
Abstract
Nowadays, finite element tyre models are often used to perform vehicle NVH (noise, vibration, harshness) simulations. To account for the specific operating conditions, a road surface must be properly included in the model. This paper deals with a methodology to experimentally evaluate and process road irregularity measurements, so as to generate a road surface input. These surfaces are used to simulate the tyre/road interaction at the footprint, which is modelled as a contact surface in finite element tyre models. For this reason, a linear profile of the road surface is not suitable for these simulations and the whole surface must be considered. Starting from the measurements taken through a test equipment specifically designed to carry laser sensors and scan road profiles, the Power Spectral Density (PSD) of a specific track is estimated and then interpolated considering piecewise functions. Finally, a model to generate a road surface starting from the measured PSD is developed, discussed and validated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the last decades, the automotive industry invested significant resources in improving vehicle comfort. Nonetheless, vibrations and cabin interior noise are still two of the main sources of passengers’ discomfort [1]. For this reason, NVH (noise, vibration and harshness) analyses are often performed to investigate the dynamics of vehicle components and optimize their performances. Nowadays, car cabin interior noise and vibrations up to 500 Hz are mainly related to tyre dynamics and tyre/road interaction, together with aerodynamic and powertrain contributions [2,3,4,5]. Due to the increased demand for hybrid and electric vehicles, tyre noise is becoming one of the major contributor to the overall interior noise. As a consequence, modelling and simulating these phenomena is a key aspect for the automotive industry.
Due to the continuous progresses in finite element (FE) tyre modelling, simulations represent a valid alternative to costly and time-consuming experimental campaigns and they can provide reliable sensitivity analyses on tyre design parameters. Refined 3D FE tyre models are developed to analyse the tyre structural dynamics [6,7,8] and to enable simulations in frequency ranges of interest for the cabin interior noise investigation. However, proper modelling of the complex tyre structure and of the different material properties is not sufficient to perform NVH simulations, and suitable models of the tyre/road interaction are required too. To obtain reliable results, a fine discretization of the tyre footprint region is fundamental. Moreover, considering that tyre vibration is highly affected by the pavement characteristics, a detailed description of the road irregularity needs to be considered, taking into account that a road surface should be provided with a resolution higher than the characteristic dimension of the finite elements in the tyre footprint region.
Focussing on the description of road surface irregularities, several indicators based on the processing of longitudinal profiles are available [9,10,11,12] and standards devoted to the definition of a uniform method for reporting vertical road profile measurements have been published [13]. Considering vehicle dynamics simulations, the road vertical irregularity is typically described in terms of Power Spectral Density (PSD) functions [14], so that the profile amplitudes are decomposed according to the related spatial frequencies. Another widely used indicator is the International Roughness Index (IRI), a scalar number typically used to quantify the irregularity of highways [10]. Dealing with road profile description, two different approaches can be adopted. The first one relies on experimental measurements, which are typically performed by means of profilometers [15]. The second approach consists in generating profiles starting from models. A comparison between real and generated profiles as well as an analysis on the road profile generation are provided in [16, 17]. Several research activities were performed in terms of longitudinal profiles indicators, generation and measurement, however, no established procedure to generate a realistic surface starting from measurements or indicators is available yet. This paper proposes a methodology to cover this research area, which is particularly useful in the FE tyre simulation context.
Simulations are often performed with the aim of reproducing realistic test conditions. To this end, experimental measurements of specific test track surfaces are required. Nonetheless, considering typical frequency ranges of interest and the refined discretization of the footprint region of the FE tyre model, high-resolution road surface scans of extended lengths are needed. These measurements are difficult and time-consuming to be performed, thus a road surface model must be introduced and tuned based on feasible experimental measurements.
