
Abstract
This research aims to present an efficient numerical method to find approximate numerical solutions for ordinary differential equations (ODEs), specifically, the class of two-point boundary value models. This approach is predicated on coupling the shooting method and the decomposition method, which the method is named as Efficient Decomposition Shooting Method (EDSM). Thus, we provide the complete outline of EDSM, and thereafter, apply it to some test models, comprising linear and nonlinear models. Further, the results are then validated by comparing them to the exact solution and other computational methods. Thus, the proposed method performs excellently over its peers, and is found to converge rapidly to the available exact solution with a good precision.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Boundary value models of ordinary differential equations (ODEs) arise in modeling diverse science and technological processes. In particular, we discuss the two-point boundary value models in favor of their great relevance in many areas, including theoretical physics, engineering, optimization theory, fluid dynamics, and control theory to state but a few. Further, since not all ODEs possess exact analytical structures as solutions, through the application of analytical methods—which is usually the most common step taken to analyze a given differential equation; thus, the need to greatly search for an optimal numerical approach. In this regard, a lot of mathematicians have endeavored to propose various efficient numerical approaches that rapidly converge to the available exact solution with an utmost level of exactitude. In fact, we mention the shooting methods as one of such vibrant numerical approaches in this circle. Besides, as the method possesses so many benefits, nevertheless, the method is found to require an enormous computational space, as a drawback in obtaining perfect approximation, more particularly, with regard to nonlinear models. Furthermore, Attili et al. [1] presented an efficient method based on the use of the shooting method for solving a special two-point boundary value model, which takes the following pattern
subject to the following prescribed two-point boundary data \(w\left(a\right)=\alpha , w\left(b\right)=\beta ,\) where \(R\left(t\right)\), \({R}^{\prime}\left(t\right)\), and \(f\) are continuous functions, and the inverse operator was considered to take the following expression
In [2], Al-Zaid et al. utilized the technique to third-order linear equations and obtained good results. The present paper deploys the mixture of the shooting method and the ADM [3,4,5,6,7,8,9] to deeply examine the class of boundary value models accompanied by two-point boundary data. In this paper, we study the shooting technique with the standard ADM and the normal form of the inverse operator, which reduces the computing operations, for the general form of the second order BVPs for both linear and nonlinear cases. Moreover, it is relatable to mention here that due to the efficiency of the shooting method, many variants of the method exist, including its mixture with the finite difference method; likewise, there exist multiple shooting techniques, for more on this recap, one may read [10,11,12,13,14,15,16,17,18] and the references therein for more related studies. Therefore, as the coupling between the shooting method and the ADM is named as Efficient Decomposition Shooting Method (EDSM) in this study, the coupled EDSM method will be proposed for the linear and nonlinear models with different operator \(D\) and different inverse operator \({L}^{-1}.\) Also, we shall be demonstrating the method on some test models, and further establish a comparative study between the approximate solutions posed by the proposed method and those of the exact analytical solutions, together with others from the available open literature. Lastly, we would give some concluding notes about the performance of the proposed method.
