
Abstract
Investigation into the energy consumption in electric vehicles (EVs) plays a pivotal role in determining their autonomy and assessing the electric system performance across diverse operational scenarios. This study focuses on the concept of energy regeneration, encompassing the recovery and storage of kinetic mechanical energy during braking or descent in EVs. Employing control systems in power electronics becomes necessary to establish a seamless workflow across operational quadrants to ensure efficient energy regeneration in an electric machine functioning as both a motor and a generator. To seamlessly integrate new technologies into practical applications, it is essential to conduct thorough evaluations in laboratories prior to deployment. This paper introduces an experimental platform specifically designed to analyze energy consumption and storage in EVs by emulating their powertrains in a controlled laboratory environment. The platform comprises key components for emulating the powertrain of a single-motor electric vehicle with single-axle traction, including a power converter configured in two quadrants, an energy storage system, a primary rotating electric machine, and a mechanically coupled point load torque (another motor). This paper provides a detailed guide on implementing such a laboratory and for facilitating the testing of diverse motor technologies and controllers under varied operational conditions. This comprehensive approach allows for the assessment of electromechanical system efficiency, focusing on both energy recovery and comprehensive control of electric power converters. Validation tests conducted under urban conditions and on steep terrains demonstrate the effectiveness of the platform in analyzing the energy efficiency of both the induction machine and the power controller.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The development of electric mobility has become a priority for reducing polluting emissions and for promoting more sustainable transportation. One of the most direct and effective measures to decrease greenhouse gas emissions is the substitution of conventional vehicles with internal combustion engines with electric vehicles with an electric powertrain. This transition represents a significant shift in how vehicles operate, and how they can substantially reduce the impact of CO2 emissions. The conversion of a vehicle weighing approximately one ton is taken as an example [1]. According to a study presented in [2], these vehicles travel between 75,000 and 135,000 km over a 5-year period. Thus, for this specific category, a single converted vehicle would avoid emitting between 8.7 tons and 15.66 tons of CO2 during this time period. This is in comparison with the combustion data provided in [3]. These figures highlight the positive impact that a massive use of electric vehicles could have in terms of emissions reduction. This measure brings environmental benefits by reducing greenhouse gas emissions and contributes to improving air quality by reducing local pollution. Moreover, transitioning to electric vehicles decreases reliance on fossil fuels and encourages the adoption of renewable energy in the transportation sector.
Electric mobility is a global topic that is currently being investigated in various industrial and academic research centers. In this sense, it is possible to find contributions that are mainly focused on the engine technology that drives electric vehicles. For instance, a study that developed the control of a brushless DC motor for implementation with embedded systems was given in [4]. Other research studies have focused on the design and simulation of an electric traction system for two-seater electric vehicles using an asynchronous machine [5]. However, these studies lack experimental validation. The same situation occurred in a study that considered the powertrains of pure electric vehicles [6], where no tests with physical prototypes were carried out. The common denominator in the aforementioned contributions is that they were limited to developing models that were implemented only in simulations, without any experimental validation. Another example of this trend is given in [7], which deals with the speed control of an electric vehicle using a PI controller. However, it also lacks experimental testing.
Additionally, several studies have addressed energy regeneration in electric vehicles to improve autonomy and reduce dependence on the electric grid. A comparative study was presented in [8] that evaluated a constant kinetic regeneration system, concluding that it consumed 42.9% more power than traditional regenerative braking due to the increased mass of the vehicle. In addition, a study in [9] highlighted the importance of kinetic devices such as regenerative braking and KERSs (Kinetic Energy Recovery Systems), generating electrical energy to reduce reliance on the electric grid and to improve battery efficiency. Another study that explored energy regeneration in vehicle suspension systems was presented in [10]. In this case, the study emphasized technologies for thermal energy recovery, regenerative braking, and hydraulic shock absorber vibrations, underscoring the need to overcome design and storage challenges. Furthermore, a report in [11] quantified the energy regeneration capacity in vehicles with stochastic vibration, showing potential for fuel savings and CO2 emissions reduction. These studies outline sustainability and energy efficiency in the electric vehicle industry.
In particular, energy regeneration in induction motors is a relevant topic for improving energy efficiency in various industrial applications, especially in transportation, as demonstrated in conventional trains and high-speed vehicles [12]. Comparative studies have highlighted the importance of energy efficiency by proposing speed control systems with regenerative braking, which allows the recovery and return of surplus energy to the electric grid [13, 14]. These research efforts bolster sustainability and energy efficiency in industry and transportation, advancing energy regeneration in induction motors.
The primary focus of this study is the development of an experimental test platform aimed estimating regenerated energy to enhance electric vehicle autonomy. The platform is designed to quantify machine power and to emulate electric vehicle powertrains, allowing for the efficient testing of EV efficiency. It incorporates a pulse-controlled three-phase inverter to ensure optimal stability for the control of the induction machine. Additionally, a pendulum machine is integrated to simulate mechanical conditions and to generate applied torque.
The test platform utilizes a bidirectional DC source as the main power, enabling the asynchronous machine to function both as a motor and a generator. Direct tests on the platform involve implementing FTP75 standards and challenging terrain tests to assess the behavior and performance of the electric propulsion system under varied operating conditions.
The work presented in this article shares similarities with the study in [15], which employs a numerical control approach for powertrain emulation. In that research, the electrical parameters were analyzed under various driving profiles using a cascaded configuration of two inverters to emulate an electric machine. In comparison, the present article directly addresses the emulation of a real rotating machine, allowing for the consideration of the other relevant physical aspects in an electric vehicle. It is noteworthy that most of the previously published works on electric vehicles focused on simulations without physical implementations. This suggests that there are valuable contributions that can be tested on experimental platforms, such as adaptive cruise control incorporating regenerative braking in intelligent electric vehicles [16], optimal energy management considering thermal factors [17], or different braking regulation strategies to maximize energy recovery [18].
The remainder of this paper is organized as follows. The emulation of the electric powertrain of a vehicle using a single motor and its basic structure are explored detail in Sect. 2. Next, the core of this study is presented. The experimental platform is presented in Sect. 3, where both the power electronics system and the mechanical system are described, along with a communication module that integrates both of these systems. In Sect. 4, tests on this platform are conducted with a focus on analyzing the power, speed, and energy regeneration behavior of the overall system. These tests make it possible to evaluate the performance and energy efficiency. Finally, in Sect. 5, some conclusions derived from the conducted tests are presented.
2 Electric vehicle powertrain description
The basic structure of the powertrain of a single-motor electric vehicle is shown in Fig. 1. It consists of three essential elements: an electric machine, a power controller, and a rechargeable energy source.

