
Abstract
Based on the coupling res model of vehicular and road, the influences of surface layer modulus, surface layer thickness and equivalent modulus of elasticity on the spectrum of the acceleration, surface deflection under wheels, and surface strain at the distance of 0.4 m to 0.8 m away from wheels are analyzed. Results show that the fundamental frequency of the road pavement increases with the growth of surface layer modulus and equivalent modulus of elasticity, and decreases with the increase of surface layer thickness. Both surface deflections and surface strains decrease with the increase of equivalent modulus of elasticity as well as surface layer modulus and thickness. Moreover, when the equivalent modulus of elasticity is more than 2500 MPa and surface layer modulus is more than 4000 MPa, surface deflections and surface strains have a little variation with the enhance of the surface layer modulus and equivalent modulus of elasticity. The solution method of the spectrum of the acceleration and equivalent modulus of elasticity, surface deflection under wheels, surface strain at the distance of 0.4 m to 0.8 m away from wheels, and surface deflection based on surface strain are established. The load bearing capacity assessment method of the road pavement based on surface strain and the spectrum of the acceleration is provided. Finally, the feasibility and accuracy of this method is verified by comparing measured values in field testing. The method in this paper provides a theoretical support for the design, construction and maintenance of road engineering.
Article Highlights
-
The dynamic detection area of the road pavement is 0.4 m–0.8 m away from the wheel.
-
The solving methods of the spectrum of the acceleration are established to inverse the equivalent modulus of elasticity of the road pavement.
-
The relationship between surface deflection and surface strain is established to assess the load bearing capacity of the road pavement.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
As the most important infrastructure in traffic transportation, the health status of road directly affect the normal traffic of vehicular [1, 2]. The load bearing capacity is applied to reflected the health status of road by the calibration coefficient [3]. The calibration coefficient is defined as the ratio between the measured values in static load testing and the theory calculated values. When the calibration coefficient is more than 1, roads are seriously damaged and the load bearing capacity of roads would be insufficient. Otherwise, roads are safe and have enough load bearing capacity. The smaller the value of the calibration coefficient is, the safer the road structure would be. At present, the main instrument of load bearing capacity assessment includes benkleman beam deflectometer, automatic deflectometer, and falling weight deflectometer [4, 5]. Moreover, falling weight deflectometer has been used as an effective non-destructive testing device to assess the load bearing capacity of road because of automatic sampling and obtaining dynamic deflection [6]. However, falling weight deflectometer adopts impact load to replace dynamic vehicular load, and has a safety hazard with parking sampling [7].
To overcome the shortcomings of falling weight deflectometer, several organizations had developed new devices, such as traffic speed deflectometer and rolling wheel deflectometer. The traffic speed deflectometer and rolling wheel deflectometer could continuously measure pavement deflections at posted traffic speeds. Adam et al. [8] investigated the applicability of rolling wheel deflectometer in assessing the modulus and deflection of road structure based on field tests. Gedafa et al. [9] compared measured deflections from rolling wheel deflectometer and falling weight deflectometer, and found their values were statistically similar. Diefenderfer [10] found the vertical deflection between tires had a known limitation, and thought that the vertical deflection between tires might not fully represent characteristics of bound layers. Elseifi et al. [11] believed that calculating independent of pavement thickness and layer properties based on the field test of rolling wheel deflectometer measurements could be used as a screening tool to identify structurally deficient. Muller and Roberts [12] used measured surface deflection to make fitting curves and determine the deflected pavement profile. Katicha et al. [13] applied difference sequence method to separate traffic speed deflectometer measurement variability into noise variability and “true” structural variability, and used simulated examples to verify the effectiveness of difference sequence method to separate. Omar et al. [14] developed a model to predict pavement structural capacity and assess its effectiveness in identifying structurally deficient of pavement structure based on the rolling wheel deflectometer measurement data from 153 road sections. Nasimifar and Shojaee [15] evaluated the proprieties and limitations of common deflection algorithms in pavement structural performance prediction and back-calculation of pavement-layer modulus based on the measured traffic speed deflectometer slope data. Shresthal et al. [16] compared the data of surface and structural condition obtained from traffic speed deflectometer, and found that the data of surface condition was not necessarily a good indicator of the characteristic of structural condition. Stine and Niels [17] conducted experimental tests of 10 km highway using rolling wheel deflectometer and falling weight deflectometer to make a back-calculation of pavement parameters.
Because the field tests need a lot of manpower, material resources, financial resources, and have the limited data, numerical models play an important role to explain the pavement response with moving vehicular load. Garcia and Thompson [18] explicated that transverse tensile strains were more responsible for fatigue cracking than longitudinal strain. Ozer et al. [19] applied laboratory experiment, field testing, and numerical analysis to research the influence of bonding conditions on critical strains for hot-mix asphalt overlaid portland cement concrete pavements. Wang and Al-Qadi [20] and Al-Qadi et al. [21] studied the effect of vehicular load, speed, pavement structure, and temperature on modulus distribution based on the viscoelastic model of asphalt pavement structures. Wang and Li [22] compared pavement dynamic responses with falling weight deflectometer and moving vehicular, and explored the influence of vehicular speed and pavement depth on pulse durations of compressive stresses. Nega and Nikraz [23] established numerical models to analyze the tire-pavement contact stress distribution of asphalt concrete pavement response, and verified numerical models with experiment results. Liu et al. [24] analyzed pavement responses at different traffic speeds, tire loads, and bonding conditions based on numerical models. They selected several critical points of pavement structures to compare and discuss pavement mechanical responses induced by moving tire. Wang et al. [25] analyzed flexible pavement responses at different vehicle speeds and pavement roughness based on vehicle-tire-pavement interaction models. Zhao and Wang [26] applied convolutional integral method to simulate pavement responses under non-stationary loads with random amplitudes, and established three-dimensional finite element model to study tensile strains and frequency response of pavement structure.
