
Abstract
Purpose
Determining the safety conditions of a hot pepper harvester to mechanize harvesting.
Methods
The dynamic characteristics of a hot pepper harvester were analyzed with the dynamic simulation program RecurDyn.
Results
The pepper harvester can climb a maximal slope of 25° under full loading conditions; the maximal allowable height of an obstacle over which the harvester can drive is 450 mm; the minimal rotation radius during a spin turn is 870 mm.
Conclusions
Considering its dynamic characteristics, the harvester can be applied on over 95% of domestic upland fields. The safety accident rate can be decreased with the use of the spin turn method. In conclusion, the dynamic characteristics are sufficiently safe for the domestic upland fields.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Hot pepper is one of the representative vegetables on the Republic of Korea; it is used in its fresh, dry, or powdered form and accounts for 41.7% of used condiment vegetables according to a food statistics survey (MAFRA 2017). Despite the high demand on the condiment vegetable market, the cultivation area of hot pepper decreased from 50,000 ha in 2008 to under 30,000 ha in 2018 (KOSIS 2018). Consequently, the productivity decreased significantly, and hot pepper was imported to satisfy the market demands. The import volume increased to approximately 110,000 tons in 2011, which exceeded the domestic supply; the import volume is still increasing annually (KREI 2017).
The most significant reasons for decreasing the cultivation area are the long harvesting time and low mechanization (although the harvest requires high labor intensity). While the mechanization rates of the plowing and rotary work and pest control work were 99.8% and 82.8%, respectively, harvest work did not score a sufficiently high rate to be included in the statistics of mechanization rates (KOSIS 2017). The total labor time per hectare in hot pepper cultivation is 2436 h, and the harvest work accounts for 39.2% (954 h) of complete duration (RDA 2006). Owing to 2.0–5.4 relative metabolic rate, harvest work is classified as high-intensity labor. Therefore, many researchers have studied the mechanization of harvest work.
In 1995, Lee et al. conducted a survey on farmers to develop a hot pepper harvesting machine. Many farmers required a separate harvesting machine rather than an attachment type, and the most frequently mentioned problem for the commercialization of the machine was the slope of land (Lee et al. 1995). According to a survey, 39.4% of the 33 largest domestic hot pepper farms have flat fields, while 60.6% have fields with certain slopes (Choi et al. 2010). Therefore, harvesting machines must be safely operable on fields with slopes.
The previous studies have considered the driving safety of harvesting machine for safe harvest work. However, the use of agricultural machines can result in many types of accidents. According to the National Institute of Agricultural Sciences Survey (2016), 50.5% of accidents occur during the transport, and 24.2% are caused by contact, collision, and strike. In additions, steep slopes, sharp curves, obstacles, and narrow working spaces are significant environmental factors. According to an agricultural machine hazard analysis, there were 519 agriculture machinery accidents and 65 causalities in 2017 (KCA 2017). Moreover, a correlation between agricultural machinery traffic accidents and aging in rural society has been proved through mathematical modeling (Kwon et al. 2016). More than 70 accidents occurred during work, and more than 160 traffic accidents were caused with cultivators and tractors. The types of accidents included rolling up, crashes, falls, hits, crushing, and rolling over. Considering the environmental factors and to prevent agricultural machinery accidents, hot pepper harvesting machine should be safely operable under a variety of conditions.
In this study, the dynamic characteristics of a hot pepper harvester were simulated to evaluate its driving safety. The workable maximal slope at individual work speed, tilting and pitching analysis, obstacle collision analysis, and minimal rotation radius were analyzed. The investigated hot pepper harvester consisted of the driving part (multipurpose driving platform) and the harvesting part.
Materials and Methods
3D Modeling of Hot Pepper Harvester
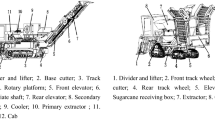
The 3D modeling program NX.UG (ver 11, Siemens, Germany) and dynamic simulation program RecurDyn (V8R5, FunctionBay, Republic of Korea) were used for the dynamic simulation. The harvesting part was sketched with NX.UG 11, and the multipurpose driving platform was sketched with a caterpillar function in RecurDyn V8R5. The specifications of the hot pepper harvester are listed in Table 1, and the vehicle is presented in Fig. 1.