Structure of a single motor-driven electric vehicle
First, the electric machine plays a crucial role since it is responsible for generating the motion necessary to propel the vehicle. It acts both as a motor to provide the force for movement and as a generator to allow energy recovery during braking, decelerations, or when the vehicle maintains its speed while going downhill.
The second element is the bidirectional power converter, which plays a vital role in controlling the flow of energy between the electric machine and the energy source. Its main function is to convert the direct current electrical energy coming from the battery into alternating current electrical, enabling the generation of vehicle motion. Similarly, during energy recovery, the power controller reverses the process, converting the alternating current electrical energy generated by the machine back into direct current electrical energy, which allows it to be stored in the rechargeable energy resource.
Finally, the rechargeable energy resource is responsible for supplying the energy necessary to start and move the vehicle. This resource typically consists of rechargeable battery modules, which can be charged from an external energy source or through energy recovery during driving. These battery modules store the electrical energy that needs to be used by the electric machine and the overall system.
It is important to note that the above description focuses explicitly on the basic structure of a vehicle from an electrical perspective, leaving out the mechanical components that are also fundamental to its operation. Among these key mechanical elements are the gearbox, the differential, and the driveshaft, which play an important role in the overall performance and efficiency of the vehicle.
3 Vehicle physics
It is important to describe the forces acting on a vehicle, as shown in Fig. 2, since they are closely linked to the electrical effort that the system must exert to directly affect the torque that the main machine must generate. These forces are considered in the tests carried out in Sect. 4, where different slopes are emulated to which the machine must respond. To simulate uphill slopes, active power modeled as positive torque is drawn. Meanwhile, for downhill slopes, active power modeled as negative torque is supplied.

