
Abstract
Accumulation of atmospheric icing, particularly wet snow, on the visual sensors/navigators of autonomous vehicles (AVs) increases the possibility of accidents by obstructing the lenses of the sensors. Here, two navigator designs were suggested that use airflow across the lens surfaces of the AVs to prevent snow accumulation on them. The impact of airflow intensity across the lens, wind velocity (relative velocity of wind with respect to vehicle), and liquid water content of snow on prevention of snow accumulation on the lenses of the AVs was explored experimentally. Here, artificial snow grains were formed using a novel snow gun and their average sizes at low liquid water content (LWC of ≈ 8%) and high liquid water content (LWC of ≈ 28%) were measured to study the impact of grain sizes on snow accumulation on camera lenses. The effects of wind velocity, snow density, and diameter of the snow grains on their trajectory in the testing section were also studied numerically. The results indicated that the snow grains with higher velocity, density, or diameter possessed higher inertia forces and were more prone to collide with the navigator, increasing collision efficiency of snow grains. We realized that the airflow across the lens effectively prevented snow accumulation on the lens at vehicle/wind velocities of up to 20 mph. The proposed designs actively reduced the snow accumulation on the camera lens, promising to be applied in future AVs.
Graphic abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The technology of autonomous vehicles (AVs) due to offering mobility to the elder or disabled people, improving safety, saving fuel, reducing emissions, and increasing road capacity has attracted significant attention in recent years [1,2,3]. Adaptive cruise control, stop-and-go cruise control, and lane departure prevention are among the features that AV manufacturers have already started using them to enhance safety [4,5,6]. A series of computer vision, signal processing, sensor fusion, and artificial intelligence problems must be solved to operate a semi or fully AV system [7]. Therefore, electrical and mechanical devices such as radar, ultra-sonic, camera, laser imaging detection and ranging (LIDAR), graphics processing unit (GPU), global positioning system (GPS), and field programable gate array (FPGA) have been employed in AVs for communication, environment recognition, computation, and localization purposes. Visual perception system, an utmost important component of AV systems, translates visual information from multiple cameras and carries out important tasks like pedestrian and vehicle detection [8]. Upon accumulation of atmospheric icing, especially wet snow on the lenses of the cameras, the visual sensors become partly or completely blind and fail to detect the surroundings of the vehicle. Previously, snow ingress into vehicles air intake systems has been studied by several researchers [9,10,11,12,13]. However, snow accumulation/contamination on camera lenses of AVs or other sensors of conventional vehicles has not been studied appropriately [14, 15]. In order to design systems that can prevent accumulation of snow on the lenses, it is necessary to understand snow formation process and properties of snow.
A snow crystal is a single grain of ice that grows due to condensation or freezing of water vapor on tiny solid particles or nuclei [16, 17]. An accumulated snow layer is a porous structure, consisted of air, ice, and liquid water, depending on environmental conditions [18]. The liquid water content (LWC) of snow is defined as the mass ratio of liquid water within snow to the total snow, as a percentage [19]. The source of the liquid water within snow can be either rain, ice melting, or a combination of both [20]. The ice melting rate is controlled by temperature and vapor density gradients inside the snow layer, which are caused due to snow heat exchange with its surroundings [21]. In general, the internal energy of an accumulated snow on a surface changes by radiation, sensible, latent, conductive, and advective heat/energy fluxes [22]. The LWC impacts the cohesion strength of snow or its adhesion strength to various surfaces and is an important parameter in static and dynamic simulations of systems that contain snow. A snow layer depending on the amount of the liquid water which it holds can be characterized as dry or wet. Generally, at temperatures lower than the freezing point of water (i.e. less than 0 °C), a snow layer has powdery texture and is composed of just air and ice (LWC = 0%) [23]. When there is a positive net heat transfer from the environment to the snow layer, dry snow grains melt, round their crystalline structure and alter to wet snow [24]. The heat transfer to the snow layer can be due to increased air temperature and/or radiation. The heat exchange at snow surface controls the amount of air, ice, and water inside the snow layer. It is revealed that low heat transfer rate to a snow layer leads to low snow layer density \(({\rho }_{l}<\approx 100 \mathrm{kg}/{\mathrm{m}}^{3})\), low liquid water content \((\mathrm{LWC}<\approx 5\%)\), and air domination in snow structure (more than \(\approx\) 70%) [22, 24].
Previously, extensive numerical and experimental research has been carried out to examine snow accumulation on overhead structures such as power transmission lines [25,26,27,28]. One of the utmost important parameters in numerical modeling of snow accumulation on surfaces is collision efficiency of snow grains \(({\alpha }_{1})\), impacting the extent of snow accumulation on the object [29,30,31,32,33]. The collision efficiency \({(\alpha }_{1})\) is the proportion of the number of the snow grains that collide with an object to the number of the grains moving towards the object, that they would hit the object if they do not deflect around it. The collision efficiency of the snow grains moving toward an object can be obtained by tracing the trajectory of the grains. Wakahama et al. investigated trajectory of snow grains when they were moving toward a cylindrical surface [34]. They observed that the snow grains did not follow the air streamlines around the object and their trajectories were very straight, translating to \({\alpha }_{1}=1\). However, it has been observed that by decreasing the density or the size of the snow grains, the snow grains do not go through straight lines and some pass by the object [30]. Therefore, numerical and experimental studies have been carried out to examine the effects of the density, size, and velocity of the snow grains, and the geometry of the object on the trajectory of the snow grains [28, 35,36,37]. The results of these studies have revealed that by increasing the density, size, and velocity of snow grains, they possess higher inertia force and are not prone to follow the air streamlines around the object. In addition, it has been shown that the snow grains that are moving toward bigger objects experience higher drag forces when compared to their inertia forces, being inclined to follow the air streamlines without colliding to the object [28].
