
Abstract
The ever-increasing anthropogenic activities that pose a significant threat to environmental security and sustainability have spurred geophysicists to review enhance geophysical techniques for shallow geophysical investigations, especially in identifying illegal buried materials. This article applied very low-frequency electromagnetic (VLF-EM) at an experimental geophysical site (EGS) to examine the geophysical response over various buried targets. The VLF-EM data acquired on the site with and without buried targets demonstrate the nature of the anomalies and the characteristic signals of the buried targets. There are significant variations in the anomalies source-bodied between the site with and without buried targets. The result of the pre-burial investigation shows no major contrast in the equivalent current density values across the site without targets. Minors and major anomalies were encountered after burying the targets corresponding to the buried targets. Some signals become stronger over a large buried target. However, there were a few undetected targets and some cases of unsatisfied results, which were also discussed. The performance of the VLF-EM method in terms of depth estimation was also examined. A significant variation was noted due to the presence of the buried targets and it was noted that the current density seems to always emerge maximally and minimally around the conductor targets and non-conductive targets, respectively. The failure of the VLF-EM to detect the buried pipes in various orientations was examined. The VLF-EM method is more consistent at small spacing and it can be very useful for identifying underground metallic and non-metallic targets. The study successfully provides useful information to complement the complexity of the use of geophysical methods while enhancing the subsurface information and understanding of VLF-EM anomalies or responses generated by various targets such as subsurface geological structures, buried waste contaminants and underground utilities to boost environmental studies and engineering investigations.
Article highlights
-
Examination of the VLF-EM responses on various buried targets at a controlled geophysical site.
-
VLF-EM signal appears stronger over the large buried targets compared to smaller targets.
-
Application of the VLF-EM responses for geophysical equipment calibration and on-site training students
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The recent ever-upsurging interest in illegally buried detection to ensure total environmental security has spurred geophysicists to enhance geophysical techniques for shallow geophysical investigations, especially in identifying buried targets. Geophysical investigations have been widely employed by engineers and geoscientists to adequately provide vital information about the nature of the subsurface for a prerequisite engineering construction and urban planning [1,2,3]. In recent times, several geophysical methods have been used to identify buried contaminants such as landfills, illegally buried waste, and underground utilities such as metallic storage tanks, buried cables and pipes [4,5,6]. However, these buried targets often exhibit different conductive and non-conductive properties compared to the surrounding soils [1, 7], which can be detected using VLF-EM. VLF is a non-destructive and non-intrusive geophysical method of surveying the subsurface targets that enables exploration of the earth’s subsurface without contact with the ground and is suitable for a wide range area to map regional geology for decades [8,9,10].
Today, many of the challenges facing society are underground underlain problems, starting from minerals, groundwater and advanced underground infrastructural driving the energy sectors and environment [1]. Therefore, understanding the subsurface underlain structures is critical for creating a better future. For instance, according to a remarkable study, the application of VLF-EM in groundwater exploration has not gained substantial usage, especially in the sedimentary basins due to the inadequate understanding of the VLF-EM applications [11]. As a result of this inconsistency, the use of the VLF-EM technique has been limited in recent times. However, ground VLF-EM geophysical prospecting for conductive and non-conductive targets has received remarkable driven force with the new development in lightweight receivers, which has reduced the large geologic noise component emerging from the considerably high‐transmitted frequency [11]. In response to this development, this study buried several targets to create a platform to enhance the understanding of the subsurface challenges and try to resolve them with the VLF-EM geophysical tool. The EM methods are very sensitive geophysical tools to the changes in the electrical properties of subsurface materials [12]. Several promising geophysical methods such as ground penetrating radar (GPR) and electrical resistivity tomography (ERT) have been considered as one of the best geophysical methods for detecting buried targets [13,14,15,16,17]. However, exploring the effectiveness of VLF-EM in detecting buried targets can provide an alternative geophysical method to assess buried foundations where either ERT or GPR is not available.