Free body diagram
In this section, the modeling of the basic forces present in an electric vehicle is performed. The analysis is focused on translational mechanical aspects, including the transmission, the wheels, and the total mass of its components. The forces considered are the rolling resistance (Frr), the air drag (Fad), the component of the vehicle weight along the slope (Fhc), and the traction generated by the vehicle (Fte), as shown in Fig. 2.
The mathematical model for the force of rolling resistance (Frr) is represented by Eq. 11, where µrr is the coefficient of friction, m is the mass of the vehicle in kg, g = 9.8 m/s2 is the acceleration due to gravity, θ is the angle of inclination of the slope, and v is the linear velocity of the vehicle.
The force due to air drag (Fad) is calculated using Eq. 2. In this equation, ρ = 1.25 kg/m3 is the density of air, A is the frontal area of the vehicle in m2, and Cd is the aerodynamic drag coefficient (dimensionless).
The force of the vehicle weight component (Fhc) along the slope is described by Eq. 3.
Applying Newton’s second law to the vehicle using Eqs. 11, 2, and 3, it is possible to obtain the differential equation that relates the traction force (Fte) with the vehicle velocity (v), as shown in Eq. 4.
This model is useful for determining the required traction force that the engine must generate to achieve a desired speed and acceleration. The authors of [19] addressed important aspects related to the electric motor, transmission system, and forces affecting the vehicle. It used Newton’s second law to obtain the differential equation that is related to the traction force with the vehicle velocity. It emphasized the importance of calculating the required torque to propel the vehicle through the dynamic radius of the wheel, as well as the power required to maintain the maximum speed considering the maximum load of the vehicle.
4 Experimental platform description
In general, the experimental platform consists of two main systems for emulating the basic structure of the powertrain of a single-motor electric vehicle as shown in Fig. 1. The first system is the mechanical part, which encompasses everything related to rotating electrical machines and their corresponding control module. The second system is the electrical and electronic part of the system.
These two systems work together to create a comprehensive monitoring system for the platform. Additionally, there is one last system that is of the utmost importance: a small communication module that establishes the transfer of torque and speed data between the mechanical control and the electronic control units using optical fiber.
-
1.
Mechanical part of the system: comprises elements related to the mechanical losses, the generation of motion, and the presence of torque in the system.
-
2.
Platform rack: this rack houses the sensor components of the system, the three-phase inverter, the bidirectional power supply, the control signal coupling devices, and the additional sources required for the proper operation of the system.
-
3.
Communication board: this board enables interconnections and communication between the different systems and components of the platform. It is responsible for ensuring the transmission of data and signals between the mechanical control module and the OPAL RT.
-
4.
Monitoring center: provides visual information and relevant data on the performance of the system.
Figure 3 shows the implemented hardware of the experimental platform, where the energy source or batteries of the electric vehicle are emulated using a bidirectional direct current (DC) source. This source allows the simulation of energy supply and recovery, which imitates the behavior of real electric vehicles. Besides the energy source, a power controller is required to manage the energy coming from the source and to apply it appropriately to the rotating electrical machine. It is essential to note that there is no direct reference to a specific motor, since this prototype is designed to function both as a propulsion motor, and as a generator for energy recovery. Therefore, the power controller must efficiently handle both operating modes.

Implemented experimental platform
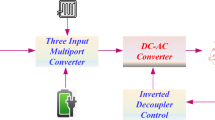
The integration of the components in this prototype allows for the emulation of electric vehicle powertrains and facilitates testing and analysis in a controlled environment. The described configuration is represented in Fig. 4. The bidirectional source is connected and powered by an electrical grid, and an inverter is used to control the voltage and current on the DC bus of the source. Additionally, the inverter has a hierarchical speed control that establishes the voltage–frequency relationship of the converter, which makes it possible to control the speed of the pendulum machine and cancel its natural slip.

General block diagram of the prototype
The induction machine is mechanically coupled to the rotation axis of the pendulum machine to establish the mechanical torque. This torque is monitored by a control module that sends speed information to the overall Opal RT system and receives mechanical torque information through an optical fiber communication board. With this configuration, the complete emulation of the propulsion and energy recovery systems of an electric vehicle is achieved, enabling precise testing and analysis in a controlled environment.
5 Electronic power converter
The hardware used in the power system is shown in Fig. 5, which consists of the following components:

Platform rack
-
1.
Opal RT [20]: this device is used for the real-time control and simulation of the system. It provides rapid prototyping capabilities and allows for adjustments and testing in the electrical system.
-
2.
Direct Current (DC) power supply: this power supply is used to bias the optocouplers of the inverter. It provides the necessary energy for proper functioning.
-
3.
Bidirectional power source [21]: the bidirectional power source supplies direct current to the system bus and is synchronized with an electrical grid. It allows for a bidirectional energy flow between the system and the grid.
-
4.
System sensors and galvanic decoupling of the control signals: these sensors are used to acquire relevant information from the system, such as current and voltage, and to provide feedback to the control system. Additionally, galvanic decoupling of the control signals ensures safe electrical separation and prevents unwanted interference.
-
5.
Inverter [22] and LC filter at the output: the three-phase inverter is a key component in the system and it is connected to the asynchronous machine. It acts as a bidirectional converter, allowing for the energy flow between the system and the machine. Additionally, an LC filter is used at the output to improve the quality of the output signal, eliminating possible harmonics and unwanted noise.
These components are part of the power system and they perform specific functions to ensure the efficient and safe operation of the electrical system.
The system uses a hierarchical control loop structure to manage the load of the inverter [23], specifically the induction machine. These control loops refer to the voltage/frequency provided by the speed controller, which allows for the elimination of the slip inherent in the nature of the machine, and enables more precise control during planned tests.
Figure 6 shows the hierarchical implementation of the voltage and current controls in the inverter. These controls are manipulated by two key reference signals: the desired operating frequency and the required voltage amplitude. Thanks to this control structure, it is possible to achieve direct and precise handling of the induction machine throughout its operating range.

