
Abstract
Significance of this research is based on torque controlling strategies in hybrid electric vehicle. The traction motor of a hybrid electric commercial vehicle must have a high power density-to-weight ratio and excellent torque at extremely low speeds. A proportional-integral controller estimates the high-resolution rotor position based on the difference between actual as well as reference output power. This technique can correct for hall position sensor installation error and also accurately estimate rotor position. In this study, a current proportional integral controller is also used to determine the permanent magnetic flux linkage. Experiments are used to test other key metrics such as d-axis and q-axis inductances, stator resistance, and energy loss. The measured parameters are kept in lookup tables that span the whole operating range at various current levels. A maximum torque per ampere control methodology, paired with the feed forward parameter iteration method, may be used to produce accurate and efficient torque control based on these precise parameters. The standard driving cycle performance requirements of the modelled Federal Test Procedure vehicle is analysed in the article for understanding the real model requirements of the vehicle. The efficacy of the proposed methodology using Matlab/Simulink environment is analysed. Both modelling and experimental findings validate the efficacy, torque ripple, stator and rotor flux, sensitivity of the vehicle parameter as well as the computational complexity of the proposed methodology.
Article Highlights
-
Enhanced torque density performance and kept torque ripple at a low level for a wide range of current densities.
-
Low-resolution Hall Effect sensors can be used instead of resolvers in electric vehicles to save cost and weight when interior permanent-magnet synchronous machine is in high power.
-
To evaluate the system efficiency, the losses of the power inverter's IGBTs and diodes (Conduction) are modeled & computed.
Similar content being viewed by others


Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
1 Introduction
The interior permanent-magnet synchronous machine (IPMSM) is currently often employed in electric vehicle technologies and its applications because of its very high torque density [1]. Implementing an appropriate control strategy is necessary for effective machine operation. The control is frequently based on lookup tables that span the full working region due to the inherent non-linearity. Lookup tables that only include locations on the margins of the working region are used in the suggested control approach. While retaining an acceptable degree of precision, this reduces the need for storage and calculation work [2].
The average motor speed is the most often used approach for estimating rotor position [3]. When the motor speed fluctuates often, this technique may result in a substantial mistake and control strategy failure. In [4] a vector-tracking observer was presented to estimate the rotor position. This approach requires the acquisition of stator voltages, increasing the system’s cost and complexity. In [5] an enhanced vector-tracking observer was developed to reduce system complexity. [6] Presented an approach based on back electromotive force (EMF). This approach, while capable of obtaining the exact rotor speed, is incapable of obtaining the correct rotor location. In [7], a flux estimate approach for a spotless permanent magnet synchronous motor (PMSM) was developed.
To determine the location and speed of the rotor, an enhanced square root unscented Kalman filter (SRUKF) was suggested [8]. In addition, instead of discrete Hall sensors, some research [9] employed linear Hall sensors to assess rotor position. Precise parameters are required for precise and efficient control. To achieve parameter identification, there are primarily two types of approaches presented. The first relies on offline measurements, whereas the second relies on real-time estimating arithmetic [9]. [10] Investigated real-time estimating arithmetic based on the PMSM model. Because not all parameters are recognizable in the steady state, some must be assumed to be known. In [11], a technique for estimating stator resistance and flux linkage was presented by injecting short-period d-axis current into surface PMSM.
It is not, however, acceptable for use in motor vehicles. Only voltage sensors were used to evaluate the mechanical properties of induction motors [12]. The fluctuation of the d-axis and q-axis inductances measured offline [13] or estimated from the finite element [14] were proposed in consideration of cross saturation. [15] Suggested an analytical calculation approach for d-axis and q-axis inductances in IPMSM based on winding function theory. [16] Suggested an adaptive parameter estimator capable of achieving Maximum Torque per Ampere (MTPA) management.
Hybrid Electric Vehicle (HEV) have recently gained popularity as the next generation of automobiles to help reduce air pollution, and a lot of research has been done in this area. However, more studies into hybrid commercial electric vehicle (HECV) are still present in their early stages mostly in the places like Europe and the United States [17]. In recent years, the main commercial vehicle manufacturers in the United States, Japan, and Europe have supported much research in the field on compressed natural gas (CNG) hybrid buses, fuel cell buses, hybrid gasoline vehicles, as well as hybrid diesel vehicles. The traction motor, inverter, battery pack, as well as engine make up the HECV system. The HECV system traction motor could differ significantly from the HEV’s in terms of torque at low speeds and power-to-weight ratio. Additionally, it should be feasible to operate at high torque at low speeds while maintaining stability at high speeds. HECVs can use IPMSM. A reduced-order observer, MTPA control algorithm, as well as the field weakening control technique, are discussed in this study to speed up IPMSM control for HECV [18].
Based on low-resolution Hall-effect sensors, this research proposes an effective way for achieving precise and efficient torque management of an IPMSM in electric automobiles. For torque control, several critical parameters are calculated [19]. An estimating approach based on the power closed-loop with low-resolution Hall-effect sensors is presented to achieve the high-resolution rotor position. This approach can correct for Hall position sensor installation error and constantly and accurately estimate rotor position. A Current Proportional Integral (PI) controller is used to determine the permanent magnetic flux linkage. Experiments are used to test other key metrics such as d-axis and q-axis inductances, stator resistance, and energy loss [20]. The measured parameters are kept in lookup tables that span the whole operating range at various current levels. The MTPA control technique may be done using precise parameters when combined with the feed-forward parameter iteration approach. As a result, it is a viable method for achieving accurate and efficient torque control [21].
Inductance and Flux levels are corrected by using the look-up table to enhance the control performance. A torque component current is also managed by the current depreciation table. To validate the field weakening, MTPA control as well as the reduced-order of the observer technique for hybrid electric vehicle commercial, the simulation results are shown [22]. As a result, it is a successful strategy for achieving precise and effective torque control. Models in MATLAB and SIMULINK were created to evaluate the suggested approach. Additionally, tests were done to validate the approach. The objective of this paper is to show the comparison results of IPMSM torque control in a series–parallel, series, hybrid electric vehicle for their torque and phase current values.
In this paper, the Matlab/Simulink software is analyzed and designed in different stages of variation in parameters. The paper is organized in the form of a section as follows in this paper. Section II describes an enhanced study of torque control techniques. Section III explains the Parameter Estimation and the block diagram representation of the IPMSM Torque Control in a Series–Parallel HEV, Series HEV, and the HEV P2 Reference Application. Section IV explains the Simulation analysis of the various HEV proposed system is explained in detail. Finally, Section V provides a conclusion and future work.
2 Torque control technique
2.1 Iterative feed forward parameters algorithm
To get the target current, several parameters are required. As previously noted, estimates may be made for the rotor orientation position and the coupling for the permanent magnetic flux. Offline experiments are used to determine stator resistance, energy loss, the d-axis as well as the q-axis inductances with other significant characteristics [23]. Lookup tables covering the entire real operating zone at various current levels are created using the measured experimental values. After obtaining the parameters based on the current input current, control techniques are used to compute the target current. As a result, the parameters are not a good fit for the desired current [24]. If the corresponding time interval varies from “0” to the highest level of torque, then the following equation could be employed to represent the largest change in the magnitude of the electro-magnetic torque within a controlling period \({T}_{emax}\) is \({T}_{respond}\):
In a control period, the following can be used to indicate the q-axis current's biggest value change:
In reality, the torque demand for the IPMSM used in automobiles fluctuates often, and the target current is computed based on the actual torque demand [25]. It is difficult to establish an equation for calculating the discrepancy between parameters and current. Starting with the current parameters (the d-axis and q-axis inductances, stator resistance, and energy loss), one set of d-axis and q-axis currents is acquired for a particular torque demand, which is estimated by control techniques (such as MTPA).
The acquired current is used to calculate a fresh set of motor parameters (through a parameter). With the revised values, a new set of d-axis and q-axis currents is computed. This iterative computation is repeated until the discrepancies between the new and old output currents reach a predefined minimal error [26]. The feed-forward parameter iteration technique is divided into five steps:
-
Using the parameter values, calculate the current motor parameters (the d- and q-axis inductances, stator resistance, and energy loss).
-
Using control techniques, calculate one set of d-axis and q-axis currents.
-
Using obtained parameter values, calculate the motor settings based on the current from step 2.
-
Using the new set of motor settings from step 3, calculate another set of d-axis and q-axis currents.
-
The iteration is complete if the current mistake is within the tolerance between the current and prior steps. Otherwise, proceed to step 2.
-
In addition, the targeted current is determined by the requirement of the absolute torque for the IPMSM used in automobiles, which fluctuates regularly [27]. It is very difficult to design an equation that would show how the current and the parameters differ from one another.
2.2 Control Method for maximum torque per ampere
The MTPA controlling approach method uses an algorithm for efficacy enhancement optimization that solely takes copper loss into account. The optimization algorithm’s goal is to achieve the least amount of loss of copper for a certain torque [28]. Finding the lowest stator current for such a given torque is crucial because the copper loss that follows is inversely proportional to the stator current squared. The following is how the MTPA control technique might be stated:
3 Estimating Different parameters
3.1 Analysis of interior permanent-magnet synchronous machine torque control in a series–parallel hybrid electric vehicle
The inverter is where IPMSM receives its input energy. The input energy may be described using the following notation by the rule of energy conservation:
\({E}_{loss}\) Can be represented as follows:
A comprehensive series–parallel HEV is depicted in this block diagram. The internal combustion engine (ICE) and an IPMSM power the vehicle's propulsion system. The high-voltage battery is refilled by the ICE's electric generator while it is moving. Using a fixed-ratio gear-reduction model, the automobile gearbox and differential are implemented. The subsystem is responsible for controlling the vehicle's torque and translates driver inputs into torque commands. Both a state machine and a state flow are used to accomplish the vehicle control approach. The ICE Controller subsystem manages the combustion engine’s torque. The electric generator’s torque is managed by the subsystem known as the Generator Controller. The drive controller subsystem regulates the IPMSM’s torque. You may view the output of the simulation by using the scopes in the Scopes subsystem. Figure 1 shows the block representation of the series–parallel HEV.

