important role in fluid dynamics, plasma and elastic media. We believe that the waves found under small perturbation in a more realistic model will help facilitate the wave dynamics, and it potentially provides a way to analyze the propagation of the nonlinear waves.
Data Availibility Statement
The study has no data.
References
Drinfel’d, V.G., Sokolov, V.V.: Equations of Korteweg-de Vries type and simple Lie algebras. Sov. Math. Dokl. 23, 457–462 (1981)
Drinfel’d, V.G., Sokolov, V.V.: Lie algebras and equations of Korteweg-de Vries type. J. Sov. Math. 30(2), 1975–2036 (1985)
Wilson, G.: The affine Lie algebra \(C^{(1)}_2\) and an equation of Hirota and Satsuma. Phys. Lett. A 89(7), 332–334 (1982)
Hirota, R., Grammaticos, B., Ramani, A.: Soliton structure of the Drinfel’d–Sokolov–Wilson equation. J. Math. Phys. 27(6), 1499–1505 (1986)
Yao, R., Li, Z.: New exact solutions for three nonlinear evolution equations. Phys. Lett. A 297(3), 196–204 (2002)
Liu, C., Liu, X.: Exact solutions of the classical Drinfel’d–Sokolov–Wilson equations and the relations among the solutions. Phys. Lett. A 303(2), 197–203 (2002)
Fan, E.: An algebraic method for finding a series of exact solutions to integrable and nonintegrable nonlinear evolution equations. J. Phys. A: Math. Gen. 36(25), 7009–7026 (2003)
Yao, Y.: Abundant families of new traveling wave solutions for the coupled Drinfel’d–Sokolov–Wilson equation. Chaos Solit. Fract. 24(1), 301–307 (2005)
Inc, M.: On numerical doubly periodic wave solutions of the coupled Drinfel’d–Sokolov–Wilson equation by the decomposition method. Appl. Math. Comput. 172(1), 421–430 (2006)
Zhao, X., Zhi, H.: An improved F-expansion method and its application to coupled Drinfel’d–Sokolov–Wilson equation. Commun. Theor. Phys. 50(2), 309–314 (2008)
Wen, Z., Liu, Z., Song, M.: New exact solutions for the classical Drinfel’d–Sokolov–Wilson equation. Appl. Math. Comput. 215(6), 2349–2358 (2009)
Misirli, E., Gurefe, Y.: Exact solutions of the Drinfel’d–Sokolov–Wilson equation using the Exp-function method. Appl. Math. Comput. 216(9), 2623–2627 (2010)
Shehata, A., Kamal, E., Kareem, H.: Solutions of the space-time fractional of some nonlinear systems of partial differential equations using modified Kudryashov method. Int. J. Pure Appl. Math. 101(4), 477–487 (2015)
Javeed, S., Saif, S., Baleanu, D.: New exact solutions of fractional Cahn-Allen equation and fractional DSW system. Adv. Differ. Equ. 2018(1), 459 (2018)
Wen, Z.: The generalized bifurcation method for deriving exact solutions of nonlinear space-time fractional partial differential equations. Appl. Math. Comput. 366, 124735 (2020)
Wen, Z., Li, H., Fu, Y.: Abundant explicit periodic wave solutions and their limit forms to space-time fractional Drinfel’d–Sokolov–Wilson equation. Math. Methods Appl. Sci. 44(8), 6406–6421 (2021)
Christov, C., Velarde, M.: Dissipative solitons. Physica D 86(1–2), 323–347 (1995)
Karpman, V.I.: Non-Linear Waves in Dispersive Media, vol. 71. Elsevier, Amsterdam (2016)
Ogawa, T.: Travelling wave solutions to a perturbed Korteweg-de Vries equation. Hiroshima Math. J. 24(2), 401–422 (1994)
Yan, W., Liu, Z., Liang, Y.: Existence of solitary waves and periodic waves to a perturbed generalized KdV equation. Math. Model. Anal. 19(4), 537–555 (2014)
Chen, A., Guo, L., Deng, X.: Existence of solitary waves and periodic waves for a perturbed generalized BBM equation. J. Differ. Equ. 261(10), 5324–5349 (2016)
Chen, A., Guo, L., Huang, W.: Existence of kink waves and periodic waves for a perturbed defocusing mKdV equation. Qual. Theory Dyn. Syst. 17(3), 495–517 (2018)
