
Abstract
Gabor phase retrieval is the problem of reconstructing a signal from only the magnitudes of its Gabor transform. Previous findings suggest a possible link between unique solvability of the discrete problem (recovery from measurements on a lattice) and stability of the continuous problem (recovery from measurements on an open subset of \(\mathbb {R}^2\)). In this paper, we close this gap by proving that such a link cannot be made. More precisely, we establish the existence of functions which break uniqueness from samples without affecting stability of the continuous problem. Furthermore, we prove the novel result that counterexamples to unique recovery from samples are dense in \(L^2(\mathbb {R})\). Finally, we develop an intuitive argument on the connection between directions of instability in phase retrieval and certain Laplacian eigenfunctions associated to small eigenvalues.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Phase retrieval is a broad term encompassing many different inverse problems in imaging and signal processing, in which one seeks to reconstruct an object from measurements that arise as magnitudes of some quantities and lack phase information. While in imaging applications such as coherent diffraction imaging, this loss of phase information is due to the physics of the data acquisition process, in audio processing applications (cf. [26]) working with phaseless information is often a choice (to avoid recovery from noisy phases for example).
A particular instance of such a phase recovery problem is STFT phase retrieval, i.e. the recovery of a signal \(f \in L^2(\mathbb {R})\) from the magnitude of its short-time Fourier transform with respect to a window \(\psi \in L^2(\mathbb {R})\), which is defined as
STFT phase retrieval then refers to the problem of recovering f from \(| V_\psi f(x,\omega )|,\) up to a constant global phase factor (cf. Eq. (4)).
A popular window choice for the STFT is the Gauss function \(\varphi (t)=2^{1/4} \textrm{e}^{-\pi t^2}\), in which case one also refers to the STFT as the Gabor transform defined as
and the related STFT phase retrieval as Gabor phase retrieval.
In what follows, we will distinguish two setups: first, (continuous) Gabor phase retrieval problems, in which one seeks to recover f from \(\mathcal {A}_\Omega (f):=(|\mathcal {G} f (x,\omega )|)_{(x,\omega ) \in \Omega }\), for \(\Omega \) containing an open subset of \(\mathbb {R}^2\). Second, and more relevant in view of applications, sampled Gabor phase retrieval problems that deal with the recovery of f (up to global phase) from \(\mathcal {A}_\Lambda (f):= (|\mathcal {G} f (x,\omega )|)_{(x,\omega ) \in \Lambda }\), where \(\Lambda \) is a discrete subset of the time-frequency plane \(\mathbb {R}^2\).
It is by now well-known that f may be uniquely recovered (up to global phase) from \(\mathcal {A}_{\mathbb {R}^2}(f)\) and that this recovery is weakly but not strongly stable, i.e. the inverse phase retrieval operator, \(\mathcal {A}_{\mathbb {R}^2}^{-1}\), is continuous but not uniformly continuous [1]. In view of this insight, one can attempt to derive upper bounds for the local Lipschitz constants \(c_{\mathbb {R}^2}(f)\) for the inverse phase retrieval operator (cf. equation (20)).
Different further aspects of uniqueness and stability for Gabor phase retrieval have been studied over the past decade [2,3,4,5,6, 8, 12, 14,15,16,17,18,19,20,21, 23, 24, 27, 30,31,32]. Here, we want to highlight two findings that motivate the study of this paper:
-
Prior work by two authors of this paper on the (non-)uniqueness of sampled Gabor phase retrieval [4] shows that sampled Gabor phase retrieval does not enjoy uniqueness (for signals in \(L^2(\mathbb {R})\)) when the sampling set \(\Lambda \) is any (shifted) lattice in \(\mathbb {R}^2\). This is done by constructing explicit counterexamples:
Theorem 1
[4, Theorem 1 on p. 6] For any \(a>0\), the functions
do not agree (up to a constant global phase factor) and yet
As a consequence, a priori knowledge about the signals is necessary to restore uniqueness in sampled Gabor phase retrieval, and the search for proper subspaces of \(L^2(\mathbb {R})\) enjoying uniqueness from sampled Gabor transform magnitudes has attracted recent attention [5, 18, 30].
-
When the sampling lattice is sufficiently fine (i.e. \(a\rightarrow 0\)), the counterexamples \(h^\pm _a\) strongly resemble signals proposed by Grohs and one of the authors to demonstrate that continuous Gabor phase retrieval is severely ill-posed [2]: The magnitude measurements \(|\mathcal {G}h_a^\pm |\) are concentrated on disjoint domains in the time-frequency plane and this results in a source of instability for Gabor phase retrieval (i.e. the local Lipschitz constants \(c_{\mathbb {R}^2}(h^\pm _a)\) are large). More precisely, the local stability constant of the counterexamples increases as the sampling lattice becomes finer and finer (see Fig. 1).

The Gabor transform magnitudes \(|\mathcal {G}h_a^+|\) for a=1/6. The two bumps move apart as the sample rate a goes to zero. As a consequence, the local Lipschitz constant of \(h_a^+\) increases as a goes to zero
We therefore observe that function pairs breaking stability of continuous Gabor phase retrieval seemingly resemble function pairs breaking uniqueness of sampled Gabor phase retrieval. One is thus tempted to expect a direct connection between uniqueness of sampled Gabor phase retrieval and stability of continuous Gabor phase retrieval. This observation naturally leads to the following central question:
Question 1
Consider the set \(\mathcal {M}_{\nu }(\mathbb {R}^2)\) of signals whose local Lipschitz constant (defined in Eq. (21)) is upper bounded by \(\nu > 0\). Is there a lattice \(\Lambda \subset \mathbb {R}^2\) such that \(|\mathcal {G} f |= |\mathcal {G} g |\) on \(\Lambda \) implies that there exists an \(\alpha \in \mathbb {R}\) with \(f = \textrm{e}^{\textrm{i} \alpha } g\) for all \(f,g \in \mathcal {M}_{\nu }(\mathbb {R}^2)\)?
This question has been the starting point and main motivation of this paper. Along the way, we have established other results that are interesting on their own. The four main contributions of our work can be summarized as follows:
-
1.
The set of counterexamples is dense in \(L^2(\mathbb {R})\). For every lattice and for every square-integrable function f, we can construct signals which are arbitrarily close to f, do not agree up to a global constant phase factor and yet have Gabor transform magnitudes agreeing on the lattice (see Sect. 3.2).
-
2.
The notion of uniqueness for sampled Gabor phase retrieval is fragile. The Gaussian can be recovered from sampled Gabor transform magnitudes on sufficiently fine lattices but for each of such lattices there exist counterexamples which are arbitrarily close to the Gaussian (cf. Sect. 3).
-
3.
Considering the class of signals for which the local Lipschitz constant satisfies a uniform bound is not enough to restore uniqueness in sampled Gabor phase retrieval. Much to our surprise, we answer Question 1 in the negative. This is due to the existence of counterexamples which break uniqueness without affecting stability, see Fig. 2. Indeed, the counterexamples in Theorem 10 are constructed to be arbitrarily close to the normalized Gaussian \(\varphi (t) = 2^{1/4} \textrm{e}^{-\pi t^2}\) which is known to enjoy very strong stability properties. Restoring uniqueness will necessitate a more restrictive signal class (cf. Section 4).
-
4.
Local stability of (Gabor) phase retrieval may be quantified by Laplacian eigenvalues. In particular, we suggest that small Laplacian eigenvalues correspond to unstable directions: If there are only very few small eigenvalues of the Laplacian, there are only few directions of instability. Moreover, each direction of instability corresponds to an associated Laplacian eigenfunction (see Sect. 5).

A plot of the Gabor transform magnitude of the counterexamples whose existence is postulated in Theorem 10
Remark 1
As there is a lot of notation introduced throughout this paper, we include a list of symbols in Appendix A for the convenience of the reader.
2 Preliminaries and main concepts
We will consider signals in the modulation spaces
where \(\mathcal {S}'(\mathbb {R})\) denotes the class of tempered distributions. \(M^p(\mathbb {R})\) can be equipped with the norm
Let us emphasize that we are exclusively interested in the modulation spaces with parameter \(p \in [1,2]\). We will thus always be working with functions rather than abstract distributions. In particular, the following simple inclusion holds (cf. [29, Proposition 1.7 on p. 408]):
where \(p' \in [2,\infty ]\) denotes the Hölder conjugate of p and where we have equality as sets if \(p = 2\). We observe that the above inclusion implies that \(M^p(\mathbb {R}) \subset L^2(\mathbb {R})\), for \(p \in [1,2]\), such that the application of the Gabor transform to signals \(f \in M^p(\mathbb {R})\) is well-defined.
Next, we note that one cannot distinguish between f and \(\textrm{e}^{\textrm{i} \alpha } f\) on the basis of the magnitudes of the Gabor transform. As is usual in phase retrieval, we will therefore only seek to recover f up to a global constant phase factor. To formalize this, we introduce the equivalence relation
on \(M^p(\mathbb {R})\).
For ease of notation, we introduce the following operations in the context of \(L^p(\mathbb {R})\) with \(p \in [1,\infty ]\): The translation operator \({\text {T}}_x: L^p(\mathbb {R}) \rightarrow L^p(\mathbb {R})\) is defined as
for \(x \in \mathbb {R}\); the modulation operator \({\text {M}}_\omega : L^p(\mathbb {R}) \rightarrow L^p(\mathbb {R})\) is defined as
for \(\omega \in \mathbb {R}\).