Control scheme of the power drive
The overall sampling frequency of the system or controller is 100 kHz. The IGBTs of the power electronics configuration are switched at 10 kHz through subsampling, which is performed directly at the digital output port of the controller.
The voltage control has the essential function of regulating and maintaining the output voltage amplitude of the inverter at a desired level, which ensures a stable and reliable power supply for the induction machine. On the other hand, the current control is responsible for regulating and monitoring the output current of the inverter, ensuring optimal and safe machine operation.
The hierarchy in the implementation of these controls allows for efficient and precise management of the induction machine. The frequency reference signal determines the operating speed of the machine, which in turn affects its performance and responsiveness under different load conditions. On the other hand, the voltage amplitude reference signal makes it possible to adjust the power delivered by the inverter to the machine, adapting it to the specific needs of the system.
6 Communication board
The integration of the electrical part with the mechanical part generates electromagnetic interference due to discrepancies in the grounds of the LD Didactic and Opal RT devices. A specific communication board is required to solve this problem and to ensure safe and synchronized operation between the components.
The board acts as a bridge, preventing electrical failures and improving the reliability of the system. It allows for effective integration of the electrical and mechanical systems, ensuring smooth and risk-free operation during optical transmissions.
The block diagram in Fig. 7 shows the connection of devices through optical fiber channels, which carry modulated digital data. The gray and orange colors represent the connection to the ground of the mechanical module (LD DIDACTIC) and the power control (Opal RT), respectively.

Representation of the systems involved in the designed optical communication
The communication board used a Raspberry Pi Pico microcontroller, as can be seen in Fig. 8, with a RP2040 Chip and a Successive Approximation Register (SAR) ADC [24] for analog-to-digital conversion. The SAR ADC includes a DAC to generate a comparison voltage, SAR logic, and a comparator for comparisons during conversion, which ensures accuracy in the digital representation of the analog signal.

Communication board associated with Fig. 7
After analog-to-digital conversion, pulse width modulation (PWM) [25] is used to efficiently transmit digital data. In addition to PWM, there are other modulation techniques such as pulse amplitude modulation (PAM) and pulse position modulation (PPM) [26, 27]. PAM modulates the pulse amplitude to efficiently transmit data digitally, while PPM modulates the temporal position of the pulses, which offers a high temporal resolution in high-speed communication systems.
In the communication system, the data transmission rate using PWM, for both the input and output of the controller, is equal to the overall sampling frequency of the system, 100 kHz.
7 Mechanical system
Figure 9 shows the hardware used in the mechanical system, which is composed of the following components:

Mechanical system hardware
-
1.
Pendulum machine control module [28]: this module is responsible for controlling the operation and parameters of the pendulum machine, which allows for the emulation of different test profiles for the powertrain.
-
2.
Pendulum machine: this is the main component used to emulate the mechanical loading conditions present in a vehicle. The pendulum machine is specifically coupled for this purpose and it plays a crucial role in emulating the powertrain of an electric vehicle.
-
3.
Asynchronous machine: this is a central part of the vehicle emulation.
-
4.
Communication module: this component is essential for establishing communication between the mechanical control module and the Opal RT.
This system emulates the conditions experienced by an electric vehicle through a pendulum machine that imposes a variable load for simulating braking situations and terrain changes. The main motor of the electric vehicle in this specific case is a 0.25 kW induction machine capable of generating up to 1.4 Nm of torque. Vacuum and locked rotor tests were conducted on this particular machine to evaluate the power losses [29].
8 Squirrel cage induction machine tests
In the characterization process of a squirrel cage induction motor, three fundamental tests were conducted: a Direct Current (DC) Test, a No-Load Test, and a Blocked Rotor Test according to the IEEE 112-2004 standard, based on [29]. These tests provide valuable information about the performance and electrical characteristics of the motor.
The Direct Current (DC) Test was carried out to measure the stator resistance of the motor. An ammeter, a voltmeter, and a variable power supply were used for this test. The stator equivalent circuit was reduced using star-delta conversion to facilitate measurements. The measurements yielded a stator resistance (RDC) of 30.4878 ohms. A temperature correction was applied at 53 °C, based on the ambient temperature at the moment [30] of 13 °C, which resulted in a final resistance (Rs) of 32.6026 ohms, considering the capacity of the motor to withstand a temperature increase of up to 40 °C above ambient temperature.
The No-Load Test was performed to evaluate rotational losses and to obtain information about the core parameters of the motor. During this test, the motor ran without a load on the shaft, and was supplied with the rated frequency and voltage at the stator. The stator copper losses (Ppce) were calculated from measurements and were found to be 82.7845 W. The no-load power (P0) was obtained by summing the stator copper losses, core losses 7 (Pcore), friction and windage losses (PFyR), and miscellaneous losses (Pmiscellaneous). In this case, the equivalent circuit was reduced to the circuit shown in Fig. 10, where the output resistor is in parallel with the magnetizing reactance (XM) and the core losses (RC).