The current study is targeted at installing several subsurface targets different from the existing target within the Ahmadu Bello University Geophysical Test Site (ABUGTS) to exploit the VLF-EM responses in various burial scenarios to enhance the understanding of the subsurface information in the context of environmental and engineering investigations. ABUGTS is a Controlled EGS where several subsurface targets of known materials, properties, dimensions, and geometries have been installed at different orientations and depths to replicate real-life field investigation scenarios. The core ideas of this study include but are not limited to; developing a micro-geophysical test site for educational activity and studying the VLF-EM signals generated by the buried targets. In Sects. 4 and 5, the study focuses on designing the framework and the procedure for the construction of EGS. The physical properties of the buried targets were determined. In Sect. 6, the study explores the effectiveness of VLF-EM over the various buried targets. The responses of VLF-EM analysis of both Karous-Hjelt and Fraser were discussed, which enables us to determine the anomaly behaviour or signal of VLF-EM. The variations in both signal components encountered along the survey transect were also analyzed to estimate the depth, position, size, and conductive buried target sources. In this case, since the properties and geometries of the buried targets are known, the study could be used to enhance the survey procedures and the interpretational skills of the professional or field personnel who routinely used VLF-EM to perform field surveys.
2 Site description
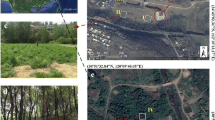
The site belongs to the basement complex of Nigeria underlain by Precambrian rocks [18], which occupy more than half of Nigeria's total landmass. The rocks accommodate the metasediments, which are made up of gneisses and they are sometimes subjected to weather activities. The Basement complex is largely made up of various rocks such as migmatites, schist, metasediments quartz, and gneisses, while the younger granites are believed to associate with distinct exposed surfaces [19]. The site is located at Ahmadu Bello University farmland, Zaria, Nigeria, on the geographical coordinate of latitude 11° 12′ 11″ N to 11° 11′ 28″ N and longitude 007° 35′ 42″ E to 007° 35′ 34″ E (Fig. 1). The University farmland where the controlled geophysical test site was established is a research area of the university in lateritic clay soil with several buried targets [20]. The site experiences annual rainfall ranging between 1000 to 1500 mm with an average temperature of 30 °C [21]. The previous studies show that the geo-electrical section of the site is made up of three to four distinctive geological layers. The first layer, often referred to as the topsoil consists of clayed, sandy, and brownish-red lateritic soil with an overburdened thickness varying from 3 to 20 m [22,23,24]. The overburdened topsoil layer has geo-electrical resistivity values ranging from 370 to 1100 Ωm [23, 24]. The resistivity values distributed across the geological layers have significant effects on the geophysical responses [25].

The Map of the Study Area showing the location of ABUGTS and current targets
3 Materials and methods
The EM survey was carried out with the help of Terra VLF receiver equipment, and Global Position System (GPS), a measuring tape, pegs, hammers, and a power source. Other materials used include buried targets such as steel drums, plastic buckets, hollow metallic pipes, concrete blocks, floor tiles, and 4-cylinder engine blocks, which were spatially dispatched and buried along four lines (profiles) (Fig. 2). These materials were selected to generate magnetic, electromagnetic, and electric responses, which cut across four buried profile lines within the site etc. Geophysical techniques involve the application of principles of physics for quantitative physical measurements to investigate the subsurface of the earth [26, 27]. There are several geophysical methods, the VLF-EM technique makes use of signal propagation from nearby transmitters operating within the range of a certain frequency band. According to [9, 10, 28], the VLF method makes use of military navigation radio transmitters operating within a 15–30 Hz frequency range to receive and transmit signal radiation. VLF technique makes use of powerful remote radio transmitters set up across the world for military communications with about 42 military communication transmitters operating globally [28, 29]. When an EM wave impinges on the ground surface, it is reflected into the air and refracted into the earth [30]. The transmitter signals propagate millions of meters over the earth’s surface and are usually uniform in the atmosphere [30]. According to the basic EM theory, there exists a relationship between the primary magnetic field (\({H}_{P}\)) and magnetic secondary field (\({H}_{S}\)) created by a conductive body that acts as a second source [29, 31]. That is, the currents in the conducting body like fractures are created when an EM field (radio waves) passes through it [32], thereby generating another magnetic field (\({H}_{S}\)). The sum of \({H}_{S}\) and \({H}_{P}\) (resulting vector) produces a time-varying elliptically polarized field [29]. The elliptical shape consists of two components of the same frequency, but different phases and amplitude. The \({H}_{P}\) is in-phase amplitude and is the real component, while the \({H}_{S}\) is out-of-phase amplitude and is the imaginary component [29]. Consequently, the EM field equation for a conductive medium can be expressed by the Helmholtz equation derived from the Maxwell equations [10]:
where H represents the magnetic field, E represents the electric field, σ represents conductivity (measured in mS/m), μ represents permeability (measured in H/m) and ω represents the angular frequency. B both the ellipticity (e) and tilt angle (θ) in contrast, are computed by Eq. (2) [9].