Moreover, to represent rotation in \(\mathbb {R}^2\) by an angle \(\theta \in \mathbb {R}\), we use the rotation operator \({\text {R}}_\theta : \mathbb {R}^2 \rightarrow \mathbb {R}^2\), which, in matrix form, can be expressed as
Finally, we say that a lattice \(\Lambda \subset \mathbb {R}^2\) is a discrete subset of the time-frequency plane that can be expressed as \(L \mathbb {Z}^{k}\), where \(L \in \mathbb {R}^{2 \times k}\) is a matrix with linearly independent columns and \(k \in \{1,2\}\).
2.1 The Fock space and the Bargmann transform
Throughout this work, and notably in Sect. 3.2, we rely on the well-known connection between the Gabor transform, the Bargmann transform and the Fock space [13, Section 3.4 on pp. 53–58]. The Fock space \(\mathcal {F}^2(\mathbb {C})\) is the Hilbert space of all entire functions for which the norm induced by the inner product
is finite. Interestingly, the Fock space is isomorphic to \(L^2(\mathbb {R})\) with the Bargmann transform \(\mathcal {B}: L^2(\mathbb {R}) \rightarrow \mathcal {F}^2(\mathbb {C})\), given by
acting as the isomorphism. Moreover, the Bargmann transform and the Gabor transform are intimately related via the formula
Therefore, the range of the Gabor transform can be identified with \(\mathcal {F}^2(\mathbb {C})\) by reflection and multiplication with a smooth, non-zero function.
For our purposes, it is interesting to note that the Fock space is the space of all entire functions with a specific growth. Let us briefly explain this: The order \(\rho \ge 0\) of an entire function F is the infimum of all \(r > 0\) for which \(F(z) \in \mathcal {O}(\exp (|z |^r))\) as \(|z |\rightarrow \infty \). In the case where F is an entire function of order \(\rho \in (0,\infty )\), the type \(\tau \ge 0\) of F is the infimum of all \(t > 0\) such that \(F(z) \in \mathcal {O}(\exp (t |z |^\rho ))\) as \(|z |\rightarrow \infty \). An entire function F with order \(\rho < 1\) or order \(\rho = 1\) and type \(\tau < \infty \) is said to be of exponential type.
According to [13, Theorem 3.4.2 on p. 54], all functions in the Fock space are either of order \(\rho < 2\) or of order \(\rho = 2\) and type \(\tau \le \pi /2\). Conversely, it is readily seen that functions of order \(\rho < 2\) and functions of order \(\rho = 2\) with type \(\tau < \pi /2\) belong to the Fock space. In particular, functions of exponential type are in the Fock space. However, functions of order \(\rho = 2\) and type \(\tau = \pi /2\) must not necessarily belong to the Fock space as demonstrated in [7].
2.2 Laplacian eigenvalues, the Poincaré, and the Cheeger constant
In their work, Grohs and Rathmair [19] establish a connection between the Cheeger constant from spectral geometry and the local stability of the Gabor phase retrieval problem. They do so by linking stability to the Poincaré constant, which is the reciprocal of the first non-trivial eigenvalue of the Laplace operator. The connection to the Cheeger constant is then made through Cheeger’s inequality (cf. Eq. (9)). Since we use the link between the local stability of the Gabor phase retrieval problem and the Poincaré constant in Sect. 4, and refine the findings in [19] by making use of the Laplacian eigenvalues in Sect. 5, we briefly explain these concepts in the following.
2.2.1 Laplacian eigenvalues, the Poincaré, and the Cheeger constant in Riemannian geometry
To facilitate understanding, let us begin by briefly summarizing some fundamental concepts from spectral geometry [9]. For a compact, connected smooth Riemannian manifold M of dimension n, with Laplace–Beltrami operator \(\Delta = -{\text {div}} {\text {grad}}\), we consider the following eigenvalue problem: Find all \(\lambda \in \mathbb {R}\) such that there exists a non-trivial solution \(\phi \in C^2(M)\) to \(\Delta \phi = \lambda \phi \). It is known that the eigenvalues form a sequence \(0 = \lambda _0< \lambda _1 < \cdots \), where the non-negativity of the eigenvalues follows from the divergence theorem which impliesFootnote 1
for all eigenpairs \((\lambda _i,\phi _i)\). This equation also demonstrates that the only eigenfunctions with trivial eigenvalue are the constant functions.
Let \(H^1(M)\) denote the Sobolev space of \(L^2\)-functions with square-integrable weak derivatives up to first order. It can be shown that
for all \(f \in H^1(M)\) with zero mean. We refer to this inequality as the Poincaré inequality and to the reciprocal \(\lambda _1^{-1/2}\) as the Poincaré constant. It is worth noting that equality in Eq. (8) is achieved by the eigenfunctions with eigenvalue \(\lambda _1\), making \(\lambda _1^{-1}\) the smallest constant for which Eq. (8) holds.
Lastly, the first non-trivial eigenvalue of the Laplace operator is connected to Cheeger’s (isoperimetric) constant,Footnote 2
where the infimum is taken over all compact \((n-1)\)-dimensional submanifolds S of M that divide M into two open submanifolds \(M_1\) and \(M_2\) satisfying \(\partial M_1 = \partial M_2 = S\): Specifically, we have [10]
Intuitively, the Cheeger constant measures the ease with which we can cut the manifold M into two parts of roughly equal size. The Calabi dumbbell (cf. Fig. 6) nicely exemplifies this: It has a small Cheeger constant because cutting through the middle (the "bridge") requires only a short incision to separate the two large regions on either side of the bridge.
2.2.2 The Poincaré constant and stability in Gabor phase retrieval
Next, we provide a brief overview of the connection between the weighted Poincaré constant and stability of the Gabor phase retrieval problem as established in [19].
Let \(1 \le p < \infty \), \(\Omega \subseteq \mathbb {R}^2\) be a domain, and w be a weight on \(\Omega \). In the following, \(L^p(\Omega ,w)\) and \(W^{k,p}(\Omega ,w)\) denote the respective weighted spaces on \(\Omega \). The weighted Poincaré constant is defined as
in [19], where
and \(\mathcal {M}(\Omega )\) denotes the set of functions \(F: \Omega \rightarrow \mathbb {C}\) for which \(\{x+iy: (x,y) \in \Omega \} \ni (x+iy) \mapsto F(x,y) \in \mathbb {C}\) is meromorphic.
Remark 2
It is worth noting that the definition of the Poincaré constant used here slightly deviates from the classical definition, as we specifically consider the case for which results from [19] are applicable.
The central result of [19] states that under certain assumptions (see Theorem 5.9 therein), the following stability result holds: For every function \(f \in M^{p}(\mathbb {R})\), there exists a constant \(c > 0\) such that for every \(g \in M^{p}(\mathbb {R})\),
where
2.2.3 The Cheeger constant and stability in Gabor phase retrieval
Finally, the Poincaré constant can be upper bounded in terms of the Cheeger constant,
where the infimum is taken over all open subsets S of \(\Omega \) for which \(\partial S \cap \Omega \) is smooth [19]. Here, \(f \in M^p(\mathbb {R})\) for some \(p \in [1,2]\) and \(\Omega \subset \mathbb {R}^2\) is a connected domain. The Cheeger constant quantifies the ease with which we can cut \(|\mathcal {G} f|\) into two parts of roughly equal size. Consider the function \(h_a^+\) whose Gabor transform magnitude is depicted in Fig. 1, for instance: Cutting right down the middle of the two bumps is easy, i.e., \(\Vert \mathcal {G} f \Vert _{L^p(\partial S)}\) is small. It can then be shown that the Cheeger constant of \(h_a^+\) is small. We can compare this to the function whose Gabor transform magnitude is depicted in Fig. 2: There, cutting right down the middle of the two bumps is even easier. However, when one of the bumps is significantly smaller than the other, \(\min \{ \Vert \mathcal {G} f \Vert _{L^p(S)}, \Vert \mathcal {G} f \Vert _{L^p(S^\textrm{c})} \}\) becomes small as well, and it is not clear whether \(h_{p,\Omega }(f)\) is small.
3 Uniqueness is fragile in sampled Gabor phase retrieval
In this section, we show that there exist functions which can be uniquely recovered from sampled Gabor transform magnitudes but that, for every function \(f \in L^2(\mathbb {R})\), there exist counterexamples to sampled Gabor phase retrieval which are arbitrarily close to f. Therefore, uniqueness is a fragile concept in sampled Gabor phase retrieval.
3.1 On counterexamples for sampled Gabor phase retrieval
Let us first define what is meant by counterexamples for sampled Gabor phase retrieval.
Definition 1
Let \(\Lambda \subset \mathbb {R}^2\). The class of counterexamples for sampled Gabor phase retrieval on \(\Lambda \) is defined by
An element \(f \in \mathfrak {C}(\Lambda )\) is called a counterexample for sampled Gabor phase retrieval on \(\Lambda \).