Sticking efficiency of snow \(({\alpha }_{2})\) is another important parameter that affects the snow accumulation on surfaces. \({\alpha }_{2}\) is defined as the proportion of the number of the particles that stick to a surface to the number of the particles that collide with the surface. Higa et al. have concluded that plastic deformation is a major cause of energy dissipation of icy grains upon impact to a surface. When snow grains collide to a surface, a force develops in opposition to the bond or bonds holding the surface particles together. Upon impact of the snow grains to a hard surface, the snow grains preserve most of their kinetic energy. However, the snow grains that impact to a soft surface break the bonds connecting the surface materials to each other and lose most of their energy [38, 39]. The LWC of snow grains is an important parameter that affects the interfacial forces during the impact. It has been proved that snow has its maximum cohesion and adhesion strengths at LWC values of ≈ 20%, and consequently stick strongly to surfaces [40, 41]. Due to weak stickiness of dry snow grains (LWC < 5%) to surfaces, snow accumulation at sub-freezing temperatures is limited to low wind velocities \(\left(\left|\overrightarrow{U}\right|\le 2\, \mathrm{m}/\mathrm{s}\right)\) [27]. By increasing the LWC of snow, the stickiness of snow grains increases rapidly and the possibility of their re-bouncing from surfaces decreases. However, at LWC of > 20% the snow cohesion and adhesion strengths decrease, reducing the stickiness of snow grains to surfaces. This is because of the domination of water in snow grains. Wind velocity is another important parameter that affects the sticking of snow grains during their collision with a surface. The snow grains with higher velocities possess higher inertia forces, thus can overcome the interfacial forces and re-bounce from the surface more efficiently. Therefore, sticking efficiency of the snow grains decreases with wind velocity.
Previously, passive methods of mitigation of ice and snow have been extensively investigated by developing surface coatings that are mostly focused on reducing ice adhesion strength or delaying freezing [42,43,44]. However, these coatings lack durability and/or scalability and have mostly focused on mitigation of icing. Passive snow repulsion and shedding methods are largely unexplored areas and there is no fully passive method or reliable coating that has shown any promise in minimizing snow accumulation. Therefore, here an active method is developed to prevent snow accumulation on surfaces by creating a controlled airflow across surfaces.
To actively minimize/prevent snow accumulation on the lenses of the cameras, we proposed two different navigator designs (A and B) (Fig. 1c, d) [14, 15]. Design A includes a fan and design B includes a blower, accompanied by a ram air duct, to generate an airflow over the lens. To examine the effectiveness of each design, we created snow using a novel snow gun with controlled air/water ratio leading to snow grains with controlled density, size, and liquid water content (LWC). We studied snow accumulation on camera lenses of the AV systems at different relative velocities of wind with respect to vehicle (hereafter wind velocities) and snow LWC values, with and without using the airflow over the lens. To better understand the experimental observations, we also conducted a numerical study to investigate the effects of velocity, density, and diameter of snow grains on collision efficiency of snow grains, directly impacting their accumulation. Additionally, the numerical approach was utilized to study the collision efficiency of snow grains moving toward navigators with conical and hemispherical heads. We showed that utilizing a fan in design A or a blower in design B that operated at a maximum duty cycle, the snow accumulation on the camera lens decreased significantly. The results of this study pave a path for designing systems that mitigate snow accumulation issues in AVs, enabling their operation during extreme snow weather conditions.

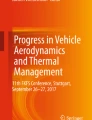
a A side view of the testing section of the wind tunnel including the navigator fixed at the center of the section by clamps. A Panasonic HX-A100 camera was used to monitor real-time front view of snow accumulation on the navigator. b An image showing the front view of the navigator. Real-time inside view monitoring of snow accumulation on the navigator was carried out by a GoPro camera. The lens surface temperature was detected via a K-type thermocouple. Furthermore, the wetness of the accumulated snow on the camera lens was detected using a liquid water content (LWC) sensor. Schematics of the navigators of design A and design B are shown in c and d, respectively. A fan in design A and a blower, accompanied by a ram air duct, in design B were used to generate an airflow across the lens to minimizes/prevents snow accumulation on the lens
2 Materials and methods
2.1 Experimental section
2.1.1 Snow formation and characterization
Here, snow was generated using a snow gun operating inside a walk-in cold room that could reach temperatures up to − 20 °C [41]. Water and compressed air (Pressure = 50 psi) were mixed inside the snow gun with the mass ratio of 95–98% water to air; the mixture leaves the nozzle of the snow gun as small water droplets with the mass flow rate of \(0.27\, \mathrm{g}/\mathrm{s}\). The diameter of the nozzles of the snow gun was 1.58 mm. The cold room was connected to a wind tunnel that reaches velocities of up to 40 mph using a fan. A test section was designed inside the wind tunnel to enable assembling various specimens inside, while thermally insulated to ensure monitoring of snow interaction with the specimens at low temperatures. Figure 2 shows a schematic of this indoor facility highlighting the cold room, test section, and the snow gun that has four nozzles. Photos of this facility are shown in Figure S1. Depending on the temperature of the cold room, the water droplets leaving the nozzle of the snow gun froze partially or completely prior to impact to a given surface (i.e. lens of the navigator). The freezing process of the snow grains was controlled by adjusting the cold room temperature and the distance between the snow gun and the test surface, eventually controlling the LWC of the artificially-generated snow. A high-speed camera (OLYMPUS, i-SPEED TR, 10,000 fps) was used for capturing the slow-motion side-view videos of snow grains, moving in the testing section. The images of the moving snow grains were extracted from the videos and analyzed with ImageJ processing tool to measure the diameter of the snow grains. Video S1 was captured with a high-speed camera at 10,000 fps, showing snow grains with \(\mathrm{LWC}\approx 8\%\) moving inside the testing section. The average diameter of the snow grains at LWC values of \(\approx 8\%\) and \(\approx 28\%\) were measured to be \({d}_{\mathrm{g}}=30.33\pm 13.92 \, \mu\mathrm{m and }{d}_{\mathrm{g}}=43.53\pm 24.99 \,\upmu\mathrm{m}\), respectively. The density of snow layers formed by accumulation of grains were also measured, while controlling the LWC of snow at low (≈ 2%), intermediate (≈ 15%), and high (≈ 25%) values (Supporting Information, S1).

a A schematic of a walk-in cold room connected to a wind tunnel. The cold room temperature can reach to temperatures as low as − 20 °C. Navigator of the autonomous vehicles (AVs) is placed in the testing section and the cold air is driven to the testing section via the fan at the end of the wind tunnel. The airflow velocity in the testing section can reach up to 40 mph. A snow gun is placed right at the inlet of the wind tunnel to create snow with controlled properties
A sensor was used to measure the LWC of the accumulated snow layer on the navigators [45]. The sensor measures the LWC of snow layer based on the electrical resistance of the accumulated snow on the sensor, while monitoring the temperature of the snow covering the surface. By correlating the electrical resistivity to the LWC values, any resistivity measurement will be indicative of the extent of liquid water that exists in the snow layer. The correlation between the LWC and electrical resistance of snow were found based on multiple experiments conducted using natural snow and verified by machine-made artificial snow [46]. Melting calorimetry, which is also known as Endo-type snow water content meter, was used to verify the LWC values measured by the sensor (Supporting Information, S2).
