
Abstract
In this study, based on four common float shapes, the factors affecting the energy-capturing characteristics of floats are determined using mathematical models of floats moving in waves. By using the orthogonal experimental method and AQWA hydrodynamics simulations, the influence degrees of different factors on the float capture width ratio were determined through the range analysis. Based on the frequency-domain conditions, the variation trends in the float energy-capturing characteristics are summarized, and the relationships between the float energy-capturing characteristics and the resonance frequency and wave force are discussed. It was concluded that the energy-capturing characteristics of slender cylindrical floats were better at the resonance frequency, and the wave force acting on the float is not the most powerful basis to judge the energy-capturing characteristics of the float. This study’s conclusions provide some reference for the design and optimization of floats.
Graphical abstract
In this study, the energy-capturing characteristics of floats in a point absorption wave energy generator under the action of multiple factors are studied. At a higher draft depth, a “slender” float shape had a larger capture width ratio. The wave force received by the float could not be the basis for determining the float energy-capturing characteristics.

Article Highlights
-
1.
The influence degree of each factor on the capture width ratio of the float is in the descending order as follows: Float shape > Float draft depth > Maximum float radius.
-
2.
The optimum energy-capturing frequency of the float is not necessarily the resonance frequency but is affected by the added mass, radiation damping and wave force.
-
3.
The wave force acting on the float is not the most powerful basis to judge the energy-capturing characteristics of the float.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Wave energy, as a clean energy with a large reserve [1], is used worldwide, and its energy density increases significantly during autumn and winter [2,3,4]. Among the various types of wave energy generation devices, point absorption wave energy generators, which are wave energy conversion devices with a better comprehensive performance than other wave energy conversion devices, have attracted the attention of many scholars [5,6,7]. As the energy-capturing device of a point absorption wave energy generator, the float is directly stimulated by the wave and converts the wave energy into kinetic energy, which is the first-order energy conversion for the entire power-generation system. Therefore, researching and developing a wave energy conversion device is a necessary step when studying the energy-capturing characteristics of floats in order to achieve the maximum energy gain [8].
Scholars have conducted many research studies on the influencing factors of float energy capture characteristics. Liu [9], McCabe [10], Garcia-Teruel [11] and Dong [12] used finite element simulation analysis or algorithm optimization to analyze the influence of different float shapes on the float energy-capturing characteristics. Gao studied the wave absorption efficiencies and output powers of floats with different masses operating under the same conditions [13]. Based on these trends, Fang designed and proposed a quality-adjustable float to adapt to different sea conditions [14]. Marten Hollm studied the energy-capturing characteristics of floats with different tilt states [15]. Ma analyzed the influences of the float shape, the maximum width, and the centroid position on the hydrodynamic performance of a float to be used in a wave energy conversion device operating in the harsh environment of the South China Sea [16]. Gao [17], Zheng [18] and Huang [19] discussed the influence of the wave incidence angle and the float draft depth on the wave force using a cylindrical float model in a specific environment. Stansby found that different draft depths lead to different resonance frequencies [20]. Cai proposed the active resonance wave energy conversion technology using the concept of resonance in a wave energy system and optimized the float body according to the linearized vibration mode of the wave energy system [21]. The experimental verification showed that the conversion efficiency of the wave energy conversion device could be greatly improved using this method. Luan found that the power take-off (PTO) damping of the float can affect the motion response of the float, which in turn affects the resonant frequency of the float [22]. However, Alper Burgac studied the effect of the ratio of PTO damping and radiation damping on the energy-capturing characteristics of the float [23]. However, Zhi proposed a PTO damping control method and conducted a coupling study using floats with different bottom shapes to explore the variations in the energy-capturing characteristics of floats [24].
