
Abstract
Purpose
To establish a smart thin plate in which structural health monitoring (SHM) and active vibration control purposes are integrated, the locations of attached piezoelectric ceramic (PZT) actuators as well as their applied normalized voltage are investigated.
Method
Normal strains of such coupled electro-mechanical systems are defined using Kirchoff's classical laminate plate theory (CLPT), and then, by Ritz solution, these normal strains are converted to spatially dependent functions that are employed to define virtual work for the actuators as a function of location and applied voltage. Finally, genetic algorithm (GA)-based iterative optimization is carried out to locate the actuators as well as determine the normalized applied voltage for each of them in the desired modes.
Results
Three plates with different boundary conditions are studied for optimal placement of PZT actuator/s . The PZT actuator/s are optimally placed where the maximum amount of exerted virtual work is reached to fulfil the perfect excitation needed by SHM and provide the highest damping energy for undesired vibration at designated modes. The results show that the optimum location of PZT actuator/s lies where the maximum sum of normal strains is.
Conclusion
The proposed process is valid for any mixed boundary conditions on a thin plate with any number of square actuators with a minimum computational effort, where both location of the actuator/s and applied voltage can be manipulated via GA to achieve the maximum exerted work done by PZT actuator/s at each desired natural mode.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
During the last few decades, smart structures were developed to be effective components for numerous modern structural systems. Nowadays, their applications are not limited to high-tech systems, such as aviation or space ships; they have spread to take part in many activities of our daily life, such as vehicles, infrastructure, building management systems (BMS), etc.
Many definitions have pinpointed the characteristics, functionality, and components of smart structures. One of the most classic definitions classified them as structure components with sensors and actuators embedded in or attached to them, and these actuators/sensors are functioning through a coordinated control system. Thus, the structural component is capable of responding remotely and simultaneously to any external stimuli, giving the desired designated react for such stimuli [1].
The previous definition is obviously declaring the main characteristic of smart structures, which is an organized interaction between mechanical and electronic components to produce elasto-mechanical structural properties. Also, the main target functions of smart structures can be summarized as follows:
-
Structural health monitoring (SHM)
-
Active vibration control
-
Active shape control
-
Active noise control
All these functions need mainly specific components to act properly, which are: structure, sensors, actuators, and control system [2, 3].
Implementation of smart materials for the sake of smart structures functionality opened a new horizon for such systems, which is referred to as their unique coupled abilities that improved smart structure systems to be lighter and more operational.
Piezoelectric material family is one of the most familiar smart material families, whose development has been so impressive lately. One of these smart material various forms for instance, is Lead Zirconium Titanate ceramics (PZT) and Polyvinylidene Fluoride polymers (PVDF). This kind of material introduces an adequate option to permanently place a very small and cheap piece of material in a structure that lasts for its whole working life, providing sustainable stimulation for the substrate structure [1]. Piezoelectric wafer active sensor (PWAS) capabilities gained attention due to their electro-mechanical coupling, which qualifies them as be simultaneous energy transducers from mechanical to electrical energy and vice versa. Hence, it can act as both a sensor and an actuator.
As stated earlier, structural health monitoring (SHM) is one of the smart structures’ main target functions, for which innumerable aspects were placed to guarantee the accepted integrity of the substrate structure [4, 5]. Incorporating PWAS in such a process showed promising capabilities through combining its electromechanical coupling properties with the structure vibration characteristics to detect any possible flaws [6, 7]. So far, plenty of research efforts concerning these field have been made. For instance, Na and Baek [8] have reviewed the most recent topics about electromechanical impedance application in SHM. Jiao et al. [9] summarized the main concepts of PZT use for SHM purposes. Wang et al. [10] designed an effective array system of PZT to reduce flaw detection time. Amin and Salem [7] introduced an integrated SHM system to detect, quantify, and localize presumed different cases of damage using an attached array of PWAS for a thin plate of carbon fiber-epoxy, in which PWASs are used to excite the substrate structure over a designated frequency interval.
On the other hand, vibration control is not a less important issue, especially for the structures subjected to a working environment of noticeable ambient vibrations, which may cause remarkable troubles starting from simple malfunction or inappropriate performance of the structural systems, and up to catastrophic failure disasters [11]. Many researchers have implied vibration control systems in which integrated actuators excite all structural modes of interest at which the structure tends to exhibit destructive behaviour even under low amplitudes of cyclic load [12]. Of course, piezoelectric ceramic was one of the most popular smart materials to be used in such fields, as well as SHM, due to its tremendous advantages [13]. PWASs were used to control the vibrations of cantilevered structures [14,15,16,17], frame structures [18], and plate structures [19, 20].