where Φ represents the change in phase angle between \({H}_{S}\) and \({H}_{P}\), α represents the angle above \({H}_{P}\) due to the coupling between the subsurface structure and the transmitter. Thus: \(cos\Phi\) is in-phase and is the real component of the Hs field. The tilt tangent angle (\(\theta\)) is directly proportional to the real component (\({H}_{S}\)), measured in the vertical direction.

Map describing the spatial distribution of the buried targets and the 2D model of the host soil showing the buried targets at various locations, depths and orientations
4 Data acquisition and processing
The VLF-EM data was acquired on the gridded site of 5 m spacing (Fig. 3). A total of twelve (12) buried profiles with fifty-five (55) stations on each profile making about 660 data stations on a 1.0 m spacing to enhance the survey resolution. VLF-EM was selected as a key tool to detect the targets due to its ability to detect near-surface structures. Though VLF EM technology operates on the frequency range of 15–30 kHz. VLF parameters such as real and imaginary parts of the tipper (VLF-EM response) were obtained using a radio transmitter frequency. The VLF-EM response was acquired through UMS, a Russian station (17.1 kHz), which generates a strong signal in the survey region with a suitable frequency (17.1 kHz) for the current survey target. This was chosen in the building of the data set via measurement at 660 stations of 5-m spacing distributed intervals on 12 parallel profiles. The VLF data acquired on the 1.0 m and 5.0 m spacing gridding were interpreted using the KHFFILT software and Surfer 11 version. The procedures of the filtering were based on the principle developed by Karous-Hjelt and Fraser filtering of geophysical VLF data [33]. The filter enables us to compute the pseudo-section of the relative current density that produces the observed real (in-phase) data and generates a smoother form of an effect while extracting unwanted fluctuations [34]. For each profile, a plot of the raw data, Fraser filtered data and the Karous-Hjelt plots (Figs. 3, 4, 5, 6). The KHFFILT software was used to transform VLF-EM anomalies from the raw data to Karous-Helt pseudo-section, Fraser filtered data, raw data and where the reverse crossovers were transformed to negative values and proper crossovers transformed to positive peak readings [10].

VLF-EM Real component across profiles 1: a site without targets b site with buried targets of 5.0 m spacing data acquisition, and b site with buried targets of 1.0 m spacing data acquisition

VLF-EM Real component across profiles 2: a site without targets b site with buried targets

VLF-EM Real component across profiles 3: a site without targets b site with buried targets

VLF-EM Real component across profiles 4: a site without targets b site with buried targets
5 Presentation of results
Figures 3, 4, 5, 6 present typical current density sections of the Fraser filter data and the 2D Karous-Hjelt filtered (KHFfilt) pseudo-sections, which demonstrate the nature of the VLF-EM anomalies and the characteristic signals generated by various buried targets. The data were collected on the site with and without buried targets along the same profiles. The colour pane indicates conductive, nonconductive and intermediate sections. The resistive medium is presented in a bluish-to-green colour, while the conductive medium is indicated in a yellowish-to-red colour range. The Fraser-filtered data enhances the location of the non-conductive and conductive anomalies due to its ability to extract false impressions from the false cross-over points that normally pose challenges during VLF data interpretation [12, 32].
