
Abstract
Haque’s approach with Mickens’ iteration method has been used to obtain the modified analytical solutions of the nonlinear jerk oscillator, including displacement time velocity and acceleration. The jerk oscillator represents the features of chaotic behavior in numerous nonlinear phenomena, cosmological analysis, kinematical physics, pendulum analysis, etc., such as electrical circuits, laser physics, mechanical oscillators, damped harmonic oscillators, and biological systems. In this paper, we have used different harmonic terms for different iterative stages using the truncated Fourier series. A comparison is made between the iteration method, the improved harmonic balance method, and the homotopy perturbation method. After comparison, the suggested approach has been shown to be more precise, efficient, simple, and easy to use. Furthermore, there was remarkable accuracy in the comparison between the numerical results and the generated analytical solutions. For the third approximate period, the maximum percentage error is 0.014.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Mathematics is integrally involved in every aspect of our life. Especially in every aspect of our real life, mathematics has applications. Differential equations (DE) are used as tools to solve many difficult problems in our real life. With the help of differential equations we can find the formula to solve many important problems in many areas of our life like mental, physical, medical principles etc. Differential equations are linear, non-linear, dependent or independent. Non-linear differential equations (NLDE) play many important roles in the area of science and engineering.
Solving linear differential equations (LDEs) is rather simple. But, due to the nonlinear terms are present, it is exceedingly complicated and challenging to solve nonlinear differential equations (NLDEs). Due to this fact, it is common practice to solve nonlinear differential equations by converting them into linear differential equations from a variety of perspectives. But to transform all NLDEs into LDEs is not often feasible. In these situations, there are some key methods that can be used to solve the NLDEs without transforming them into LDEs, including the perturbation method, the harmonic balance method, and the iteration method.
The perturbation method is appropriate for solving nonlinear differential equations where the nonlinearities are small, whereas the harmonic balance method is appropriate for solving nonlinear differential equations where the nonlinearities are strong, and the iteration method is appropriate for solving nonlinear differential equations with both strong and small nonlinearities. Mickens was the first to suggest the Harmonic Balance Method (HBM) in 1984. Then Gottlieb, Hu & Tang, and other mathematicians contributed to develop the method. Iteration Method is a powerful analytical method that can be solved truly nonlinear differential equations. R. E. Mickens introduced the iteration method for the first time in 1987. The HBM and the iteration method are fundamentally different from each other. As for instance in the harmonic balance method, the variable has to be initially gauged up to a certain label but cannot be changed later. But it is overcome in iteration method. At different stages in the iteration method we can even take different types of harmonics for our advantage. For example if we are working with 5th harmonic and for our convenience we can also work with 3rd harmonic at the next stage. So it is an advantage for us that we do not see this kind of limitation in the case of iteration method as a method of perturbation and harmonic balance.
The third-order derivative of displacement is called ‘jerk’ and it was first introduced by Schot [26] in 1978. In other words jerk is named as the rate of change of acceleration. Clearly, considering time, first, second and third derivative are respectively referred to velocity, acceleration and jerk. This type of equation is called nonlinear jerk equation.
Jerk equation form is generally
where \(J(x,\dot{x},\ddot{x})\) denotes the jerk functions.