Schematic representation of series–parallel HEV
3.2 Analysis of the interior permanent-magnet synchronous machine torque control in a series hybrid electric vehicle
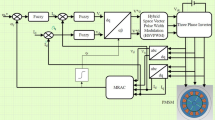
In this block diagram, Fig. 2 shows the simplified series hybrid electric car driven by an IPMSM torque control in a series HEV. The IPMSM is fed through a regulated three-phase converter by an ideal DC-DC converter that is coupled to a high-voltage battery. The high-voltage battery is charged by a generator powered by a combustion engine. A fixed-ratio gear-reduction paradigm is used in the implementation of the automobile gearbox and differential. The Vehicle Controller subsystem transforms the inputs from the driver into pertinent directives for the generator and IPMSM. The IPMSM's torque is under the control of the Drive Controller subsystem. There is a multi-rate PI-based control structure in the controller. While closed-loop current control operates more quickly, open-loop torque control operates more slowly. Both a State flow and a state machine are used in the job scheduling for the controller. Anyone may view the simulation results using the scopes included in the Scopes subsystem.

Schematic representation of series hybrid electric vehicle
Figures 2 illustrate that the minimum and maximum rotor position errors are both less than one electrical degree and less than five electrical degrees, respectively. The average speed-based estimating approach, however, has a maximum rotor position inaccuracy of around 10 electrical degrees. Additionally, the motor's output torque is consistently correct.
3.3 Hybrid electric vehicle P2 reference application
A complete HEV model, Fig. 3 shows including an internal combustion engine, gearbox, battery, motor, and related powertrain management algorithms, is represented by the HEV P2 reference application. Use the reference application to test an HEV P2 hybrid’s hardware-in-the-loop (HIL), analyze tradeoffs, and optimize control parameters.