Equivalent circuit of the induction machine
The Blocked Rotor Test was conducted to determine the parameters of the equivalent circuit of the motor. Under this condition, the slip is equal to 1 and the load resistance R2 tends to zero. The measurements yielded an active power of 85.79 W and a reactive power of 64.81 VAr. A blocked rotor resistance (RRB) of 2.8698 ohms and a blocked rotor reactance (XRB) of 21.3820 ohms were obtained. The stator reactance (X1) and the rotor reactance (X2) were determined from the normalized reactance ratio (X1/X2=0.67).
The circuit can be represented as a series combination of X1, Rs, X2, and RR, as shown in Fig. 11.

Equivalent circuit of the induction machine without the core branch
Through these tests, the squirrel cage induction motor was characterized. The stator resistance, mechanical losses such as power losses in the stator, and parameters of the equivalent circuit of the motor were obtained.
9 Frequency sweep
Various test scenarios are carried out to analyze the behavior of the machine at different speeds. Speed steps of 150 RPM will be executed, which corresponds to jumps of 5 Hz in the power controller. These speed changes make it possible to evaluate the performance and response of the machine under different conditions.
In the bottom right section of Fig. 12, a specific example of the performed frequency sweep is shown. It displays the reference speed and the output speed. The output speed was measured using a differential probe, which explains the presence of noise in the signal.

Speeds under no load
Throughout the frequency sweep, a clear slip in the machine was observed, especially at low speeds, where a high slip percentage was evident. Additionally, in the graph on the left side of Fig. 12, a constant speed difference was observed. It is referred to as “pedestal,” and it can be attributed to inherent machine characteristics.
Within the same speed range, the corresponding information for active and reactive power handled by the machine was captured. In Fig. 13, it can be observed that the active power steps exhibit an overshoot in the steady-state, as seen on the right side of Fig. 13. Meanwhile, the behavior of the active power, shown on the left side, indicates a linear relationship with respect to the speed, and shifts levels if the load is increased or decreased.

Power under no load
In terms of the reactive power behavior, it changes with respect to speed but in a non-linear manner. For speeds below 1800 RPM, the reactive power remains in a positive region. However, at higher speeds, the reactive power becomes negative and with a higher magnitude.
10 Dynamic model of the induction machine
Next, a dynamic model of the asynchronous machine is presented, aiming to describe the behavior and operation of this type of machine. Through this model, solid mathematical support is sought to analyze and understand the different variables involved in the operation of the machine.
The stationary reference frame is used to build a simulation model of a three-phase induction motor in MATLAB/Simulink. This model makes it possible to perform comparison tests about the transient performance of the motor, including the main flux saturation [31]. The d-q equivalent circuit of the induction machine is shown in Fig. 14.

Equivalent d-q circuit of the squirrel cage induction machine
According to this model, the modeling equations in the flux linkage form are as described in Eqs. 5, 6, and 7.
For a squirrel cage induction machine, Vqr and Vdr are set to zero. The modeling equations in the state-space form become:
The six presented Eqs. (8, 9, 10, 11, 12 and 13) provide a comprehensive model of the dynamic behavior of the squirrel-cage induction machine. These equations describe the time evolution of the rotor and stator quadrature and direct axis fluxes, as well as the rotor angular velocity, as a function of variables such as the voltages, angular velocities, resistances, reactances, and torques. The interrelationship between the fluxes and the angular velocity provides a complete overview of the dynamic behavior of the system, enabling a detailed analysis and the design of control systems for induction machines under a variety of loading conditions.
11 Test and results
A test was conducted on the platform using the speed and torque profile of the FTP75 driving cycle [32] without speed control. This driving cycle has also been used for fault detection and analysis in a study that evaluates the behavior of an electric vehicle when the inverter fails [33]. As observed in Fig. 15, the FTP75 profile was applied to the rotational speed of the induction machine, eliminating the zero speed from the profile, since it is not necessary for electric vehicle applications where motor heating is not required. In this configuration, the slip of the system can be observed, especially at low speeds when the system is transitioning from a steady state.