2.1.2 Snow accumulation
Snow accumulation tests were carried out by placing the object of interest (navigator on which a camera lens is embedded) inside a thermally insulated test section of the wind tunnel that was connected to the cold room, where the artificial snow formed using the snow gun. The navigator was fixed in the center of the test section using clamps. A fan at the end of the wind tunnel was used to drive the cold air from the cold room toward the test section and then return it to the cold room to maintain low temperatures in the test section (Fig. 2). The snow gun was placed inside the cold room right at the inlet of the tunnel’s test section to allow the cold airflow to drag the formed snow grains through the test section. Figure 1a, b show the experimental setup inside the test section of the wind tunnel. K-type thermocouples were used to measure the navigator’s chamber temperature, the surface temperature of the camera lens, and the test section temperature. Moreover, a LWC sensor was used to measure the LWC and temperature of the accumulated snow on the cap of the navigator [45]. All the measured data were collected via a CR1000 data logger. Two different navigators (A and B) were designed to decrease the accumulation of snow on the camera lenses via airflow passing across the lenses. In design A (Fig. 1c), a fan at the back of the navigator was utilized to pull the air inside the chamber of the navigator and flow it across the lens. Figure 1d shows the schematic of the design B, consisting of a blower and a ram air duct to create airflow across the lens. Real-time inside view monitoring of the accumulated snow on the navigator was carried out using a GoPro HERO session camera. Furthermore, a Panasonic HX-A100 camera was installed in front of the navigator to record the front view snow accumulation on the lens (Fig. 1a, b).
2.2 Numerical section
In this study, the snow grains were assumed as spherical particles that move in continuous medium of air and the drag forces exerted on them were calculated based on spherical drag law [47]. Since machine-made snow grains are made of freezing water droplets, their density was assumed to be similar to ice density (\({\rho }_{g}=\) 920 kg/m3). However, the numerical procedure was also repeated for the snow grain density of \(700\,\mathrm{kg}/{\mathrm{m}}^{3}\) to investigate the impact of grain density on the collision efficiency \(({\alpha }_{1})\) of the snow grains. Here, navigators with flat, conical, and hemispherical heads were used to examine the effects of different navigator geometries/configurations on the collision efficiency \(({\alpha }_{1})\) of snow grains. The diameters of the navigator, test section of the wind tunnel, and the camera lenses (embedded on the navigators) were \({D}_{n}=16.5\) cm \(, {D}_{t}=30.5\) cm, and \({D}_{l}=4\) cm, respectively. These values are important in studying the trajectories of the snow grains in the air, flowing through the navigator.
The collision efficiency (\({\alpha }_{1})\) of the snow grains moving in the testing section was numerically examined using the Fluent software [48]. In order to find velocity field and the air streamlines around the navigator, continuity and Navier–Stokes equations were solved using realizable κ-ε turbulence model. General continuity and Navier–Stokes equations are as the following differential equation [49, 50]:
where \(\overrightarrow{U}\) is the wind velocity, \(\rho\, (\mathrm{kg}/{\mathrm{m}}^{3})\) is the density of the continuous medium, which can be air, \(\phi {, \Gamma }_{\phi }, {S}_{\phi }\) are the dependent variable, diffusion coefficient, and the source term, respectively (see Supporting Information, Table S1 for details) [28]. The inlet and outlet of the computational domain were assumed as velocity inlet and pressure outlet with zero-gauge pressure, respectively. Additionally, the upper domain of the test section and the navigator were assumed as no-slip wall boundary condition and the lower surface was assumed as axisymmetric boundary condition.
Discrete Phase Models (DPM) model was used to model the trajectories of the snow grains moving toward the navigator. The equation of motion of the snow grains is:
where \({f}_{d}\) is defined as:
\(\overrightarrow{{V}_{g}}\) is the velocity of the snow grains, \({f}_{d}\left(\overrightarrow{U}-\overrightarrow{{V}_{g}}\right)\) is drag force per unit mass of the snow grains, \({C}_{d}\) is the drag coefficient, \(\overrightarrow{g}\left({\rho }_{g}-{\rho }_{a}\right)/{\rho }_{g}\) is the net buoyancy and weight forces, and \({Re}_{r}\) is the Reynolds number based on the airflow velocity relative to the snow grains (\(\left|\overrightarrow{U}-\overrightarrow{{V}_{g}}\right|\)). In the numerical modeling, the effects of buoyancy and weight forces were neglected.
3 Results and discussion
Snow is composed of ice grains, air, and water and its accumulation on substrates, lead to formation of a snow layer. Snow is in funicular regime when gaps between ice grains is mostly filled by liquid water with minimal air. In this regime, there is water movement inside the snow layer toward the substrate. The LWC sensor is surface mountable, providing the extent of liquid water of snow layer at its interface with the substrate. Therefore, in funicular regime, the measured LWC of snow layer (on the substrate) is higher than the LWC of individual snow grains. Snow is in so-called pendular regime, when the LWC by mass is below \(\approx\) 27% [51]. Air and small amounts of water fill the gaps between the ice grains. Therefore, since there is no water movement inside the snow layer in the pendular regime, it can be assumed that the LWC of an individual snow grain is approximately equal to the LWC of a snow layer (measured by the sensor). This approximation was used throughout our study.