Many factors affecting the energy-capturing characteristics of floats have been analyzed by scholars. However, there are few studies that simultaneously investigated the resonance performance and the capture width ratio of a float, and changes in the energy-capturing characteristics of floats under the influence of multiple factors were seldom considered. In this study, four common types of floats (conical, frustum, spherical, and cylindrical) were selected. The factors affecting the energy-capturing characteristics of the floats were analyzed according to the mathematical model for float movement on a wave surface. Based on this analysis, an orthogonal level table was constructed, and orthogonal experiments were conducted using hydrodynamic simulation analysis tools, such as AQWA, to calculate the degree of influence each factor had on the energy-capturing characteristics of the floats [25]. Based on the frequency domain, the variation trends in the energy-capturing characteristics of the floats when influenced by multiple factors were summarized. The conclusions obtained from this study can provide a reference for the design and optimization of floats and further research into wave energy devices.
In Sect. 2, we derive the factors influencing the energy-capturing characteristics of a float based on a mathematical model of its motion in waves. In Sect. 3, we use AQWA to perform hydrodynamic simulation and orthogonal tests on four common floats. The results are discussed in Sect. 4. In Sect. 5, we present the conclusions of this study.
2 A mathematical model for float motion in waves
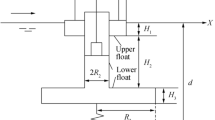
The motion of a float in a wave is shown in Fig. 1. The force exerted by the waves on the float was divided into a wave force, a hydrostatic restoring force, and a radiation force:
In Eq. (1), Fv is the wave force (N), which is composed of the Froude-Krylov (F-K) and diffraction forces: \(F_{{\text{v}}} = F_{{{\text{F}} - {\text{K}}}} + F_{{\text{d}}}\). The calculation is based on the F–K assumption method, which assumes that the space occupied by the float is filled with fluid, this generates acceleration due to wave propagation. Then, there must be a pressure field around the fluid that is similar to the pressure field around the float. The wave force acting on the float can be calculated by integrating the pressure on the wet surface of the float. \(F_{{\text{s}}}\) is the hydrostatic restoring force (N), \(F_{{\text{s}}} = - \rho gA_{{{\text{wp}}}} x\), which represents the different forces exerted by the water on the float when it rises and falls in the water for different distances in order to return to its equilibrium position. \(\rho\) is the density of seawater (kg/m3). g is the acceleration due to gravity (N/kg). x is the distance between the float and its equilibrium position (m). \(A_{{{\text{wp}}}}\) is the cross-sectional area of the float on the water surface (\({\text{m}}^{{2}}\)). If the float is cylindrical with a radius r, then \(F_{{\text{s}}} = - \rho g\pi r^{2} x\). \(F_{{\text{c}}}\) is the radiation force (N), \(F_{{\text{c}}} = - i\omega xP_{{\text{c}}}\). \(\omega\) is the circular wave frequency (rad/s). \(P_{{\text{c}}}\) is the damping coefficient. \(m_{1}\) is the mass of the float (kg). \(m_{{\text{a}}}\) is the additional mass of the float (kg), which represents the mass of water excited by the float during its reciprocating motion. The additional masses of differently shaped floats are different. a is the acceleration of the float (N/kg).

The motion of a float in a wave
The radiation force exerted by the wave on the float was assumed to be equivalent to the damping force of a damper, and the hydrostatic restoring force of the sea water was set equivalent to the elastic force of a spring. The motion of the float in the wave was then equivalent to a second-order damped forced vibration, with an equation of motion expressed as follows:
In Eq. (2), c represents the equivalent damping coefficient. Then, the natural vibration frequency could be expressed as follows:
The mass of the float, m1, could be expressed by its draft depth h:
In Eq. (4), \(T^{\prime}\) is the natural period of the float (s), and \(\kappa = m_{\text{a}}/m_{1}.\)
According to Yin [26], the wave force can be calculated as follows:
Equation (6) expresses the average output power of the float:
K from Eq. (6) is defined as follows:
The input wave power within the width of the float could be calculated as follows:
In Eq. (8), L represents the depth of the water where the float is located (m), k is the wave number (m−1), A is the wave height (m), and B is the width of the float (m).
The float capture width ratio, which is the ratio of its average output power to the input wave power within the float width, is an important indicator of a float’s ability to absorb wave energy:
The response amplitude operator (RAO) concept is also introduced here, and it is defined as the ratio between the displacement amplitude of the float and the amplitude of an incident wave. This value represents the motion of the float. A large RAO value represents intense float motion, indicating a situation that is conducive to the absorption of energy.