Block diagram representation of HEV P2 reference
The regulating frequency of the PI current is reset to 20 kHz, while the PWM frequency is 10 kHz. The simulation disregards the power device’s dead time and voltage loss (The simplification is appropriate at this point since the dead time and voltage loss of the power device will be corrected in the real implementation). In the simulation, mechanical frictional loss and iron loss are also disregarded. As these parameters are only utilized to confirm the efficacy of the suggested strategy, just the fluctuating trends and not the precise reset values of these following parameters are required in the proposed simulation.
4 Analysis of the simulation and experimental results
4.1 Real-time driving cycle-federal test procedure (FTP)
The standard driving cycle such as FTP vehicle is analysed in the article for understanding and proofing our model to be utilized in this research analysis to show and highlight real performance requirements of the vehicle. The vehicle speed, components power in watts, Electric machine and its battery, Battery State of Charge (SoC). Depending on the cycle and load, the control approach should guarantee 15% SOC at a predetermined goal. The temporary SOC reduction, however, might be so great due to the dynamic nature of the motor power requirement that it might not be made up for by REX engagement. In a different scenario, REX start may be somewhat delayed owing to the nature of PI control, and SOC may go below 15%. This, however, happens quite near the objective range, thus the goal is still reachable. Simply put, it indicates that SOC will be just under 15% at the specified range as depicted in Fig. 4.

Component operating conditions of a hybrid electric vehicle on the Urban European drive cycle using dynamic programming
Vehicle speed, engine speed, and gearbox shifting numbers during the FTP cycle are shown in Fig. 5. The data show a respectable amount of shifting occurrences that is comparable to cars already in production. It is crucial to ensure that the shifting algorithm produces a drive quality that is acceptable (i.e., a manageable amount of shifting occurrences).

Conventional-car vehicle speed and engine power (first two hills of the FTP cycle)
The permitted speed range at the reference time is determined by the block using the time tolerance. The vehicle speed must remain within the reference speed range ± the velocity tolerance for the time period specified by the reference time ± the time tolerance, otherwise the block will create a fault situation. These diagrams show how the block calculates the acceptable speed range using the velocity and time tolerances as illustrated in Fig. 6.

Fault tolerance of the vehicle speed and velocity
The strategy operation for battery SOC(t) as a function of the distance travelled. The simulation output for the 180 mph velocity target range for the FTP-75 driving cycle has been chosen. It demonstrates that the vehicle can still achieve the target range even if SOC decreases below the process variable final target (15%) and at the same time travelled ranges are below the target value (in this case, less than 180 mph) as depicted in Fig. 7.

Battery SoC strategy operation
These distributions are more condensed and nearer the mean for FTP-75 and CLTC-P type. At any instance, the motor speed runs for less than 150 rpm which was considered a “soft limit” for reduced engagement timespan values. Range Extender never executes for less than 60 rpm motor speed at a particular time. The vehicle motor speed with a maximum of 150 rpm is illustrated in Fig. 8.

Vehicle motor speed when compared to the FTP with CLTC-P distribution
4.2 Result analysis of interior permanent-magnet synchronous machine torque control in a series–parallel hybrid electric vehicle
Models in MATLAB and SIMULINK were created to test the suggested approach. A 75-kW IPMSM for a novel energy vehicle application is used in this investigation. Table 1 shows the specification values of the IPMSM torque Control in a Series–Parallel HEV.
The PWM frequency has been set to 10–15 kHz, and the PI current regulating frequency has been set to 20–30 kHz. In the simulation, the power device's dead time and voltage drop are ignored (in the actual application, the power device's dead time and voltage drop are compensated, therefore the simplification is appropriate at this point). The simulation also disregards iron loss and mechanical frictional loss. To improve simulation accuracy, the stator resistance, as well as the d- and q-axis inductances, are measured offline. Only the fluctuating trends, not the precise values of these parameters, are required in the simulation, as they are only utilised to test the success of the approach that has been suggested. Figure 9 displays the simulation results under series parallel HEV. As demonstrated, the accurately calculated and measured characteristics allow the real electromagnetic torque to closely match the reference electromagnetic torque, leading to exact torque control. Thus, the simulation findings within any other circumstance (apart from the ‘0’ rated speed and ‘0’ rated torque control specific condition when the corresponding power, as well as the d–q axis voltages, are also both 0. Similarly support the viability of the suggested approach. Position of the rotor power estimator, as well as the flux linkage estimator, are thereby rendered inoperative).The phase currents with the amplitude of 410 A from 0.2 to 3 s are illustrated in Fig. 9.