Since the size of snow grains greatly impact the drag and inertia forces applied to them, it is pertinent to consider the size of snow grains in numerical and experimental investigations of the systems containing snow. Therefore, indoor experiments were conducted with a control in the cold room temperature to form snow with low LWC (≈ 8%) and high LWC (≈ 28%), while measuring the diameter of snow grains (see experimental section). The snow grains with higher LWC values were more inclined to agglomerate to each other, leading to bigger sizes. The artificial snow grains formed by the snow gun were different than natural snow crystals, as explained in the international classification of snow [20]. The snow grains form because of the freezing of the water droplets coming out of the nozzle in a relatively short time; thus, they mostly have a spherical shape. The density of snow grains with spherical shape can be assumed to be similar to ice, i.e. \(920 \, \mathrm{kg}/{\mathrm{m}}^{3}\) [13, 30, 52]. However, since the freezing process starts at the outer layer of the water droplets and marches toward the center of the droplets, high pressure builds up as the core starts to freeze. This may result in air pocket formation inside the grain, leading to a bulge at its surface or even to fracture of the snow grains [53]. In order to address this uncertainty associated with the density of snow grains, the numerical procedure was repeated assuming snow grain density of \(700\, \mathrm{kg}/{\mathrm{m}}^{3}\) to examine its impact/sensitivity on the collision efficiency \(({\alpha }_{1})\) of the snow grains. In addition to snow grain, the density of snow layers formed by accumulation of grains were also measured, while controlling the LWC of snow at low (≈ 2%), intermediate (≈ 15%), and high (≈ 25%) values (Supporting Information, S1). It was found that at lower temperatures, the snow has powdery texture and lower LWC value, leading to lower densities of snow layer. However, at higher temperatures, there is more water in the snow layer (higher LWC value), which fills the pore spaces between ice grains and leads to higher densities of the snow layer.
Once the correlation between density and LWC of snow layer and the distinction between snow grain and snow layer density were learned, the interaction of snow grains with surfaces was studied. The fan or blower duty cycle can be controlled from 0 to 100%. Many experiments were conducted with the fan or blower duty cycles ranging from 20 to 100%; however, the results indicated lack of efficiency of both designs in minimizing snow accumulation when duty cycles of less than 100% were used in the fan (results are not shown here). Therefore, further experiments were focused on cases where the fan or blower duty cycle was set to 100%. The progressive front view of the snow accumulation on the navigator of the designs A and B at different wind velocities and fan duty cycle of 100% are shown in Figs. 3 and 4, respectively. In order to visualize the snow accumulation on the lens from a closer view, a GoPro camera was used inside the navigator. The progressive inside view of the snow accumulation on the lens of designs A and B are shown in Figs. 5 and 6. In design A, the airflow across the lens maintained the lens clean at wind velocities of up to 20 mph. At wind velocity of 20 mph snow accumulation on the lens started to grow from the sides of the lens, changed the state of the lens from "not covered" to "partly covered" with snow. However, the camera was still able to detect the environment all along the experiment. At wind velocity of 30 mph, the snow started to accumulate on the lens from the very first stages of the experiment and blocked it (Figs. 3 and 5). In design B, the lens was maintained clean at wind velocities of up to 10 mph. At critical wind velocity of 20 mph, snow accumulation on the lens was increased with time and after 36 min the lens was completely covered with snow. At wind velocities higher than 20 mph, it was observed that the snow accumulation on the lens was increased with wind velocity and time. A potential explanation for this phenomenon is that the snow grains with higher velocities possess more inertia force and do not follow the air streamlines around the lens, thereby hit the lens. In addition, the snow grains with higher velocities can overcome the air pockets on the lens, therefore hit the substrate and stick to it. To further explain the extent of snow accumulation on the lens during each experiment, numerical simulations were conducted (see numerical section).

The progressive front view of the snow accumulation on the navigator of design A at wind velocities of 5 mph (\({Re}_{{D}_{l}}=6.68\times {10}^{3}\)), 10 mph (\({Re}_{{D}_{l}}=13.36\times {10}^{3}\)), 20 mph (\({Re}_{{D}_{l}}=26.73\times {10}^{3}\)), and 30 mph (\({Re}_{{D}_{l}}=40.09\times {10}^{3}\)) and 100% fan duty cycle. The dashed circles show the camera lens. At higher wind velocities the snow grains have more inertia force to overcome the artificial airflow over the lens colliding the navigator/camera lens and eventually accumulating on them. The width of each image is 17 cm

The progressive front view of the snow accumulation on the navigator of design B at wind velocities of 10 mph (\({Re}_{{D}_{l}}=13.36\times {10}^{3}\)), 20 mph (\({Re}_{{D}_{l}}=26.73\times {10}^{3}\)), 30 mph (\({Re}_{{D}_{l}}=40.09\times {10}^{3}\)), and 40 mph (\({Re}_{{D}_{l}}=53.46\times {10}^{3}\)) and 100% blower duty cycle. At higher wind velocities the snow grains have more inertia force to overcome the artificial airflow over the lens, colliding with it and eventually accumulating on it. The width of each image is 17 cm

The progressive inside view of the snow accumulation on the navigator of design A at wind velocities of 5 mph (\({Re}_{{D}_{l}}=6.68\times {10}^{3}\)), 10 mph (\({Re}_{{D}_{l}}=13.36\times {10}^{3}\)), 20 mph (\({Re}_{{D}_{l}}=26.73\times {10}^{3}\)), and 30 mph (\({Re}_{{D}_{l}}=40.09\times {10}^{3}\)) and 100% fan duty cycle. The GoPro camera is able to record a closer view of snow accumulation on the lens. The airflow on the lens created by the fan is able to maintain the lens clear of the snow at wind velocities of up to 20 mph. The width of each image is 8.5 cm

The progressive inside view of the snow accumulation on the navigator of design B at wind velocities of 10 mph (\({Re}_{{D}_{l}}=13.36\times {10}^{3}\)), 20 mph (\({Re}_{{D}_{l}}=26.73\times {10}^{3}\)), 30 mph (\({Re}_{{D}_{l}}=40.09\times {10}^{3}\)), and 40 mph (\({Re}_{{D}_{l}}=53.46\times {10}^{3}\)) and 100% blower duty cycle. The GoPro camera is able to record a closer view of snow accumulation on the lens. The snow accumulation on the lens blocked the lens at wind velocity of 20 mph or higher. The width of each image is 8.5 cm
3.1 Trajectory of snow grains in air
Understanding trajectory of snow grains in air is crucial in examining snow accumulation on various surfaces. To this end, collision efficiency (\({\alpha }_{1})\) of the snow grains, defined as the ratio of the snow grains hitting/colliding a surface to the ones moving towards it, is an important parameter to be investigated. Therefore, the collision efficiency (\({\alpha }_{1})\) was investigated via a 2-D numerical investigation [48]. \({\alpha }_{1}\) depends on the density, size, and velocity of the snow grains, and the geometry of the object. Based on these parameters, stokes number (St), and Reynolds number (Re) are the main dimensionless parameters in specifying the collision efficiency (\({\alpha }_{1}\)) of the snow grains. The Re is the ratio of the inertia forces to the viscous forces and the St is the proportion of the snow grain response time to the flow response time, defined as below:
where \({\rho }_{a}\) (kg/m3) and \({\rho }_{g}\) (kg/m3) are the density of the air and snow grains, respectively; \(\overrightarrow{U}\) (m/s) is velocity vector of the wind; \(\mu\) (pa.s) is the dynamic viscosity of the medium environment (in this study, air); \({d}_{g}\) (m) is the diameter of the snow grains; and \({l}_{0}\) (m) is the characteristic dimension of the object; and \({t}_{0}\, (\mathrm{s})\) is the response time of the particles.