This paper deals with a methodology to experimentally evaluate and post-process road irregularity measurements to obtain inputs suitable for FEM simulations of a rolling tyre. For the sake of brevity, details on FE tyre modelling and tyre/footprint interaction are out of the scopes of this work; however, it is assumed that a refined footprint mesh is defined and that it interacts with the road surface along the vertical direction. Focussing on the description of the road input, the target of this paper is the definition of a methodology for road surfaces generation starting from simple measurements performed by means of lasers and a dedicated linear rail system. The PSD of a specific track is evaluated and interpolated considering a piecewise function formulation. Eventually, assuming that the PSD is the same along forward and lateral directions, a model for road surface generation is introduced and validated. This strategy enables the generation of a road surface starting from typical procedures for PSD evaluation, avoiding non-conventional, high-resolution and extended road surface measurements.
The paper is organised as follows. In Sect. 2, the designed measurement system is presented together with the description of the experimental campaign and data processing carried out to characterize the considered track in terms of PSD. In Sect. 3 the modelling strategy adopted to compute a 3D surface model of the road track is presented and validated against a reference measuring system. Section 4 draws the conclusions.
2 Experimental Measurements and PSD Estimation
In the 0–500 Hz frequency range, structure-borne car cabin interior noise and vibrations are mainly related to tyre dynamics and tyre/road interaction [5]. As a consequence, frequency-domain NVH simulations based on FE tyre models are typically performed up to 500 Hz. The frequency resolution and the tyre speed are other important simulation parameters. In this work, the target is the evaluation of a road surface for simulations with a frequency resolution of 1 Hz and a vehicle speed up to 90 km/h. According to these parameters, a road input of 25 m length should be considered to include wavelengths up to the maximum one. As regards the lateral direction, the road input width should be greater than or equal to the footprint lateral dimension and a spatial resolution similar to the footprint mesh should be considered. Typically, footprint meshes with nodes distances ranging from 1 to 3 mm are used, thus a road input discretization of 1 mm is adopted.
Taking into account the above requirements, these extended measurements are not feasible with conventional devices. For this reason, an experimental campaign has been carried out to measure road profiles to be later processed to realize a road surface suitable for simulations. To this aim, a dedicated measuring system has been designed (refer to Sect. 2.1) to perform acquisitions of a reduced set of the track (as described in Sect. 2.2). The results of the measuring campaign are used for the estimation of the PSD of the considered test track (Sect. 2.3). Eventually, these data are adopted as the input for the generation of a road surface according to the methodology reported in Sect. 3.
2.1 Road Scanner Design
To comply with the test requirements, the measuring system shown in Fig. 1a has been designed. As a compromise between lightweight, stiffness and ease of assembly, four Bosch Rexroth aluminium beams have been adopted to realize the supporting frame (length of 4 m, width of 0.6 m), which is meant to lie on the surface to be scanned. On top of it, a moving frame composed of similar aluminium beams carries the measuring system. 3D printed elements realize the coupling between the fixed and moving frames. They match the Bosch profiles and are screwed to the moving frame (two on each runner) to provide the correct alignment while operating. This aspect is fundamental for a smooth movement of the frame, as well as the orthogonality of the elements of the fixed frame, which was verified during the assembly. Note that the prototype of the measuring system relies on manual handling to make the frame move along the fixed one. The possibility to make the measuring system automatic by an electric drive could be considered for future applications.

Measurement system designed to scan road roughness profiles. a A schematic representation of the system, that carries a position sensor (x coordinate) and two laser sensors for road scan (z1 and z2). b Detail of the synchronous data acquisition, that allows associating the z vertical track profiles to the x spatial coordinate at any time t
Two type of sensors are installed on the moving frame. On the one hand, a Leuze Electronic optical distance sensor of the ODSL 30/24-30M-S12 type measures the longitudinal position while proceeding along the test track (x coordinate in Fig. 1a). The sensor has a measuring range up to 30 m and requires a reference position, represented as a squared blue obstacle in Fig. 1a. In the considered application, a forward x coordinate ranging from 0 to 3.5 m can be covered (note that the measuring distance is slightly smaller than the aluminium beam due to the size of the moving frame). On the other hand, laser triangulation sensors of the MEL Microelectronics M5L/20 type are installed to scan the road profile (along the z direction). The sensors have a measuring range of 20 mm with a focus distance of 50 mm. In the considered application, two sensors have been installed in parallel, providing two scans of the considered test track for each step of the measuring campaign. All sensors are provided with their power supply and are connected through BNC cables to a NI 9239 voltage input module. Data are synchronously acquired through a NI cDAQ9178 data logger, at a sampling rate of 2000 Hz. Finally, a laptop completes the measurement chain.