Based on the float motion analysis presented above, Eqs. (6), (7), and (8) indicate that the float shape and the maximum radius of the float affect the additional mass and the radiation damping, thus affecting the capture width ratio of the float. Meanwhile, Eq. (4) shows that changes in the draft depth and the additional mass of the float also cause changes in the float resonance frequency.
3 Orthogonal test for energy-capturing characteristics of floats
According to the mathematical model for float motion in waves, the float shape, the maximum float radius, and the float draft depth affect the capture width ratio, the amplitude response operator, and the resonance frequency of the float. Therefore, the orthogonal test principle could be used to solve this multi-factor problem.
To study the influence of the factors mentioned above on the hydrodynamic performance of a float, the same float height should be used because of the control variables principle. Four common float shapes were initially selected in this study: conical, frustum, spherical, and cylindrical. The height of each float type, H, was constrained to 1.8 m, the bottom radius of the frustum float, r2, was greater than or equal to 0.1 m, the semi-apex angle, θ, of the frustum was 30°. The specific float configurations are shown in Fig. 2.

Float model shapes: a conical, b frustum, c spherical, and d cylindrical
The range of the float maximum radius, r1, was selected to be 0.8–1.4 m, which was divided into four levels at 0.2 m intervals. The range of the float draft depth, h, was selected to be 0.6–1.5 m, which was divided into four levels with 0.3 m intervals. Table 1 presents specific information regarding the factors and levels. After determining the factors and levels, a horizontal orthogonal table, \(L_{16} (4^{3} ),\) with three factors and four levels was constructed using the software SPSSUA. The float capture width ratio, the float resonant frequency point, and the float amplitude response operator were selected as the optimization objects. AQWA simulation analyses were used to insert the corresponding simulation results into the horizontal orthogonal table, as shown in Table 2. To facilitate the presentation of the results, factor A represented the float shape, factor B represented the maximum float radius, and factor C represented the float draft depth.
Range analysis was conducted based on the data in Table 2. The range of a factor, R, reflected the variation range of the experimental target value when the factor level changed. An increase in the range of a factor indicated that, compared with other factors, the influence of this factor on the experimental target value is greater. The calculation method used for this analysis was relatively simple. For example, AI is the mean value of all experimental target values when the A-factor (float shape) was at level 1 (conical float):
In Eq. (10), Ai represents the A-factor at level i, Bi represents the B-factor at level i, and Ci represents the C-factor at level i.
The changing trend of the mean experimental target values for each factor at different levels reflected the changing trend of the experimental target values as the level changed under the action of a certain factor.
The range of a factor is the difference between the maximum and minimum mean values of all the experimental objective values for this factor at all the levels. Taking factor A (float shape) as an example, the range of this factor is expressed as follows:
In Eq. (11), Aj and Aq are the mean values of all the experimental target values for factor A (float shape) at levels j and q, respectively.
The results of these calculations are listed in Tables 3, 4 and 5, where the test target in Table 3 is the float capture width ratio, the test target in Table 4 is the float resonance frequency, and the test target in Table 5 is the float amplitude response operator.
For example, R1A represents the A-factor range affecting the float capture width ratio, R2A represents the A-factor range affecting the float resonance frequency, and R3A represents the A-factor range affecting the float amplitude response operator. The range analysis results in Tables 3, 4 and 5 show that for the float capture width ratio, R1A > R1B > R1C, for the float resonance frequency, R2A > R2C > R2B, and for the float amplitude response operator, R3A > R3B > R3C. Comparisons of the mean experimental target values for all factors at different levels are presented next. For the float capture width ratio, AI < AII < AIII < AIV, BIV < BIII < BII < BI and CII < CI < CIII < CIV. For the float resonance frequency, AIV < AIII < AII < AI, BIV < BIII < BII < BI and CIV < CIII < CII < CI. For the float amplitude response operator, AI < A < AII < AV, BIV < BIII < BII < BI and CI < CII < CIII < CIV.