The concept of streamlines helps to visualize and understand wind motion around the navigator. Using the realizable κ-ε turbulence model, the continuity and Navier–Stokes equations were solved to find velocity field and the air streamlines around the navigator (see numerical section). The wind velocity streamlines around the navigator are shown in Fig. 7a. At the front section (vertical surface) of the navigator, the wind has higher total pressure and lower velocity. However, at the top section (horizontal surface) of the navigator, the flow surface area decreases, thereby the velocity of wind increases dramatically. At the sharp edges of the navigator, separation occurs which results in higher form drag values. Form drag is caused by differences between the pressure distribution over a body in viscous flow [54].

a The air streamline and b the snow grain's velocity field when the lens diameter and wind velocity are \({D}_{l}=4\, \mathrm{cm}\) and \(\left|\overrightarrow{U}\right|=5\, \mathrm{m}/\mathrm{s}\), respectively. Diameter of snow grains is \({d}_{g}=30.33\, \upmu\mathrm{m}\) and their density is assumed to be \({\rho }_{g}=920\, \mathrm{kg}/{\mathrm{m}}^{3}\). The collision efficiency (\({\alpha }_{1}\)) of the snow grains with varying grain density (\({\rho }_{g}\)) of 920 \(\mathrm{kg}/{\mathrm{m}}^{3}\) and 700 \(\mathrm{kg}/{\mathrm{m}}^{3}\) and diameter (\({d}_{g}\)) of c \(30.33\, \upmu\mathrm{m}\) and d \(43.53 \,\upmu\mathrm{m},\) as a function of dimensionless Re number. The density, velocity, and the size of the snow grains are momentous factors in determining their collision efficiency (\({\alpha }_{1}\)) traveling toward the lens. Regardless of the snow grain size, their collision efficiency is comparable at low Re numbers with varying snow grain densities
The trajectory of the snow grains was obtained using DPM (Discrete Phase Model) model in the Fluent software, to study the extent of snow accumulation on the lens of the AV systems (see numerical section). The velocity field of the snow grains with diameter of \({d}_{g}=30.33\, \upmu\mathrm{m}\) and density of \({\rho }_{g}=920\, \mathrm{kg}/{\mathrm{m}}^{3}\) when wind velocity is \(\left|\overrightarrow{U}\right|=5\, \mathrm{m}/\mathrm{s}\), is shown in Fig. 7b. Most of the snow grains due to their small sizes do not possess enough inertia force to collide with the navigator or the lens; therefore, they mostly follow air streamlines around the navigator. Based on the trajectory of the snow grains, obtained by the Fluent simulations, \({\alpha }_{1}\) can be obtained by the following equation:
where \(\delta\) (cm) is y-coordinate of the critical grain at the inlet that can be defined as the last grain which hits the camera lens.
In order to implement the numerical method in snow movement investigations, there is a need for validation of the method. Makkonen and Stallabrass experimentally investigated the collision efficiency of ice grains with median diameters of 12–17 \(\upmu\mathrm{m}\) moving in a freezing room toward cylindrical objects [30]. In order to verify its reliability, our numerical method was applied to some of the geometries used by Makkonen and Stallabrass, by calculating the collision efficiency of ice grains. As shown in Table S2, our numerical method successfully predicts the collision efficiencies obtained by Makkonen and Stallabrass, suggesting its reliability for obtaining the trajectory of snow grains around the camera lenses.
Figure 7c, d show collision efficiency (\({\alpha }_{1}\)) of the snow grains with given density and diameter as a function of wind velocity. When the wind velocity increases from ≈ 1 mph (Re ≈ 1) to ≈ 40 mph (Re ≈ 40), the collision efficiency of snow grains with density of \({\rho }_{g}=920\,\mathrm{ kg}/{\mathrm{m}}^{3}\) and diameter of \({d}_{g}=30.33\,\upmu\mathrm{m}\) increases from ≈ 0.057 to ≈ 0.49. This indicates the sensitivity of the collision efficiency of the snow grains to wind speed. A comparison between Fig. 7c, d indicates that, at a constant diameter of the snow grains, when the density of snow grains increases the \({\alpha }_{1}\) increases. At low Re, the difference between the collision efficiency of same size snow grains with densities of \(920\, \mathrm{kg}/{\mathrm{m}}^{3}\) and \(700\, \mathrm{kg}/{\mathrm{m}}^{3}\) \((\Delta {\alpha }_{1})\) is insignificant. However, by increasing the Re number, \(\Delta {\alpha }_{1}\) values increase and become maximum at Re ≈ 22 and Re ≈ 31 for snow grain diameters of \({d}_{g}=43.53\, \upmu\mathrm{m}\) and \({d}_{g}=30.33 \,\upmu\mathrm{m}\), respectively. By further increase in Re, \(\Delta {\alpha }_{1}\) for both snow grain densities decreases. In addition, the figures show that snow grains with bigger diameters, with the same density of the snow grains, are more prone to hit the surface and have higher \({\alpha }_{1}\). Therefore, it can be concluded that grains with more mass (diameters and/or densities) due to their higher inertia forces are more likely to hit the navigator. The numerical analysis of the movement of snow grains in air leads to a better understanding of snow accumulation on the navigator. Additionally, the numerical approach was utilized to study the collision efficiency \(({\alpha }_{1})\) of snow grains moving toward navigators with conical and hemispherical heads. Figure 8 shows the normalized collision efficiency of snow grains at conical and hemispherical configurations for Re ranging from ≈ 1 to ≈ 60. At each Re, the collision efficiency of snow grain was normalized by dividing over the collision efficiency of snow grains hitting the flat navigator head. The results indicated that the collision efficiency of snow grains impacting these new head configurations (conical and hemispherical) were higher than those impacting the flat head. It is believed that the snow grains moving toward conical and hemispherical configurations experience lower drag values and are informed about the existence of the navigator ahead of them with delay, when compared to those grains moving toward the flat head configuration. Therefore, the snow grains at conical and hemispherical configurations most probably collide with the lens. However, since the scattering of snow grains upon impact to a surface obeys cosine law [55], the higher collision efficiency for conical and hemispherical configurations does not necessarily translate to more snow accumulation on the lenses.