Figure 3a–c presents the VLF-EM real component data along profile 1. Figure 3a is the result of the VLF-EM survey before the buried targets at the site. The result shows no major anomalies except minor anomalies encountered at 10 m, 30 m and 50 m. The minor anomalies encountered indicate the site's inhomogeneity nature made up of loose and consolidated subsurface materials. Figure 3b presents the VLF-EM responses along profile 1 acquired on 5.0 m spacing after the buried targets. Two major anomalies were encountered at a horizontal distance of 20–35 m and 45–50 m alongside within profile 1 with significant mismatches in the anomalies generated as most of the responses show poor results in terms of the sizes, depths, and positions of the buried targets. The unexpected results obtained at 5.0 m spacing are attributed to the sizes (small) and depths (shallow) of the buried targets. For instance, some non-conductive buried target generates high equivalent current density values indicating conductive media, while some conductive buried target produces low equivalent current density values indicating non-conductive body. Figure 3c shows the results of VLF responses and anomalies generated over four buried targets. The results indicate both minor and major VLF anomalies along the profile. The four major VLF anomalies emerged at position 5.0 m, 20.0 m, 35.0 m and 50.0 m corresponding to the position of the buried. However, a minor anomaly was encountered at position 10 m which may be due to some consolidated subsurface materials. The VLF-EM method is more consistent at small spacing and it can be very useful for identifying underground utilities or near-surface targets where other methods are not available or unachievable.
Figure 4a, b presents the result of VLF-EM along profile 2 acquired on 1.0 m spacing at the site with and without buried targets. Figure 4a indicates the result of the VLF-EM survey at the site without buried targets. The result shows some major high equivalent current density (conductive media) or low equivalent current density (non-conductive media) across profile 2 when no targets were buried. The anomalies demonstrated the inhomogeneity nature of the site. However, contrary results were obtained in Figure 4b, as most of the anomalies occurred in contrary positions with ambiguous sizes and depths. For instance, only in location 5.0 m indicates a positive match, while the anomalies emerge at the positions 25 m, 40 m and 50 m are contrary to the position of the buried targets. However, the location 20 m where the 4-cylinder engine block was buried shows no significant anomaly.
Figure 5a,b presents the result of the VLF-EM real component data along profile 3 acquired on 1.0 m spacing. The result on the natural ground (without buried targets) presented in Fig. 5a indicates no serious anomalies except at locations 5.0 m, 15 m and 27 m, where some insignificant anomalies emerged. Figure 5b displays the VLF-EM signals or response over two buried targets along profile 3. The two distinctive anomalies highly corresponded to the buried targets of non-conductive (floor tiles) and conductive (2 pipes) materials alongside some insignificant anomalies.
Figure 6a,b represents the result of the VLF-EM real component data along profile 4 acquired on 1.0 m spacing. Figure 6a shows the VLF-EM results demonstrating the nature of the site along profile 4 when no targets are buried. The result shows no significant anomalies (either low or high equivalent current density) along the profile, which demonstrated a relative homogeneity of the 55 m profile. The figure shows a positive match of the VLF anomalies with the position of buried targets. In Fig. 6b, one major distinctive anomaly was encountered at 20 m alongside some insignificant anomalies emerging at positions 35 m, and 50 m, where two targets (floor tile and metallic pipe) were previously buried. The result shows a good match with the buried targets. However, there are other insignificant anomalies found along profile 4, which may be attributed to the nature of the host soil.