2 Traditional ADM for solving initial value models
The traditional ADM [2,3,4,5,6,7,8,9] has been greatly used in the literature to tackle a variety of ODEs, featuring both boundary and initial value problems. Without much delay, the following generalized two-point second-order nonlinear (linear inclusive) ODEs is expressed as follows
together with the following two-point boundary data
the above model is the governing model of concern in this study. However, with the targeted coupling between the ADM and shooting method, we first present the ADM procedures on both the nonlinear and linear ODEs. Therefore, to present the method on nonlinear models, we make consideration to the following generalized initial value problem, derived from Eq. (2), and expressed in an operator form as follows
together with following initial data
More, in the above equations, L represents the highest-order derivative, which is a second-order linear operator, while \(R\) and \(N\) are the linear operator with order lower than that of L, and the nonlinear differential operator, respectively. In addition, \(g(x)\) is a prescribed forcing term; while \(\alpha\) and \(t\) are given real constants. Furtherer, consider the new differential operator from Eq. (3) as follows
together with its inverse linear operator \({L}^{-1}\), expressed using a twofold integral operator as follows
Additionally, according to the traditional ADM, the solution \(w(x)\) should be divided into the following infinite series of components
while the nonlinear term \(Nw\) is acquired using the subsequent recurrent formula
upon which the ADM reveals the recurrent components \({w}_{n}\left(x\right)\) as follows
that further yields the resulting approximate solution of the governing model in Eqs. (3) and (4) as \({w}_{m+1}=\sum_{n=0}^{m}{w}_{n}\left(x\right).\) In the same fashion, the linear case follows the same steps of the solution as in the nonlinear case, only that we should exclude the nonlinear term. Thus, we rewrite Eq. (3) in the following form
with the same initial data as
Therefore, the ADM posed the recurrent scheme of components \({w}_{n}\left(x\right)\) for Eqs. (9) and (10) as follows
that satisfies the linear model expressed in Eqs. (9) and (10) when the net sum of the components \({w}_{n}\left(x\right)\) is calculated as \({w}_{m+1}=\sum_{n=0}^{m}{w}_{n}\left(x\right) .\)
3 Proposed EDSM
A potential strategy that begins by converting the governing boundary value problem into a related system of starting value issues with defined initial value conditions is the shooting method [10,11,12,13,14,15,16,17,18]. The initial value problems are then solved by guessing these unknown initial conditions; the accuracy of the guesses for the missing initial conditions is then determined by comparing the calculated value of the dependent variable with the given value at the terminal point. Additionally, if these two values don't match, a fresh value should be estimated again until the two agree on a number with a predetermined level of accuracy. Indeed, none of the resulting initial value models is solved exactly; so, the solution will be approximately determined using the one-step methods or multistep methods or even directly upon using the ADM [2,3,4,5,6,7,8,9] as in the present study.
The shooting method theoretical treatment of convergence has been examined in [19, 20]. Granas et al. conducted a convergence analysis. The weaker hypotheses necessary to ensure the boundary value problem's existence and uniqueness were the first ones they analyzed. The analysis established the shooting method's convergence without requiring any extra limitations.
It must be demonstrated that the initial value problem has a unique solution defined on the interval in order for the previously mentioned numerical approach to be workable. Noteworthy, however, is the fact that a number of researchers have already demonstrated the Adomian series convergence such as [21].
In fact, shooting techniques are highly appropriate and advantageous for a variety of problems. For the solution of initial value difficulties, they rely on dependable and easily accessible procedures. The shooting method for boundary value problems uses a very small amount of computer storage compared to global approaches; the discretized version's mesh is typically automatically tuned to the behavior of the solution, and subject to the method’s inherent limitations, increasing the accuracy of a solution is simple. The study bounds on the shooting method inherent error in [22].
3.1 Linear case
Let us make consideration to the linear ODEs of second order that follows
together with the following two-point boundary data
The second-order model mentioned above will now be divided into two initial value models depending on the shooting method’s application, and the boundary conditions listed in Eq. (13) will be changed to particular initial conditions for each initial value problem, say
and
Additionally, Eq. (14) can be expressed using operator notation as follows
once \({L}^{-1}\) is applied previously supplied in Eq. (6) to Eq. (18), one obtains.
such that \(L{\phi }_{1}\left(x\right)=0.\) Next, as in the ADM steps, the components \({u}_{n}\left(x\right)\) are recurrently determined as follows
Additionally, the \(m + 1\) -term approximant is regarded for the purposes of numerical computation as
Likewise, with reference to the second initial value model provided by Eq. (16), we can similarly calculate
where the components \(v_{k} \left( x \right)\) are obtained in the same way as \({v}_{0}= {\phi }_{2}\left(x\right),\)
Subsequently, we construct \(z\) as follows
where \(\theta\) is a fixed number.
Hence, if we assume \(u\left(x\right)\) and \(v\left(x\right)\) to stand for the solutions of the second-order linear initial value models given in Eqs. (14)–(15) and (16)–(17), respectively, then, we define
where \(z(x)\) represents the solution to the second-order linear boundary value problem given in Eqs. (12)–(13).