Motor Torque and Phase current—series–parallel HEV
4.3 Result analysis of the interior permanent-magnet synchronous machine torque control in a series hybrid electric vehicle
Figure 10 demonstrates the simulation results under series hybrid electric vehicle. As demonstrated, the accurately calculated and measured characteristics allow the real electromagnetic torque to closely match the reference electromagnetic torque, leading to exact torque control. The phase currents with the amplitude of 310 A from 0.5 to 3 s are illustrated in Fig. 10. Table 2 shows the parameter specification of the series HEV.

Motor Torque and Phase current—Series HEV
The magnetic saturation is not as severe, and the current of the q-axis reduces while the current of the d-axis current increases when compared to the simulation findings. As a result, the evaluated magnetic flux linkage in the proposed method experiment is marginally higher than the outcome of the simulation.
4.4 Simulation result analysis of the hybrid electric vehicle P2 reference
The trace velocity, target and actual values are exactly matched and its produces zero error because the reluctance torque is higher during the maximum torque situations than it is under the other circumstances, the minimum current is required to produce a similar torque output. As a result, the torque control has a more effective impact.
The engine speed are compared with the motor speed, and the error is very less as illustrated in Fig. 11. The efficiency related to the torque and speed is attained to be more than 90% in the HEV and it is shown in the Fig. 11. Table 3 depicts the parameter specification of the HEV P2 reference application.

Performance analysis (i) Trace Velocity, Target, and Actual rating (ii) Engine speed Vs Motor Speed (iii) Engine Torque Vs Motor Torque
Figure 12 depicts the battery current, battery SoC and fuel economy. The battery current is 98 A in amplitude. As demonstrated, in the electric driving systems for motors, then the maximum efficiency can attain up to 0.94 near the rated amount of circumstances, effective control has been achieved.