Figure 7 is the surface contour map of the VLF data (tilt angle (θ) acquired on 12 profiles with 12 station points on each. The map demonstrates the position of the subsurface anomalous source bodies at the site with and without buried targets. The map indicates significant variation between the site with and without buried targets with distinctive anomalies source-bodied. Major and minor anomalies were obtained along the profiles. It was noted that the VLF signal become stronger over a large conductive and non-conductive buried target. This is expected since a change in VLF-EM response to any contacts of faults causes successive variations in the E-field [8, 28, 32, 35]. However, some buried targets were not captured at all due to the size (small) of the targets. The contouring of the surface plot of filtered in-phase with Surfer software presents a better position of buried targets compared to KHFFILT software.

A Surface plot of filtered in-phase data against the distance of ABUGTS: a Pre-burial survey, b Post-burial survey. Numbers 1–13 in Fig. 7b are positions of the field buried targets
6 Discussion
Seven (7) targets were distinctively captured out of the thirteen (13) buried targets. The captured targets include steel drums buried in various orientations, while undetected targets such as a 4-cylinder car engine block, hollow pipes and some non-conductive targets. The VLF-EM method registered a 47% degree of alignment with the actual depth of the buried targets based on the investigated targets, which is far lower than survey accuracy. Therefore, the use of the VLF-EM method for subsurface investigation is not suitable for a survey where depth estimation is of prime interest. However, to improve the depth estimates of buried targets and related underground structures, the spacing interval of data acquisition can be reduced. This establishes a greater precision in the depth estimation of underground targets with authenticated subsurface information for proper urban planning. In addition, there were inconsistencies and mismatches in VLF-EM anomalies created by the buried targets in sizes, depths and positions of the buried targets, which may question the integrity of the VLF-EM method in depth and size estimation of targets. The inconsistency increases with an increase in the spacing of the data acquisition station interval. However, the interpreted data indicates that the VLF-EM method shows moderate competency in detecting buried targets.
In addition, the pre-curial investigation that the conductive and non-conductive zones were characterized by current density values of − 20 to 20, while the post-burial investigation indicates current density values of − 40 to 40. A significant variation was noted due to the presence of the buried targets along the four profiles. Observations show that the current density seems to always emerge maximally and minimally around the conductor targets and non-conductive targets, respectively. However, a few buried targets such as the hollow pipe buried in various orientations (inclined, vertical, and horizontal positions) were not captured after ensuring that the strike direction of the buried targets was perpendicular to the source fields. The failure of the VLF-EM to detect the buried pipes in various orientations may be due to the size of the targets. According to previous studies, the VLF-EM method shows strength in detecting straight and long conductors [36, 37]. Based on the investigation performed on the 1.0 m, 2.0 m and 3.0 m long and 5.0 cm radius hollow pipes in various orientations, it was noted that the VLF-EM method is unlikely to detect buried hollow pipes of 1.0–3.0 m length and less than 5.0 m radius. Therefore, much longer pipes or related conductors of longer lengths (at least 10 m) could be tested in future studies. However, the exact length that can be captured by the VLF-EM method may vary depending on several factors such as the size, depth and orientation of the buried targets since the steel drums with a large diameter were detected. However, the ground excavation (disturbance) may have also had a significant effect on the signal generated and further investigations may have required overtime. VLF-EM technique appears to be a very simple, convenient, cheap, and time-saving geophysical tool for investigating subsurface targets and it is considered efficient for environmental and engineering investigation due to its effectiveness in detecting both conductive and non-conductive buried targets. The buried targets within the site and the VLF-EM responses can be used to calibrate geophysical equipment and on-site training of students.