According to this setup, synchronized measurements of the x and z coordinates of a 3.5 m portion of the considered track can be performed (a schematic view of the measuring procedure is also shown in Fig. 1b). Moreover, combining the x and z measurements, a post-processing algorithm enables the evaluation of the road irregularity along equally spaced intervals in the x direction (longitudinal).
2.2 Experimental Campaign
The track condition may differ along its whole length due to several reasons, such as wear and environmental phenomena. Thus, to account for the possible variability of the asphalt surface, a series of acquisition has been realized. Specifically, four different positions have been selected out of the whole track, at approximately 60 m one apart the other. Moreover, for each of them, 10 positionings along the width of the track have been considered. In the end, 20 scans per position have been performed, for a total of 80 scans to gain statistical relevance in the description of the considered test track.
In Fig. 2, the experimental setup adopted during the outdoor experimental campaign is presented. The fixed frame is positioned along the vehicle travelling direction, aligned towards the left side of the track and progressively re-positioned rightwards to complete the 10 repetitions. To provide power supply and to carry the acquisition and conditioning systems, a cart has been adopted. The laser triangulation sensors require appropriate conditions in terms of surface optical reflections, thus a lens protective device was also installed.

Experimental campaign for track road surface measurements. The designed scanner is placed on the track, laser sensors are manually operated, the blue cart carries the conditioning system and power supply
2.3 Road Irregularity PSD
Once the measurements have been performed, the whole dataset composed of 80 scans has been processed so as to compute the average PSD function describing the considered track. The experimental results are shown as a blue line in Fig. 3b. For completeness, a picture of the considered test track is provided in Fig. 3a, where a 2 Euros coin is also placed to provide a hint of the average size of the asperities characterizing the considered asphalt.

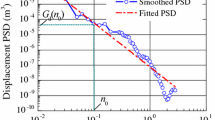
Results of the experimental campaign. a Picture of the test track with a 2 Euros coin placed as a reference size. b PSD of the considered test track as a function of the spatial frequency n: the measured and interpolated PSD functions are reported in blue and red respectively. Dashed lines identify the spatial frequency range of interest for NVH simulation
The results are presented as a function of the spatial frequency n (defined as the reciprocal of the wavelength \(\lambda\)). Along the x-axis the results are shown along the \(0.3 {m}^{-1}\) and \({10}^{3}{ m}^{-1}\) range, that is consistent with the characteristics of the measuring system. Specifically, these bounds are respectively associated to the longest wavelength of 3.5 m (equal to the scanned portion of the track) and spatial sampling of the road profile (1 mm). A distinction can be made considering long wavelengths and shorter ones, with a drastic change in the slope of the experimental data registered above the threshold value of \(n=40 {m}^{-1}\), corresponding to \(\lambda = 0.025\mathrm{ m}\). This experimental evidence is aligned with previous research activities [18] and can thus be deemed as characteristic of the considered test track. It should be reminded that the region of interest for NVH simulation is well below the change of slope of the diagram, as highlighted by dashed vertical lines which correspond to the 1–500 Hz frequency range for a vehicle travelling at a speed of 90 km/h.
As a first step of the post-processing stage, the experimental data have been fitted by a piecewise linear function, which is reported in red in Fig. 3b. This way, an analytical formulation of the PSD function describing the road irregularity of the considered test track can be computed. The benefit of the proposed solution consists in the possibility to choose the desired frequency resolution, which is a strategy typically adopted dealing with PSD functions. In addition, it enables the evaluation of the function also at lower frequencies, reaching the desired value of 1 Hz (corresponding to \(n=0.04 {m}^{-1}\) in Fig. 3b). In the next section, the methodology designed to generate a road surface is presented.