3.2 Nonlinear case
Let us make consideration to the nonlinear ODEs of second order that follows
together with the following specified two-point boundary data
Nevertheless, since the shooting method procedures for solving both the cases of linear and nonlinear models remain the same, with the exception of the fact that the solution of the nonlinear model could not be represented as a linear combination of the solutions of the resulting initial value models. As such, the solution of the original boundary value model is approximated by that of the system of the resulting initial value problems, having t as a parameter. So, we will convert the second-order boundary value model into a system of initial value problems, where we will be replacing the boundary data with specific initial conditions. In this regard, we consider the model to take the following form
where the initial data is now prescribed as follows
However, as the mixture of the traditional ADM with the shooting method is to be employed to solve the above model in Eqs. (28) and (29), we start off by selecting the parameters \(t = {t}_{k}\) in such a way that the following limit
is guaranteed, where \(w\left(x,{t}_{k}\right)\) presents the solution to the initial value problem in Eqs. (28), (29) with \(t ={t}_{k}\), while \(w(x)\) is the solution of the original boundary value model in Eqs. (26), (27). For that reason, the expected solution to the resulting first initial value problem is required in a sequence form after constraining initial guess \({t}_{0}=\frac{\beta -\alpha }{b-a}\). Therefore, we may find the value of \({t}_{1}\) as follows by applying Newton's approach
Next, to determine the value of \(\frac{dw}{dt}\left(b,{t}_{0}\right)\), we scale the initial value problem expressed in Eqs. (28) and (29) to depend on \(x\) and \(t\) variables as follows
with the initial data
We then proceed to differentiate Eq. (32) and (33) partially in \(t\). So, if we let \(z(x,t)=\frac{\partial w}{\partial t}\left(x,t\right)\), the above model now becomes
with
Lastly, the initial value problem given above will be directly solved at \({t}_{k}\) using the traditional ADM, which gives \(\frac{dw}{dt}\left(b,{t}_{0}\right)=z(x,{t}_{0})\). Also, to determine the complete sequence, the guessed points \({t}_{k}\) for \(k=2, 3,\dots\) together with the nonlinear function \(y\left(b,t\right)-\beta =0\) are thus determined through the utilization of the Secant iterative method as follows
Notably, the numerical process in the present study is to be ended upon attainment of the following stopping criteria
4 Numerical examples
This section shows how the suggested methodology applies to some chosen test models, allowing it to be examined for both second-order linear and nonlinear two-point boundary value models. Precisely, two linear and two nonlinear models are considered as test models, where the methodology is fully implemented on the first and third examples, for the linear and nonlinear cases, respectively. To further assess the effectiveness of the developed scheme, the method is compared to a combination of the shooting method and the fourth-order Runge–Kutta approach. We will also contrast our findings with those of other numerical techniques found in the literature [1, 23,24,25,26,27,28,29,30,31,32,33,34,35,36].
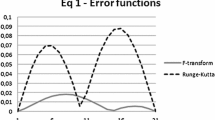
In addition, we offer some supporting Tables 1, 2, 3, 4, 5, 6, 7, 8 and Figs. 1, 2, 3, 4 that show the absolute error differences between the corresponding exact analytical solutions and, conversely, the suggested numerical solutions utilizing EDSM (\({{\varvec{E}}}_{\mathbf{E}\mathbf{D}\mathbf{S}\mathbf{M}})\) and further verified by the fourth-order Runge–Kutta method \(({{\varvec{E}}}_{\mathbf{S}\mathbf{R}\mathbf{K}\mathbf{M}4})\).

Graphical comparison, depicting the exact and contending approximate solutions with \(h=0.1\)

Graphical comparison, depicting the exact and contending approximate solutions with \(h=0.1\)

Graphical comparison, depicting the exact and contending approximate solutions with \(h=0.1\)

Graphical comparison, depicting the exact and contending approximate solutions with \(h=0.05\)
Example 1
We make consideration to the inhomogeneous second-order linear two-point boundary value problem as follows [23,24,25,26,27]
that satisfies the following exact analytical solution \(w\left( x \right) = x\left( {1 - e^{x - 1} } \right)\)
We now consider the following two initial value problems based on the proposed EDSM
and
Equations (38) and (39) operator versions can be expressed as
and
After applying \(L^{ - 1}\) to both sides of Eq. (42) and using the conditions given in Eq. (39), we obtain
Likewise, applying \({L}^{-1}\) to both sides of Eq. (43) and using the conditions given in Eq. (41), we obtain
Furthermore, by breaking down the corresponding solutions in Eqs. (44) and (45) using the conventional ADM process, the corresponding recursive relationships are thus derived as follows
and
Then, the solutions of the initial value models in Eqs. (38, 39, 40, 41) are thus obtained from the above schemes upon taking the respective series summations. Finally, the approximate solution \(z\left(x\right)\) \(\mathrm{with } \hfill m=10\hfill and \hfill m=20,\) when \(h=\frac{1}{10} \hfill and \hfill h=\frac{1}{20}\), respectively, will be computed in Table 1 and 2 by using
where \({x}_{k}=kh\) for \(k=\mathrm{0,1},\dots ,m\).