The collision efficiency of snow grains moving toward conical and hemispherical configurations normalized by dividing over those efficiency values obtained from flat configuration. The snow grains moving toward conical and hemispherical configurations experience lower drag values, when compared to the ones moving toward the navigator with the flat head. This leads to higher collision efficiency of snow grains moving toward conical and hemispherical configurations, particularly at low Re numbers
3.1.1 Snow accumulation on the navigator
To further examine the effectiveness of each design the normalized thickness of the accumulated snow defined as the proportion of snow thickness at each experiment to a critical/maximum snow thickness was obtained. The normalized thickness of accumulated snow (LWC \(\approx\) 8%) on the lens under control test conditions (without using the fan or the blower of the navigator) at different wind velocities of 5, 10, 20, 30, and 40 mph is shown in Fig. 9a. The snow thickness at different control test conditions is normalized by the maximum snow thickness \(({t}_{max}=22 \, \mathrm{mm})\), which was occurred at 20 mph wind velocity. At low LWC values, the accumulation of snow on the lens is a competing phenomenon between the collision efficiency \(({\alpha }_{1})\) and sticking efficiency \(({\alpha }_{2})\) of the snow grains. \({\alpha }_{2}\) is the proportion of the collided grains that stick to the lens. Based on the results of the numerical modeling of moving snow grains, at low wind velocities the snow grains possess lower inertia force and are inclined to follow the air streamlines and pass over the navigator, causing low \({\alpha }_{1}\). However, the grains that succeed to collide with the lens do not possess enough energy to re-bounce from the lens and will eventually accumulate on it, leading to high values for sticking coefficient (\({\alpha }_{2}\)). At higher wind velocities the snow grains, due to their higher inertia forces do not follow the air streamlines and collide with the lens, causing high \({\alpha }_{1}\). However, they possess enough energy to easily re-bounce from the lens and pass through it, causing low \({\alpha }_{2}\). Between these two extremes there is an optimum point where the competition between the \({\alpha }_{1}\) and \({\alpha }_{2}\) leads to a maximum snow accumulation on the lens. As it is shown in Fig. 9a, the maximum snow accumulation thickness was occurred at 20 mph wind velocity \(({t}_{\mathrm{max}}=22 \,\mathrm{mm})\). At this wind velocity the cumulative effects of \({\alpha }_{1}\) and \({\alpha }_{2}\) on the snow accumulation is maximum. At higher LWC values, the physics of the snow grains are different, resulting in a different snow accumulation behavior.

a Normalized snow accumulation on the navigator at different wind velocities, indicating that the maximum snow accumulation on the navigator occurs at 20 mph wind velocity (\({Re}_{{D}_{l}}\) number of \(26.73\times {10}^{3}\)). At this wind velocity the multiplication of the collision efficiency (\({\alpha }_{1}\)) with the sticking efficiency (\({\alpha }_{2}\)) is maximum. b Normalized wet and dry snow accumulation at two different wind velocities of 20 mph (\({Re}_{{D}_{l}}\) number of \(26.73\times {10}^{3}\)) and 40 mph (\({Re}_{{D}_{l}}\) number of \(53.46\times {10}^{3}\)), showing the effect of LWC on snow accumulation. By increasing the average LWC of snow from 8 to 28% the collision efficiency (\({\alpha }_{1}\)) and the sticking efficiency (\({\alpha }_{2}\)) of snow grains become almost independent of the wind velocity and both approach to 1. This means more snow accumulation on the navigator at high LWC values, when compared to low LWC values. c The effect of the duty cycle of the fan in design A and the blower in design B on the thickness of the accumulated snow. Upon using the fan or the blower, the normalized snow accumulation on the lens is decreased significantly with an increase in the fan/blower duty cycle, showing efficiency of both designs (A and B) in reducing snow accumulation on the lens
The effect of higher LWC values (LWC \(\approx\) 28%) on snow accumulation at two different wind velocities of 20 mph and 40 mph is presented in Fig. 9b, and the results are compared with the snow accumulation when the LWC values are low (LWC \(\approx\) 8%). In order to visualize the effect of LWC change in the accumulation of snow on the lenses, the snow accumulation results at each wind velocity were normalized by the maximum snow thickness between snow with low LWC (LWC \(\approx\) 8%) and high LWC (LWC \(\approx\) 28%). Therefore, in Fig. 9b, the snow accumulation results at 20 mph are normalized with \({t}_{max}=25\, \mathrm{mm}\) and the snow accumulation results at 40 mph are normalized with \({t}_{max}=20\, \mathrm{mm}\).
Since the difference between the density of water (\(999.9 \, \mathrm{ kg}/{\mathrm{m}}^{3}\)) [56] and ice (\(920.0\, \mathrm{ kg}/{\mathrm{m}}^{3}\)) [57] at \(0\, ^\circ{\rm C}\) is not much, the density of snow grains with different sizes and LWC values are not significantly different. Snow grains with larger average diameter have higher collision efficiency, when compared to the smaller snow grains (Fig. 7c, d). The liquid water inside the snow grain plays a critical role when the grain impacts the camera lenses. The collided snow grains to the lenses have high sticking efficiency \(({\alpha }_{2})\) when the extent of liquid water is high, accreting more significantly on the lenses. Therefore, when the LWC of snow layer increases from 8 to 28%, it means the collision efficiency (\({\alpha }_{1})\) and sticking efficiency (\({\alpha }_{2})\) of snow grains was enhanced as well, with sticking efficiency (\({\alpha }_{2})\) having a predominate effect on the overall snow accumulation.