However, on the one hand, falling weight deflectometer uses impact load to replace dynamic vehicular load, and has a safety hazard with parking sampling. The measured data from traffic speed deflectometer and rolling wheel deflectometer are affected by the fluctuation of the vehicular, and the methods of traffic speed deflectometer and rolling wheel deflectometer are in the test stage and need to be further verified. So the surface deflection at the position of the wheel is difficult to safely and reliably obtain to assess the load bearing capacity of the road under the condition of continuous traffic with the existing non-destructive testing methods. On the other hand, most studies pay attention to the deflection, strain, and stress of pavement dynamic response, and few research considerate the spectrum of the acceleration with dynamic vehicular load moving on pavement structure. Few studies make a relationship between dynamic response parameters and the load bearing capacity of road engineering. Therefore, a new load bearing capacity assessment method of road engineering based on the spectrum of the acceleration and surface strain is proposed under the condition of continuous traffic. First of all, the intelligent sensor is arranged in a position that does not affect vehicular normal passage and can reflect the spectrum of the acceleration and surface strain effectively. Then, numerical models of vehicular and road dynamic response are established to analyze the influence of surface layer modulus, surface layer thickness and equivalent modulus of elasticity on the spectrum of the acceleration, surface deflection and surface strain. The solving methods of the spectrum of the acceleration are established to inverse the equivalent modulus of elasticity. The relationship between surface deflection at the position of the wheel and surface strain at 0.4 m–0.8 m away from the wheel is established to obtain the measured values in dynamic load testing with the influence of the equivalent modulus of elasticity. The measured values in dynamic load testing are revised by the equation of dynamic load coefficient to obtain the measured values in static load testing. The measured values in static load testing are applied to assess the load bearing capacity of road engineering. Finally, the applicability and reliability of load bearing capacity assessment method of road engineering are verified by field tests.
2 Vehicular-road dynamic response model establishment and verification
2.1 Vehicular-road dynamic response model establishment
Because the actual vehicular load is dynamic load and affected by roughness, a vehicular model with seven degrees of freedom is established considering the influence of roughness, as shown in Eqs. (1)–(3) [27, 28]. The testing vehicular is modeled as a three-dimensional mass-spring-damper system, as shown in Table 1 and Fig. 1. The tandems at the drive and rear axles of the testing vehicular are lumped as single wheels for simplicity. Therefore, this model is consisted of five rigid masses that represents the vehicular and its four wheels. The vehicular is assigned three degrees of freedom corresponding to the vertical displacement, pitching rotation, and rolling rotation at the mass center. Each wheel is modeled as a lumped mass with only vertical displacement. Mass21 is a three-dimensional structural mass element with six degrees of freedom, which is used to simulate the suspension and non-suspension masses of the vehicular, and its inertial moments of pitch and tilt. Combin14 is a three-dimensional spring damping element, which is used to simulate the spring and damping of the vehicular. The implicit dynamic analysis is used to solve for the vehicular load in this study [21]. The time step is decided by the vehicular speed and element length, and the time increment in each step is selected to satisfy the time integration requirement for implicit dynamic analysis [20].
where P is the vertical contact stress. K and C are the suspension stiffness and damping. Z is the vertical displacements. Q is the pavement roughness. nk and n0 represent spatial frequency and benchmark spatial frequency (Hz s/m). Gx(nk) and Gx(n0) state power spectral densities of nk and n0 (10–6 m3). ɷ is the frequency index and equals to 2.

Vehicular model
The relationship between power spectral density and international roughness index (IRI) is defined as shown in Eq. (4).
where a0 is the coefficient and equals to 103 m−1.5.
By using D’Alembert’s principle, equations of motions for the vehicular are shown in Table 2.
Z0, Z1, Z2, Z3, Z4, Z5, Z6, Z7, and Z8 are the vertical displacements of the salient points of the testing vehicular. Furthermore, Z1 = Z0 + θx Ly + θy LHZ, Z2 = Z0 − θx Ly + θy LHZ, Z3 = Z0 + θx Ly − θy LHZ, Z4 = Z0 − θx Ly − θy LHZ, Q1 = Z1 − Z5, Q2 = Z2 − Z6, Q3 = Z3 − Z7, Q4 = Z4 − Z8 where θx and θy represent the pitching rotation. Finally, q9, q10, q11, and q12 represent the road roughness at each of the four wheels, respectively.