3 Generation of Road Surfaces from a Road Irregularity PSD
In this section, a frequency-domain model of the road surface in contact with one or more moving footprints is defined. Then, the experimental measurements described in the previous section are considered to tune the model parameters to generate road surfaces that are specific of the tracks under analysis. Eventually, the results and the validation of the methodology are reported to complete the discussion, considering also data of a different track with smoother irregularities.
3.1 Proposed Model
According to the discussion presented in Sects. 1 and 2, tyre models for NVH simulations require a road surface description, so that vertical displacement \({{\varvec{z}}}_{{\varvec{r}}{\varvec{o}}{\varvec{a}}{\varvec{d}}}\left({\varvec{x}},{\varvec{y}}\right)\) is evaluated at a given set of longitudinal and lateral coordinates \(\left({{\varvec{x}}}_{{\varvec{r}}},{{\varvec{y}}}_{{\varvec{r}}}\right)\) that refer to a reference frame fixed to the ground. The trend of the road surface along the lateral and longitudinal directions can be analytically expressed as a 2D Fourier series, considering a related wave amplitude \({{\varvec{A}}}_{{\varvec{i}}{\varvec{j}}}\) and a phase \({{\varvec{\phi}}}_{{\varvec{i}}{\varvec{j}}}\) for each longitudinal-lateral spatial frequency pair (\({{\varvec{n}}}_{{\varvec{i}}},{{\varvec{m}}}_{{\varvec{j}}})\). The latter is randomised under the assumptions that the road irregularity is a stationary random process, whereas the amplitude \({{\varvec{A}}}_{{\varvec{i}}{\varvec{j}}}\) is related to the characteristics of the specific pavement under analysis. Thus, the expression of \({{\varvec{z}}}_{{\varvec{r}}{\varvec{o}}{\varvec{a}}{\varvec{d}}}\left({\varvec{x}},{\varvec{y}}\right)\) can be written as:
Equation (1) shows no time-dependancy since the road is fixed in time. However, the tyre-road interaction is a strictly time-dependent phenomenon due to the motion of the vehicle along the road. For this reason, to perform tyre simulations it is of interest to evaluate the vertical displacement that the moving footprint undergoes at each time instant \({\varvec{t}}\). Thus, a description of the footprint vertical displacement is required and footprint nodes coordinates \({{\varvec{x}}}_{{\varvec{f}}}\) and \({{\varvec{y}}}_{{\varvec{f}}}\) (defined according to a moving reference frame fixed with the footprint) must be considered as shown in Fig. 4.

Footprint nodes of a FE tyre model running on a road profile at a constant speed \(v\). The footprint local reference frame is represented in red, whereas the road absolute reference frame is represented in black
The relationship between the road surface \({{\varvec{z}}}_{{\varvec{r}}{\varvec{o}}{\varvec{a}}{\varvec{d}}}\left({{\varvec{x}}}_{{\varvec{r}}},{{\varvec{y}}}_{{\varvec{r}}}\right)\) and the footprint vertical displacement \({{\varvec{z}}}_{{\varvec{f}}{\varvec{o}}{\varvec{o}}{\varvec{t}}{\varvec{p}}{\varvec{r}}{\varvec{i}}{\varvec{n}}{\varvec{t}}}\left({{\varvec{x}}}_{{\varvec{f}}},{{\varvec{y}}}_{{\varvec{f}}},{\varvec{t}}\right)\) can be derived combining the motion law of the vehicle and the tyre/road interaction model. Assuming the vehicle to travel at constant speed, the coordinates of the footprint nodes can be expressed according to the road reference frame as:
As regards tyre/road contact model, different solutions can be adopted depending on the required degree of accuracy [19,20,21]. In this paper, a simple interaction is introduced by requiring the displacement of the footprint region to coincide with the road surface. For this reason, once both road surface and footprint vertical displacement are evaluated according to the vehicle reference frame, the following expression holds:
that can also be written as:
Equation (4) allows for a better discussion of the terms of the expression. Considering the same lateral coordinate \({{\varvec{y}}}_{{\varvec{f}}}\), a node in the footprint outlet region undergoes the same vertical displacement of a node of the inlet region, with a delay that is proportional to the distance between the two nodes \({\varvec{\Delta}}{\varvec{t}}={\varvec{\Delta}}{{\varvec{x}}}_{{\varvec{f}}}/{\varvec{v}}\). Moreover, the terms that multiply the time-dependent component of the expression can be interpreted as circular frequencies:
Reminding that the goal of the proposed methodology is the definition of a road roughness model to perform frequency-domain simulations, Eq. (4) can be written including Eq. (5) and making use of the Euler formula:
From Eq. (6) it is possible to isolate the frequency-domain expression of the footprint vertical displacements \({{\varvec{Z}}}_{{\varvec{f}}{\varvec{o}}{\varvec{o}}{\varvec{t}}{\varvec{p}}{\varvec{r}}{\varvec{i}}{\varvec{n}}{\varvec{t}}}\left({{\varvec{x}}}_{{\varvec{f}}},{{\varvec{y}}}_{{\varvec{f}}},{{\varvec{\omega}}}_{{\varvec{i}}}\right)\) at a given circular frequency \({{\varvec{\omega}}}_{{\varvec{i}}}\):
In this case, \({{\varvec{Z}}}_{{\varvec{f}}{\varvec{o}}{\varvec{o}}{\varvec{t}}{\varvec{p}}{\varvec{r}}{\varvec{i}}{\varvec{n}}{\varvec{t}}}\left({{\varvec{x}}}_{{\varvec{f}}},{{\varvec{y}}}_{{\varvec{f}}},{{\varvec{\omega}}}_{{\varvec{i}}}\right)\) is a complex-valued function and the time delay related to the longitudinal position \({{\varvec{x}}}_{{\varvec{f}}}\) is included as a phase shift \({{\varvec{e}}}^{{\varvec{j}}{{\varvec{\omega}}}_{{\varvec{i}}}\frac{{{\varvec{x}}}_{{\varvec{f}}}}{{\varvec{v}}}}\). The latter is typically included in traditional vehicle simulations to model the relationship between front and rear axles. In the current work, the formula leads to the same conclusion to account for the time delay between nodes belonging to the same footprint.
Reformulating the expression introduced in Eq. (7), the footprint vertical displacement can be expressed as a complex number with amplitude \({{\varvec{Z}}}_{{\varvec{i}}}\) and a phase \({\boldsymbol{\varphi }}_{{\varvec{i}}}\) (to be shifted according to the exponential \({{\varvec{e}}}^{{\varvec{j}}{{\varvec{\omega}}}_{{\varvec{i}}}\frac{{{\varvec{x}}}_{{\varvec{f}}}}{{\varvec{v}}}}\)):
The goal of the current work is to obtain an expression of \({{\varvec{Z}}}_{{\varvec{i}}}\) and a phase \({\boldsymbol{\varphi }}_{{\varvec{i}}}\) carrying out simple PSD measurements (see Sect. 2), without performing a complete road surface scan. As regards the amplitude \({{\varvec{Z}}}_{{\varvec{i}}}\), this can be directly estimated from the results of the experimental campaign. Considering the relationship between a single-sided PSD \({{\varvec{G}}}_{{\varvec{d}}}\left({\varvec{n}}\right)\) and the spectra amplitude \({{\varvec{Z}}}_{{\varvec{i}}}\), the following equation holds:
Concerning the phase \({\boldsymbol{\varphi }}_{{\varvec{i}}}\), it can be estimated comparing Eq. (7) and Eq. (8) and assuming that the measured PSD is representative of both the longitudinal and the lateral directions:
According to Eq. (10), the phase of the footprint vertical displacement can be defined as the phase of an equivalent complex number. Its value is the result of a weighted sum, whose weights are related to the irregularity PSD. Moreover, each spatial frequency is associated with a random phase \({\phi }_{ij}\) and a phase shift \(\Delta \phi =2\pi {m}_{j}{y}_{f}\) coming from the lateral coordinate \({y}_{f}\) of the footprint node and the lateral spatial frequency \({m}_{j}\).