Hot pepper harvester
The harvester was designed with caterpillar tracks; the left and right tracks were individually controllable. Kim and Park (2015) analyzed the dynamic properties of a semi-crawler type mini-forwarder with a simplified model, which can be applied to computational simulations. In the simulation method in this study, the harvester was also simplified to reduce the computations and facilitate the simulations. All simulations were conducted with a driver and in empty and fully loaded states.
Workable Maximal Slope at Individual Work Speed
Because upland fields can exhibit many different slopes, the maximal allowable slope angle for the hot pepper harvester was determined. As shown in Fig. 2, slopes were applied to the simulated ground, and the simulation was conducted at working speeds of 4 and 8 km/h in the empty and fully loaded states. The plain-slope ground was built with RecurDyn. Because actual field exhibit unpaved roads, friction coefficient 0.5 was applied to each surface pavement based on the study of Lim and Choi (2010) (Table 2).

Climbing angle analysis
Table 3 presents the results of a survey on distribution areas based on the slopes of domestic upland fields (RDA 2011). To evaluate the workability of the hot pepper harvester on domestic upland fields, the simulation and survey results were compared.
Tilting and Pitching Analyze
Fig. 3 represents the tilting (longitudinal direction) and pitching (lateral direction) analysis of the hot pepper harvester. A slope was added when the ground was turned over; the maximal allowable angle at a specific point was determined exactly before the tracks of the hot pepper harvester lost contact to the ground. Because the driver’s seat was on the right side and the loading bay was at the rear, the hot pepper harvester had different weight distributions at the front, rear, right, and left. Thus, separate analyses were conducted.

a Tilting analysis, b Pitching analysis
Fig. 4 represents the free body force diagram acting on a vehicle when the ground is turning over. The maximal roll angle can be described by the ratio of the moments arising from lateral and gravitational forces. The gravitational force always acts downward to hold the vehicle against the ground and can be the weight of the vehicle in this case. And the maximal roll angle can be expressed as W (the vehicle weight (N)), h (the height of the center of gravity (mm)), θ (the roll angle (degree)), L (the width of vehicle (mm)), FLateral (the lateral force (N)) and NF (the normal reaction force (N)).

Free body force diagram
As the roll angle is increasing, the resisting moment produced by the gravitational force decreases because of the movement of the mass toward the wheel. When gravitational force is hard to hold the vehicle attachment to the ground, the wheel starts to tip and begin to roll. The roll angle is proportional to the width of the vehicle and inversely proportional to the height of center of gravity.
Obstacle Collision Analysis
Fig. 5 shows the results of the obstacle collision analysis, conducted with RecurDyn V8R5. The hot pepper harvester was driven on flatland and rough and steep paths. Therefore, an obstacle collision analysis of the driving stability was conducted. The hot pepper harvester drove with one side track over differently sized obstacles on the ground. The size of the obstacle was defined as the height from the ground to the top of the obstacle. Subsequently, the maximal allowable size of the obstacle over which the hot pepper harvester could drive, and the roll angle for each obstacle size was determined.

Obstacle collision analysis
Minimal Rotation Radius Determined with Different Rotation Methods
The hot pepper harvester could control its right and left caterpillar tracks individually. Three rotation methods (soft turn, spin turn, and brake turn) were applied to reduce the risk of collision and to determine the minimal allowable rotation radius at which the crops were not damaged during the field work (Fig. 6).

Rotation methods (a Soft turn, b Spin turn, c Brake turn)
A soft turn is defined based on the speed difference between the right and left tracks; a spin turn is defined based on the different rotation directions of the right and left tracks; and in a brake turn, one side track keeps running while the other side track brakes. The minimal rotation radius was analyzed by dividing the work speed into first and second stages.
Results and Discussion
Analysis Results of Workable Maximal Slope
Fig. 7 present the simulation results of the maximal workable slope angle of the hot pepper harvester with a driver for different work speeds and loading states. In the empty state, the maximal slope angle was 35° at all work speeds, and the hot pepper harvester could not climb a slope of over 35°. In fully loaded state, the maximal slope angle was 25° at all work speeds.