Speed under the urban driving profile FTP75
Regarding the electrical variables at the electrical connection point of the machine, it can be observed in Fig. 16 that the active power undergoes significant changes due to the dynamics of the system, even reaching negative values. This behavior results from regenerative braking, which occurs due to the inertia present in the system. The machine switches from operating as a motor to operating as a generator several times, causing this change in active power. In terms of the reactive power, it is positive at speeds below 1800 RPM. Meanwhile, its magnitude becomes negative at higher speeds.

Power analysis under the urban driving profile FTP75
A test was carried out using a speed profile developed by the authors, as shown in Fig. 17, which takes into account smoother speed changes under different torque conditions. This test emulates the behavior of ascending or descending slopes, where the mode change of the machine is significant. Additionally, speed control was applied, which eliminated the slip of the machine under various speed and torque conditions, as long as there were no abrupt changes in these conditions.

Speed under different mechanical torque conditions with speed control (topology test with different slope angles, steep road test)
The implementation of speed control introduces new dynamics in the behavior of the system, which is reflected in the active power graph with the presence of additional oscillations as shown in Fig. 18. In this graph, the negative region can be clearly seen, where the electric machine returns energy to the system through regeneration, especially when descending a slope. The reactive power graph shows the same behavior described above.

Active and reactive power of the three-phase point (topology test with different slope angles, steep road test)
Additionally, the speed control was subjected to tests using the FTP75 driving cycle, which presents abrupt changes more frequently (between each transition). These sudden alterations cause the system to experience drastic variations. As a result, the control does not perform optimally, as can be observed in Fig. 19 where the motor speed does not follow the reference in certain areas. This aspect is highlighted to identify a possible direction for future work focused on developing a more modern and robust controller capable of responding more quickly and effectively to fluctuations in any test.