In the end, the proposed formulation enables the possibility of generating a road surface from PSD measurements through a frequency-domain approach, including proper relationships along the lateral and longitudinal directions, suitable to perform tyre dynamics simulations with detailed FE models.
3.2 Results and Model Validation Against Experimental Measurements
Based on the formulation described in Sect. 3.1, the footprint vertical displacement is evaluated in the frequency domain. This data can be directly used as an input for NVH tyre simulations. However, to visualize the spatial trend of the generated road surfaces, Sect. 3.1 equations can be also used to evaluate \({{\varvec{z}}}_{{\varvec{r}}{\varvec{o}}{\varvec{a}}{\varvec{d}}}\left({{\varvec{x}}}_{{\varvec{r}}},{{\varvec{y}}}_{{\varvec{r}}}\right)\) in the space domain. In this section, this approach is adopted to validate the methodology against data of two different asphalts. Geometrical-based check are perfomed on the two generated surfaces to obtain a validation that is independent on tyre models, simulation procedures and parameters.
Figure 5a, c show 1 m × 1 m portions of the generated road surfaces, evaluated from the coarse PSD measured in Sect. 2 and a smooth one, respectively. A random trend can be observed both in the lateral and the longitudinal directions. Focussing the attention on the detailed zooms shown in Fig. 5b, d a continuous trend is observed along the longitudinal and lateral directions. No discontinuities can be generated since the profile is modelled as the superposition of continuous harmonic functions (refer to Eq. 1). The two-dimensional formulation of the proposed model represents a difference with respect to alternative modelling approaches based on parallel track models and lateral coherence functions (details on parallel track models for vehicle simulations are discussed in [22]). Moreover, results show that providing PSDs referring to tracks with different irregularities, the generated surfaces are consistent with the provided inputs.

The road surface generated from PSD measurements. In (a), the 1 m × 1 m road surface referring to the coarse asphalt. In (b), a detailed view of the 0.02 m × 0.02 m bottom-left corner of (a). (c) and (d) refer to the smooth asphalt. No local discontinuities are observable in longitudinal and lateral direction
A preliminary validation of the road surface generation is based on the comparison of the peak-to-peak vertical displacements \({\varvec{\Delta}}\mathbf{z}={\mathbf{z}}_{\mathbf{m}\mathbf{a}\mathbf{x}}-{{\varvec{z}}}_{{\varvec{m}}{\varvec{i}}{\varvec{n}}}\). The results of the comparison are reported in Table 1. A good match between the artificial profiles and the whole set of experimental measurements is obtained, thus no significant global overestimation or underestimation of the surface irregularity is introduced with the proposed formulation.