The absolute error difference between the proposed \({{\varvec{E}}}_{\mathbf{E}\mathbf{D}\mathbf{S}\mathbf{M}}\) solution and the exact analytical solution, which was further confirmed with \({{\varvec{E}}}_{\mathbf{S}\mathbf{R}\mathbf{K}\mathbf{M}4}\), is presented in Table 1. Table 2 demonstrates that, when compared to the approaches employed in [23,24,25,26,27] and the SRKM4, EDSM is the most proficient strategy for solving the governing model. Once more, we depict the exact analytical and competing approximation answers in Fig. 1, where the solutions exhibit perfect agreement.
Example 2
We make consideration to the inhomogeneous second-order linear two-point boundary value problem as follows [28,29,30,31]
that satisfies the following exact analytical solution.
where
Thus, without loss of generality, the approximate solution \(z\left(x\right)\) with \(m=10\) and \(m=20\) is obtained for \({x}_{k}=kh\) for \(k=\mathrm{0,1},\dots ,m\) using the following scheme
see also Table 3 and 4 for the numerical results.
The absolute error difference between the proposed solution \({{\varvec{E}}}_{\mathbf{E}\mathbf{D}\mathbf{S}\mathbf{M}}\), and the exact analytical solution, which was further confirmed with \({{\varvec{E}}}_{\mathbf{S}\mathbf{R}\mathbf{K}\mathbf{M}4}\), is presented in Table 3. Table 4 demonstrates that, when compared to the approaches in references [28,29,30,31] and SRKM4, EDSM is the most proficient strategy for resolving Example 2. Furthermore, we show the precise analytical and approximative solutions in Fig. 2, where a perfect agreement between the solutions is observed.
Example 3
We make consideration to the inhomogeneous second-order nonlinear two-point boundary value problem as follows [32,33,34]
that satisfies the following exact analytical solution
First, we consider the following initial value problems are
and
Moreover, the operator forms of Eqs. (47) and (48) can be expressed as follows
And
On applying \({L}^{-1}\) to both sides of Eq. (49) and (50), and upon using the respective initial conditions, then the recursive relationships are
and
where the solution Eq. (47) with \(m=10\) and \(m=20\) can be computed from the following series
Lastly, if \(tolerance={10}^{-15}\) is considered, that is, when \(|w\left(b,{t}_{k}\right)-\beta |\le {10}^{-15}\), then \(w\left(x,{t}_{k}\right)\) reveals the solution of the governing model earlier given in Eq. (46) with \(t ={t}_{k}\); see Table 5 and 6 for the numerical results.
The absolute error difference between the proposed solution \({{\varvec{E}}}_{\mathbf{E}\mathbf{D}\mathbf{S}\mathbf{M}}\) and the exact analytical solution is presented in Table 5 and is further confirmed with \({{\varvec{E}}}_{\mathbf{S}\mathbf{R}\mathbf{K}\mathbf{M}4}\). Additionally, based on Table 6 comparison with the findings presented in [32,33,34] and SRKM4, it is evident that EDSM is the most proficient method for solving the current model. Furthermore, Fig. 3 shows the precise analytical and approximative answers; a high degree of agreement between the solutions is evident.
Example 4
We make consideration to the homogeneous second-order nonlinear two-point boundary value problem as follows [1, 35, 36]
that satisfies the following exact analytical solution \(w\left(x\right)=1/\left(x+1\right)\).
We consider the two initial value problems with initial conditions are
and
Then the recursive relationships are
and
Further, from the above equations, \({A}_{n}\) and \({B}_{n}\) represent the Adomian polynomials in favor of the nonlinear terms \({y}^{3}\) and \(yy{\prime}\), respectively. Moreover, the latter equations reveal the solution of Eq. (52) with \(m=10\) and \(m=20\) via the following series
Lastly, if \(tolerance={10}^{-30}\) is considered, that is, when \(|w\left(b,{t}_{k}\right)-\beta |\le {10}^{-30}\), then \(w\left(x,{t}_{k}\right)\) reveals the solution of the governing model earlier given in Eq. (51) with \(t ={t}_{k}\); see Table 7 and 8 for the numerical results.