Table 3 and 5 show that, among the factors affecting the float capture width ratio and the float amplitude response operator, A (float shape) was the primary factor, B (maximum float radius) was the secondary factor, and C (float draft depth) had the least influence. The capture width ratio and the float amplitude response operator increased as the float shape changed from conical, frustum, and spherical to cylindrical. When the maximum radius of the float was larger, the capture width ratio and the amplitude response operator of the float were smaller. With the increase in the float draft depth, the float capture width ratio decreased and then increased, and the float amplitude response operator increased continuously.
Table 4 shows that, among the factors affecting the float resonant frequency, A (float shape) was again the primary factor, C (float draft depth) was the secondary factor, and B (maximum float radius) was again the least influential factor. Unlike the above results, the float resonance frequency decreased as the float shape changed from conical, frustum, and spherical to cylindrical. A large maximum float radius led to a low float resonant frequency. A high float draft depth led to a low float resonance frequency.
4 Results and discussion
According to the data presented in Sect. 3, to select the maximum capture width ratio for floats of various shapes, a horizontal combination for the maximum capture width ratio could be selected based on factor A (float shape), such as BI (the maximum float radius was 0.8 m) and CIV (the float draft depth was 1.5 m). To verify the correctness of the orthogonal test results and to reflect the significance of the influence of each factor on the float hydrodynamic performance, the minimum float capture width ratio for each shape of floats was selected and a corresponding degree of improvement in the float capture width ratio was calculated. The horizontal combination selected was BIV (the maximum float radius was 1.4 m) and CII (the float draft depth was 0.9 m). The horizontal combination of the selected factors is shown in Table 6, and the corresponding hydrodynamic characteristics of the float are shown in Figs. 3 and 4. To facilitate the presentation of the results, the symbols are defined, the meanings of which are provided in Table 7.

Hydrodynamic characteristics of floats with different shapes at the maximum capture width ratio: a capture width ratio, b wave force, and c RAO

Hydrodynamic characteristics of floats with different shapes at the minimum capture width ratio: a capture width ratio, b wave force, and c RAO
Four main conclusions are obtained from Figs. 3(a) and 4(a). First, for both \({\text{Float}}_{{{{\max\eta }}}}\) and \({\text{Float}}_{{{{\min\eta }}}}\), the float capture width ratio was the largest for the cylindrical float, which decreased sequentially for the spherical float, the frustum float and the conical float. Second, for both \({\text{Float}}_{{{{\max\eta }}}}\) and \({\text{Float}}_{{{{\min\eta }}}}\), the dramatic changes in the float capture width ratio were the largest for the cylindrical float, which decreased sequentially for the spherical float, the frustum float and the conical float. Third, the frequency range of efficient energy-capturing for \({\text{Float}}_{{{{\max\eta }}}}\) was small, that is, the float resonance frequency range was small. However, the float resonance frequency range for \({\text{Float}}_{{{{\min\eta }}}}\) was large. Fourth, the maximum capture width ratio did not necessarily occur at the float resonance frequency because the capture width ratio was also affected by the additional mass, the radiation damping, and the wave force; these factors were also indirectly reflected in the float shape, the maximum float radius, and the float draft depth.
Two main conclusions are obtained from Figs. 3b and 4b. First, for both \({\text{Float}}_{{{{\max\eta }}}}\) and \({\text{Float}}_{{{{\min\eta }}}},\) the magnitude of the change in the wave force decreased sequentially from the cylindrical float to the spherical float, the frustum float and the conical float. Second, compared with \({\text{Float}}_{{{{\max\eta }}}}\), the float shape for \({\text{Float}}_{{{{\min\eta }}}}\) tended to be flatter, which caused it to be subject to a larger wave force, with a maximum value of 60,000 N. However, the float capture width ratio was not significantly correlated to the wave force received by the float, which can be determined by the float shape, as shown in Table 8. Therefore, the wave force acting on the float is not the most powerful basis to judge the energy-capturing characteristics of the float.