7 Conclusion
The VLF-EM geophysical method has been successfully used to characterize the ABUGTS with and without buried targets. The results show no significant variations in the conductive and non-conductive zones within the site before the buried targets. The VLF-EM transmitter traversing across the subsurface of the Earth amplifies signals over large conductive buried materials and weak signals over resistive buried materials. However, there are minor variations in the conductive and non-conductive zones within the site without buried targets, which may be attributed to the inhomogeneity of the site subsurface. Minor and major VLF-EM anomalies emerged at different locations with the dominant VLF-EM anomalies appearing stronger at the larger buried targets such as steel drums, which are mostly buried at depths of less than 2 m from the ground surface. Weak VLF-EM signals were detected at some locations of the smaller buried targets such as engine blocks, and other non-metallic targets. The buried non-metallic material generated low current density resenting non-conductive zones, while the buried metallic materials generated high current density resenting conductive zones with stronger signals on larger buried bodies and weak signals on smaller buried bodies. Locating the position of buried objects with the VLF-EM technique appears more suitable, especially at smaller survey spacing intervals.
The pre-burial and post-burial investigations show that buried material has a significant impact on the natural geophysical signature of the subsurface. In addition, the VLF-EM method is unlikely to detect buried hollow pipes of small length with a small radius. Thus, much longer pipes or related conductors of longer lengths (at least 10 m) could be examined with VLF-EM in future studies. This study successfully provides useful information to complement the complexity of the use of geophysical methods while enhancing the subsurface information and understanding of VLF-EM anomalies or effects generated by various targets such as subsurface geological structures, buried waste contaminants and underground utilities to boost environmental studies and engineering investigations. It also provides a platform for educational activities such as on-site training of students and calibration of geophysical equipment.
Data availability
The datasets generated during and/or analyzed during this study are available on request.
References
Alao JO, Lawal KM, Dewu B, Raimi J. The evolving roles of geophysical test sites in engineering, science and technology. Acta Geophys. 2023. https://doi.org/10.1007/s11600-023-01096-3.
Chung SG, Giao PH, Tanaka H. Geotechnical characteristics and engineering problems of,” Swets & Zeitlinger, Lisse, ISBN 90-5809-537-1, pp 505–541, 2003.
Rosado-Fuentes A, Ceballosb AA, Quinterob EH, Galvánb CA, Corralesb JL, Péreza GM. Geophysical characterization, design and construction of the Teoloyucan geophysical test site for archaeological and engineering applications, Central Mexico. J Appl Geophys. 2021;194: 104459. https://doi.org/10.1016/j.jappgeo.2021.104459.
Marchetti M, Cafarella L, Di Mauro D, Zirizzotti A. Ground magnetometric survey and integrated geophysical methods for solid buried waste detection: a case study. Ann Geophys. 2002;45(3–4):563–73.
Al-Tarazi E, Abu Rajab J, Al-Naqa A, El-Waheidi M. Detecting leachate plumes and groundwater pollution at Ruseifa municipal landfill utilizing VLF-EM method. J Appl Geophys. 2008;65:121–31.
Marchetti M, Sapia V, Settim A. Magnetic anomalies of steel drums: a review of the literature and research results of the Istituto Nazionale di Geofisica e Vulcanologia (INGV). Ann Geophys. 2013;56:1–23. https://doi.org/10.4401/ag-6201.
Omeiza AJ, Lawal KM, Dewu B, Raimi J. Development of geophysical test sites and its impacts on the research and education activities. Bull Eng Geol Environ. 2023;82:81. https://doi.org/10.1007/s10064-023-03076-9.
Gürer A, Bayrak M, Gürer ÖF. A VLF survey using current gathering phenomena for tracing buried faults of Fethiye-Burdur Fault Zone, Turkey. J Appl Geophys. 2009;68:437–47. https://doi.org/10.1016/j.jappgeo.2009.03.011.
Zhang Z. The geophysical very low-frequency electromagnetic (VLF-EM) method: effects of topography and surface water investigated with simulations and field measurements. Unpublished MSc Thesis, Department of Geological Sciences, University of Saskatchewan Saskatoon: https://harvest.usask.ca/bitstream/handle/10388/ETD-2015-03-2020/ZHANG-THESIS.pdf;sequence=6, pp 1–128, 2015.