There is a principled way of generating large families of counterexamples starting with two counterexamples only. Specifically, we may consider \(f,g \in L^2(\mathbb {R})\) such that f and g do not agree up to global phase while
where \(\Lambda \subset \mathbb {R}^2\). If for some element \(m \in \mathcal {F}^2(\mathbb {C})\) of the Fock space, it is true that \(m \cdot \mathcal {B} f, m \cdot \mathcal {B} g \in \mathcal {F}^2(\mathbb {C})\), i.e. both \(m \cdot \mathcal {B} f\) and \(m \cdot \mathcal {B} g\) are in the Fock space, then \(f_m:= \mathcal {B}^{-1} (m \cdot \mathcal {B} f)\) and \(g_m:= \mathcal {B}^{-1} (m \cdot \mathcal {B} g)\) are well-defined functions in \(L^2(\mathbb {R})\) such that \(|\mathcal {G} f_m |= |\mathcal {G} g_m |\) on \(\Lambda \). Additionally, \(f_m\) and \(g_m\) will generally not agree up to global phase. The above construction works because the magnitudes of the Gabor transforms of \(f_m\) and \(g_m\) agree on \(\Lambda \) if and only if the magnitudes of their Bargmann transforms agree. By construction, their Bargmann transforms are \(m \cdot \mathcal {B} f\) and \(m \cdot \mathcal {B} g\) whose magnitudes must agree on \(\Lambda \) by Eq. (13). While this idea can be explored in various ways, we choose to focus on its most straightforward corollary in this context, applying it to the counterexamples presented in [4].
Let \(a > 0\) and denote the normalized Gaussian by \(\varphi (t) = 2^{1/4} \exp (-\pi t^2)\) for \(t \in \mathbb {R}\). Recall from the introduction (cf. Theorem 1) that the functions
do not agree up to global phase and still satisfy \(|\mathcal {G} h^+ |= |\mathcal {G} h^- |\) on \(\mathbb {R}\times a \mathbb {Z}\).
The Bargmann transforms of the signals \(h^\pm \in L^2(\mathbb {R})\) are given by
and are thus of exponential type. It therefore follows that, if \(m \in \mathcal {F}^2(\mathbb {C})\) is not of second order and type \(\pi /2\)Footnote 3, then \(m \cdot \mathcal {B} h^\pm \in \mathcal {F}^2(\mathbb {C})\) and thus
satisfy \(|\mathcal {G} h_m^+ |= |\mathcal {G} h_m^- |\) on \(\mathbb {R}\times a \mathbb {Z}\). In particular, we can consider \(m_\tau (z):= \exp (\pi \tau z)\), for \(\tau \in \mathbb {R}\) and \(z \in \mathbb {C}\), which is of exponential type and therefore in the Fock space. The corresponding functions
do not agree up to global phase and have Gabor transform magnitudes that agree on \(\mathbb {R}\times a \mathbb {Z}\). The former is true because \(m_\tau = \exp (\pi \tau \cdot )\) has no roots while \(\mathcal {B} h^+\) and \(\mathcal {B} h^-\) have disjoint root sets such that \(m_\tau \cdot \mathcal {B} h^+ \not \sim m_\tau \cdot \mathcal {B} h^-\). Therefore, the linearity of the Bargmann transform implies that \(h_\tau ^+ \not \sim h_\tau ^-\). We visualize the Gabor transform magnitude of \(h_\tau ^+\) in Fig. 2 and note that one of the two bumps has shrunk considerably in comparison to Fig. 1. In fact, it looks like \(h_\tau ^+\) is very close to a time-shifted (and scaled) Gaussian when \(|\tau |\) is large.
It is therefore no surprise that time-shifting and scalingFootnote 4\(h_\tau ^\pm \), yields the functions
where the translation operator \({\text {T}}_x\) is defined in Eq. (5). We emphasize that these functions satisfy
pointwise and in \(L^p(\mathbb {R})\), for all \(p \in [1,\infty ]\). Therefore, there exist counterexamples to sampled Gabor phase retrieval which are arbitrarily close to the Gaussian.
Next, we rigorously show that \(f^\pm \) are counterexamples to sampled Gabor phase retrieval by direct computation. We note that this already follows from [4, 17]. Since most of our proof will be used at a later point and for the convenience of the reader, we give an independent derivation here. In the following, we will use the well-known fact that the Gabor transform of the normalized Gaussian \(\varphi \) is
for \((x,\omega ) \in \mathbb {R}^2\).
Lemma 2
Let \(a,\gamma > 0\) and let \(f^\pm \) be defined as in Eq. (15). Then, \(f^+\) and \(f^-\) do not agree up to global phase and yet
Proof
The statement can be obtained by computing the Gabor transforms of \(f^\pm \). By the linearity of the Gabor transform and the covariance property (cf. [13, Lemma 3.1.3 on p. 41]), we find that
for \((x,\omega ) \in \mathbb {R}^2\). Therefore, we may compute
According to equation (17), the Gabor transform of \(f^\pm \) is zero at \((x,\omega )\) if and only if
for some \(k \in \mathbb {Z}\), which is equivalent to
Therefore, the root sets of \(\mathcal {G} f^\pm \) are given by
We note here that the root sets of \(\mathcal {G} f^+\) and \(\mathcal {G} f^-\) are different from each other so that \(\mathcal {G} f^+\) and \(\mathcal {G} f^-\) do not agree up to global phase. It follows by the linearity of the Gabor transform that \(f^+\) and \(f^-\) cannot agree up to global phase. Finally, we consider Eq. (17) once again to see that
must hold, for \(x \in \mathbb {R}\) and \(k \in \mathbb {Z}\).
3.2 The set of counterexamples is dense in the space of square-integrable signals
Using the counterexamples \(f^\pm \), which can be arbitrarily close to the Gaussian, we can show that if \(\Lambda \subset \mathbb {R}^2\) is any set of equidistant parallel lines or any lattice, then the class of counterexamples \(\mathfrak {C}(\Lambda )\) is dense in \(L^2(\mathbb {R})\). Intuitively, our proof for this statement will work because the Bargmann transforms of the counterexamples \(f^\pm \) are given by
We can absorb the factor \(\exp (-\pi /(2a^2))\) into \(\gamma \) and obtain
with \(\delta >0\), which are entire functions of exponential type and thus in the Fock space. Additionally, \(H^\pm _\delta \) converge to 1 in \(\mathcal {F}^2(\mathbb {C})\) as \(\delta \rightarrow 0\), do not agree up to global phase and satisfy \(|H^+_\delta |= |H^-_\delta |\) on \(\mathbb {R}+ \textrm{i} a \mathbb {Z}\): They are, in short, the ideal multipliers in the Fock space to transform a general function \(f \in L^2(\mathbb {R})\) into a “close-by" counterexample.
Theorem 3
Let \(a > 0\). Then, \(\mathfrak {C}(\mathbb {R}\times a \mathbb {Z})\) is dense in \(L^2(\mathbb {R})\).
Proof
Let \(\epsilon > 0\) and \(f \in L^2(\mathbb {R})\). We want to show that there exist \(g^\pm \in L^2(\mathbb {R})\) which do not agree up to global phase, are \(\epsilon \)-close to f in \(L^2(\mathbb {R})\), i.e. \(\Vert f - g^\pm \Vert _2 < \epsilon \), and satisfy
According to [13, Theorem 3.4.2 on p. 54], the monomials
form an orthonormal basis for the Fock space \(\mathcal {F}^2(\mathbb {C})\). Therefore, the space of complex polynomials is dense in the Fock space and we can find \(P \in \mathbb {C}[z]\) such that
Let us now consider the functions \(H^\pm _\delta \) defined in Eq. (19) and note that \(G_\delta ^\pm := H_\delta ^\pm \cdot P \in \mathcal {F}^2(\mathbb {C})\) since \(G_\delta ^\pm \) are entire functions of exponential type. Hence, we can define \(g^\pm _\delta := \mathcal {B}^{-1} G^\pm _\delta \in L^2(\mathbb {R})\). To establish the necessary properties of \(g^\pm _\delta \), we will work with their Bargmann transforms \(G_\delta ^\pm \). First, we note that
for \(t \in \mathbb {R}\) and \(k \in \mathbb {Z}\). It follows that \(|G^+_\delta |= |G^-_\delta |\) on \(\mathbb {R}+ \textrm{i} a\mathbb {Z}\) and thus that \(|\mathcal {G} g^+_\delta |= |\mathcal {G} g^-_\delta |\) on \(\mathbb {R}\times a \mathbb {Z}\). Secondly, we note that \(G^\pm _\delta \) do not agree up to global phase: Indeed, \(H^\pm _\delta \) both have infinitely many roots but no root of \(H^+_\delta \) is a root of \(H^-_\delta \) and vice versa. At the same time, P is a polynomial and has only finitely many roots. It follows that \(G^+_\delta \) does have roots which are no roots of \(G^-_\delta \) (and vice versa) and thus \(G^+_\delta \not \sim G^-_\delta \). By the linearity of the Bargmann transform, we find \(g^+_\delta \not \sim g^-_\delta \). Finally, we note that
and so there exists a \(\delta > 0\) depending on a, \(\epsilon \) and P (which in turn depends on f and \(\epsilon \)) such that
We conclude that
Remark 3
(Some explanations on the proof) As \(\mathcal {B} f \in \mathcal {F}^2(\mathbb {C})\), for \(f \in L^2(\mathbb {R})\), we know that \(\mathcal {B} f\) is either an entire function of exponential type or an entire function of second order. If \(\mathcal {B} f\) is of second order, then its type is less or equal to \(\pi /2\). In the case that the type is strictly smaller than \(\pi /2\), it holds that \(\mathcal {B} f \cdot H^\pm _\delta \in \mathcal {F}^2(\mathbb {C})\) and thus we can define
with
to obtain counterexamples which are \(\epsilon \)-close to f in \(L^2(\mathbb {R})\).