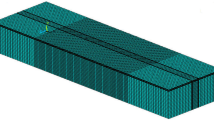
A road model with the length of 23 m (X direction), the width of 16 m (Z direction) and the depth of (9 + A) m (Y direction) is established comprehensively considering the influence range of vehicular load and the calculation accuracy and efficiency of road model [29, 30]. The bottom of road model is completely fixed, and the displacement in X and Z directions is only constrained in this direction. The full vehicular model of 30 T (Fig. 1) is used to obtain the random vehicular load at the speed of 17 m/s and the roughness of A-level (IRI is less than 4). And the random vehicular load is applied to move along the middle line of surface layer of the road structure model to establish the vehicular-road dynamic response model. The pavement structure layer parameters are shown in Table 3 and Fig. 2.

Road model
Based on displacement coupling method, different horizontal constraints are imposed on the vehicular model according to the moving speed of the vehicular. the vertical displacement coupling between the vehicular model and the road model is carried out by the uniformly distributed load on the contacting area. The contacting areas of front axle and rear axle are 0.16 m × 0.23 m and 0.32 m × 0.23 m, respectively. Finally, the dynamic response of the vehicular and road is analyzed.
2.2 Vehicular-road dynamic response model verification
In order to compare with the stress solution of Boussinesq theory, numerical models of road structure are applied with a circular uniformly distributed load at the radius of 0.3 m and the tire pressure of 0.7 MPa to solve the vertical stress at different depths of road structure [31]. The specific comparison results between Boussinesq theory and numerical models are shown in Table 4 and Fig. 3.

Stress nephogram of model
Table 4 and Fig. 3 show that the error between numerical stress solution and theoretical stress solution is less than 5%, which verifies the correctness of road model.
3 Determined road dynamic detection area
In order to ensure the safety of vehicular and test instrument and obtain the actual information of road dynamic response, the road dynamic detection area is determined by vehicular and road dynamic response models with the surface layer modulus of 2000 MPa, the surface layer thickness of 0.14 m, and the equivalent modulus of elasticity of 500 MPa, as shown in Fig. 4.

Surface deflection of the road
As shown in Fig. 4, the surface deflection is the largest at the wheel action position of vehicular load. the surface deflection gradually decreases with the detection position being away from the wheel. When the detection position is more than 0.8 m away from the wheel (The x-coordinate in Fig. 4 is less than 6.08 m), the surface deflection is less than − 0.028 mm. Therefore, in order to improve the signal-to-noise ratio and ensure testing accuracy, the farthest position of sensor is 0.8 m away from the wheel. Meanwhile, considering the influence of lateral deviation in the normal running process of vehicular, the closest position of sensor is selected to be 0.4 m away from the wheel. Finally, the dynamic detection area is 0.4 m–0.8 m away from the wheel.
4 Results analysis
The pavement roughness excites moving vehicular to produce the random vehicular load, the random vehicular load excites the forced vibration of the road, and the forced vibration of the road aggravates the turbulence of the vehicular. All the above-mentioned processes constitute a vehicular-road coupled vibration system. In the vehicular-road coupled vibration system, the dynamic characteristic of the vehicular is expressed by the main frequency of the random vehicular load, which is an independent variable related to pavement roughness, traffic speed, distance between the wheel axles and so on. The dynamic characteristic of the road is expressed by the fundamental frequency of the road, which is an independent variable related to the modulus and thickness of road structure layers.
The frequency studied in this paper refers to the fundamental frequency of the road. Therefore, it is necessary to analyze the influence of surface layer modulus, surface layer thickness, and equivalent modulus of elasticity on the fundamental frequency of the road. Ec and Et represent the surface layer modulus and equivalent modulus of elasticity, respectively. hc is the thickness of surface layer. f is the fundamental frequency of the road. s and ε are the surface deflection and surface strain.
4.1 The spectrum of the acceleration response
Because the dynamic response law of the fundamental frequency of the road is similar at different equivalent modulus of elasticity, the dynamic response figure of the fundamental frequency of the road with the equivalent modulus of elasticity of 1500 MPa is adopted to show the effect law of surface layer modulus and surface layer thickness on the fundamental frequency of the road, as shown in Fig. 5. The curve fitting formula in Fig. 5 is listed in Table 5. The fitting coefficient in Table 5 is listed in Table 6. The fitting coefficient in Table 6 is regressed. Finally, the solving method of the fundamental frequency of the road is obtained at the equivalent modulus of elasticity of 1500 MPa, as shown in Eqs. (5, 6, 7).

Relationship between the fundamental frequency of the road and surface layer modulus and thickness
As shown in Fig. 5, when the thickness of the surface layer is the same, the fundamental frequency of the road increases as its amplitude gradually decreases with increasing the modulus of the surface layer, which is similar to the study of Ulloa et al. [32] and Liu and Zhang [33]. When the modulus of the surface layer increases from 500 to 1000 MPa, the fundamental frequency of the road increases about 0.03 Hz. When the modulus of the surface layer increases from 1000 to 2000 MPa, the fundamental frequency of the road increases about 0.04 Hz. When the modulus of the surface layer increases from 2000 to 5000 MPa, the fundamental frequency of the road increases about 0.02 Hz / 1000 MPa. When the modulus of the surface layer increases from 5000 to 6000 MPa, the fundamental frequency of the road increases about 0.015 Hz. The increase amplitude of the fundamental frequency of the road gradually decreases with the increase of the modulus of the surface layer. When the modulus of the surface layer is constant, the fundamental frequency of the road decreases with increasing the thickness of the surface layer, which is similar to the study of Ulloa et al. [32] and Liu and Zhang [33]. When the thickness of the surface layer increases from 0.14 to 0.30 m, the fundamental frequency of the road decreases about 0.04 Hz at the modulus of the surface layer of 500 MPa, and 0.03 Hz at the modulus of the surface layer of 1000 MPa to 6000 MPa. This is because the fundamental frequency of the road is positively correlated with the modulus and negatively correlated with the mass. Moreover, the mass increases with the increase in the thickness of the surface layer when the other factors are constant. Therefore, the fundamental frequency of the road is affected by the modulus and thickness of the surface layer.p and q are coefficients
The inversion method of equivalent modulus of elasticity is obtained based on the solving method of the fundamental frequency of the road, as shown in Table 7.