A second and more refined analysis has been performed to validate the whole methodology, both in terms of measurements and signal processing. At first, the measured PSDs (Fig. 6, red curves) are compared with the PSDs of the generated surfaces (Fig. 6, purple curves), obtaining an exact match, thus validating the model proposed in Sect. 3.1. It is worth mentioning that the trend of the measured PSD of the smooth surface (Fig. 6b, red curves) has been verified to be characteristic of this track and, despite having a different trend with respect to the PSD of the coarse surface, it is representative of this asphalt. Secondly, a high-resolution reference profilometer capable of measuring small rectangular portions of road surface was used during the experimental tests described in Sect. 2 alongside the measuring device proposed in this paper. Technical details on this reference profilometer are omitted, however, it is worth mentioning that this device is particularly suited to measure very short wavelengths by means of acquisitions of small portions of the road surface (a spatial resolution much lower than 1 mm can be reached). This profilometer cannot be directly used for the evaluation of all wavelengths of interest for tyre simulations up to 500 Hz, nonetheless its measurements are useful to perform a validation in the range of wavelengths in common with the device described in Sect. 2. Through these measurements, it was possible to evaluate the PSDs of the track irregularity and compare it with the PSD estimated with the device described in Sect. 2 and the generated road surface one. The results are represented in Fig. 6. Fluctuations can be observed on the reference profilometer curve. In this case, the measurements were not interpolated through piecewise functions, thus the results show the typical variability related to the peculiarities of the scanned track portions. Despite this, the comparison shows that the PSDs are in accordance, thus validating both the measurements performed with the device introduced in Sect. 2 and the data processing strategy described in Sect. 3 considering two road surfaces with different characteristics.

Validation of the generated road surface PSD. Same trend of the original PSD provided for the surface generation is obtained. Moreover, measurements of a reference profilometer are used to validate both the original measurements with the device described in Sect. 2 and the road surface generation
Eventually, a further check has been performed to assess the characteristics of the generated road surfaces in terms of wave amplitudes along the longitudinal and lateral directions. To this aim, the generated road surfaces represented in Fig. 5a, c were processed to obtain the 2D Fourier series expression described by Eq. 1. In Fig. 7, the trend of the \({A}_{ij}\) Fourier coefficients at the change of the longitudinal and lateral spatial frequencies is represented. It can be observed that the amplitudes of the road surface (represented in logarithmic scale) are similar along the lateral and longitudinal directions, in accordance with the assumption applied to derive Eq. 10.

4 Conclusions
In this paper, a methodology to generate a road surface starting from experimental data has been proposed. To this end, a measuring system has been specifically designed, consisting of a fixed frame that carries a moving frame with laser sensors, manually operated to scan road profiles. As a future application, the possibility to instal an electric drive can be considered. The data processing consists of two steps: at first, the PSD of the experimental road profiles has been computed, considering different measuring positions along the track to gather statistical relevance. Secondly, a modelling strategy based on a 2D Fourier series decomposition has been proposed. Attention has been devoted to design a suitable strategy to guarantee the proper continuity of the resulting road surface, considering the relative phase of contiguous surface layers. A three step validation has been performed considering a rough and a smooth profiles. First, the peak-to-peak amplitude has been considered, showing satisfactory agreement against direct measurements. Secondly, the road surface generation and the PSD measurements have been validated against experimental data coming from a reference profilometer. Finally, the wave amplitudes of the generated road surface were investigated to check the consistency with the model assumption, obtaining satisfactory results. These analyses validated the PSD measurements taken with the measuring system described in Sect. 2 and the data processing strategy described in Sect. 3.
In the end, a methodology to generate a road surface has been defined, based on a simple measuring setup and a suitable data processing. The proposed strategy could be adopted to carry out NVH tyre simulations based on refined FE tyre models with footprint regions modelled as surfaces in contact with the road. Tyre simulations can also benefit of further studies on tyre/road interaction mechanisms and the investigation of the effect of environmental conditions on tyre rolling.
Data availability
The data that has been used is confidential.
References
Silva, M. C. G. D. (2002). Measurements of comfort in vehicles. Measurement Science and Technology. https://doi.org/10.1088/0957-0233/13/6/201
Lalor, N., & Priebsch, H. (2007). The prediction of low and mid-frequency internal road vehicle noise: a literature survey. Proceedings of the Institution of Mechanical Engineers, Part D Journal of Automobile Engineering,. https://doi.org/10.1243/09544070JAUTO199
Thompson, D. J. (2004). Vehicle noise. Advanced applications in acoustics, noise and vibration (pp. 236–291). CRC Press.
Wang, X. (2010). Vehicle noise and vibration refinement. Elsevier.