On the other hand, if \(\mathcal {B} f\) is a second-order entire function of type \(\pi /2\), it is not guaranteed that \(\mathcal {B} f \cdot H^\pm _\delta \) is in the Fock space (see [7] for two striking examples for why this can fail). As the only situation in which \(\mathcal {B} f \cdot H^\pm _\delta \) may not be in the Fock space occurs when \(\mathcal {B} f\) is exactly of order two and of type \(\pi /2\), it seems obvious that the functions f for which \(\mathcal {B} f \cdot H^\pm _\delta \in \mathcal {F}^2(\mathbb {C})\) holds must be dense in \(L^2(\mathbb {R})\). We can prove this by realizing that the complex polynomials are dense in \(\mathcal {F}^2(\mathbb {C})\).
We can adapt the argument above to work on a general set of parallel lines in the time-frequency plane. In order to do so, we use the functions
in our proof and note that the corresponding \(g^\pm _\delta \in L^2(\mathbb {R})\) satisfy
where \(a > 0\), \(\lambda _0 \in \mathbb {R}^2 \simeq \mathbb {C}\), and \(R_\theta : \mathbb {R}^2 \rightarrow \mathbb {R}^2\) denotes rotation by \(\theta \in \mathbb {R}\) in \(\mathbb {R}^2\) as defined in Eq. (6). The statement for general lattices follows from the same consideration because all lattices are a subset of some set of infinitely many equidistant parallel lines. We therefore arrive at the following result.
Theorem 4
Let \(\Lambda \subset \mathbb {R}^2\) be a set of equidistant parallel lines or a lattice. Then, \(\mathfrak {C}(\Lambda )\) is dense in \(L^2(\mathbb {R})\).
Example 1
To illustrate our result, we create counterexamples to sampled Gabor phase retrieval which are close to the Hermite functions \((H_n)_{n \ge 0} \in L^2(\mathbb {R})\). To do so, we recall [13, Theorem 3.4.2 on p. 54] that
Therefore, the Gabor transform of the Hermite functions is
for \((x,\omega ) \in \mathbb {R}^2\). Figure 3a provides a plot of the Gabor transform (in magnitude) of the Hermite function for \(n=5\).

To find a counterexample which is close to \(H_n\), we can define
as described in Remark 3. For visualization purposes, we are interested in the spectrogram of \(g^\pm _\delta \) and compute
For comparison, we plot the magnitude of the above Gabor transform (for \(n = 5\), \(a = \tfrac{1}{4}\) and \(\delta = \tfrac{1}{50} \exp (-10 \pi )\)) in Fig. 3b.
Remark 4
It is notable that if \(f \in L^2(\mathbb {R})\) is such that \(\mathcal {B} f\) is not of second order and of type \(\pi /2\), then there are counterexamples of the form
i.e. \(g^\pm _\delta \) are small additive perturbations of our original signals f.
3.3 Recovering the Gaussian from Gabor transform magnitudes on a lattice
Theorem 4 states that the counterexamples \(\mathfrak {C}(\Lambda )\) are dense in \(L^2(\mathbb {R})\); in other words, for every \(f \in L^2(\mathbb {R})\), there is a counterexample to sampled Gabor phase retrieval which is arbitrarily close to f. Naturally, one might wonder whether all \(f \in L^2(\mathbb {R}) {{\setminus }} \{0\}\) are counterexamples. In this subsection, we show that this is not true and that, in particular, the normalized Gaussian can be recovered from Gabor magnitude samples on sufficiently fine square lattices.
In order to accomplish this, we relate sampled Gabor phase retrieval to a sampling problem in the Fock space of entire functions. In this way, our result reduces to identifying all \(F \in \mathcal {F}^2(\mathbb {C})\) which have unit absolute value on a square lattice. This reduction relates our problem to some form of maximum modulus (or Phragmén–Lindelöf) principle (cf. [28, Section 5.1 on pp. 165–168 and Section 5.6 on pp. 176–181]): Indeed, we are considering a second order entire function F which is bounded on all lattice points; this suggests that F should be constant in the entire complex plane as long as the lattice is dense enough. This intuition is correct and follows from an elegant result discovered independently by V. Ganapathy Iyer [22] and Albert Pfluger [25] in 1936.
Theorem 5
(Cf. [25, Theorem I A on p. 305]) Let h be an entire function such that
where \(M_h(r):= \max _{|z |= r} |h(z) |\). If there exists a constant \(\kappa > 0\) such that
then h is constant.
We can now prove the following result.
Theorem 6
Let \(0< a < 1\) and \(f \in L^2(\mathbb {R})\) be such that
Then, there exists an \(\alpha \in \mathbb {R}\) such that \(f = \textrm{e}^{\textrm{i} \alpha } \varphi \).
Proof
Let us consider the entire function \(h(z):= \mathcal {B}f(az)\) for \(z \in \mathbb {C}\). We directly estimate
following [13, Proposition 3.4.1 and Theorem 3.4.2 on p. 54] which shows that
Additionally, Eq. (7) and our assumption on f imply that
Therefore, Theorem 5 shows that h is constant which together with \(|h |= 1\) implies that there exists an \(\alpha \in \mathbb {R}\) such that \(h = \textrm{e}^{\textrm{i} \alpha }\). Since the Bargmann transform is unitary [13, Theorem 3.4.3 on p. 56] and linear, and since \(\mathcal {B} \varphi = 1\), it follows that \(f = \textrm{e}^{\textrm{i} \alpha } \varphi \) as desired.
Remark 5
A natural confusion that might arise in connection with Theorem 6 is in how far it is different from the result in [18] on shift-invariant spaces with Gaussian generator,
where \(p \in [1,\infty ]\) and \(\beta \in (0,\infty )\). The aforementioned result applied to the Gaussian states that if \(\beta > 0\) and \(0< a < \beta /2\) are such that \(a \beta \not \in \mathbb {Q}\), then the only functions \(f \in V_\beta ^1(\varphi )\) satisfying
are of the form \(f = \textrm{e}^{\textrm{i} \alpha } \varphi \), where \(\alpha \in \mathbb {R}\). The difference is the assumption \(f \in V_\beta ^1(\varphi )\) which stands in contrast to the weaker assumption \(f \in L^2(\mathbb {R})\) in Theorem 6. In short, Theorem 6 implies that the Gaussian can be distinguished from all other functions in \(L^2(\mathbb {R})\) by looking at its sampled Gabor transform magnitude measurements while [18, Theorem 3.10 on p. 188] only implies that it is distinguishable from the functions in \(V_\beta ^1(\varphi ) \subsetneq L^2(\mathbb {R})\).
4 On the stability of Gabor phase retrieval
Having discussed uniqueness from samples in the previous section, we now turn to the question of stability and the lack of connection between these two properties. Let \(\Omega \subseteq \mathbb {R}^2\) be a domain and let \(1\le p\le \infty \). Given \(f\in M^{p}(\mathbb {R})\), we denote by \(|\mathcal {G}f_{|_{\Omega }}|\) the magnitude of the Gabor transform of f on \(\Omega \). We are interested in the local Lipschitz constant of f on \(\Omega \), i.e. the smallest constant \(C>0\) such that
Here, \(\Vert \cdot \Vert _{\mathfrak {B}}\) denotes the norm of a Banach space \(\mathfrak {B}\) in which the space of measurements \(|\mathcal {G}f_{|_{\Omega }}|\), for \(f\in M^{p}(\mathbb {R})\), lie. In particular, we denote the local Lipschitz constant by \(c_{p,\Omega }(f)\) when \(\Vert \cdot \Vert _{\mathfrak {B}}\) is given by (12), i.e. \(c_{p,\Omega }(f)\) is the best possible constant \(C>0\) for which
A large constant \(c_{p,\Omega }(f)\) indicates that the problem of recovering \(\mathcal {G} f_{|_{\Omega }}\) from \(|\mathcal {G}f_{|_{\Omega }}|\) cannot be controlled well since there exists a function \(g\in M^{p}(\mathbb {R})\) with \(|\mathcal {G}g_{|_{\Omega }}|\) very close to \(|\mathcal {G}f_{|_{\Omega }}|\) while the distance between \(\mathcal {G}f_{|_{\Omega }}\) and \(\mathcal {G}g_{|_{\Omega }}\) is not small. Consequently, the problem of recovering f from \(|\mathcal {G}f_{|_{\Omega }}|\) is not well controlled either since
On the other hand, a small \(c_{p,\Omega }(f)\) translates into good stability guarantees for the recovery of \(\mathcal {G} f_{|_{\Omega }}\) from \(|\mathcal {G}f_{|_{\Omega }}|\). We observe that, if \(\Omega \subsetneq \mathbb {R}^2\), this does not guarantee that the problem of recovering f from \(|\mathcal {G}f_{|_{\Omega }}|\) is stable. However, if we suppose that f is \(\epsilon \)-concentrated on \(\Omega \), i.e. f satisfies
for some small \(\epsilon >0\), then we obtain a weaker notion of stability for the recovery of f from \(|\mathcal {G}f_{|_{\Omega }}|\) in the sense that
for any \(g\in M^p(\mathbb {R})\) that is \(\epsilon \)-concentrated on \(\Omega \).
As discussed in Sect. 2.2, the stability constant \(c_{p,\Omega }(f)\) can be controlled by the weighted Poincaré constant: the smaller the Poincaré constant, the better the local stability of Gabor phase retrieval at f (cf. equation (11)). The relation to the Cheeger constant is inversely proportional. More precisely, the overall picture is:
In what follows, we will show that the construction of the counterexamples (15) leads to the existence of function perturbations which break uniqueness from samples while not affecting stability. Hence, much to our surprise, the answer to Question 1 is negative. Note that the precise statement in our Theorem 10 slightly differs from Question 1 and we discuss these technicalities in Sect. 4.2.