Two main conclusions are obtained from Figs. 3c and 4c. First, the performance of the float amplitude response operator was similar to that of the float capture width ratio, indicating a significant correlation between them. Second, for both \({\text{Float}}_{{{{\max\eta}}}}\) and \({\text{Float}}_{{{{\min\eta }}}},\) the steepness in the RAO changes decreased sequentially from the cylindrical float to the spherical float, the frustum float and the conical float.
Although some conclusions have been drawn from the research, some shortcomings and room for development remain. The orthogonal test method still has some limitations. This method cannot obtain the optimal combination of levels at a particular frequency. In this study, only four types of common float shapes were investigated, and other combined or special float shapes are still to be considered. In addition, this study only analyzed the maximum float radius and the float draft depth at four levels. These questions will be supplemented in future research.
5 Conclusion
In this study, based on different float shapes, different maximum radii, and different draft depths, the orthogonal test method was combined with AQWA hydrodynamic simulations to comprehensively analyze the hydrodynamic characteristics of floats in the frequency domain. According to the horizontal orthogonal table, the influence degrees of the different factors on the test target were obtained. Finally, the float with the maximum capture width ratio and the float with the minimum capture width ratio were selected for comparative study, and the capture width ratio, wave force, and amplitude operator curves were plotted.
Three primary conclusions were drawn from this research. The influence degree of each factor on the capture width ratio and resonance frequency of the float is in descending order: Float shape > Float draft depth > Maximum float radius. The influence degree of each factor on the amplitude response operator of the float is ranked from large to small: Float shape > Maximum float radius > Float draft depth. In addition, at a higher draft depth, a “slender” float shape had a larger capture width ratio and amplitude response operator but a smaller resonance frequency. Compared with a “slender” float shape, at a lower draft depth, a “flat” float shape had a smaller capture width ratio and amplitude response operator but a larger resonance frequency. The key point is that the float capture width ratio was significantly correlated with the float resonance frequency. However, the maximum float capture width ratio was not necessarily at the resonance frequency. The float capture width ratio was also affected by the additional mass, the radiation damping and the wave force. These factors were indirectly reflected in the float shape, the maximum float radius, and the float draft depth. The float capture width ratio had little correlation with the wave force received by the float, which could be determined by the float shape. Therefore, the wave force acting on the float is not the most powerful basis to judge the energy-capturing characteristics of the float.
Supplementray Information
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Farrok O, Ahmed K, Tahlil AD, Farah MM, Kiran MR, Islam MR (2020) Electrical power generation from the oceanic wave for sustainable advancement in renewable energy technologies. Sustainability 12:2178–2200. https://doi.org/10.3390/su12062178
Jiang B, Wu G, Ding J, Ma C, Fang Y, Wang X (2019) Assessment of the wave energy resource in the South China sea. Proc Inst Civ Eng Maritime Eng 172:23–33. https://doi.org/10.1680/jmaen.2018.29
Mwasilu F, Jung J-W (2019) Potential for power generation from ocean wave renewable energy source: a comprehensive review on state-of-the-art technology and future prospects. IET Renew Power Gener 13:363–375. https://doi.org/10.1049/iet-rpg.2018.5456
Zheng X, Li X, Xu X, Zeng Y, Chen J (2021) Numerical simulation and characteristic analysis of ocean waves in the Taiwan Strait. Mar Forecasts 38:31–39
Al Shami E, Zhang R, Wang X, (2018) Point absorber wave energy harvesters: a review of recent developments. Energies 12:47–82. https://doi.org/10.3390/en12010047