The maximal slope analysis results. a Empty state. b Full loading state
According to Table 3, around 95% of domestic upland fields have slope angles of less than 13.5°, and 99% have slope angles of less than 27°. Therefore, the hot pepper harvester can be applied to 95% of domestic upland fields in the fully loaded state (200 kg).
Results of Tilting and Pitching Analyses
The results of the tilting analysis in the empty and fully loaded states are shown in Fig. 8. The maximal angle was reached shortly before the sharp differential slope of the curve. Regarding the tilting analysis results, the tracks lost contact to the ground when the slope reached 53° on the right side and 57° on the left side in the empty loading state. In the fully loaded state, the tracks lost to the ground when the slope reached 52° on the right side and 55 ° on the left side. Owing to the driver’s seat, the right and left sides had different weight distributions. Positioning the driver’s seat on the left side caused the center of gravity to lean to one side. Apparently, the left side of the hot pepper harvester had an advantage of 3° to 4° over the right side.

Tilting analysis results
The results of the pitching analysis for the empty and fully loaded states are presented in Fig. 9. In the empty state, roll-over occurred when the slope reached 58° on a downhill path and 60 ° on an uphill path. In the fully loaded state, roll-over occurred when the slope reached 60 ° on a downhill path and 52° on an uphill path. Because the hot pepper harvester kept front and rear center of gravity balanced, there were no great differences between the downhill and uphill case results in the empty state. However, when 200 kg crops were loaded on the loading bay, the center of gravity moved to the rear position. This triggered the roll-over 8° earlier than the empty state on an uphill path (Table 4).

Pitching analysis for empty state
Results of Obstacle Collision Analysis
The simulations were conducted until the hot pepper harvester experienced roll-over and could not go forward. Tables 5 and 6 present the maximal roll angles of the unloaded and fully loaded hot pepper harvester for each obstacle height respectively.
According to Tables 5 and 6, the roll-over occurred when the obstacle was 500 mm high. It seems that when the machine drove the obstacle height of 500 mm, the roll center (RC) of the machine gets higher than the center of gravity (CG) of the machine. It caused the weight transferred above the ground and roll-over occurred. Therefore, the hot pepper harvester could drive the obstacle height of below 500 mm. Moreover, the roll angles at each obstacle height were constant in the empty and fully loaded states.
Analysis Results of Minimal Rotation Radius
Fig. 10 present the simulation results of the minimal allowable rotation radius in different rotation methods. It was determined by calculating the distances between the start and end points of the outer track of the hot pepper harvester, in the empty and fully loaded states. The results of each rotation method are shown in Table 7.