Performance analysis (i) Battery Current (ii) Battery SoC (iii) US Fuel Economy MPGe (iv) Efficiency Vs Speed (v) Efficiency Vs Torque
Similarly support the viability of the suggested approach. Position of the rotor power estimator, as well as the flux linkage estimator, are thereby rendered inoperative). Thus, in the IPMSM Torque control in a series HEV, the magnetic saturation is not as severe, and the current of the q-axis reduces while the current of the d-axis current increases when compared to the simulation findings. As a result, the evaluated magnetic flux linkage in the proposed method experiment is marginally higher than the outcome of the simulation. Except for the flux linkage in the HEV P2 reference decreasing owing to the temperature increase. Because the reluctance torque is higher during the maximum torque situations than it is under the other circumstances, the minimum current is required to produce a similar torque output. As a result, the torque control has a more effective impact.
Table 4 shows the performance comparison of the proposed system and the conventional system. The suggested solution is straightforward and practical, and no further hardware modifications are required. It was modelled using the MATLAB/Simulink platform and implemented on a real time system of IPMSM drive system. The simulation findings demonstrate significant increases in estimating accuracy, confirming the efficacy of the suggested strategy. The efficiency of the proposed system calculated by the theoretical calculation. The output power for the proposed torque control in Series–Parallel HEV, Series HEV and HEV P2 Reference has high compared to the conventional methods. The torque ripple also reduced in the proposed method compared to conventional methods. The efficiency of the proposed has improved compared to the conventional methods.
5 Conclusion
In this paper, the research proposes a practical approach built on very low-resolution Hall-effect sensors to provide an IPMSM in electric vehicles with accurate and effective torque management. The maximum torque per ampere (MTPA), field weakening control, and reduced-order observer of IPMSM for HECV are all presented in this study. Electric vehicles can save money, weight, and volume by replacing resolvers with low-resolution Hall-effect sensors. Because the rotor position estimation is based on a power closed-loop, even if the predicted rotor position has some deficiencies, the IPMSM can output accurate torque. The flux linkage and power computations are dependent on rotor speed, the suggested technique may have certain limitations in the low-speed zone. However, this strategy is a considerably more effective way to establish efficient and precise management of IPMSM, especially when the IPMSM is functioning under high-power, high-speed settings. The standard driving cycle performance requirements of the modelled FTP vehicle has been analysed for understanding the real model requirements of the vehicle. Utilizing actual HEV load and modified engine characteristics, torque control is applied. The efficiency of the prosed system has been improved by 92%. It will serve as an effective IPMSM implementation and performance control to apply the suggested system to the HECV system to regulate it. The torque ripple also reduced in the proposed method.A funding declaration is mandatory for publication in this journal. Please confirm that this declaration is accurate, or provide an alternative.I confirm that the funding declaration provided is accurate.
Data availability
The data are available from the corresponding author upon request.
References
Zeng Q, Fang Y (2012) Structural synthesis and analysis of serial–parallel hybrid mechanisms with spatial multi-loop kinematic chains. Mech Mach Theory 49:198–215
Lei Yu, Zhang Y, Huang W (2017) Accurate and efficient torque control of an interior permanent magnet synchronous motor in electric vehicles based on Hall-effect sensors. Energies 10:410. https://doi.org/10.3390/en10030410
Lu D, Li J, Gu J (2012) Field-oriented control of permanent magnet brushless hub motor in an electric vehicle. Electr Mach Control pp. 11–14.
Kim SY, Choi C, Lee K, Lee W (2011) An improved rotor position estimation with the vector-tracking observer in pmsm drives with low-resolution hall-effect sensors. IEEE Trans Ind Electron 58:4078–4086
Dalala ZM, Cho Y, Lai JS (2013) Enhanced Vector Tracking Observer for Rotor Position Estimation for PMSM Drives with Low-Resolution Hall-Effect Position Sensors. In Proceedings of the 2013 IEEE International Electric Machines & Drives Conference (IEMDC), Chicago pp. 484–491.
Lidozzi A, Solero L, Crescimbini F, Napoli AD (2007) SVM PMSM drive with low-resolution Hall-effect sensors. IEEE Tran Power Electron 22:282–290
Batzel TD, Lee KY (2001) Slotless permanent magnet synchronous motor operation without a high-resolution rotor angle sensor. IEEE Tran Energy Convers 15:366–371
Xu B, Mu F, Shi G, Ji W, Zhu H (2016) State estimation of permanent magnet synchronous motor using improved square root UKF. Energies 9:489
Jung SY, Nam K (2011) Pmsm control based on edge-field hall sensor signals through anf-pll processing. IEEE Trans Ind Electron 58:5121–5129
Boileau T, Leboeuf N, Nahid-Mobarakeh B, Meibody-Tabar F (2011) Online identification of PMSM parameters: parameter identifiability and estimator comparative study. IEEE Trans Ind Appl 47:1944–1957