4.2 Deflection response at the position of the wheel
The relationship between surface deflection and surface layer thickness and modulus is analyzed with the equivalent modulus of elasticity of 1500 MPa, as shown in Fig. 6.

Relationship between surface deflection and surface layer parameters
As shown in Fig. 6, when the thickness of the surface layer is constant, the surface deflection decreases with increasing the modulus of the surface layer, which is similar to the study of Elseifi et al. [11] and Katicha et al. [13]. When the modulus of the surface layer increases from 500 to 1000 MPa, the surface deflection decreases about 0.005 mm–0.0075 mm. When the modulus of the surface layer increases from 1000 to 2000 MPa, the surface deflection decreases about 0.0075 mm. When the modulus of the surface layer increases from 2000 to 5000 MPa, the surface deflection decreases about 0.005 mm/1000 MPa. When the modulus of the surface layer increases from 5000 to 6000 MPa, the surface deflection decreases about 0.0025 mm–0.005 mm. When the modulus of the surface layer is the same, the surface deflection decreases with increasing the thickness of the surface layer, which is similar to the study of Elseifi et al. [11] and Katicha et al. [13]. However, when the modulus of the surface layer is higher than 4000 MPa, the deflection in the surface is small, which shows that constantly increasing the modulus of the surface layer can not reduce surface deflection. This is because deflection is inversely proportional to the modulus and thickness, but the parameters of the surface layer are too large to remarkably reduce deflection.
The relationship between surface deflection and surface layer thickness and equivalent modulus of elasticity is analyzed with the surface layer modulus of 4000 MPa, as shown in Fig. 7.

Relationship between surface deflection and surface layer thickness and equivalent modulus of elasticity
As shown in Fig. 7, when the thickness of the surface layer is the same, the surface deflection decreases with the increase in the equivalent modulus of elasticity, which is similar to the study of Elseifi et al. [11] and Katicha et al. [13]. When the equivalent modulus of elasticity increases from 110 to 500 MPa, the surface deflection decreases about 0.07 mm–0.1 mm. When the equivalent modulus of elasticity increases from 500 to 1500 MPa, the surface deflection decreases about 0.05 mm–0.09 mm. When the equivalent modulus of elasticity increases from 1500 to 2500 MPa, the surface deflection decreases about 0.06 mm. When the equivalent modulus of elasticity increases from 2500 to 3500 MPa, the surface deflection decreases about 0.025 mm. When the equivalent modulus of elasticity is the same, the surface deflection decreases with the increase in the thickness of the surface layer. When the thickness of the surface layer increases from 0.14 to 0.30 m, the surface deflection decreases about 0.13 mm at the equivalent layer modulus of 110 MPa, 0.10 mm at the equivalent layer modulus of 500 MPa, and 0.06 mm at the equivalent layer modulus of 1500 MPa. However, when the equivalent modulus of elasticity is higher than 2500 MPa, the surface deflection varies slightly, which shows that simply increasing the equivalent modulus of elasticity can not reduce surface deflection.
About 343 groups vehicular and road dynamic response models are used to analyze the influence of surface layer thickness and modulus, and equivalent modulus of elasticity on surface deflection. Moreover, the solving method of surface deflection at the position of the wheel is established.
4.3 Strain response at different position of the wheel
The relationship between surface strain and surface layer thickness and modulus is analyzed with the equivalent modulus of elasticity of 1500 MPa, as shown in Fig. 8.

Relationship between surface strain and surface layer parameters
As shown in Fig. 8, when the thickness of the surface layer is the same, the surface strain decreases with the increase in the modulus of the surface layer, which is similar to the study of Al-Qadi et al. [21], Liu and Zhang [33], and Zhao and Wang [26]. When the modulus of the surface layer increases from 500 to 1000 MPa, the surface strain decreases about 0.003 × 103 με. When the modulus of the surface layer increases from 1000 to 2000 MPa, the surface strain decreases about 0.005 × 103 με. When the modulus of the surface layer increases from 2000 to 5000 MPa, the surface strain decreases about 0.0028 × 103 με / 1000 MPa. When the modulus of the surface layer increases from 5000 to 6000 MPa, the surface strain decreases about 0.00125 × 103 με. When the modulus of the surface layer is the same, the surface strain decreases with the increase in the thickness of the surface layer, which is similar to the study of Al-Qadi et al. [21], Liu and Zhang [33], and Zhao and Wang [26]. However, when the modulus of the surface layer is higher than 4000 MPa, the surface strain varies slightly, which shows that simply increasing the surface layer modulus can not reduce surface strain remarkably. This is because the strain has a negatively proportional relationship with the modulus and thickness, but the parameters of the surface layer are too large to remarkably reduce strain.