Calculation of minimal rotation radius
For the soft turn, the hot pepper harvester had a 2000-mm rotation radius for the first gear shift and 3000 mm for the second gear shift. The results of both loading bay conditions were equal. For the spin turn, the rotation radius was 900 mm with empty loading bay and 870 mm when the loading bay was fully loaded with crops. For the brake turn, the rotation radius was 600 mm for both loading conditions. The results and gear shift were not correlated during the spin and brake turns, whereas they were correlated during the soft turn.
Conclusions
In this study, the dynamic characteristics of hot pepper harvester were analyzed. According to the results of the dynamic simulations, the maximal safe path slope for the harvester without crops on the loading bay was 35°; the maximal slope was 25° when the loading bay was fully loaded with crops. Considering the slope distribution of domestic upland fields in the Republic of Korea, the fully loaded hot pepper harvester can be driven on 95% of domestic upland fields.
The loading conditions did not have a great effect on the tilting results. The maximal angle was 53° for the right side and 57° for the left side in the empty loading state and 52° for the right side and 55° for the left side in the fully loaded state. The position of the driver’s seat introduced a small difference between the maximal angles of the right and left sides. By contrast, the loading condition did not affect the tilting results. Regarding the pitching analysis, the loading condition had a great effect on the results. The maximal angle was 58° in the empty loading state and 60° in the fully loaded state for the downhill path and 60° in the empty loading state and 52° in the fully loaded state for the uphill path. Caution is required to prevent the harvester from rolling over when it is moving uphill.
According to the results of the obstacle collision analysis, the maximal allowable height of the obstacle was below 500 mm. When the hot pepper harvester faced an obstacle with a 500-mm height, the RC of the machine gets higher than the CG of the machine. It caused the roll-over, and the angle at the start of the roll-over was 26°. Compared to the tilting analysis results, the working speed affected the movement and the results of the obstacle collision seem more realistic.
The spin turn exhibited the shortest rotation radius (900 mm in the empty state and 870 mm in fully loaded state). The soft turn resulted in rotation radius of 2000 mm in the first gear shift and 3000 mm in the second gear shift in both empty and fully loaded states. Furthermore, the brake turn resulted in rotation radius of 1200 mm in the empty and fully loaded states. By using the spin turn, the hot pepper harvester can be operated without hurting crops, and the collision accidents rate can be minimized.
Change history
25 August 2021
A Correction to this paper has been published: https://doi.org/10.1007/s42853-021-00107-9
References
Choi, Y., Jun, H. J., Lee, C. K., Lee, C. S., Yoo, S. N., Suh, S. R., & Choi, Y. S. (2010). Development of a mechanical harvesting system for red pepper (I) surveys on conventional pepper cultivation and mechanization of pepper harvesting, Journal of biosystems engineering., 35(6), 367–372 (in Korean, with English abstract). https://doi.org/10.5307//JBE.2010.35.6.367.
Kim, J. H., & Park, S. J. (2015). Running stability analysis of the semi-crawler type mini-forwarder by using a dynamic analysis program. Journal of Korean Forest Society, 104(1), 98–103 (In Korean, with English abstract). https://doi.org/10.14578/JKFS.2015.104.1.98.
Korea Rural Economic Institute (KREI). 2017. A Survey on the mixed distribution of red pepper powder and a study on the improvement plan (In Korean).
Korean Consumer Agency (KCA). (2017). Hazard information analysis of agricultural machinery (In Korean).
Korean Statistical Information Service (KOSIS). (2017). Field crop mechanization rate (In Korean).
Korean Statistical Information Service (KOSIS). 2018. Cultivated Area of Rice and Pepper in 2018 (In Korean).
Kwon, J. S., Yang, H. A., & Yoo, D. I. (2016). An analysis on the effect of aging farmers on agricultural machinery accidents. Korean Journal of Agricultural Science, 32(1), 57–62 (in Korean, with English abstract).
Lee, C. H., Park, S. J., Kim, C. S., Rhee, J. Y., Kim, M. H., & Kim, Y. H. (1995). Determination of development strategy for a pepper harvester. Korean Society for Agricultural Machinery, 20(1), 22–35 (in Korean, with English abstract).
Lim, C. S., & Choi, Y. W. (2010). The experimental study on the transient brake time of vehicles by road pavement and friction coefficient. Korean Society of Civil Engineers, 30(6), 587–597 (In Korean, with English abstract).
Ministry of Agriculture, Food and Rural Affairs (MAFRA). (2017). 2017 Food Information Statistics (In Korean).
National Institure of Agricultural Sciences (NIAS). (2016). Risk assessment by analyzing safety accident cases of agricultural machinery. New Delhi: NIAS (in Korean).
Rural Development Administration (RDA). (2006). Development of harvest and postharvest on high quality processing technologies for once-over-harvest red pepper (In Korea).
Rural Development Administration (RDA). (2011). Soil classification and commentary in Korea. Reference No. 11-1390802-000391-01. Suwon, Republic of Korea: National Institute of Agricultural Sciences (In Korean).
Rural Development Administration (RDA). (2016). Risk assessment by analyzing safety accident cases of agricultural machinery (In Korean).
Funding
This work was supported by the Technology Innovation Program (Project No. PJ2003975, development of intelligent crawler-based traveling platform for multipurpose farming) and funded by the Ministry of Trade, Industry & Energy (MOTIE, Republic of Korea) and Korea Evaluation Institute of Industrial Technology (KEIT, Republic of Korea).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
This article has been retracted. Please see the retraction notice for more detail:https://doi.org/10.1007/s42853-021-00107-9
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kang, S., Kim, J., Kim, Y. et al. RETRACTED ARTICLE: Simulation Study of Dynamic Characteristics of Hot Pepper Harvester. J. Biosyst. Eng. 45, 333–340 (2020). https://doi.org/10.1007/s42853-020-00074-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42853-020-00074-7