4.1 On the variation of the weighted Poincaré constant
A natural question concerning weighted Poincaré inequalities is how the Poincaré constant \(C_{\textrm{poinc}}(p,\Omega ,w)\) changes under variations of the weight w. Lemma 8 provides a simple result in that direction. We first state a classical fact that we exploit in its proof.
Lemma 7
[11] Let \(1 \le p < \infty \), let \(\Omega \subset \mathbb {R}^2\) be a domain, and let w be a weight on \(\Omega \). Then, for every \(F \in L^p(\Omega ,w)\), it holds that
Lemma 8
Let \(1 \le p < \infty \), let \(\Omega \subset \mathbb {R}^2\) be a domain, and let w be a weight on \(\Omega \).
Let \(w'\) be another weight on \(\Omega \) which satisfies
for some constants \(0< A \le B < \infty \). Then, it holds that
Proof
By Equation (24), it follows that for every \(F \in L^p(\Omega ,w)\), the integral inequality
holds true. Hence, we have that
and consequently \(L^p(\Omega ,w) = L^p(\Omega ,w')\) as well as \(W^{1,p}(\Omega ,w) = W^{1,p}(\Omega ,w')\). In particular, we obtain that for every \(F \in L^p(\Omega ,w)\) and for every \(c\in \mathbb {R}\),
as well as
We can now prove the upper and lower bounds in Eq. (25). By using Lemma 7 and Eq. (10) along with the above inequalities, we find that
We can essentially repeat the same argument to show the lower bound
which concludes the proof.
4.2 Answering question 1
We apply Lemma 8 to the special case where the weights are given by
for some \(1 \le p < \infty \), and where \(f_{\pm }\) denotes the counterexamples
constructed in Sect. 3.1. By Eqs. (16) and (17), we have that for all \((x,\omega ) \in \mathbb {R}^2\),
The expression of the Gabor transform of the counterexamples \(f_\pm \) allows us to show that for all \(a,R > 0\), there exists a \(\gamma _0 = \gamma _0(a,R) > 0\) such that for all \(\gamma \in (0,\gamma _0)\), the roots of \(\mathcal {G} f_\pm \) fall outside of the cube \([-R,R]^2\). By Eq. (16), \(|\mathcal {G} \varphi (x,\omega ) |>0\) for all \((x,\omega )\in \mathbb {R}^2\) and, thus, the roots of \(\mathcal {G} f_\pm \) correspond to the roots of \((x,\omega ) \mapsto |1 \pm \textrm{i} \gamma \textrm{e}^{\frac{\pi }{a}(x-\textrm{i} \omega )} \textrm{e}^{-\frac{\pi }{2a^2}} |\). Furthermore, by the reverse triangular inequality
and the continuous function \((x,\omega ) \mapsto |\textrm{e}^{\frac{\pi }{a}(x-\textrm{i} \omega )} \textrm{e}^{-\frac{\pi }{2a^2}} |\) attains its maximum on \([-R,R]^2\). Hence, the Gabor transforms \(\mathcal {G} f_\pm \) have no roots in \([-R,R]^2\) provided that we choose
We can also determine \(\gamma _0\) precisely by examining the root sets of \(\mathcal {G} f^\pm \) which are
as proven in equation (18). (We have visualized these roots in Fig. 4.) Indeed, let us consider arbitrary but fixed \(a,R > 0\) and set
Then, it holds that for all \(\gamma \in (0,\gamma _0]\), the roots of \(\mathcal {G} f_\pm \) fall outside the strip \((-R,R) \times \mathbb {R}\).

We consider \(a = 1/2\) and \(\gamma = \exp (-5\pi )\). The roots of \(\mathcal {G} f^+\) are indicated by circles and the roots of \(\mathcal {G} f^-\) are indicated by disks. We have also drawn the local maxima of \(\mathcal {G} f^\pm \) as squares and indicated the region on which 99% of the \(L^2\)-mass of \(\mathcal {G} f^\pm \) is concentrated in light gray. We highlight that we have chosen \(\gamma < \gamma _0(1/2,R=3) = \exp (-4\pi )\) such that the roots of \(\mathcal {G} f^\pm \) fall outside the open ball of radius \(R=3\). We also note that there is no gray region around the local maximum at (2, 0) indicating that very little mass is concentrated on the small bump
Hence, we restrict to a bounded domain \(\Omega \subseteq \mathbb {R}^2\) and choose \(R>0\) such that \(\Omega \subseteq (-R,R)\times \mathbb {R}\). If \(\gamma < \gamma _0\) as above, all the roots of \(|\mathcal {G}f_{\pm }|^p\) fall outside of \(\Omega \). As a consequence of the extreme value theorem, there exist \(0<A_{\gamma }\le B_{\gamma }<\infty \) such that
More precisely, given any \(0<\delta <1\), the stronger condition
implies that for all \((x,\omega ) \in \Omega \),
and consequently
for all \((x,\omega ) \in \Omega \).
Corollary 9
Let \(1 \le p < \infty \), let \(\Omega \subset \mathbb {R}^2\) be a bounded domain and let \(a > 0\). Then, for any \(0<\delta <1\), there exists a constant \(\gamma _\delta = \gamma _\delta (a,\Omega ) > 0\) such that for all \(\gamma <\gamma _\delta \), it holds that
Proof
The proof follows by applying Lemma 8 along with Eq. (26).
Remark 6
Theorem B.7 together with Theorem B.8 in [19] ensure that
whenever \(p\in [1,2]\) and \(\Omega \subseteq \mathbb {R}^2\) is a bounded domain with Lipschitz boundary.
Let \(\nu >0\) and let \(B_R\) denote the ball of radius \(R > 0\) centered at 0. We recall the notation \(\mathcal {M}_{\nu }(B_R)\) introduced in Question 1 for the class of functions
The following theorem is our main result. It provides a theoretical foundation for our claim that the signal class \(\mathcal {M}_\nu (\mathbb {R}^2)\) cannot serve as a prior for uniqueness in sampled Gabor phase retrieval. More precisely, it states that there exists \(\nu > 0\) for which the signal class \(\mathcal {M}_\nu (B_R)\), \(R > 1\), contains functions that do not agree up to global phase but whose Gabor transform magnitudes agree on a rectangular lattice \(\Lambda \) — no matter how large we choose \(R > 1\) and how fine we choose the lattice. This clearly implies the existence of counterexamples for sampled Gabor phase retrieval on arbitrary rectangular lattices in all the classes of functions \(\mathcal {M}_{\overline{\nu }}(B_R)\), \(\overline{\nu }>\nu \), \(R>1\). Observe that every rectangular lattice \(\Lambda \) is contained in a set of parallel lines; that is, there exists \(a>0\) such that \(\Lambda \subseteq \mathbb {R}\times a\mathbb {Z}\).
Theorem 10
(Main result) Let \(p\in [1,2)\), \(q\in (2p/(2-p),\infty )\). There exists \(\nu >0\) such that, for all \(R>1\) and for all \(a>0\), there exist \(f,g\in \mathcal {M}_{\nu }(B_R)\) such that \(f \not \sim g\) but
Proof
We show that there exists \(\nu >0\) such that, for all \(R>1\) and for all \(a>0\), there exists \(\gamma >0\) such that
where
We already know from Sect. 3.1 that \(f_\pm \in M^{p}(\mathbb {R})\), \(f_+\not \sim f_-\) and
Let \(R>1\) and \(a>0\). We choose
with \(0<\delta <1\). The condition \(\gamma <\delta \textrm{e}^{-\frac{\pi }{a}\left( R - \frac{1}{2a} \right) }\) ensures that the roots of \(f_\pm \) fall outside the ball \(B_R\). Theorem 5.9 in [19] states that
where \(c>0\) is a constant depending on p, q and monotonically increasingly on
where \(\varphi '\) denotes the first derivative of the Gaussian \(\varphi \).
By Corollary 9, we know how to upper bound the weighted Poincaré constant in (27):
By Theorem B.12 together with Theorem 5.10 in [19], there exists \(\eta \) depending on p but independent of \(R>0\) such that
which yields
Moreover, by equation (26), we have that
as well as
Since the constant c in (29) depends monotonically increasingly on (28), the above inequalities allow to upper bound the constant c with a constant \(c'\) independent of R, a and \(\gamma \). Hence, we conclude the proof by defining
which is independent of R and a.
4.3 Discussion of Theorem 10
To conclude this section, we give some insights and discuss possible extensions of our main theorem.
-
1.
The constant \(\nu \) is linked to the stability constant of the Gaussian \(\varphi \), which in the result in [19] is estimated by \(c(1+\eta )\). The Gaussian \(\varphi \) enjoys very strong stability properties for Gabor phase retrieval and the class \(M_\nu (B_R)\) with our choice of \(\nu \) has stability properties close to that of \(\varphi \).
-
2.