In addition, the effects of fan duty cycle of design A and blower duty cycle of design B on the accumulation of snow at the critical wind velocity of 20 mph are shown in Fig. 9c. The snow accumulation is normalized by the maximum snow thickness on each design \(({t}_{max,A}=31\, \mathrm{mm},\, {t}_{max,B}=18.5 \, \mathrm{mm})\). Upon using the airflow over the lens, the snow accumulation on the lens was significantly decreased with the duty cycle of the fan and the blower, showing promising efficiency of both designs (A and B) in reducing snow accumulation on the lens (Fig. 9). The maximum snow accumulation on the lens occurred at 0% fan or blower duty cycle. By increasing the duty cycle to 70% and creating an airflow over the lens, the snow accumulation was significantly decreased. However, the reduction rate for design A was observed to be more than that in design B. When the fan duty cycle was increased to 100%, the fan (design A) successfully prevented snow accumulation on the lens. In spite of significant reduction of snow accumulation in design B, a thin layer of snow accumulated on the lens at blower duty cycle of 100%.
The created airflow over the lens prevented snow accumulation on the lens by two different approaches. It changed the air streamlines around the navigator and caused the snow grains to experience higher drag forces in directions diverging from the lens, resulting in lower collision efficiency \(({\alpha }_{1})\) values. Streamlining of this geometry can decrease drag values by avoiding flow separation and can even affect the snow accumulation on the navigator, by changing the α1 and α2 of snow grains. The impact of streamlining can be dramatic and need further investigations. We hypothesize that the airflow on the lens creates air pockets between the snow grains and the lens, resulting in lower contact area between snow grains and surface texture upon impact, thereby lowering sticking efficiency \(({\alpha }_{2})\) values. It is also possible for the airflow to affect energy dissipation of snow grains impacting the surface and lead to enhanced re-bounding of grains. In addition to preventing snow accumulation on the lens, the airflow applies shear stress to the accumulated snow grains on the lens and can remove them from the lens. It is expected that by increasing the turbulence of the flow, the shear stress on the snow increases, and the lens stays clean more efficiently. At wind velocities higher than 20 mph, the snow grains possessed high inertia force and were able to overcome the airflow and accumulate on the lens. Therefore, at these wind velocities, a thin layer of snow accumulated and blocked the lens showing the necessity to use other active snow removal methods such as heating in order to melt the thin layer of snow.
4 Conclusion
Two different designs with flat heads were proposed to prevent snow accumulation on the camera lenses by creating airflow across the lens surface. We found that without using airflow over the lens, the accumulation of low LWC snow (≈ 8%) on the lenses was due to a competition between the collision efficiency \(({\alpha }_{1})\) and sticking efficiency \(({\alpha }_{2})\) of snow grains, with a maximum accumulation observed at 20 mph wind velocity. When the LWC of snow increases to ≈ 28%, the collision efficiency \(({\alpha }_{1})\) and sticking efficiency \(({\alpha }_{2})\) of snow grains increase due to increased diameter of the grains and existence of more water inside them. This resulted in more snow accumulation on the lens, when compared to the accumulation of snow with low LWC (\(\approx\) 8%).
In addition to flat head navigators, the collision efficiency of snow grains moving toward navigators with conical and hemispherical heads were also studied numerically. It was found that the snow grains moving toward the flat head navigators have lower collision efficiency that those moving toward the conical and hemispherical head navigators.
We hypothesize that the airflow over the camera lens (formed and utilized by both designs) changes the air streamlines around the lens and causes the snow grains to experience higher drag forces in directions diverging from the lens. This leads to lower collision efficiency \(({\alpha }_{1})\) values. In addition, we believe that the airflow on the lens forms air pockets between the snow grains and the lens. These air pockets reduce the energy dissipation by decreasing the contact area between the snow grains and the surface textures, resulting in lower sticking efficiency \(({\alpha }_{2})\) values. Despite significant snow accumulation reduction rate observed using both designs, a thin layer of snow covered the lens when the wind velocities were higher than 20 mph. This shows the need to further study snow with varying LWC values and grain sizes interacting with surfaces at higher speeds. The results of this study pave the path for designing snow mitigation strategies applicable to autonomous vehicles that operate at high speeds and extreme weather conditions.
References
Fagnant DJ, Kockelman K (2015) Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations. Transp Res A Policy Practice 77:167–181
Van Brummelen J et al (2018) Autonomous vehicle perception: the technology of today and tomorrow. Transp Res C Emerg Technol 89:384–406
Chavan SP (2020) Public perceptions of autonomous vehicles (AV): a review. Springer, Cham
MarkVollrath SS, Gelau C (2011) The influence of cruise control and adaptive cruise control on driving behavior—a driving simulator study. Accident Anal Prevent 43(3):1134–1139
Hofmann U, Rieder A, Dickmanns ED (2003) Radar and vision data fusion for hybrid adaptive cruise control on highways. Mach Vis Appl 14(1):42–49
Reagan IJ, Kidd DG, Cicchino JB (2017) Driver acceptance of adaptive cruise control and active lane keeping in five production vehicles. Proc Human Factors Ergonomics Soc Ann Meet 61(1):1949–1953
Kim J, Rajkumar RR, Jochim M (2013) Towards dependable autonomous driving vehicles: a system-level approach. ACM SIGBED Rev 10(1):29–32
Shi W et al (2017) Algorithm and hardware implementation for visual perception system in autonomous vehicle: a survey. Integration 59:148–156
Weigand B (2017) A new process to evaluate the risk of an engine power drop caused by snow particles. In: Progress in vehicle aerodynamics and thermal management: 11th FKFS conference, Stuttgart, 26–27 Sept 2017. Springer
Huber C et al (2015) Modeling and numerical calculation of snow particles entering the air intake of an automobile. SAE Int J Passenger Cars Mech Syst 8(2017-01–1342):538–545
Huber C et al (2017) Use of an Eulerian/Lagrangian framework to improve the air intake system of an automobile with respect to snow ingress. SAE Int J Passenger Cars Mech Syst 10(2017-01–1319):487–497
Takamura A, Saito I (2008) Prediction Snow Ingress into Air Intake System. SAE Int J Passenger Cars Mech Syst 1(2008010249):200–207
Yoshitake K et al (2019) Prediction method of snow ingress amount into the engine air intake duct employing LES and detailed snow accumulation model. SAE Technical Paper
Hong H et al (2020) Numerical investigation of snow accumulation on a sensor surface of autonomous vehicle. SAE Technical Paper, 2020-01-0953, https://doi.org/10.4271/2020-01-0953.