The absolute error difference between the exact analytical solution and the suggested solution \({{\varvec{E}}}_{\mathbf{E}\mathbf{D}\mathbf{S}\mathbf{M}}\), which is further verified with \({{\varvec{E}}}_{\mathbf{S}\mathbf{R}\mathbf{K}\mathbf{M}4}\), is shown in Table 7. Table 8 further shows that, when compared to the approaches in [1, 35, 36] and SRKM4, EDSM is the most competent technique for solving the model under consideration. Additionally, Fig. 4 displays a good degree of exactitude in the graphical representation of the exact analytical and approximation solutions.
5 Conclusions
In conclusion, a numerical method has been introduced in the present study to efficiently tackle the class of second-order ODEs, more specifically, the two-point boundary value problems of both the linear and nonlinear forms. After being used on some test problems, the suggested approach performed better than the compared numerical methods. As such, we may conclude that our approach is robust, low-cost, and applicable to various physical models. Finally, we have provided graphical illustrations and tables to visualize the efficacy of the proposed method. In practical applications, we advise applying the Efficient decomposition shooting method to solve boundary value problems because its error is quite slight compared to other methods. These approaches are appealing since most computers have reasonably good subroutines for solving initial value models numerically.
Data availability
We do not analyze or generate any datasets, because our work proceeds within a theoretical and mathematical approach.
References
Attili BS, Syam MI (2008) Efficient shooting method for solving two point boundary value problems. Chaos Solitons Fractals 35(5):895–903
Al-Zaid N, Alzahrani K, Bakodah H, Al-Mazmumy M (2023) Efficient decomposition shooting method for solving third-order boundary value problems. Int J Mod Nonlinear Theory Appl 12(3):81–98
Adomian G (2013) Solving frontier problems of physics: the decomposition method, vol 60. Springer Science & Business Media
Al-Mazmumy M, Al-Mutairi A, Al-Zahrani K (2017) An efficient decomposition method for solving bratu’s boundary value problem. Am J Comput Math 7(1):84–93
Abushammala MB (2014). Iterative methods for the numerical solutions of boundary value problems (Doctoral dissertation).
Hendi FA, Bakodah HO, Almazmumy M, Alzumi H (2012) A simple program for solving nonlinear initial value problem using Adomian decomposition method. Int J Res Rev Appl Sci 12(3):397–406
Bakodah HO (2012) The appearance of noise terms in modified Adomian decomposition method for quadratic integral equations.
AL-Zaid N, AL-Refaidi A, Bakodah H, AL-Mazmumy M (2022) Solution of second-and higher-order nonlinear two-point boundary-value problems using double decomposition method. Mathematics 10(19):3519
AL-Mazmumy M, Alsulami AA, Bakodah HO, Alzaid N (2022) Modified Adomian method through efficient inverse integral operators to solve nonlinear initial-value problems for ordinary differential equations. Axioms 11(12):698
Javeed S, Shabnam A, Baleanu D (2019) An improved shooting technique for solving boundary value problems using higher order initial approximation algorithms. Punjab Uni J Math 51(11):101–113
Ha SN (2001) A nonlinear shooting method for two-point boundary value problems. Comput Math Appl 42(10–11):1411–1420
Arefin MA, Nishu MA, Dhali MN, Uddin MH (2022) Analysis of reliable solutions to the boundary value problems by using shooting method. Math Probl Eng. https://doi.org/10.1155/2022/2895023
Ahmad N, Charan S (2019) A comparative study of numerical solutions of second order ordinary differential equations with boundary value problems by shooting method & finite difference method. Int J Stat Appl Math 4(1):18–22
Ramana KMV (2019) Analysis of numerical solution of second order ordinary differential equation. J Archit Technol XI(X):1–24
Edun IF, Akinlabi GO (2021) Application of the shooting method for the solution of second order boundary value problems. J Phys Conf Ser 1734(1):012020
Diekhoff HJ, Lory P, Oberle HJ, Pesch HJ, Rentrop P, Seydel R (1976) Comparing routines for the numerical solution of initial value problems of ordinary differential equations in multiple shooting. Numer Math 27(4):449–469
Manyonge AW, Opiyo R, Kweyu D, Maremwa JS (2017) Numerical solution of non-linear boundary value problems of ordinary differential equations using the shooting technique. J Innov Technol Educ 4(1):29–39
Singh J (2022) Shooting method for solving two-point boundary value problems in ODEs numerically. arXiv preprint arXiv:2208.13221.