De Klerk, D., & Ossipov, A. (2010). Operational transfer path analysis: Theory, guidelines and tire noise application. Mechanical Systems and Signal Processing, 24, 1950–1962.
G. Yanjin, Z. Guoqun, C. Gang, «3-Dimensional non-linear FEM modeling and analysis of steady-rolling of radial tires,» Journal of Reinforced Plastics and Composites, vol. 30, n. 3, pp. 229–240, 2010.
Meschke, G., Payer, H. J., & Mang, H. A. (1997). 3D simulations of automobile tires: Material modeling, mesh generation, and solution strategies. Tire Science and Technology, 25(3), 154–176.
Behnke, R., & Kaliske, M. (2015). Thermo-mechanically coupled investigation of steady state rolling tires by numerical simulation and experiment. International Journal of Non-Linear Mechanics, 68, 101–131.
Kropáč, O., & Múčka, P. (2007). Indicators of longitudinal road unevenness and their mutual relationships. Road Materials and Pavement Design, 8(3), 523–549.
Šroubek, F., Šorel, M., & Žák, J. (2021). Precise international roughness index calculation. International Journal of Pavement Research and Technology. https://doi.org/10.1007/s42947-021-00097-z
Alatoom, Y. I., & Obaidat, T. I. (2022). Measurement of street pavement roughness in urban areas using smartphone. International Journal of Pavement Research and Technology, 15, 1003–1020.
P. Múčka, «International Roughness Index specifications around the world,» Road Materials and Pavement Design, vol. 18, n. 4, pp. 929–965, 2017.
ISO. ISO 8608:2016 - Mechanical vibration - Road surface profiles - Reporting of measured data.
Andrén, P. (2006). Power spectral density approximations of longitudinal road profiles. International Journal of Vehicle Design. https://doi.org/10.1504/IJVD.2006.008450
Sayers, M. W. (1996). The Little Book of Profiling: Basic Information about Measuring and Interpreting Road Profiles, University of Michigan. Transportation Research Institute: UMTRI.
Loprencipe, G., & Zoccali, P. (2017). Use of generated artificial road profiles in road roughness evaluation. Journal of Modern Transportation, 25, 24–33.
Lenkutis, T., Čerškus, A., Šešok, N., Dzedzickis, A., & Bučinskas, V. (2021). Road Surface profile synthesis: Assessment of suitability for simulation. Symmetry, 13(1), 68.
Cigada, A., Mancosu, F., Manzoni, S., & Zappa, E. (2010). Laser-triangulation device for in-line measurement of road texture at medium and high speed. Mechanical Systems and Signal Processing, 24(7), 2225–2234.
Wollny, I., Behnke, R., Villaret, K., & Kaliske, M. (2016). Numerical modelling of tyre–pavement interaction phenomena: coupled structural investigations. Road Materials and Pavement Design, 17(3), 563–578.
Andersson, P., & Kropp, W. (2008). Time domain contact model for tyre/road interaction including nonlinear contact stiffness due to small-scale roughness. Journal of Sound and Vibration, 318, 296–312.
Vu, T. D., Hai-Ping, Y., Duhamel, D., Gaudin, A., & Abbadi, Z. (2014). Tire/road contact modeling for the in-vehicle noise prediction. Internoise 2014. Melbourne.
Múčka, P. (2015). Model of coherence function of road unevenness in parallel tracks for vehicle simulation. International Journal of Vehicle Design, 67(1), 77.
Acknowledgements
This study is part of the Joint Labs Structure Borne Tyre Noise (SBN) research project between Politecnico di Milano and Pirelli. The authors gratefully acknowledge Pirelli for providing the support and data necessary to this work.
Funding
Open access funding provided by Politecnico di Milano within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rapino, L., La Paglia, I., Ripamonti, F. et al. Measurement and Processing of Road Irregularity for Surface Generation and Tyre Dynamics Simulation in NVH Context. Int. J. Pavement Res. Technol. 17, 918–928 (2024). https://doi.org/10.1007/s42947-023-00277-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42947-023-00277-z