Hence, the integration of SHM and vibration control systems using the same actuating set simultaneously for thin-walled structures will be compatible with the use of PWASs’ actuators. And so, placing actuators is important deal to achieve an acceptable compromise between the two systems. Besides, several practical limitations may be implied to avoid incompetence in the structural systems, such as weight, space, cost…, etc.
Many aspects have been placed and met success in fulfiling the desired criteria for which PZT actuators were employed [21]. Hać and Liu [22], based on controllability and observability, proposed the application of a system performance index (SPI) for actuators placement. Quek et al. [23] performed discrete direct pattern search optimization based on a controllability model for PZT actuators’ location. He overcame the problem of local maxima by selecting starting points near maxima of integrated normal strains, so that the maximum virtual work of the actuator is obtained. Yang and Zhang [24] discussed the maximization of certain plate model deflection based on PZT actuator location. Mehrabin and Koma [25] developed an optimal actuator positioning method by applying an optimization algorithm to the frequency response function (FRF) of the target system, where FRF is considered an objective function. Zoric et al. [12] presented optimal actuators’ sizes and locations over the first 5 modes of a smart cantilever beam by implementing fuzzy to transform controllability-based multi-objective function and constraints to pseudo-goal function, and hence, applied particle swarm optimization package to achieve the desired goal. Huang et al. [26] established an experimental platform of an aircraft framework to verify the proposed method of actuators and sensors distribution. The comparison between different optimization algorithms showed that the genetic algorithm is more favorable than the particle swarm algorithm for the proposed system’s vibration suppression rate . Tarhini et al. [27] introduced a mixed integer nonlinear approach as an optimization tool to maximize the coverage of presumed control points by allocating PZT wafers at optimal positions. The precision of such an approach was then experimentally validated through some different locations damage scenarios. Liu et al. [28] took advantage of topology optimization technique and assigned SPI as an objective function that has to be maximized to reveal the transformed energy from actuator to structure. The process was fulfilled by topology optimization of the PZT layer for different cases of boundary conditions and natural modes of the smart plates. Based on the analytical Euler–Bernoulli model, Muthalif et al. [29] employed ant colony optimization (ACO) verified with GA and the enumerative method (EM) to estimate proportional integral derivative (PID) controller gains, as well as the location of a single actuator under the influence of a single fixed excitation point for simply supported thin plate over low-frequency range. Optimization is based on minimizing frequency average energy. The optimal values of PZT sensor–actuator position and PID controller gains are verified experimentally.
The present work investigates the optimal placement of PZT actuators on a thin plate to serve both target functions of SHM and vibration control. Since the primary function of actuators in any vibration-based SHM system is to achieve the full excitation of the monitored structure at desired modes [30], the goal function of locating the PZT actuators is to maximize the exerted work done by the actuator. This criterion shall also fulfil the main target of the vibration control which is to overcome any undesired vibration especially at natural frequencies of interest [12, 23, 25] by placing PZT actuators where they can offer maximum work. Quek et al. [23] introduced the exerted work done by PZT actuator/s in order to select the starting point of optimization nearby the maximum strain location. However, they based their discrete optimization objective function on controllability model. In this paper, genetic algorithm (GA) is utilized to perform a continuous optimization problem directly based on the exerted work identified by Wang et al. and Quek et al. [23, 31] rather than to perform a discrete optimization based on controllability principle. In addition to the location of PZT actuator/s, the current research considers the PZT applied voltage as an optimization parameter.
Piezoelectric Constitutive Equations
Due to electro-mechanical coupling exhibited by piezoelectric materials, the conventional mechanical stress–strain relationship of such materials was modified to integrate electrical properties as well and connectivity between them. From Ikeda [32, 33], one of the main forms of 3D piezoelectric constitutive equations showing such coupling is stress–charge form:
The Eq. (1) can be expanded to Eqs. (2) and (3):
For thin plate’s configuration, the normal stress in the thickness direction of the piezoceramic and the related transverse shear stress components are insignificant due to two-dimensional strain variations. [34] i.e \({\sigma }_{23}= {\upsigma }_{13}= {\upsigma }_{33}=0\).
Hence, Eqs. (2) and (3) are reduced to (4) and (5):
where
Analytical Model
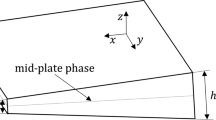
Kirchoff's classical laminate plate theory (CLPT) would be appropriate to simulate deflections and strains for the research object, since the goal study substrate structure is a thin plate (Fig. 1).