The relationship between surface strain and surface layer thickness and equivalent modulus of elasticity is analyzed with the surface layer modulus of 4000 MPa, as shown in Fig. 9.

Relationship between surface strain and surface layer thickness and equivalent modulus of elasticity
As shown in Fig. 9, when the thickness of the surface layer is the same, the surface strain decreases with an increase in the equivalent modulus of elasticity, which is similar to the study of Al-Qadi et al. [21], Liu and Zhang [33], and Zhao and Wang [26]. When the equivalent modulus of elasticity increases from 110 to 500 MPa, the surface strain decreases about 0.009 × 103 με–0.015 × 103 με. When the equivalent modulus of elasticity increases from 500 to 1500 MPa, the surface strain decreases about 0.0115 × 103 με. When the equivalent modulus of elasticity increases from 1500 to 2500 MPa, the surface strain decreases about 0.005 × 103 με. When the equivalent modulus of elasticity increases from 2500 to 3500 MPa, the surface strain decreases about 0.0035 × 103 με. The decrease amplitude of the surface strain gradually decreases with the increase of the equivalent modulus of elasticity. When the equivalent modulus of elasticity is the same, the surface strain decreases with an increase in the thickness of the surface layer. However, when the equivalent modulus of elasticity is higher than 2500 MPa, the surface strain varies slightly, which shows that simply increasing the equivalent modulus of elasticity can not reduce the surface strain.
About 343 groups vehicular and road dynamic response models are used to analyze the influence of surface layer thickness and modulus, and equivalent modulus of elasticity on surface strain. Moreover, the solving method of surface strain at different position of wheel is established.
The relationship between surface strain at 0.4 m away from the wheel and surface deflection at the position of the wheel is established, as shown in Table 8, Fig. 10 and Eq. (20).

a Relationship of A′. b Relationship of B′
Similarly, relationships between surface strain at 0.6 m and 0.8 m away from the wheel and surface deflection at the position of the wheel are established, as shown in Eqs. (21) and (22).
5 Field tests
5.1 Testing road description
The field test section is from South Third Ring Road to Gaoyi Market Road of National Highway 107 with the length of 38.229 km. The starting point is the pile number K301 + 900 of the South Third Ring Road, and the end point is the pile number K340 + 129 of Gaoyi Market Road. The road is classified as a first-class highway with four lanes in two directions and the width of 18.4 m–53 m. The field test is conducted from K309 + 620 to K310 + 620 with the width of 9.9 m. The old road structure includes 8 cm asphalt concrete pavement structure, 15 cm lime-fly-ash bound macadam, 26 cm limestone soil and subgrade. The new road structure includes 14 cm asphalt concrete pavement structure, 20 cm cement stabilized base layer, 15 cm lime-fly-ash bound macadam, 26 cm limestone soil and subgrade. The parameters of road structures are shown in Table 9. The equivalent modulus of elasticity at the top of base layer in the old road structure is obtained by the falling weight deflectometer test system. The modulus of surface layer and base layer are obtained by laboratory test. Poisson's ratio and density are obtained from the relative specification. The equivalent modulus of elasticity at the top of base layer in the new road structure is 1321 MPa obtained by the method of specification. The roughness is A-level (International roughness index is 3.12) obtained by the continuous roughness meter. Based on the definition of the load bearing capacity, the permissible surface deflection of the new road structure is 0.262 mm, which is the theory calculated values.
5.2 Testing instrument
Testing instruments include BDI-STS-WIFI structural testing system, acceleration sensor, strain sensor, wireless data transmission node, wireless data transmission base station, and benkleman beam deflectometer. The measurement range and accuracy of acceleration sensors are ± 2 g and 10–5 g, respectively. The measurement range and accuracy of strain sensors are ± 1500 με and ± 2%, respectively. The benkleman beam deflectometer is used to collect static surface deflections.
5.3 Testing plan and data processing
Three testing lines are distributed at 0.4 m, 0.6 m, and 0.8 m away from the wheel track line. Two sets of sensors are arranged at the distance of 30 m. Each set of sensors is composed of an acceleration sensor and an longitudinal strain sensor, as shown in Fig. 11. Wheel and pavement contacting area of front axle and rear axle are 0.16 m × 0.23 m and 0.32 m × 0.23 m, respectively. The testing vehicular of 30 T passes the test section at the speed of 17 m/s.

Sensor arrangement
Acceleration signals of K309 + 620-K310 + 020 and K310 + 020-K310 + 620 are shown in Fig. 12. the spectrum of the acceleration is obtained by fast fourier transform of acceleration signal, as shown in Fig. 13.

a Acceleration signal at the pile number of K309 + 620-K310 + 020. b Acceleration signal at the pile number of K310 + 020-K310 + 620

(a) The spectrum of the acceleration at the pile number of K309 + 620-K310 + 020. (b) The spectrum of the acceleration at the pile number of K310 + 020-K310 + 620
The measured values of the spectrum of the acceleration at the pile number of K309 + 620-K310 + 020 and K310 + 020-K310 + 620 are compared with the calculated fundamental frequency of the road in Eqs. (5, 6, 7). The equivalent modulus of elasticity at the top of base layer inverted from Table 7 is compared with that of field tests, as shown in Table 10.