Lopez I, Andreu J, Ceballos S, de Alegria IM, Kortabarria I (2013) Review of wave energy technologies and the necessary power-equipment. Renew Sustain Energy Rev 27:413–434. https://doi.org/10.1016/j.rser.2013.07.009
Liu Y, Wu S, Wang D, Wang R (2021) Research progress of ocean wave energy converters. J Shandong Univ (Eng Sci) 51:63–75
Shi H, Liu Z (2021) Research status and development tendency of ocean wave energy. Sci Technol Rev 39:22–28
Liu Y, Wang W, Chen Z, Wang D, Wang D, Xue G (2020) The influence of shape parameters of wave energy device floating body on energy capture characteristics. J Shandong Univ (Eng Sci) 50:1–8
Mccabe AP (2013) Constrained optimization of the shape of a wave energy collector by genetic algorithm. Renew Energy 51:274–284. https://doi.org/10.1016/j.renene.2012.09.054
Garcia-Teruel A, DuPont B, Forehand DIM (2020) Hull geometry optimisation of wave energy converters: on the choice of the optimisation algorithm and the geometry definition. Appl Energy 280:115952–115968. https://doi.org/10.1016/j.apenergy.2020.115952
Dong J, Gao J, Zheng P, Zhang Y (2018) Numerical simulation and structural optimization based on an elliptical and cylindrical raft wave energy conversion device. J Renew Sustain Energy 10:064702–064722. https://doi.org/10.1063/1.5042269
Gao X, Liu Z, Zhao X (2020) Study on the influence of float parameters on the efficiency of oscillating float wave power generation. In: E3S web of conferences, vol 206, p 03027
Fang HW, Jin LT (2019) Investigation on resonance response of mass-adjustable float in wave energy conversion system. Innov Solutions Energy Transit 158:315–320. https://doi.org/10.1016/j.egypro.2019.01.095
Hollm M, Dostal L, Yurchenko D, Seifried R (2022) Performance increase of wave energy harvesting of a guided point absorber. Eur Phys J Spec Top 231:1465–1473. https://doi.org/10.1140/epjs/s11734-022-00497-7
Ma Y, Ai S, Yang L, Zhang A, Liu S, Zhou B (2020) Research on design and optimization of the pitching float wave energy converter. Energy Sci Eng 8:3866–3882. https://doi.org/10.1002/ese3.783
Gao H, Li B (2015) Establishment of motion model for wave capture buoy and research on hydrodynamic performance of floating-type wave energy converter. Polish Maritime Res 22:106–111. https://doi.org/10.1515/pomr-2015-0041
Zheng SM, Zhang YL (2015) Wave diffraction from a truncated cylinder in front of a vertical wall. Ocean Eng 104:329–343. https://doi.org/10.1016/j.oceaneng.2015.04.065
Huang S, Zhai X, Liu Yn, Shi H (2020) Power capture influence of the submerged depth for the three-freedom oscillating body wave energy converter. J Shandong Univ (Eng Sci) 50:17–39
Stansby P, Carpintero Moreno E, Stallard T, Maggi A (2015) Three-float broad-band resonant line absorber with surge for wave energy conversion. Renew Energy 78:132–140. https://doi.org/10.1016/j.renene.2014.12.057
Cai Y, Shen L, Li M (2017) Study on the method of resonance realization for the wave energy converters. J Vib Eng 030:475–482
Luan Z, He G, Zhang Z, Jing P, Jin R, Geng B, Liu C (2019) Study on the optimal wave energy absorption power of a float in waves. J Mar Sci Eng 7:269–282. https://doi.org/10.3390/jmse7080269
Burgaç A, Yavuz H (2020) Power capture performance of a heaving wave energy converter for varying brad/bpto ratio. SN Appl Sci 2:1679–1688. https://doi.org/10.1007/s42452-020-03230-y
Zhi G, Yan J, Liang H, Qiao D, Ning D (2021) Comparison of energy capture efficiency of oscillating buoys of different bottom shapes based on resistive control. Sci Technol Rev 39:53–58
Hu K, Xiao J, Wang J, Zhu C, Huang Z (2018) Orthogonal optimization and analysis of permanent magnet linear generator for internal combustion engines. Small Spec Electr Mach 46:19–33
Yin Y (2012) Principle and device of the ocean wave energy conversion generation. Shanghai Scientific & Technical Publishers, Shanghai
Funding
This study was funded by the National Natural Science Foundation of China (No. 51876114) and Shanghai Engineering Research Center of Marine Renewable Energy (Grant No. 19DZ2254800).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, Y., Qin, C., Du, J. et al. Analysis of the energy-capturing characteristics of floats for point absorption wave energy generators. SN Appl. Sci. 4, 269 (2022). https://doi.org/10.1007/s42452-022-05151-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-022-05151-4