Telford WM, Geldart LP, Sheriff ER. Applied geophysics. 2nd ed. New York: Cambridge University Press; 1990.
Ohwoghere-Asuma O, Chinyem IF, Aweto KE, Iserhien-Emekeme R. The use of very low-frequency electromagnetic survey in the mapping of groundwater condition in oporoza-gbamaratu area of the Niger Delta. Appl Water Sci. 2020;10:164. https://doi.org/10.1007/s13201-020-01244-w.
Amini N. Pipes detection using VLF method. Near Surface 2005—Palermo, Italy, 4–7; Conference Paper, 2005.https://doi.org/10.3997/2214-4609-pdb.13.P026
P. H. Giao, C. Vichalai, Construction of a geophysical testing site on soft clays. In: Conference Paper Proc. of the 8th SEGJ Intl’ symposium—imaging and interpretation, Kyoto, Japan. pp. 277–282, 2006. https://doi.org/10.1190/segj082006-001.56
Porsani JL, Slob E, Lima RS, Leite ND. Comparing detection and location performance of perpendicular and parallel broadside GPR antenna orientations. J Appl Geophys. 2010;70(1):1–8. https://doi.org/10.1016/j.jappgeo.200.
Poluha B, Porsani JL, Almeida ER, Dos Sant V, Allen SJ, Poluha B, Porsani JL. Depth estimates of buried utility systems using the GPR method: studies at the IAG/USP geophysics test site. Int J Geosci. 2017;8:726–42. https://doi.org/10.4236/ijg.2017.85040.
Cavalcanti MM, Rocha MP, Blum M, Borges WR. The forensic geophysical controlled research site of the University of Brasilia, Brazil: results from methods GPR and electrical resistivity tomography. Forensic Sci Int. 2018. https://doi.org/10.1016/j.forsciint.2018.09.033.
Chantasen N, Boonpoonga A, Burintramart S, Athikulwongse K, Akkaraekthalin P. Automatic detection and classification of buried objects using ground-penetrating radar for counter-improvised explosive devices. Radio Sci. 2018;53:210–27. https://doi.org/10.1002/2017RS006402.
Oyawoye MO. The basement complex of Nigeria. In: Dessauvagie TFJ, Whiteman AJ, editors, African Geology. Ibadan ofUniversity Press, Ibadan Nigeria, 1970.
Raimi J, Dewu B, Sule P. An interpretation of structures from the aeromagnetic field over a region in the Nigerian Younger Granite Province. Int J Geosci. 2014;5:313–23. https://doi.org/10.4236/ijg.2014.53031.
Osumeje JO, Eshimiakhe D, Bello Y, Lawal KM. Assessment of open-software resources in Python using real two-dimensional geophysical model. J Geol Geophys. 2023;12:1112. https://doi.org/10.35248/2381-8719.23.12.1112.
Dan-Hassan MA, Olorunfemi MO. Hydrogeophysical investigation of a basement terrain in the north-central part of Kaduna State, Nigeria. J Min Geol. 1990;35(2):189–206.
NWRI. Groundwater research development completion report. Borehole NR. GWR/HG-05(1/6). National Water Resources Institute (NWRI), 2002.
Zainab M. Two dimensional electrical resistivity investigation at Ahmadu Bello University, proposed geophysical test site, Zaria, Kaduna State. Unpublished MSc Thesis, Department of Physics, Faculty of Physical Science Ahmadu Bello University, Zaria, 2016.
Daniel E, Raimi J, Zainab M. Two-dimensional image of seismic refraction tomography and electrical resistivity tomography survey in a geophysical proposed test site at Shika, Ahmadu Bello University Nigeria. Glob J Sci Front Res H Environ Earth Sci. 2019;4:56–66.
Alao JO, Lawal KM, Dewu B, Raimi J. Construction of multi-purposes geophysical test site on a lateritic clay soil. Arab J Geosci. 2023;82:81.