As shown in Table 10, errors between the measured value of the spectrum of the acceleration and the calculated value of the fundamental frequency of the road at the pile number of K309 + 620-K310 + 020 and K310 + 020-K310 + 620 are 1.09% and 1.89%, respectively. Errors of equivalent modulus of elasticity at the pile number of K309 + 620-K310 + 020 and K310 + 020-K310 + 620 are 4.98% and 0.25%, respectively. Errors between the measured value of the spectrum of the acceleration and the calculated value of the fundamental frequency of the road are less than 5%, and errors of equivalent modulus of elasticity are also less than 5%, which can meet the requirement of road engineering.
Strain signals at different position of the wheel are shown in Fig. 14 with the pile number of K309 + 620-K310 + 020 and K310 + 020-K310 + 620.

a Surface strain at the pile number of K309 + 620-K310 + 020. b Surface strain at the pile number of K310 + 020-K310 + 620
Based on the definition of the load bearing capacity, the measured values in static load testing are obtained by two ways, including dynamic load testing and static load testing. (1) dynamic load testing: The mean value of measured surface strain in Fig. 14 and the equivalent modulus of elasticity in Table 10 are taken into Eqs. (20), (21), and (22) to solve surface deflections at the position of the wheel. Values from Eqs. (20), (21), and (22) are revised to the measured values in static load testing by dynamic load coefficient (Eq. (23)). (2) static load testing: The measured values in static load testing are obtained by the benkleman beam deflectometer. The revised surface deflection is compared with the measured surface deflection, as shown in Table 11.
The dynamic load coefficient is obtained by Eq. (23).
where D is the dynamic load coefficient. c0 is the coefficient and equals to 10–3 m−0.5 s0.5. v is the speed.
As shown in Table 11, the error of revised surface deflection and measured surface deflection is less than 6.99% at the pile number of K309 + 620-K310 + 020 and K310 + 020-K310 + 620. Because the calibration coefficient is defined as the ratio between the measured values in static load testing and the theory calculated values, the calibration coefficients at the pile number of K309 + 620-K310 + 020 and K310 + 020-K310 + 620 are both less than 1.0, which shows that the load bearing capacity of road at two testing sections are both excellent.
6 Discussion
The load bearing capacity is reflected by the calibration coefficient, which is defined as the ratio between the measured values in static load testing and the theory calculated values [3]. However, the existing method of static load testing needs to block the traffic, and the existing method of dynamic load testing is difficult to obtain the measured values in static load testing under the condition of continuous traffic with the non-destructive testing methods. Moreover, the non-destructive testing methods have a safety hazard with parking sampling and are affected by the fluctuation of the vehicular, which needs to be further verified the reliability of the measured data [7, 9, 16]. Therefore, this study provides a new load bearing capacity assessment method based on the spectrum of the acceleration and surface strain under the condition of continuous traffic. Firstly, the dynamic detection area is determined as 0.4 m–0.8 m away from the wheel based on the vehicular-road dynamic response model. Secondly, a number of numerical models are used to analyze the influence of modulus and thickness of the surface layer as well as the equivalent modulus of elasticity on the fundamental frequency of the road, surface deflection, and surface strain. Results show that the fundamental frequency of the road increases with the growth of surface layer modulus and equivalent modulus of elasticity, and decreases with the increase of surface layer thickness, which is similar to the study of Ulloa et al. [32] and Liu and Zhang [33]. Both surface deflection and surface strain decrease with the increase of equivalent modulus of elasticity and surface layer modulus and thickness, which is similar to the study of Elseifi et al. [11], Katicha et al. [13], Al-Qadi et al. [21], Liu and Zhang [33], and Zhao and Wang [26]. However, when the equivalent modulus of elasticity is more than 2500 MPa and surface layer modulus is more than 4000 MPa, surface deflections and surface strains have a little variation with the enhance of the surface layer modulus and equivalent modulus of elasticity. Thirdly, the equivalent modulus of elasticity is difficult to directly obtain by the non-destructive testing methods, but the fundamental frequency of the road structure can express the dynamic characteristic of the road and be obtained by the spectrum of the acceleration directly. Hence, the solving method of the fundamental frequency of the road structure is established to inverse the equivalent modulus of elasticity with the influence of surface layer modulus and thickness, which is applied to obtain the surface deflection and surface strain. Because the surface deflection at the position of the wheel cannot directly obtain for the normal road, the relationship between surface deflection at the position of the wheel and surface strain at 0.4 m–0.8 m away from the wheel is established with the effect of the equivalent modulus of elasticity. Based on the definition of the load bearing capacity of the road pavement, the measured values in the dynamic load testing are obtained as follows: The mean value of measured surface strain at 0.4 m–0.8 m away from the wheel and the equivalent modulus of elasticity reversed by the fundamental frequency of the road structure are taken into equations to solve surface deflections at the position of the wheel. Values of surface deflections at the position of the wheel from the dynamic load testing are revised to the measured values in static load testing by dynamic load coefficient. The ratio between the measured values in static load testing and the theory calculated values is applied to calculate the calibration coefficient to assess the load bearing capacity of the road pavement, which shows the service performance of the road structures. Fourthly, the applicability and reliability of load bearing capacity assessment method of the road pavement are verified by field tests. The study proposes a method to assess the load bearing capacity of road engineering based on surface strain and the spectrum of the acceleration under normal traffic conditions, which provides a theoretical support for road testing and maintenance.