Ge, J., Du, Z.: The solitary wave solutions of the nonlinear perturbed shallow water wave model. Appl. Math. Lett. 103, 106202 (2020)
Guo, L., Zhao, Y.: Existence of periodic waves for a perturbed quintic BBM equation. Discrete Contin. Dyn. Syst. 40(8), 4689 (2020)
Wen, Z.: On existence of kink and antikink wave solutions of singularly perturbed Gardner equation. Math. Methods Appl. Sci. 43(7), 4422–4427 (2020)
Zhang, L., Wang, J., Shchepakina, E., Sobolev, V.: New type of solitary wave solution with coexisting crest and trough for a perturbed wave equation, Nonlinear Dynamics 1–15 (2021)
Sun, X., Huang, W., Cai, J.: Coexistence of the solitary and periodic waves in convecting shallow water fluid. Nonlinear Anal. Real World Appl. 53, 103067 (2020)
Wen, Z., Zhang, L., Zhang, M.: Dynamics of classical Poisson–Nernst–Planck systems with multiple cations and boundary layers. J. Dyn. Differ. Equ. 33(1), 211–234 (2021)
Bates, P.W., Wen, Z., Zhang, M.: Small permanent charge effects on individual fluxes via Poisson–Nernst–Planck models with multiple cations. J. Nonlinear Sci. 31(3), 55 (2021)
Wen, Z., Bates, P.W., Zhang, M.: Effects on I-V relations from small permanent charge and channel geometry via classical Poisson-Nernst-Planck equations with multiple cations. Nonlinearity 34(6), 4464 (2021)
Qiao, Z., Li, J.: Negative-order KdV equation with both solitons and kink wave solutions. Europhys. Lett. 94(5), 50003 (2011)
Xia, B., Qiao, Z.: The N-kink, bell-shape and hat-shape solitary solutions of b-family equation in the case of b= 0. Phys. Lett. A 377(37), 2340–2342 (2013)
Qiao, Z., Xia, B.: Integrable peakon systems with weak kink and kink-peakon interactional solutions. Front. Math. Chin. 8, 1185–1196 (2013)
Xia, B., Qiao, Z., Li, J.: An integrable system with peakon, complex peakon, weak kink, and kink-peakon interactional solutions. Commun. Nonlinear Sci. Numer. Simul. 63, 292–306 (2018)
Yan, K., Qiao, Z., Yin, Z.: Qualitative analysis for a new integrable two-component Camassa-Holm system with peakon and weak kink solutions. Commun. Math. Phys. 336, 581–617 (2015)
Tovar, E., Gu, H., Qiao, Z.: On peakon and kink-peakon solutions to a (2+ 1) dimensional generalized Camassa-Holm equation. J. Nonlinear Math. Phys. 24(1), 29–40 (2017)
Acknowledgements
The authors are grateful to the referees and the editor for his/her careful reading and very helpful suggestions which improved and strengthened the presentation of this manuscript.
Funding
This work is partially supported by the National Natural Science Foundation of China (12071162), the Natural Science Foundation of Fujian Province (No. 2021J01302) and the Fundamental Research Funds for the Central Universities (No. ZQN-802).
Author information
Authors and Affiliations
Contributions
ZH carried out the analytical studies and wrote the draft paper. ZW conceived the study and the overall manuscript design, and reviewed and revised the paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Ethics approval and consent to participate
Not applicable.
Consent for publication
Authors declare the consent for manuscript publication.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Huang, Z., Wen, Z. Persistence of Kink and Periodic Waves to Singularly Perturbed Two-Component Drinfel’d–Sokolov–Wilson System. J Nonlinear Math Phys 30, 980–995 (2023). https://doi.org/10.1007/s44198-023-00111-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s44198-023-00111-x
Keywords
- Singularly perturbed two-component Drinfel’d–Sokolov–Wilson system
- Kink waves
- Periodic waves
- Geometric singular perturbation theory
- Perturbation analysis
- Abelian integrals