Speed under the urban driving profile FTP75 with speed control
The most interesting observation from the work presented in this article is a table of the additional percentage of distance that a vehicle can cover under these profiles. For example, in an urban driving cycle, where energy regeneration mainly depends on braking, the configuration presented in this paper demonstrates the ability to increase the range by approximately 5% with a load established by the FTP75 driving cycle.
Equation 14 represents the calculation of the additional percentage that a vehicle can cover by analyzing the active power in the induction machine. In this calculation, both the positive and negative regions of the active power are taken into account, which correspond to the regeneration mode (generator mode) and the motor mode, respectively. Thus, a relationship between energy consumption in these two modes is established.
Furthermore, when analyzing the highway driving cycle, which includes different slopes, the same configuration shows a significant increase of approximately 23% in range. These results (Table 1) highlight the efficiency and improved performance that can be achieved with the proposed configuration.
The uncertainty analysis of the presented results primarily centers on variations introduced by the implementation of the speed control. The inclusion of this control significantly alters the system dynamics, as reflected in the behavior of the active and reactive power of the motor. Notably, additional oscillations in the active power and the presence of negative values, which are indicative of energy regeneration, are observed. These changes can be attributed to the response of the controller to abrupt speed and torque variations inherent in the driving cycles used in the tests.
Although the implementation of speed control allows for the elimination of motor slip and an overall improvement in system performance, it introduces new sources of uncertainty. The ability of the controller to swiftly and effectively respond to changes in operating conditions becomes crucial for maintaining system stability and efficiency. Consequently, there is a suggestion to concentrate efforts on developing a more robust and modern controller capable of adapting to the variations present in real driving cycles. This approach aims to address uncertainties and to enhance the overall reliability and consistency of system performance.
12 Conclusions
Tests conducted in this paper provided valuable insight into the behavior of induction machines, inverter control, and system efficiency under various speed and load conditions, including energy regeneration during braking and descending slopes.
The emulation platform was shown to be a crucial tool for investigating the electrical systems in vehicles of this type, encompassing the electric machine, the power system, and the battery emulation using a bidirectional energy source. The implementation of control and monitoring devices was shown to facilitate precise and efficient power management and mechanical control of the system.
This study demonstrated that the energy recovery in vehicles extends beyond braking, encompassing energy capture during inertia, revealing a significant amount of energy dissipated as heat and friction. Energy regeneration systems in vehicles can effectively recuperate this energy, leading to reduced pollutant emissions, decreased reliance on fossil fuels, and enhanced efficiency as well as autonomy of electric and hybrid vehicles.
It has been further observed that energy regeneration during inertia is particularly effective in scenarios involving constant deceleration, such as descending slopes or approaching traffic lights. This optimizes energy recovery and minimizes efficiency loss in the propulsion system.
This study focused on energy regeneration in a specific vehicle configuration and under controlled conditions. Further research is warranted to investigate the performance and applicability of energy regeneration systems in a wider range of vehicles and driving scenarios.
The emulation platform utilized simplified models of certain components, such as the battery. More sophisticated models should be able to provide a more accurate representation of system behavior and enable the exploration of advanced energy management strategies.
Future work includes the implementation of robust GPI controllers for the field-oriented control of induction machines, along with saturation handling schemes. This platform extension aims to improve the ability of a controller to adapt to variable operating conditions and to optimize system efficiency. The incorporation of robust GPI controllers should allow for more effective addressing of uncertainties and variations in the driving environment.
References
pruebaderuta.com. Segmentos en el automóvil. https://www.pruebaderuta.com/segmentos-en-el-automovil.php
Muñoz, J.: ¿qué kilometraje debería tener un carro anualmente? (2023). https://www.autofact.com.mx/blog/comprar-carro/antecedentes/kilometraje-promedio-por-ano
km77. km77 - marcas de coches en el mercado espaol (2023). https://www.km77.com/coches
Ghignone, R.A., Calá, F.J., Giampetruzzi, J.G., Domanico, S.M., Juarez, C.G.: Brushless dc motor control for electric vehicles using a dual core microcontroller (2019). http://elektron.fi.uba.ar
Loja, J.J.L., Ochoa, L.A.M.: Diseño y simulación de un sistema de tracción eléctrica para un vehículo eléctrico biplaza (2021)
Karki, A., Phuyal, S., Tuladhar, D., Basnet, S., Shrestha, B.P.: Status of pure electric vehicle power train technology and future prospects. Appl. Syst. Innov. 3(3) (2020). https://doi.org/10.3390/asi3030035. https://www.mdpi.com/2571-5577/3/3/35
Cruz, J.E.E., Soto, L.D.C., Carbajal, F.B., Cambero, I.J.R., Perez, A.C.: Dynamic modeling and pi speed control´ applied to an electric vehicle contemplating opposition external forces. Pistas Educativas 44(144) (2023)