It is worth observing that, while Question 1 is stated for \(\Omega =\mathbb {R}^2\), Theorem 10 is proved for arbitrary large balls \(B_R\), with \(R>1\). This restriction originates from the bounds on the Poincaré constant. However, Theorem 10 shows that for every sampling rate \(a>0\), we can construct functions \(f_\pm \) satisfying
$$\begin{aligned} c_{p,B_R}(f_{\pm })\le \nu , \end{aligned}$$with \(R>1/a\). The condition \(R>1/a\) implies that the ball \(B_R\) encloses the centers (0, 0) and (1/a, 0) of the two bumps of \(|\mathcal {G}f_\pm |^p\), and consequently all the features that may affect the local stability constants \(c_{p,\mathbb {R}^2}(f_{\pm })\). For this reason, it seems plausible to conjecture that \( c_{p,\mathbb {R}^2}(f_{\pm }) \) may also be bounded by a constant \(\nu '\) independent of the sampling rate a. While a proof of this final argument would allow us to fully answer Question 1, this seems to be mainly a technicality.
-
3.
We can extend Theorem 10 to general lattices of the form \(\Lambda =L\mathbb {Z}^2\), \(L\in {\textrm{GL}}_2(\mathbb {R})\): Given a lattice \(\Lambda \), there exist \(a>0\) and \(\theta \in \mathbb {R}\) such that \(\Lambda \subseteq R_{\theta }(\mathbb {R}\times a\mathbb {Z})\), where \(R_{\theta }\) denotes the rotation matrix
$$\begin{aligned} R_{\theta }=\left( \begin{matrix}\cos {\theta } &{} -\sin {\theta }\\ \sin {\theta } &{} \cos {\theta } \end{matrix}\right) . \end{aligned}$$We can therefore adapt the proof of Theorem 10 to the functions
$$\begin{aligned} f^{\theta }_\pm (t)=\mathcal {F}_{-\theta }f_\pm (t), \end{aligned}$$where \(\mathcal {F}_{-\theta }:L^2(\mathbb {R}^2)\rightarrow L^2(\mathbb {R}^2)\) denotes the fractional Fourier transformFootnote 5 of order \(-\theta \). It holds that \(f_\pm ^{\theta } \in M^{p}(\mathbb {R})\), \(f_+^{\theta }\not \sim f_-^{\theta }\) and
$$\begin{aligned} |\mathcal {G}f_+^{\theta }(x,\omega )|=|\mathcal {G}f_-^{\theta }(x,\omega )|,\quad (x,\omega )\in R_{\theta }(\mathbb {R}\times a\mathbb {Z})\supseteq \Lambda . \end{aligned}$$Furthermore, we can directly compute that
$$\begin{aligned} |\mathcal {G}f_\pm ^{\theta }(x,\omega )|=|\mathcal {G}f_\pm (R_{-\theta }(x,\omega ))|,\quad (x,\omega )\in \mathbb {R}^2. \end{aligned}$$(30)The reader may consult [4, 17] for the detailed proofs of the above facts. We see from Eq. (30) that \(|\mathcal {G}f_\pm ^{\theta }|\) is the result of a rotation of \(|\mathcal {G}f_\pm |\) in the time-frequency plane. Thus, it follows by Eq. (18) that the root sets of \(\mathcal {G}f_\pm ^{\theta }\) are
$$\begin{aligned} \left\{ R_{\theta }\left( \frac{1}{2a} - \frac{a \log \gamma }{\pi }, \pm \frac{a}{2} + 2 a k \right) :\, k \in \mathbb {Z} \right\} . \end{aligned}$$Therefore, given \(R > 1\) and \(a>0\), the condition
$$\begin{aligned} \gamma < \textrm{e}^{-\frac{\pi }{a}\left( R - \frac{1}{2a} \right) } \end{aligned}$$ensures that all the roots of \(\mathcal {G}f_\pm ^{\theta }\) fall outside the strip \(R_{\theta }((-R,R) \times \mathbb {R})\) in the time-frequency plane. With this, it is easy to see that analogous arguments as in the proofs of Corollary 9 and Theorem 10 apply to \(|\mathcal {G}f_\pm ^{\theta }|\).
-
4.
A natural question is whether a real-valuedness assumption on the signals combined with a uniform bound on the local Lipschitz constant would restore uniqueness from samples. We expect the answer to this question to be negative: One can construct counterexamples
$$\begin{aligned} g_\pm = \varphi \pm \textrm{i}\gamma {\text {M}}_{\frac{1}{a}}\varphi \mp \textrm{i}\gamma {\text {M}}_{-\frac{1}{a}}\varphi ,\quad \gamma >0. \end{aligned}$$which by [17, Theorem 3.13] are real-valued, do not agree up to global phase and satisfy
$$\begin{aligned} |\mathcal {G}g_+(x,\omega )|=|\mathcal {G}g_-(x,\omega )|,\quad (x,\omega )\in a\mathbb {Z}\times \mathbb {R}. \end{aligned}$$Therefore, we see that for any given rectangular lattice \(\Lambda \), there exist real-valued functions which are arbitrarily close to the Gaussian and are thus expected to have good local stability properties. At the same time, they do not agree up to global phase but have Gabor transform magnitudes agreeing on \(\Lambda \).
5 Directions of instability
This section is a general discussion regarding the connection between instability of phase retrieval and Laplacian eigenfunctions and extends some of the ideas in [19]. The main goal of this section is
-
1.
to illustrate the idea of Grohs and Rathmair [19] showing that the difficulty of a phase retrieval problem can be captured by a quantity from spectral geometry, the spectral gap of the Laplacian,
-
2.
then to extend this idea and show that the corresponding eigenfunction indicates where the obstruction in the phase retrieval problem lies,
-
3.
and to highlight that, by considering the growth of the next few eigenvalues, one can actually show that the “space of instabilities” is often finite-dimensional. If \(\lambda _k\) is large, then there is at most a k-dimensional subspace of functions such that f cannot be stably distinguished from \(f + g\) for any g in this subspace.
5.1 A one-dimensional toy model
Before discussing the full model in the complex plane, we introduce a very simple one-dimensional toy model for phase retrieval that will illustrate all these ideas using elementary ideas from calculus.
Toy Model. Let \(a:[0,1] \rightarrow \mathbb {R}_{>0}\) be a positive, continuous function. Suppose that \(f,g:[0,1] \rightarrow \mathbb {R}\) are two smooth real-valued functions such that
$$\begin{aligned} \int _{0}^{1} a(x) (f'(x) - g'(x))^2 dx \qquad \text{ is } \text{ small. } \end{aligned}$$Does this mean that \(f(x) \sim g(x) + c\) for some constant c?
It is clear that if \(f(x) = g(x) + c\), then the integral is 0. The condition seems to say that \(f'(x) \sim g'(x)\) for most points x. So, one would expect that, after integrating, the functions only differ by a global unknown constant (playing the role of uniqueness up to the global phase shift in phase retrieval). However, the weight a(x) could become very small in certain regions of space: The derivatives \(f'\) and \(g'\) could be very different in that small region of space and the difference might hardly be noticeable in the integral.
The analogue of the idea in [19] in this setting is to consider the spectral gap of the second-order differential operator
which, after integration by parts, can be defined as the largest constant \(c > 0\) such that
As an easy example, if \(a(x) = 1\), then the classical Wirtinger inequality can be phrased as saying
so the constant is \(c = \pi ^2\) in this case. It is now clear how we can employ this constant in our toy phase retrieval problem: We can normalize both f and g so that they have mean value 0 and then use
If the first integral is small and the constant c is not too small, then we can deduce f and g are close to each other in \(L^2\) in this very precise quantitative sense. However, as already mentioned above, problems can arise when a(x) is allowed to be small and this difficulty will be reflected in the spectral gap being small. We will illustrate this with a simple example (see Fig. 5). In this example, there is a region where a(x) is so small that the integral will not detect big changes in the derivative in that region.

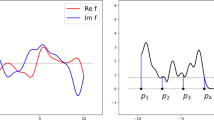
A sketch of an example of a function a(x) (left) corresponding to a difficult “toy phase retrieval problem”. There is a function \(\phi \) (right) for which \(\int _0^1 a(x) \phi '(x)^2 \,\textrm{d} x\) is small even though \(\phi \) not close to a constant
We can now illustrate our main new idea in this simple case: Further analysis shows that the spectrum of the operator \(Lu =- \frac{\textrm{d}}{\textrm{d} x} \left( a(x) \frac{\textrm{d}}{\textrm{d} x} u\right) \) has one eigenvalue 0 (corresponding to constant functions) and one very small eigenvalue, corresponding to the function \(\phi (x)\), but all the other eigenvalues are actually large. This means that:
-
1.
While the inequality
$$\begin{aligned} \int _0^1 a(x) u'(x)^2 \,\textrm{d} x \ge c\int _0^1 u(x)^2 \,\textrm{d} x \end{aligned}$$is only true for a small constant \(c>0\) when looking at all functions with mean value 0, it is actually true with a much larger constant for all functions with mean value 0 that are also orthogonal to \(\phi (x)\).
-
2.
Consequently, while (toy) phase retrieval is difficult for this problem, the only difficulty comes from the function \(\phi (x)\). Indeed, the problem is actually easy for all other functions.
-
3.
There are directions of instability but they are finite-dimensional and, in this case, one-dimensional. In particular, if \(\int _0^1 a(x) (f'(x) - g'(x))^2 \,\textrm{d} x\) is small then, in this case, we can deduce in a stable and well-posed manner that \(f(x) = g(x) + c_1\) on the left side of the interval and \(f(x) = g(x) + c_2\) on the right-hand side. This is the only source of instability.