Among the researchers who presented analytical solutions to these oscillators, Gottlieb [6] used the inferential periodic solution and the lowest order harmonic balance method for the corresponding angular frequency. Gottlieb found that solution and the angular frequency was not accurate enough. To solve the nonlinear jerk equations and their higher order approximations, Wu et al. [8] and Leung et al., [7] conducted an advanced HBM and a residual harmonic balance method respectively. The objective of their method was to obtain accurate results for large amplitude oscillators. To describe higher order probabilistic solutions of the non-linear jerk equation Ma et al. [5] and Hu [1] conducted the homotopy perturbation method. But their results were not good. Ramos [2,3,4] presented some procedures to solve nonlinear jerk equations. It has been observed that the second reduction procedure yields good solutions in the case of unit or tends to unit initial velocities. In [2], Ramos provided very good results for the first and second differential equations that were obtained by four approximate methods based on order reduction; this result was as good to or more good than the results obtained by the parameter perturbation method. A modified method of Mickens for a nonlinear jerk equation was presented by Hu et al. [18], and Newton's method of approximate angular frequency helped to obtain the second order. With cubic nonlinearities, a residual harmonic balance method has been introduced by Leung et al. [7] for describing the boundary cycles of the parity. Recently Haque [9] introduced a new method of direct iteration [19] with a view to solving the nonlinear jerk oscillator, which contained acceleration and velocity of displacement time. Mohammadian et al. [21], Mohammadian & Shariati [22], Mohammadian & Akbarzade [23], Mohammadian [24, 25], Akgül & Hijaz [27], Luqman et al. [28], Safdar et al. [29], Bansi et al. [30], Partohaghighi et al. [31], Akgül et al.[32], Chen, & Xing [33], Cao et al. [34], Gao et al. [35], Chen et al. [36], Liu et al. [37], Yin et al. [38], Plastino et al. [39] solved various nonlinear problems using some effective and important methods.
Some restrictions have been placed on the mathematical form of the superlative oscillator for achieving a periodic solution for jerk-oscillators. Gottlieb [6] taken into consideration only the third order nonlinear function \(\dot{x}\ddot{x}^{2}\).
Based on invariance of time-reversal and space-reversal, generalized jerk function is written following the form [6] because it carries only third order nonlinearity
Over dot’s are denoted by derivatives with respect to time \({\text{t}}\) and the parameters \(\alpha ,\,\,\beta ,\,\,\gamma ,\,\,\delta\) and \(\varepsilon\) the actual constant is given. Any one or two of these parameters (aside from \(\alpha \) and \(\delta \) simultaneously) may be set to unity by rescaling \(x\) and/or \(t\) to produce standard equations with fewer control parameters appropriate for more in-depth analysis. (Of course, a parameter shouldn't be "normalized" in this way if the behavior of a specific term that has a very small coefficient needs to be examined.)
The relevant prerequisites are:
Three initial conditions in Eq. (4) periodic requirements must be fulfilled. Here at least one of \(\alpha ,\,\,\beta ,\,\,\gamma ,\,\,\delta\) and \(\varepsilon\) should be non-zero.
In this article, it has been presented Haque’s approach with Mickens’ iteration method to obtain the approximate analytical solutions of the nonlinear jerk oscillator including displacement time velocity and acceleration. Following the application of the suggested method, more accurate, workable, and compatible results were discovered. Effective simplification has been discovered from the change, ensuring that the solution is free of algebraic complications. The computed results produced by the suggested method have been compared to the exact result as well as the outcomes of other approaches that are currently in use. The results obtained exhibit a rapid convergence towards the exact values, with errors far less than those found in the literature.
2 The approach
Let's have a look at a nonlinear oscillator that is described by
where the over-dots represent the time-related differentiation, t, over dash denotes integration with respect to time. Also Ω is the frequency. By adding \(\Omega^{2} x\) of both sides of Eq. (5), we have
Following [17], we formulate the iteration scheme as
combined with
Herein satisfies the conditions
The requirement that secular words shouldn't appear in the solution at any point during the iteration determines \(\Omega_{k}\). For further information, see [18]. The solutions are provided in the following order: \(x_{0} (t),\,x_{1} (t),\,.......\). The approach can be applied to any level of approximation, but the solution is limited to a lower order, typically the second [15] due to increased algebraic complexity.
3 Process for a solution
We have measured the function \(\dot{x}\ddot{x}^{2}\) containing velocity times acceleration squared i.e. jerk function.
The model of nonlinear jerk oscillator is.
Let \(\dot{x} = y\) where is the space variable \(y(t)\). Then the Eq. (9) becomes.
Apparently, Eq. (10) becomes
Now the iteration scheme is according to.
Equation (7) becomes.
where \(\theta = \Omega \,t\), for k = 0 the Eq. (12) becomes.