Asef P, Denai M, Marques BR, Paulides JJ, Lapthorn A (2021) Commutation Angle Maps Evaluation for Magnet Arrangements of Interior Permanent Magnet Synchronous Machines in Electric Vehicles. International Conference on Smart Energy Systems and Technologies (SEST). IEEE
Yang Z, Shang F, Brown IP, Krishnamurthy M (2015) Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Transactions on Transportation Electrification, IEEE.
Ramesh T, Pothuraju R, Kumar PD (2020) Torque Ripple Minimization of PMSM Drive using DTFC-SVM based Control Strategy for Five-Level Cascaded Symmetrical H-Bridge Inverter. IEEE.
Li M, He J, Demerdash NA (2014) A flux-weakening control approach for interior permanent magnet synchronous motors based on Z-source inverters. IEEE Transportation Electrification Conference and Expo (ITEC).
Dey T, Mukherjee K, Syam P. (2016) Dynamic adjustments of the D-Q axes reference voltage limits during flux weakening and MTPA control of an IPMSM drive for an EV application. 2nd International Conference on Control, Instrumentation, Energy & Communication (CIEC), IEEE
Singh R, Sengar KP, Mishra A, Thakur C (2016) A direct torque control of interior permanent magnet synchronous motor for an electric vehicle-design analysis total harmonic distortion of stator current. Int J Eng Res Technol 5(11):2278–3181
Elsherbiny H, Ahmed MK, Elwany M (2021) Comparative evaluation for torque control strategies of interior permanent magnet synchronous motor for electric vehicles. Period Polytech Elec Eng Comp Sci 65(3):244–261
Wei H, Jingzhen Yu, Zhang Y, Ai Q (2020) High-speed control strategy for permanent magnet synchronous machines in electric vehicles drive analysis of dynamic torque response and instantaneous current compensation. Energy Rep 6:2324–2335
Li M, He J, Demerdash NA (2014) A flux-weakening control approach for interior permanent magnet synchronous motors based on Z-source inverters. IEEE Transportation Electrification Conference and Expo (ITEC) https://doi.org/10.1109/ITEC.2014.6861776.
Ezemobi E, Yakhshilikova G, Ruzimov S, Castellanos LM, Tonoli A (2022) Adaptive model predictive control including battery thermal limitations for fuel consumption reduction in P2 hybrid electric vehicles. World Electr Veh J 13:33
Sabirin M, Ahmad F, Kamal A, Yamin M (2013) Modelling and torque tracking control of permanent magnet synchronous motor for hybrid electric vehicles. Int J Automot Mech Eng 7(1):2229–8649. https://doi.org/10.15282/ijame.7.2012.12.0077
Li Ya, Liu X, Liu Z (2018) Analysis and design of an interior permanent magnet synchronous machine with double-layer PMs for electric vehicles based on multi-physics fields. COMPEL 37(9):1–10. https://doi.org/10.1108/COMPEL-09-2016-0425
Bdewi MY, Mohammed AM, Ali ME (2021) Design and performance analysis of permanent magnet synchronous motor for electric vehicles application. Eng Technol J. https://doi.org/10.30684/etj.v39i3A.1765
Tian B et al (2022) Freewheeling current-based sensorless field-oriented control of five-phase permanent magnet synchronous motors under insulated gate bipolar transistor failures of a single phase. IEEE Trans Ind Electron 69(1):213–224. https://doi.org/10.1109/TIE.2021.3053891
Wu Y et al (2022) Hierarchical predictive control for electric vehicles with hybrid energy storage system under vehicle-following scenarios. Energy 251:123774. https://doi.org/10.1016/j.energy.2022.123774
Hong J, Wang Z, Chen W, Wang L, Lin P, Qu C (2021) Online accurate state of health estimation for battery systems on real-world electric vehicles with variable driving conditions considered. J Clean Prod 294:125814
Zhang G, Wenfei Yu, Hua W, Cao R, Qiu H, Guo A (2019) The design and optimization of an interior, permanent magnet synchronous machine applied in an electric traction vehicle requiring a low torque ripple. Appl Sci 9(17):3634. https://doi.org/10.3390/app9173634
Singh KV, Bansal HO, Singh D (2021) Fuzzy logic and Elman neural network tuned energy management strategies for a power-split HEVs. Energy 225:120–152
Lei Yu, Zhang Y, Huang W (2017) Accurate and efficient torque control of an interior permanent magnet synchronous motor in electric vehicles based on Hall-effect sensors. Energies 10(3):410. https://doi.org/10.3390/en10030410
Xiangyang Xu, Siqi Z, Peng D (2017) Engine-start control strategy of P2 parallel hybrid electric vehicle. IOP Conf Ser Mater Sci Eng. https://doi.org/10.1088/1757-899X/280/1/012029
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
SU: conceptualization; data curation; writing original draft; formal analysis; writing review; editing; conceptualization; writing review. PG: Project administration; resources; software; writing original draft; investigation. RP: supervision; validation; funding acquisition; writing review; editing and writing original draft. K: data curation; formal analysis; visualization; resources; software; investigation and methodology. YBJ: methodology; supervision; writing review and editing; funding acquisition.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Usha, S., Geetha, P., Palanisamy, R. et al. Analysis of torque controlling strategies of interior permanent magnet synchronous machine in hybrid electric vehicle. SN Appl. Sci. 5, 326 (2023). https://doi.org/10.1007/s42452-023-05563-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-023-05563-w