Mohammadian B et al (2020) Prevention of snow accretion on camera lenses of autonomous vehicles, SAE Technical Paper, 2020-01-0105, https://doi.org/10.4271/2020-01-0105
Wergin WP, Rango A, Erbe EF (1995) Observations of snow crystals using low-temperature scanning electron microscopy. Scanning 17(1):41–50
Libbrecht K (2005) The physics of snow crystals. Reports Prog Phys 68.
Colbeck CS (1982) An overview of seasonal snow metamorphism (paper 1R1414) 20
Roberge M (2007) A study of wet snow shedding from an overhead cable. In: Masters abstracts international
Fierz C et al (2009) The international classification for seasonal snow on the ground. https://unesdoc.unesco.org/ark:/48223/pf0000186462. UNESCO/IHP.
Marks D et al (2008) Comparing simulated and measured sensible and latent heat fluxes over snow under a pine canopy to improve an energy balance snowmelt model. J Hydrometeorol 9(6):1506–1522
Armstrong RL, Brun E (2008) Snow and climate: physical processes, surface energy exchange and modeling. Cambridge University Press, Cambridge
Snapir B et al (2019) A method for monthly mapping of wet and dry snow using Sentinel-1 and MODIS: application to a Himalayan river basin. Int J Appl Earth Obs Geoinf 74:222–230
Admirat P (2008) Wet snow accretion on overhead lines. Atmospheric icing of power networks. Springer, Berlin, pp 119–169
Makkonen L (1989) Estimation of wet snow accretion on structures. Cold Reg Sci Technol 17(1):83–88
Admirat P, Sakamoto Y (1988) Wet snow on overhead lines: state-of-art. In Proceedings of the 4th international workshop on atmospheric icing of structures, Paris
Sakamoto Y (2000) Snow accretion on overhead wires. Philos Trans R Soc Lond Ser A Math Phys Eng Sci 358(1776):2941–2970
Mohammadian B et al (2020) Experimental and theoretical studies of wet snow accumulation on inclined cylindrical surfaces. Model Simul Eng 2020:9594685
Makkonen L (2000) Models for the growth of rime, glaze, icicles and wet snow on structures. Philos Trans R Soc Lond Ser A Math Phys Eng Sci 358(1776):2913–2939
Makkonen L, Stallabrass J (1987) Experiments on the cloud droplet collision efficiency of cylinders. J Clim Appl Meteorol 26(10):1406–1411
Nagare B et al (2015) Comparison of measured and calculated collision efficiencies at low temperatures. Atmos Chem Phys 15(23):13759–13776
Yoon B, Ettema R (1993) Droplet trajectories and icing-collision efficiencies for cylinders determined using LDV. Cold Reg Sci Technol 21(4):381–397
Zhang J, Makkonen L, He Q (2017) A 2D numerical study on the effect of conductor shape on icing collision efficiency. Cold Reg Sci Technol 143:52–58
WAKAHAMA, G., Experimental studies of snow accretion on electric lines developed in a strong wind. Natural disaster science, 1979. 1(1): p. 21–33.
Langmuir, I. and K. Blodgett, A Mathematical Investigation of Water Droplet Trajectories, Vol. 10. Program Press, 1945. 196: p. 348–355.
Finstad KJ, Lozowski EP, Gates EM (1988) A computational investigation of water droplet trajectories. Journal of atmospheric and oceanic technology 5(1):160–170
Szilder K (2019) Snow accretion prediction on an inclined cable. Cold Reg Sci Technol 157:224–234
Schmidt RA (1980) Threshold Wind-Speeds and Elastic Impact in Snow Transport. J Glaciol 26(94):453–467
Higa M, Arakawa M, Maeno N (1996) Measurements of restitution coefficients of ice at low temperatures. Planet Space Sci 44(9):917–925
Hefny, R., et al., Adhesion of wet snow to different cable surfaces. 2009.
Heil J et al (2020) Relationships between Surface Properties and Snow Adhesion and Its Shedding Mechanisms. Applied Sciences 10(16):5407
Andersson P-O, Jelle BP, Zhang Z (2017) Passive Snow Repulsion: A State-of-the-art Review Illuminating Research Gaps and Possibilities. Energy Procedia 132:423–428
Mohammadian B et al (2020) Delayed Frost Growth on Nanoporous Microstructured Surfaces Utilizing Jumping and Sweeping Condensates. Langmuir 36(24):6611–6858
Namdari N et al (2020) Advanced functional surfaces through controlled damage and instabilities. Materials Horizons 7(2):366–396
Abdelaal, et al., Sensor for Detection and Measurement of Ice, Snow and Liquid Water Content (LWC) and Methods of Using Same (60487-US-PSP). 2019: USA.
Sarayloo, M., A Sensor for Measuring Liquid Water Content of Wet Snow on Superstructures, in Civil and Environmental Engineering (2019) The University of Toledo: Toledo. Ohio, USA
Morsi S, Alexander A (1972) An investigation of particle trajectories in two-phase flow systems. J Fluid Mech 55(2):193–208
Center, O.S. Ohio Supercomputer Center. 1987; Available from: http://osc.edu/ark:/19495/f5s1ph73.
ANSYS, I., ANSYS FLUENT user’s guide. Canonsburg, PA, 2011.
Patankar, S., Numerical heat transfer and fluid flow. 1980: CRC press.
Denoth A (1980) The pendular-funicular liquid transition in snow. J Glaciol 25(91):93–98
Eidevåg T et al (2020) Modeling of dry snow adhesion during normal impact with surfaces. Powder Technol 361:1081–1092
Bartelt, P., et al., Snow Engineering V: Proceedings of the Fifth International Conference on Snow Engineering, 5–8 July 2004, Davos, Switzerland. 2004: CRC Press.
Houghton, E.L. and P.W. Carpenter, Aerodynamics for engineering students. 2003: Elsevier.
Poots, G., Ice and snow accretion on structures. Vol. 10. 1996: Research Studies PressLtd.
Munson BR et al (2006) Fundamentals of fluid mechanics. Wiley, USA
Bergman TL et al (2011) Fundamentals of heat and mass transfer. Wiley, Hoboken
Acknowledgements
The authors thank the Ohio Supercomputer Center for providing the Ansys software.
Funding
This work was supported by the Ford Motor Company.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mohammadian, B., Sarayloo, M., Heil, J. et al. Active prevention of snow accumulation on cameras of autonomous vehicles. SN Appl. Sci. 3, 154 (2021). https://doi.org/10.1007/s42452-020-04106-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-020-04106-x