Substituting the right-hand side of Eq. (14) into the elementary function Eq. (13) and expanding it into a cosine series, we get
We must remove \(\cos \theta\) from the right side of the Eq. (15) to evade secular terms in the solution, and we get
After solving Eq. (15) and meeting the initial requirement \(y_{1} (0) = A\) we have,
It is necessary to determine \(\Omega_{1}\) in relation to this first approximation of the solution to Eq. (11). The solution will reveal the value of \(\Omega_{1}\).
where \(u={\Omega }_{1}\)
Substituting \(y_{1}\) into the Eq. (19) from Eq. (18) and then trigonometrically expanding we obtain
where
We must remove \(\cos \theta\) from the right side of the Eq. (20) to evade secular terms in the solution, and we get
Satisfying the initial condition \(y_{2} (0) = A\), after solving equation and we have
It is necessary to determine \({\Omega }_{2}\) in relation to this second approximation of the solution to Eq. (10). The solution will reveal the value of \({\Omega }_{2}\)
where \(v={\Omega }_{2}\)
Substituting \(y_{2}\) from Eq. (23) into the Eq. (24) and then expanding in a trigonometric reduce we get,
where
We must remove \(\cos \theta\) from the right side of the Eq. (25) to evade secular terms in the solution, and we get
Satisfying the initial condition \(y_{3} (0) = A\), after solving Eq. (25) we have
where
It is necessary to determine \({\Omega }_{3}\) in relation to this second approximation of the solution to Eq. (10). The solution will reveal the value of \({\Omega }_{3}\)
Similarly the method can be obtained by higher order approximation and respectively Eqs.(17, 22, 27),.… represent the approximate frequencies of the oscillator (10).
4 Findings and discussion
The proposed method is advanced based on Mickens’ iteration method [20] for solving several classes of nonlinear jerk equations. To compare the obtained results to exact results and others existing results obtained from different methods of the nonlinear jerk equations, and to calculate the percentage error (prevail by %) of our obtained results compared to the exact results, we have used the following formula
where the various approximate periods obtained by \(T_{0} ;k = 0,1,2.....\) is illustrated the modified method and the oscillator's exact period, denoted by the letter h, is indicated \(Te\).
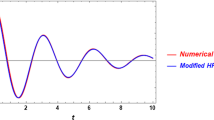
We now want to show a comparison of oscillator results. That is, the velocity of the displacement time is for the acceleration of time and the jerk function containing the velocity. Nowadays, without the iteration method, Ramos [2], Ma et al. [5] and Gottlieb [6] have found approximate solutions, frequency and time approximations to the nonlinear jerk oscillators (given in Eq. 10). Here we have used modified iteration method to get neighboring solutions, which is quite simple. In most cases our results yielded better results than those obtained by other researchers and in many cases almost matched other researchers. Here we have considered the first, second and third nearest frequencies \(\Omega_{0} ,\Omega_{1}\) and \(\Omega_{2}\) respectively and corresponding periods are \(T_{0} ,T_{1}\) and \(T_{2}\).Our results are shown in Tables 1 and 2. Besides we have also provided the results of Gottlieb [6], Ma et al. [5] and Ramos [2] respectively to compare the estimated frequencies. A graph is provided in the Fig. 1 where the comparative graph of our obtained result and exact result is presented.

The third-order approximate solutions for A = 1 of \(\dddot x + \dot{x} = x\dot{x}\ddot{x}\) compare with the corresponding exact solution
5 Conclusion
In this study, the majority of solutions are synthesized to be much better. The modified solutions demonstrate that the modification is more accurate than other existing approaches and is valid for the large amplitude of oscillation in the jerk system. The adopted modification is determined to be stable, efficient, and compliant. Additionally, it offers a significant number of appropriate solutions to the nonlinear jerk equations that occur in applied mathematics, mathematical physics, and other engineering disciplines, including mechanical, electrical, and space engineering. After considering every angle of all the ways examined in Table 2, we get to the conclusion that the adopted method is much superior to each equivalent level demonstrated by other methods. We concluded by summarizing:
-
(i)
The suggested approach is an effective strategy for examining random oscillations. A severely nonlinear oscillator's approximate frequencies and related periodic solutions can be easily and effectively obtained using this technique.