The implications for phase retrieval are as follows. There are many classical examples of functions where phase retrieval is extremely difficult but they tend to follow the same pattern [2, 19]: The signal is strong in two different regions in time-frequency and very weak in between and it is difficult to notice phase shifts in the intermediate region. The implication of our approach is that this is, in a suitable sense, the only difficulty: The phase retrieval problem is actually easy if one is content to recover two different phase shifts (one for each region in time-frequency where the signal is strong), cf. [6]. We now make this precise.
5.2 Problem statement and preliminary discussion
For the purpose of this discussion, we assume that \(\Omega \subset \mathbb {C}\) is a bounded domain and that we have two holomorphic functions \(F_1, F_2: \Omega \rightarrow \mathbb {C}\) where we assume for the sake of simplicity that \(|F_1 |> 0\) on all of \(\Omega \). The main question to be discussed is as follows: If
on most of \(\Omega \)? Phrased differently: If two holomorphic functions share the same modulus over a large region, does this imply that one is a global phase-shift of the other? We observe that, throughout this section, the considerations do not invoke the short-time Fourier transform and are more generally applicable. This subsection may be understood as a short discussion of some of the ingredients in [19] and will set the stage for our subsequent argument. We write
and thus by defining the measure \(\textrm{d}\mu = |F_1(z) |^2 \,\textrm{d}z\), we have
We can think of the measure \(\mu \) as inducing a conformal change of the metric. Assuming \(|F_1|\) is sufficiently well behaved, this allows us to interpret the quantity as the \(L^2\)-norm of a function on a manifold. We now define the real-valued function
At this point, we can invoke the Poincaré inequality and argue that
where the Poincaré constant, see Eq. (10), is given by
and \(\lambda _1\) is the first nontrivial eigenvalue of the Laplace operator on the manifold \((\Omega , \mu )\) equipped with Neumann boundary condition [9]. Hölder’s inequality immediately implies that
with equality if and only if h is constant. In the context of phase retrieval problems considered in this paper, we are mainly interested in the setting where the domain naturally decouples into several subdomains \(\Omega = \Omega _1 \cup \Omega _2 \cup \dots \cup \Omega _k\) such that on \(\Omega _i\) we have \(F_2(z) \sim F_1(z) e^{\alpha _i}\). We observe that in this case, h is not close to a constant globally unless the \(\alpha _i\) are all close to each other (corresponding, in essence, to being close to a unified global phase shift). We also note that if \(f: \Omega \rightarrow \mathbb {C}\) is analytic in \(z_0 \in \Omega \), then
which follows immediately from recalling that the Cauchy–Riemann equations can be geometrically stated as saying that infinitesimal balls are mapped to infinitesimal balls. Therefore, applying this twice,
from which we infer
If the first term on the right-hand side were to be large, then this would imply that h is typically not small from which we immediately infer that \( F_1 \approx \textrm{e}^{\textrm{i} \alpha } F_2\) cannot be true over a large region. So we may henceforth assume that the first term is small. This leaves us with the second term: If the integral were to be large, then this would be a quantitative measure indicating that \( |F_1| \approx |F_2|\) is not true on most of the domain \(\Omega \). However, there is one remaining possibility: It is quite conceivable that the integral is also quite small which would require that \(C_{\textrm{poinc}}(2,\Omega ,w)\) is quite large. This in turn implies that \(\lambda _1\) is quite small.
5.3 The Calabi dumbbell example
An example is given in Fig. 6: the classical “dumbbell” example is a two-dimensional manifold comprised of two separate regions that are connected via a thin “bridge”. One way of seeing that the Poincaré constant for this example is large is to show that \(\lambda _1\) is small: Recall that

An example of a manifold \((\Omega , \mu )\) isometrically embedded into \(\mathbb {R}^2\): This example corresponds to the case where \(|F_1(z) |^2\) is large on two separate regions and small everywhere else (including in the area connecting the two regions). This is the prototypical example of a domain for which \(C_{\textrm{poinc}}(2,\Omega ,w)\) is large
By taking f to be constant on the left-hand side and right-hand side of the domain and by interpolating linearly in between, we see that \(|\nabla f |\) is not necessarily small but that the region over which it is actually nonzero has rather small measure. By making the “bridge” thinner, we can make \(\lambda _1\) as small as possible. The work of Cheeger then implies that the manifold \((\Omega , \mu )\) can be separated into two distinct parts. Since \(\mu = |F_1 |^2\), this simply means that \(|F_1 |\) becomes rather small in some regions and this causes the classical and familiar obstruction for phase retrieval: Indeed, when trying to do successful phase retrieval of a function whose information is stored on two separate regions and the function is close to 0 in between, it becomes very difficult to reconstruct the phase globally: Each of the regions may come with a different phase shift. Now, one could wonder whether this is indeed the only obstruction.
5.4 A refinement
Our main new idea will be to refine the inequality, valid for all real-valued \(h \in W^{1,2}(\Omega , \mu )\),
To this end, we introduce a sequence of Laplacian eigenfunctions: These are solutions of
where
is a discrete sequence of eigenvalues and n is the normal derivative.
The fundamental inequality that is then being used is
We see that in the case of functions with mean value 0, the first term vanishes and we are exactly in the setting described in Section 5.1. The main purpose is now to introduce the following refinement.
Proposition 11
Let \(k \in \mathbb {N}\) and let
denote the orthogonal projection. Then, for all real-valued \(h \in W^{1,2}(\Omega , \mu )\), we have
Proof
Let \(h \in W^{1,2}(\Omega , \mu )\) be real-valued. We can write
We note that this is an orthogonal decomposition into three mutually orthogonal subspaces. The first term gives the constant contribution. As for the other two terms, we note that
By orthogonality, we have
and thus, arguing as above,
The same line of reasoning implies
5.5 Summarizing the refinement
Proposition 11 can now be applied as follows:
-
1.
If the spectral gap — the first nontrivial eigenvalue of the Laplacian \(\lambda _1 > 1\) — is large, then the phase retrieval problem is stable (this is [19]),
-
2.
and if \(\lambda _1\) is small, the problem is generally unstable.
-
3.
However, if \(\lambda _k\) is large, then the phase retrieval problem is actually stable up to a k-dimensional subspace (see Proposition 11). This means that while phase retrieval is difficult, there are only k different profiles that are difficult to resolve,
-
4.
and these profiles are given by the Laplacian eigenfunctions.
Moreover, this scenario actually happens in all the typical examples where phase retrieval is difficult: There, usually, \(\lambda _1\) is small because of a dumbbell type construction as in Fig. 6. However, \(\lambda _2\) is already large. The only difficulty in the phase retrieval problem is distinguishing phase shifts on each side of the dumbbell but the problem is otherwise (relatively) easy and one can reconstruct the phase within each region from the magnitude up to one of two possible global phase shifts (one for each side of the dumbbell).
Notes
Here, \(\textrm{d} V\) denotes integration with respect to the Riemannian measure.
Here, \(V(\cdot )\) denotes n-dimensional volume, while \(A(\cdot )\) represents \((n-1)\)-dimensional volume.
If m is of second order and type \(\pi /2\), then \(m \cdot \mathcal {B} h^\pm \) is not guaranteed to be in the Fock space (cf. Remark 3).
For a precise explanation of how to time-shift and scale \(h_\tau ^\pm \) to obtain \(f^\pm \), the reader is referred to Appendix B.
The fractional Fourier transform of order \(\theta \in \mathbb {R}\) of a function f is given by
$$\begin{aligned} \mathcal {F}_\theta f (\xi ) = \sqrt{1 - \textrm{i} \cot \theta } \cdot \textrm{e}^{\pi \textrm{i} \cot (\theta ) \xi ^2} \int _\mathbb {R}f(t) \textrm{e}^{-2\pi \textrm{i}\left( \csc (\theta ) t \xi - \frac{\cot \theta }{2} t^2 \right) } \, \textrm{d} t, \qquad \xi \in \mathbb {R}, \end{aligned}$$where the square root is defined such that the argument of the result lies in \((-\pi /2,\pi /2]\).