Granas A, Guenther RB, Lee JW (1979) The shooting method for the numerical solution of a class of nonlinear boundary value problems. SIAM J Numer Anal 16(5):828–836
Ascher UM, Mattheij RM, Russell RD (1995) Numerical solution of boundary value problems for ordinary differential equations. Society for Industrial and Applied Mathematics
Cherruault Y (1989) Convergence of Adomian’s method. Kybernetes. https://doi.org/10.1108/eb005812
Bailey PB, Shampine LF (1968) On shooting methods for two-point boundary value problems. J Math Anal Appl 23(2):235–249
Tat CK, Majid ZA, Suleiman M, Senu N (2012) Solving linear two-point boundary value by direct Adams Moulton method. Appl Math Sci 6(99):4921–4929
Heilat AS, Zureigat H, Hatamleh RE, Batiha B (2021) A New spline method for solving linear two-point boundary value problems. European J Pure Appl Math 14(4):1283–1294
Latif B, Abdul Karim SA, Hashim I (2021) New cubic b-spline approximation for solving linear two-point boundary-value problems. Mathematics 9(11):1250
Ahmed J (2015) An efficient method for second order boundary value problems. Res J Math Stat 7(1):1–5
Hasni, M. M., Majid, Z. A., & Senu, N. (2015, August). Direct 4-point 1-step block method for solving Dirichlet boundary value problem. In 2015 International Conference on Research and Education in Mathematics (ICREM7) (pp. 76–80). IEEE.
Omar Z, Adeyeye O (2016) Solving two-point second order boundary value problems using two-step block method with starting and non-starting values. Int J Appl Eng Res 11(4):2407–2410
Jator SN, Li J (2009) Solving two-point boundary value problems by a family of linear multistep methods. Neural Parallel Sci Comput 17(2):135
Yakusak NS, Adeniyi RB (2022) Hybrid Falkner-type block methods for solution of second order boundary value problems. Studies 5(1):67–81
Ala O, Ying TY, Saaban A (2016) Quintic spline method for solving linear and nonlinear boundary value problems. Sains Malaysiana 45(6):1007–1012
Pirabaharan P, Chandrakumar RD, Hariharan G (2016) Reliable wavelet based approximation method for some nonlinear differential equations. Appl Math 10(2):719–727
Abd-Elhameed WM, Youssri YH, Doha E (2015) A novel operational matrix method based on shifted Legendre polynomials for solving second-order boundary value problems involving singular, singularly perturbed and Bratu-type equations. Math Sci 9(2):93–102
Tagian HT, Abd-Elhameed WM, Moatimid GM, Youssri YH (2022) A modified shifted Gegenbauer polynomials for the numerical treatment of second-order BVPS. Natural sciences Publishing Cor. 11(1):1–12
Heilat AS, Ismail AIM (2016) Hybrid cubic b-spline method for solving Non-linear two-point boundary value problems. Int J Pure Appl Math 110(2):369–381
Rashidinia J, Nabati M, Barati A (2017) Sinc-Galerkin method for solving nonlinear weakly singular two point boundary value problems. Int J Comput Math 94(1):79–94
Funding
The authors declare that no funds, grants, or other support were received during the preparation of this manuscript.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by Mrs. Kholoud A. Alzahrani, Prof. H. O. bakodah, Dr. N. A. Alzaid, and Dr. Mariam H. Almazmumy. The first draft of the manuscript was written by. Kholoud A. Alzahrani and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest exists for all participating authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bakodah, H.O., Alzahrani, K.A., Alzaid, N.A. et al. Efficient decomposition shooting method for tackling two-point boundary value models. J.Umm Al-Qura Univ. Appll. Sci. (2024). https://doi.org/10.1007/s43994-024-00162-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43994-024-00162-w