-
(ii)
The suggested method outperforms previous existing findings in terms of approximate frequencies and related periodic solutions as well as high validity for both small and large beginning oscillation amplitudes.
-
(iii)
The maximum percentage error for the third order approximate period of nonlinear Jerk oscillator containing displacement time velocity and time acceleration is 1.40 e-1.
-
(iv)
It has been determined that the majority of researchers have used the procedure to alter the method in order to enhance the solutions in the iteration method, but we have focused on rearranging the leading oscillators with their own merit and selecting appropriate harmonic terms from trigonometric expansion. These two have been determined to be equally important for obtaining better answers.
-
(v)
The suggested strategy also yields outstanding results for higher-order, while most strategies yield good results for first-order answers but not good results for higher-order.
Data availability
This study was not supported by any data.
References
Hu H (2008) Perturbation method for periodic solutions of nonlinear jerk equations. Phys Lett A 372:4205–4209
Ramos JI (2010) Approximate methods based on order reduction for the periodic solutions of nonlinear third-order ordinary differential equations. Appl Math Comput 215:4304–4319
Ramos JI, Garcia-Lopez CM (2010) A volterra integral formulation for determining the periodic solutions of some autonomous, nonlinear, third-order ordinary differential equations. Appl Math Comput 216:2635–2644
Ramos JI (2010) Analytical and approximate solutions to autonomous, nonlinear, third-order ordinary differential equations. Nonlinear Anal Real 11:1613–1626
Ma X, Wei L, Guo Z (2008) He’s homotopy perturbation method to periodic solutions ofnonlinear jerk equations. J Sound Vib 314:217–227
Gottlieb HPW (2004) Harmonic balance approach to periodic solutions of nonlinear jerk equation. J Sound Vib 271:671–683
Leung AYT, Guo Z (2011) Residue harmonic balance approach to limit cycles of non-linear jerkequations. Int J Nonlinear Mech 46:898–906
Wu BS, Lim CW, Sun WP (2006) Improved harmonic balance approach to periodic solutions ofnonlinear jerk equations. Phys Lett A 354:95–100
Haque BMI (2013) A new approach of Mickens’ iteration method for solving some nonlinear jerk equations. Global J Sci Front Res Math Decision Sci 13:87–98
Haque BMI (2014) A new approach of Mickens’ extended iteration methodfor solving some nonlinear jerk equations. Br J Math Comput Sci 4:3146–3162
Haque BMI, Alam MS, Rahmam M (2013) M, “Modified solutions of some oscillators by iteration procedure.” J Egyptian Math Soc 21:68–73
Haque BMI, Bostami MB, Hossain MMA, Hossain MR, Rahman MM (2015) Mickens iteration like method for approximate solution of the inverse cubic nonlinear oscillator. Br J Math Comput Sci 13:1–9
Haque BMH, Bostami BM, Hossain MR (2016) Analytical approximate solutions to the nonlinear singular oscillator: an iteration procedure. Br J Math Comput Sci 14(3):1–7
Haque BMI, Hossain MMA (2019) A modified solution of the nonlinear singular oscillator by extended iteration procedure. J Adv Math Comput Sci 34:1–9
Haque BMI, Flora SA (2020) On the analytical approximation of the quadratic nonlinear oscillator by modified extended iteration method. Appl Math Non linear Sci 6:1–10
Haque BMI, Hossain MI (2021) An analytical approach for solving the nonlinear jerk oscillator containing velocity times acceleration-squared by an extended iteration method. J Mech Continua Math Sci 16(2):35–47
Haque BMI, Hossain MMA (2021) An effective solution of the cube- root truly nonlinear oscillator: extended iteration procedure. Int J of Differ Equ 2021:1–9
Hu H, Zheng MY, Guo YJ (2010) Iteration calculations of periodic solutions to nonlinear jerkequations. Acta Mech 209:269–274
Mickens RE (2010) Truly nonlinear oscillations. World Scientific