Osumeje JO, Oniku AS, Meludu OC, Matthew OM, Usman A. Interpretation of aeromagnetic and satellite data over part of Maru Schist Belt, Northwestern Nigeria. J Geol Geophys. 2019;8:1. https://doi.org/10.4172/2381-8719.1000457.
Osumeje JO, Eshimiakhe D, Kudanmya EA, Ojo I, Lawal KM. Geophysical investigation of part of Ahmadu Bello University Farm, Nigeria. Afr Sci Rep. 2023;2:49. https://doi.org/10.46481/asr.2022.2.1.49.
Sundararajan N. VLFPROS—a Matlab code for processing of VLF-EM data. Comput Geosci. 2006;32(10):1806–13. https://doi.org/10.1016/j.cageo.2006.02.021.
Oyekan HA. Application of very low frequency (VLF) electromagnetic method to mineral exploration (mining geophysics) with case study review. Unpublished MSc Thesis. Department of Applied Geophysics University of Ilorin, Ilorin, Nigeria: Available on: https://www.academia.edu/38618087, p. 34, 2019.
Sharma SP, Arkoprovo B, Baranwal VC. Very low-frequency electromagnetic method: A shallow subsurface investigation technique for geophysical applications. In: Sengupta D, editor, Recent trends in modelling of environmental contaminants.https://doi.org/10.1007/978-81-322-1783-1_5 2014.
Eppelbaum LV. VLF-method of geophysical prospecting: a non-conventional system of processing and interpretation (implementation in the Caucasian Ore Deposits). Earth Sci. 2021;2:16–38. https://doi.org/10.33677/ggianas20210200060.
Babu VR, Ram S, Sundararajan N. Modeling and inversion of magnetic and VLF-EM data with an application to basement fractures: a case study from Raigarh, India. Geophysics. 2007;72(5):B133–40. https://doi.org/10.1190/1.2759921.
Karous M, Hjelt SE. Linear filtering of VLF dip-angle measurements. Geophys Prospect. 1983;31:782–94. https://doi.org/10.1111/j.1365-2478.1983.tb01085.x.
Fraser DC. Contouring of VLF-EM data. Geophysics. 1969;34:958–67.
Tawfik M, Farag KS, Ibraheem M. The efficiency of (VLF-EM) method in detecting buried old tunnels in the Egyptian Nile Delta. In: 73rd EAGE conference & exhibition incorporating SPE EUROPEC 2011 Vienna, 2011.
Jones F. Quick overview: summary of VLF surveying and data. University of British Columbia (UBC); Earth and Ocean Sciences; 2018.
NJDEP New Jersey Department of Environmental Protection (NJDEP). Field Sampling Procedures Manual. Chapter 8–Page 1 of 46. https://www.nj.gov/dep/srp/guidance/fspm/manual_edition/2005/fsmp2005.pdf, 2005.
Porsani LL, Almeida ER, Poluha B, dos Santos V. GPR tomographic imaging of concrete tubes and steel/plastic tanks buried in IAG/USP geophysical test site, Brazil. Int J Geosci. 2017. https://doi.org/10.4236/ijg.2017.85035.
Acknowledgements
The author wishes to acknowledge the support of the Department of Physics, Ahmadu Bello University for providing the Geophysical equipment used for Data collection and assessment to the ABUGTS.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Contributions
Conceptual framework, Investigation, Data acquisition, Data processing, Analysis, Resources, Reviewing and Editing of the manuscript were done by all the authors OJA, MKL, BBMD, and RJ while writing of the manuscript was done by OJA.
Corresponding author
Ethics declarations
Competing interests
The authors have no relevant financial or nonfinancial conflicts of interest to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alao, J.O., Lawal, K.M., Dewu, B.B.M. et al. The effectiveness of very low-frequency electromagnetics (VLF-EM) method in detecting buried targets at a controlled site. Discov Appl Sci 6, 29 (2024). https://doi.org/10.1007/s42452-024-05650-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-024-05650-6