7 Conclusion
This study develops dynamic response models of the vehicular and the road to analyze the influence of the modulus and thickness of the surface layer as well as the equivalent modulus of elasticity on the spectrum of the acceleration, surface deflection, and surface strain. The results can be explained as follows:
-
(1)
The fundamental frequency of the road is positively correlated with the modulus and negatively correlated with the mass, and the mass increases with the increase in the thickness of the surface layer when the other factors are constant. Hence, the fundamental frequency of the road increases with the growth of surface layer modulus and equivalent modulus of elasticity, and decreases with the increase of surface layer thickness.
-
(2)
The increase of surface layer modulus and thickness as well as equivalent modulus of elasticity is beneficial to reduce surface deflections and surface strains, but blindly increasing the surface layer modulus and thickness as well as equivalent modulus of elasticity has little effect on the responses of surface deflections and surface strains. The reason is that when the equivalent modulus of elasticity is more than 2500 MPa and surface layer modulus is more than 4000 MPa, surface deflections and surface strains have a little variation with the enhance of the surface layer modulus and equivalent modulus of elasticity.
-
(3)
(3) Numerous results of vehicular and road dynamic response models are applied to establish the solving method of the fundamental frequency of the road, surface deflection, and surface strain. The solving methods of the fundamental frequency of the road are established to inverse the equivalent modulus of elasticity. The relationship between surface deflection at the position of the wheel and surface strain at 0.4 m–0.8 m away from the wheel is established to obtain the measured values in dynamic load testing with the influence of the equivalent modulus of elasticity. The measured values in dynamic load testing are revised by the equation of dynamic load coefficient to obtain the measured values in static load testing. The measured values in static load testing are applied to assess the load bearing capacity of the road.
-
(4)
(4) The load bearing capacity assessment method is proposed based on vehicular and road dynamic response models, and verified by field tests, which provides the reference for the design, construction and maintenance of road engineering. Due to limited time and energy, this study has only considered the speed of 17 m/s and the vehicular load of 30 T. Future research will analyze the different speed and vehicular load, and establish the load bearing capacity assessment method under different vehicular condition.
Data availability
All data included in this study are available upon request by contact with the corresponding author.
References
Marecos V, Fontul S, Antunes MDL et al (2017) Evaluation of a highway pavement using non-destructive tests: falling weight deflectometer and ground penetrating radar. Constr Build Mater 154(4):1164–1172. https://doi.org/10.1016/j.conbuildmat.2017.07.034
Ren D, Song H, Huang C et al (2020) Comparative evaluation of asphalt pavement dynamic response with different bases under moving vehicular loading. J Test Eval 48(3):1823–1836. https://doi.org/10.1520/JTE20190299
Li M, Wang H (2017) Development of ANN-GA program for backcalculation of pavement moduli under FWD testing with viscoelastic and nonlinear parameters. Int J Pavement Eng 20(4):490–498. https://doi.org/10.1080/10298436.2017.1309197
Guzzarlapudi SD, Adigopula VK, Kumar R (2016) Comparative studies of lightweight deflectometer and Benkelman beam deflectometer in low volume roads. J Traffic Transp Eng 3(5):438–447. https://doi.org/10.1016/j.jtte.2016.09.005
Deep P, Andersen MB, Rasmussen S et al (2020) Evaluation of Load transfer in rigid pavements by rolling wheel deflectometer and falling weight deflectometer. Transp Res Procedia 45(3):376–383. https://doi.org/10.1016/j.trpro.2020.03.029
Li M, Wang H, Xu G et al (2017) Finite element modeling and parametric analysis of viscoelastic and nonlinear pavement responses under dynamic FWD loading. Constr Build Mater 141(15):23–35. https://doi.org/10.1016/j.conbuildmat.2017.02.096
Ainalem N, Hamid N, Al-Qadi IL (2016) Dynamic analysis of falling weight deflectometer. J Traffic Transp Eng (English Ed) 3(5):427–437. https://doi.org/10.1016/j.jtte.2016.09.010
Zofka A, Sudyka J et al (2018) Alternative approach for interpreting traffic speed deflectometer results. Transp Res Rec 2457(1):12–18. https://doi.org/10.3141/2457-02
Gedafa DS, Hossain M, Miller R et al (2010) Network level testing for pavement structural evaluation using a rolling wheel deflectometer. J Test Eval 38(4):439–448
Diefenderfer BK (2010) Investigation of the rolling wheel deflectometer as a network-level pavement structural evaluation tool. Falling Weight Deflectometers. https://doi.org/10.1006/biol.1999.0214