Mickens RE (1987) Iteration Procedure for determining approximate solutions to nonlinear oscillator equation. J Sound Vib 116:185–188
Mohammadian M, Pourmehran O, Ju P (2018) An iterative approach to obtaining the nonlinear frequency of a conservative oscillator with strong nonlinearities. Int Appl Mech 54(4):470–479
Mohammadian M, Shariati M (2017) Approximate analytical solutions to a conservative oscillator using global residue harmonic balance method. Chin J Phys 55(1):47–58
Mohammadian M, Akbarzade M (2017) Higher-order approximate analytical solutions to nonlinear oscillatory systems arising in engineering problems. Arch Appl Mech 87(8):1317–1332
Mohammadian M (2017) Application of the global residue harmonic balance method for obtaining higher-order approximate solutions of a conservative system. Int J Appl Comput Math 3(3):2519–2532
Mohammadian M (2017) Application of the variational iteration method to nonlinear vibrations of Nano beams induced by the van der Waals force under different boundary conditions. Euro Phys J Plus 132(4):169
Schot SH (1978) Jerk: the time rate of change of acceleration. Am J Phys 46(11):1090–1094
Akgül A, Ahmad H (2020) Reproducing kernel method for Fangzhu’s oscillator for water collection from air. Math Methods Appl Sci 2020:1–10
Luqman, Muhammad, et al (2020) An efficient computational approach for fractional model of blood flow in oscillatory arteries with thermal radiation and magnetic field effects. Math Meth Appl Sci 1–10
Maimoona S et al. (2023) On study of flow features of hybrid nanofluid subjected to oscillatory disk. Int J Modern Phys B 2450356.
Bansi CDK et al (2018) Fractional blood flow in oscillatory arteries with thermal radiation and magnetic field effects. J Magn Magn Mater 456:38–45
Mohammad P et al (2021) New numerical simulation of the oscillatory phenomena occurring in the bioethanol production process. Biomass Convers Biorefinery 13(7):1–15
Akgül A et al (2021) A novel method for nonlinear singular oscillators. J Low Freq Noise, Vib Active Control 40(3):1363–1372
Chen Yu, Lü X (2023) Wronskian solutions and linear superposition of rational solutions to B-type Kadomtsev-Petviashvili equation. Phys Fluids 35:106613
Cao F et al (2023) Modified SEIAR infectious disease model for Omicron variants spread dynamics. Nonlinear Dyn 111(15):14597–14620
Gao Di, Lü X, Peng M-S (2023) Study on the (2+ 1)-dimensional extension of Hietarinta equation: soliton solutions and Bäcklund transformation. Phys Scr 98(9):095225
Chen S-J, Yin Y-H, Lü X (2024) Elastic collision between one lump wave and multiple stripe waves of nonlinear evolution equations. Commun Nonlinear Sci Numer Simul 130:107205
Liu K et al (2023) Expectation-maximizing network reconstruction and most applicable network types based on binary time series data. Physica D 454:133834
Yin Y-H, Lü X (2023) Dynamic analysis on optical pulses via modified PINNs: soliton solutions, rogue waves and parameter discovery of the CQ-NLSE. Commun Nonlinear Sci Numer Simul 126:107441
Plastino AR, Tsallis C, Wedemann RS (2024) A family of nonlinear diffusion equations related to the q- error function. Physica A 635:129494
Funding
The authors are not financially supported.
Author information
Authors and Affiliations
Contributions
Each author provided an equal contribution. Md. Ishaque Ali wrote the original draft of this manuscript, while B. M. Ikramul Haque supervised the writing and M. M. Ayub Hossain editing the manuscript. All authors have read and approved the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors affirm that they are impartial.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ali, M.I., Haque, B.M.I. & Hossain, M.M.A. Haque’s approach with mickens’ iteration method to find a modified analytical solution of nonlinear jerk oscillator containing displacement time velocity and time acceleration. J.Umm Al-Qura Univ. Appll. Sci. (2024). https://doi.org/10.1007/s43994-024-00148-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43994-024-00148-8