References
Alaifari, R., Grohs, P.: Phase retrieval in the general setting of continuous frames for Banach spaces. SIAM J. Math. Anal. 49(3), 1895–1911 (2017)
Alaifari, R., Grohs, P.: Gabor phase retrieval is severely ill-posed. Appl. Comput. Harm. Anal. 50, 401–419 (2021)
Alaifari, R., Wellershoff, M.: Stability estimates for phase retrieval from discrete Gabor measurements. J. Four. Anal. Appl. 27, 1–31 (2021)
Alaifari, R., Wellershoff, M.: Phase retrieval from sampled Gabor transform magnitudes: counterexamples. J. Four. Anal. Appl. 28(9), 1–8 (2021)
Alaifari, R., Wellershoff, M.: Uniqueness of STFT phase retrieval for bandlimited functions. Appl. Comput. Harm. Anal. 50, 34–48 (2021)
Alaifari, R., Daubechies, I., Grohs, P., Yin, R.: Stable phase retrieval in infinite dimensions. Found. Comput. Math. 19, 869–900 (2019)
Bénéteau, C., Carswell, B.J., Kouchekian, S.: Extremal problems in the Fock space. Comput. Methods Funct. Theory 10, 189–206 (2010). https://doi.org/10.1007/BF03321762
Bojarovska, I., Flinth, A.: Phase retrieval from Gabor measurements. J. Four. Anal. Appl. 22(3), 542–567 (2016)
Chavel, I.: Eigenvalues in Riemannian Geometry. Pure and applied mathematics. Academic Press, Orlando (1984)
Cheeger, J.: A lower bound for the smallest eigenvalue of the Laplacian. Princeton Mathematical Series, vol. 55, pp. 195–199. Princeton University Press, Princeton (1971)
Dyda, B., Kassmann, M.: On weighted Poincaré inequalities. Ann. Acad. Sci. Fenni. Math. 38, 721–726 (2013)
Eldar, Y.C., Sidorenko, P., Mixon, D.G., Barel, S., Cohen, O.: Sparse phase retrieval from short-time Fourier measurements. IEEE Signal Process. Lett. 22(5), 638–642 (2014)
Gröchenig, K.: Foundations of Time-frequency Analysis, 1st edn. Applied and Numerical Harmonic Analysis. Birkhäuser, Boston (2001)
Grohs, P., Liehr, L.: Stable Gabor phase retrieval in Gaussian shift-invariant spaces via biorthogonality (2021). arXiv:2109.02494
Grohs, P., Liehr, L.: Non-uniqueness theory in sampled STFT phase retrieval (2022). arXiv:2207.05628
Grohs, P., Liehr, L.: Phaseless sampling on square-root lattices (2022). arXiv:2209.11127
Grohs, P., Liehr, L.: On foundational discretization barriers in STFT phase retrieval. J. Four. Anal. Appl. 28(39), 1–21 (2022)
Grohs, P., Liehr, L.: Injectivity of Gabor phase retrieval from lattice measurements. Appl. Comput. Harm. Anal. 62, 173–193 (2023)
Grohs, P., Rathmair, M.: Stable Gabor phase retrieval and spectral clustering. Commun. Pure Appl. Math. 72(5), 981–1043 (2019)
Grohs, P., Liehr, L., Rathmair, M.: Multi-window STFT phase retrieval: lattice uniqueness (2022). arXiv:2207.10620
Iwen, M., Perlmutter, M., Sissouno, N., Viswanathan, A.: Phase retrieval for \({L}^2 ([-\pi , \pi ])\) via the provably accurate and noise robust numerical inversion of spectrogram measurements. J. Four. Anal. Appl. 29(1), 8 (2023)
Iyer, V.G.: A note on integral functions of order 2 bounded at the lattice points. J. Lond. Math. Soc. s1–11(4), 247–249 (1936)
Li, L., Cheng, C., Han, D., Sun, Q., Shi, G.: Phase retrieval from multiple-window short-time Fourier measurements. IEEE Signal Process. Lett. 24(4), 372–376 (2017)
Pfander, G.E., Salanevich, P.: Robust phase retrieval algorithm for time-frequency structured measurements. SIAM J. Imaging Sci. 12(2), 736–761 (2019)
Pfluger, A.: On analytic functions bounded at the lattice points. Proc. Lond. Math. Soc. s2–42(1), 305–315 (1937)
Průša, Z., Holighaus, N.: Phase vocoder done right. In: 2017 25th European Signal Processing Conference (EUSIPCO), pp. 976–980. IEEE, Kos, Greece (2017)
Salanevich, P.: Injectivity of multi-window Gabor phase retrieval (2023). arXiv:2307.00834
Titchmarsh, E.C.: The Theory of Functions, 2nd edn. Oxford University Press, Amen House, London E.C.4 (1939)
Toft, J.: Continuity properties for modulation spaces, with applications to pseudo-differential calculus – I. J. Funct. Anal. 207(2), 399–429 (2004)
Wellershoff, M.: Injectivity of sampled Gabor phase retrieval in spaces with general integrability conditions (2021). arXiv:2112.10136
Wellershoff, M.: Phase retrieval of entire functions and its implications for Gabor phase retrieval (2022). arXiv:2202.03733
Wellershoff, M.: Sampling at twice the Nyquist rate in two frequency bins guarantees uniqueness in gabor phase retrieval. J. Four. Anal. Appl. 29(1), 7 (2023)
Acknowledgements
The authors would like to thank Alessio Figalli for fruitful discussions on isoperimetric inequalities and Cheeger constants.
Funding
Rima Alaifari, Francesca Bartolucci and Matthias Wellershoff would like to acknowledge funding through the SNSF Grant 200021_184698. Stefan Steinerberger was partially supported by the NSF (DMS-2123224) and the Alfred P. Sloan Foundation.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Communicated by Mark Iwen.
Appendices
Appendix A: List of symbols
-
\(\mathcal {V}_\psi f(x,\omega )\): Short-time Fourier transform defined in Eq. (1).
-
\(\varphi \): Normalized Gaussian.
-
\(\mathcal {G} f(x,\omega )\): Gabor transform defined in Eq. (2).
-
\(\mathcal {A}_\Omega (f)\): Phase retrieval operator defined in Sect. 1.
-
\(\mathcal {M}_\nu (\mathbb {R}^2)\): Set of \(\nu \)-locally stable signals defined in Question 1.
-
\(M^p(\mathbb {R})\): Modulation spaces defined in Eq. (3).
-
\(\Vert f \Vert _{M^p(\mathbb {R})}\): Norm in the modulation spaces defined in Sect. 2.
-
\(f \sim g\): Equivalence up to global phase defined in Eq. (4).
-
\({\text {T}}_x\): Translation operators defined in Eq. (5).
-
\({\text {M}}_\omega \): Modulation operators defined in Sect. 2.
-
\({\text {R}}_\theta \): Rotation operators defined in Eq. (6).
-
\(\mathcal {F}^2(\mathbb {C})\): Fock space defined in subsection 2.1.
-
\(\mathcal {B}\): Bargmann transform defined in subsection 2.1.
-
\(\Delta \): Laplace–Beltrami operator.
-
\(0 = \lambda _0< \lambda _1 < \dots \): Eigenvalues of the Laplace–Beltrami operator.
-
\(L^p(\Omega ,w)\) and \(W^{k,p}(\Omega ,w)\): Weighted Lebesgue and Sobolev space defined in subsection 2.2.
-
\(C_{\textrm{poinc}}(p,\Omega ,w)\): Weighted Poincaré constant defined in Eq. (10).
-
\(F_\Omega ^w\): Mean of a function F defined in subsection 2.2.
-
\(w(\Omega )\): Weight of a set \(\Omega \) defined in subsection 2.2.
-
\(\Vert F \Vert _{\mathcal {D}_{p,q}^{1,4}(\Omega )}\): Polynomially weighted Sobolev norm defined in Eq. (12).
-
\(h_{p,\Omega }(f)\): Cheeger constant defined in subsection 2.2.
-
\(\mathfrak {C}(\Lambda )\): Class of counterexamples defined in Definition 1.
-
\(h^\pm (t)\): Original counterexamples to uniqueness in sampled Gabor phase retrieval defined in Eq. (15).
-
\(c_{p,\Omega }(f)\): Local Lipschitz constant defined in Eq. (21).
Appendix B: Time-shifting and scaling the counterexamples
In Sect. 3.1, we show that the functions \(h_\tau ^\pm = \mathcal {B}^{-1} ( \textrm{e}^{\pi \tau \cdot } \cdot \mathcal {B} h^\pm ) \in L^2(\mathbb {R})\) — where \(h^\pm \) are defined in Eq. (14) and \(\tau \ne 0\) — are counterexamples to sampled Gabor phase retrieval on \(\mathbb {R}\times a \mathbb {Z}\). Additionally, we claim that by applying time-shift and scaling operations to \(h_\tau ^\pm \), we can obtain the counterexamples \(f^\pm _\gamma = \varphi \pm \textrm{i} \gamma {\text {T}}_{1/a} \varphi \), where \(\gamma > 0\). The proof of this claim is presented in the following.
As a first step, we express \(h_\tau ^\pm \) as a linear combination of two time-shifted Gaussians. To do so, we recall from Sect. 3.1 that the Bargmann transforms of \(h^\pm \) are given by
Therefore, the relation of the Gabor and the Bargmann transform implies that
for \((x,\omega ) \in \mathbb {R}^2\), where we completed the square in the exponent in the final equality.
According to the covariance property of the Gabor transform (cf. [13, Lemma 3.1.3 on p. 41]) and Eq. (16), it holds that
for \(\alpha \in \mathbb {R}\) and \((x,\omega ) \in \mathbb {R}^2\). Therefore,
which implies
as desired.
Finally, we can time-shift and scale \(h^\pm _\tau \) appropriately: In particular, we have
which exactly corresponds to \(f^\pm _\gamma = \varphi \pm \textrm{i} \gamma {\text {T}}_{1/a} \varphi \) with \(\gamma = \textrm{e}^{\pi \tau / a}\). The fact that the functions \(f_\gamma ^\pm \) are counterexamples to sampled Gabor phase retrieval on \(\mathbb {R}\times a \mathbb {Z}\) follows from the invariance of \(\mathfrak {C}(\mathbb {R}\times a \mathbb {Z})\) under time-shifts and scalar multiplication. Alternatively, one may show that \(f_\gamma ^\pm \in \mathfrak {C}(\mathbb {R}\times a \mathbb {Z})\) by direct computation (cf. the proof of Lemma 2).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alaifari, R., Bartolucci, F., Steinerberger, S. et al. On the connection between uniqueness from samples and stability in Gabor phase retrieval. Sampl. Theory Signal Process. Data Anal. 22, 6 (2024). https://doi.org/10.1007/s43670-023-00079-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43670-023-00079-1
Keywords
- Gabor transform
- Phase retrieval
- Sampled Gabor phase retrieval
- Poincaré inequality
- Cheeger constant
- Laplace eigenvalues
- Bargmann transform
- Counterexamples