Elseifi MA, Abdel-Khalek AM, Gaspard K et al (2012) Evaluation of continuous deflection testing using the rolling wheel deflectometer in Louisiana. J Transp Eng 138(4):414–422. https://doi.org/10.1061/(ASCE)TE.1943-5436.0000349
Muller WB, Roberts J (2013) Revised approach to assessing traffic speed deflectometer data and field validation of deflection bowl predictions. Int J Pavement Eng 14(3–4):388–402. https://doi.org/10.1080/10298436.2012.715646
Katicha SW, Bryce J, Flintsch G et al (2015) Estimating “true” variability of traffic speed deflectometer deflection slope measurements. J Transp Eng 141(1):04014071.1-04014071.8. https://doi.org/10.1061/(ASCE)TE.1943-5436.0000711
Omar E, Mostafa AE, Kevin G et al (2016) Prediction of in-service pavement structural capacity based on traffic speed deflection measurements. J Transp Eng 142(11):04016058. https://doi.org/10.1061/(ASCE)TE.1943-5436.0000891
Nasimifar M, Shojaee M (2022) Evaluation of vehicle speed effect on continuous pavement surface deflection measurements. Int J Pavement Res Technol 15(1):184–195. https://doi.org/10.1007/s42947-021-00017-1
Shrestha S, Katicha SW, Flintsch GW (2019) Pavement condition data from traffic speed deflectometer for network level pavement. Airfield Highway Pavements 12(3):392–403. https://doi.org/10.1061/9780784482452.039
Stine SM, Niels LP (2019) Backcalculation of raptor (RWD) measurements and forward prediction of FWD deflections compared with FWD measurements. Airfield Highway Pavements 32(6):382–391. https://doi.org/10.1061/9780784482452.038
Garcia G, Thompson M (2008) Strain and pulse duration considerations for extended-life hot-mix asphalt pavement design. Transp Res Rec. https://doi.org/10.3141/2087-01
Ozer H, Al-Qadi IL, Wang H et al (2012) Characterisation of interface bonding between hot-mix asphalt overlay and concrete pavements: modelling and in-situ response to accelerated loading. Int J Pavement Eng 13(2):181–196. https://doi.org/10.1080/10298436.2011.596935
Wang H, Al-Qadi IL (2013) Importance of nonlinear anisotropic modeling of granular base for predicting maximum viscoelastic pavement responses under moving vehicular loading. J Eng Mech 139:29–38. https://doi.org/10.1061/(ASCE)EM.1943-7889.0000465
Al-Qadi IL, Wang H, Tutumluer E (2010) Dynamic analysis of thin asphalt pavements by using cross-anisotropic stress-dependent properties for granular layer. Transp Res Rec. https://doi.org/10.3141/2154-16
Wang H, Li M (2016) Comparative study of asphalt pavement responses under FWD and moving vehicular loading. J Transp Eng 142(12):169–189. https://doi.org/10.1061/(ASCE)TE.1943-5436.0000902
Nega A, Nikraz H (2017) Evaluation of tire-pavement contact stress distribution of pavement response and some effects on the flexible pavements. In: International conference on highway pavements and airfield technology, vol 227, pp 174–185. https://www.researchgate.net/publication/319277243
Liu P, Zhao Q, Yang H et al (2019) Numerical study on influence of piezoelectric energy harvester on asphalt pavement structural responses. J Mater Civ Eng 31(3):04019008.1-04019008.12. https://doi.org/10.1061/(ASCE)MT.1943-5533.0002640
Wang H, Zhao J, Hu X et al (2020) Flexible pavement response analysis under dynamic loading at different vehicle speeds and pavement surface roughness conditions. J Transp Eng 146(3):04020040. https://doi.org/10.1061/JPEODX.0000198
Zhao JN, Wang H (2020) Dynamic pavement response analysis under moving truck loads with random amplitudes. J Transp Eng Part B Pavements 146(2):04020020. https://doi.org/10.1061/JPEODX.0000173
Ou CB (2005) Dynamic response analysis of asphalt pavement structure. Zhejiang University, Hangzhou
Wang YD (2014) Research on the bridge mechanics performance under the standard energy impact load. Civil Aviation University of China, Tianjin
Liang HT (2013) Analysis of time-history responses of layered asphalt pavement structure under moving load. Central South University, Hunan
Huang QL, Ling JM (2011) Methodology study on defining subgrade’s working area. J Tongji Univ (Nat Sci) 39(4):551–555. https://doi.org/10.4028/www.scientific.net/AMR.211-212.106
Lv PM, Dong ZH (2010) Mechanical analysis of vehicle-asphalt pavement system. China Communications Press, Beijing
Ullloa A, Hajj EY, Siddharthan RV et al (2013) Equivalent loading frequencies for dynamic analysis of asphalt pavements. J Mater Civ Eng 25(9):1162–1170. https://doi.org/10.1061/(ASCE)MT.1943-5533.0000662
Liu XL, Zhang XM (2019) Asphalt pavement dynamic response under different vehicular speed and pavement roughness. Road Mater Pavement Des 12(6):1–22. https://doi.org/10.1080/14680629.2019.1686053
Funding
The authors gratefully acknowledge the Nation Natural Science Foundation of China (No. 52108333) and Key R & D programmes in Xingtai (2021ZC014) for providing the funding that made this study possible.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liu, X., Zhang, X. A new load bearing capacity assessment method of the road pavement based on surface strain and the spectrum of the acceleration. SN Appl. Sci. 5, 169 (2023). https://doi.org/10.1007/s42452-023-05383-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-023-05383-y