Monroy, C.C., Siachoque, C.A., Duran-Tovar, I.C., Rafael, A., Guerra, M.: Comparative study of a regenerative braking system and regeneration with constant kinetic energy in battery-based electric vehicles (2020). https://doi.org/10.14483/23448393.16620
Varela-Chávez, C.: Aplicaciones de energía cinética en electromovilidad autónoma y sostenible. Revista UIS Ingenierías 19, 167–180 (2020). https://doi.org/10.18273/revuin.v19n4-2020015
De, V., De, R., De, B., Camilo, C., Laverde, M., Alejandro, C., Ardila, S.: Viabilidad de recarga de baterías de vehículos eléctricos mediante energía cinética constante. (2019)
Publica, E.D.S.E., Jefa, C.M.G.G.R.: Cuantificación de la capacidad de regeneración de energía en vehículos sujetos a vibración estocástica (2020). www.cenidet.edu.mx
Hardy, H.S., Straughen, A.R.: Aplicacion del motor de inducción lineal como unidad motriz en un tren subterráneo de diseño convencional. Contribuciones Científicas y Tecnológicas Universidad de Santiago de Chile (2019)
Andres, G.M.F.M.M.T.P., Ángel Guillermo, I.H.O.: Universidad técnica de Cotopaxi “estudio comparativo de las tres topologías clásicas de los inversores multinivel controlados mediante modulación spwm y un motor de inducción tipo jaula de ardilla como carga” (2021)
Luis, J., Hernández, G., Montserrat, C., Cuevas, G., Sepúlveda, N.M., Merced, J., García, L., Ramon, L., Villalba, M.: Control de velocidad de una máquina de inducción con frenado regenerativo (2021)
Boukadida, Y., Marignetti, F., Casolino, G.M., Masmoudi, A., Andreoli, A., Albanesi, M.: Emulation and testing for automotive propulsion drive using two cascaded inverters. IEEE Trans. Ind. Appl. 56(2), 1766–1783 (2020). https://doi.org/10.1109/TIA.2019.2959756
Guo, J., Li, W., Wang, J., Luo, Y., Li, K.: Safe and energy efficient car-following control strategy for intelligent electric vehicles considering regenerative braking. IEEE Trans. Intell. Transp. Syst. 23(7), 7070–7081 (2022). https://doi.org/10.1109/TITS.2021.3066611
Liu, X., Fotouhi, A., Auger, D.J.: Optimal energy management for formula-e cars with regulatory limits and thermal constraints. Appl. Energy 279, 115805 (2020). https://doi.org/10.1016/j.apenergy.2020.115805. https://www.sciencedirect.com/science/article/pii/S0306261920312861
Martellucci, L., Giannini, M.: Regenerative braking experimental tests and results for formula student car. J. Transport. Technol. 11, 78–89 (2021). https://doi.org/10.4236/jtts.2021.111005
Cisneros, V.I.A.G., Maila, J.I.E.G., C.N.S.J. III, C.J.W.A. III. Characterization of the forces of the electric vehicle seen from its dynamics for its optimization (2021). https://doi.org/10.23857/pc.v6i9. http://polodelconocimiento.com/ojs/index.php/es; https://orcid.org/0000-0001-6739-9309
O. RT. System op4510 simulator rapid control prototyping (rcp) and hardware-in-the-loop (hil). URL www.opal-rt. com
Chroma. Two-in-one: Bidirectional dc power supply and load power conversion testing of electric vehicles and microgrid storage
SEMIKRON. Application note frédéric sargos igbt power electronics teaching system principle for sizing power converters (2008)
Puentes, K., Silva, S.: Diseño de un esquema de sincronización e interconexión de dos inversores trifásicos operando como unidades formadoras (2020)
Low-power sar adc design: Overview and survey of stateof-the-art techniques (2022)https://doi.org/10.1109/TCSI.2022.3166792
Shankar, A., Lokeshwari, A., Manohar, B., Pranavi, S.: Implementation of simple pwm/ppm generator for microcontroller using Verilog. Int. J. Adv. Res. Eng. Technol. (IJARET) 12, 97–102 (2021). https://doi.org/10.34218/IJARET.12.3.2021.011. http://www.iaeme.com/IJARET/issues.asp?JType=IJARET&VType=12&IType=3
Hossien, M.E., Zahir, M.Z.I., Karim, S.M.R.: Performance analysis of pam and ppm in communication system. Int. J. Sci. ‘I&’ Eng. Res. 10 (2019). http://www.ijser.org
Hamil, H., Azzazécole, M.S., Sakhéecole, S., Maaliécole, A., Zidelmal, Z., Abdeslam, D.O.: Design and fpga real-time implementation of pwm and ppm modulation for ultra wide band applications (2019)
L.D. Didactic, G. Leyboldstrasse. Instruction sheet 731 989usb
Bosh-tous, A.: Comparación de métodos experimentales para obtener los parámetros eléctricos de un motor de inducción. Artículo Revista de Sistemas Experimentales Septiembre 3, 8–17 (2016). www.ecorfan.org/bolivia
clima.tierra.com. Clima Bogotá 20 abril 2023 (2023). https://clima.terra.com/colombia/bogota/2023/abril/clima-bogota-20-abril-2023.html
Deb, P.B., Sarkar, S.: Dynamic model analysis of three phase induction motor using matlab/simulink. Int. J. Sci. Eng. Res. 7 (2016). http://www.ijser.org
Baek, S., Cho, J., Kim, K., Ahn, S., Myung, C.L., Park, S.: Effect of the metal-foam gasoline particulate filter (gpf) on the vehicle performance in a turbocharged gasoline direct injection vehicle over ftp-75. Int. J. Automot. Technol. 21, 1139–1147 (2020)
Muduli, U.R., Beig, A.R., Jaafari, K.A., Alsawalhi, J.Y., Behera, R.K.: Interrupt-free operation of dual-motor four-wheel drive electric vehicle under inverter failure. IEEE Trans. Transp. Electrific. 7, 329–338 (2021). https://doi.org/10.1109/TTE.2020.2997354
Funding
Open Access funding provided by Colombia Consortium. This work was partially supported by Minciencias with project Programa de Investigación en Tecnologías Emergentes para Microrredes Eléctricas Inteligentes con alta Penetración de Energías renovables, contract 80740-542-2020.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there are no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Velasquez, J.D.O., Moreno, J.A.G. & Aldana, N.L.D. Experimental platform for studying energy regeneration in electric vehicle powertrains. J. Power Electron. (2024). https://doi.org/10.1007/s43236-024-00836-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43236-024-00836-y