Deformation of a transverse normal plane according to classical laminate plate theory [35]
Therefore, the displacement vector \(\left\{ U \right\}\) will be:
Displacements in the main axis directions x, y, and z (u, v, and w respectively) will be:
Hence, according to CLPT, strain–displacement relationships are:
And finally can be summarized in:
Or simply can be written:
For a 2D isotropic thin plate, the stress–strain relationship will be reduced to:
where
Based on Quek et al. [23], virtual work done by surface attached PZT actuator is defined as:
However, PZT is orthotropic material
And:
Substituting Eqs. (6), (21), (23), and (24) in Eq. (22), we can obtain the virtual work done by (n) actuators oriented to principle axes of the substrate:
Ritz Solution Technique
The unknown displacements \({u}_{0}, {v}_{0},\mathrm{ and }{w}_{0}\) are approximated in the Ritz method by x–y-dependent approximation functions or interpolation functions that satisfy the geometric boundary conditions [36].
Therefore, displacements \({u}_{0}, {v}_{0},\mathrm{ and }{w}_{0}\) can be approximated using:
Polynomial type interpolation functions are most widely used, which is handled by assuming adequate polynomial functions Eqs. (26, 27, and 28) for the simulated structure. Applying Ritz solution to CLPT assumptions of displacements (8–11):
Performing the same process to the strains to (12–19):
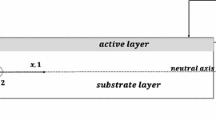
The variational formulas of strain and kinetic energies for the mechanical system composed of the substrate plate of thickness (ts) and (n) actuators of the same thickness (tz) attached to the plate surface Fig. 2, can be expressed as follows:

Configuration of attached PZT actuator to substrate plate
By expanding variational formulas of Eqs. (33) and (34), stiffness and mass will be [37]:
Solving the Eigen value problem for the mechanical system described by Eqs. (35) and (36) yields to the natural frequencies as well as the corresponding modal shape matrices, which can be decomposed into the vector \(\left\{ {q_{i} } \right\}\) used to solve each mode of the extracted modes separately.
Iterative Optimization Process
To position the PZT actuator/s at the location where the virtual work done by them is maximized, initial approach is proceeded by maximizing the work Eq. (25). The function is based on the mechanical system strains (\(\varepsilon_{xx} \;{\text{and}}\;\varepsilon_{yy}\)) obtained initially by neglecting the mass and stiffness of actuators, when the location is initially assigned, actuator location is incorporated in the mechanical system Eqs. (35 and 36). Subsequently, process of maximization is repeated with the strains (\(\varepsilon_{xx} \;{\text{and}}\;\varepsilon_{yy}\)) of PZT mass and stiffness involved in the mechanical system in order to enhance localization tuning of actuators. This optimization process is iterated until convergence of PZT actuator is achieved.
To formulate optimization problem, GA optimization package offered by MATLAB software is performed for the unknown variables \(\left( {Xi,Yi,\varphi i} \right)\), and fitness function (W) obtained from Eq. (25). Population size is set to be 400, generation number is set to be 600, both mutation and crossover functions are set to be constraint-dependent, and both function tolerance and constraint tolerance are set to be zero.
The optimization problem formulation Fig. 3 can be expressed as:
where \(g_{{\left( {j,k} \right)}} \left( {Xi, Yi, \varphi i} \right)\) are \(\left( m \right)\) constraints that avoid overlap between any actuators. However, their numbers are—
where \(Xi\) and \(Yi\) are the coordinates of the ith actuator lower left corner.

Optimization problem configuration
Numerical Examples
To examine the proposed methodology, an aluminum plate of dimensions 30 \(\times\) 50 cm and thickness of 1 cm is assumed to the test sample. The plate has a Young’s modulus (E) of 69 Gpa, density (\(\rho_{s}\)) of 2700 kg/m3 Poisson ratio (\(\nu\)) of 0.33. The specimen is equipped with APC850 4 \(\times\) 4 cm PZT actuator of thickness 1 mm with the properties shown in Table 1.
Three cases of boundary conditions are assumed with single, double, and triple actuators per each boundary condition case, where several mode shapes are studied.
Cantilever Plate
The Ritz polynomials for such case were proposed by Abbas et al. [36] Eqs. (40–42):
The chosen polynomials verify the boundary conditions along the side where x = 0 (\(u_{o} ,v_{o} ,w_{o} ,\frac{{\partial w_{o} }}{\partial x}{\text{and}} \frac{{\partial v_{o} }}{\partial x}\) are equal to zero), Fig. 4a. Also the Eigen problem \(\left( {K,M} \right)\) of the proposed analytical model is solved, and the first four mode shapes as well as their corresponding frequencies are extracted, which are compared to those extracted from a numerical model established by ANSYS 22R1 software. The results shown in Table 2 show good agreement between the proposed model and the numerical one.

Configuration of Ritz problem for: a cantilever plate. b SSSF plate. C SSFF plate
Simple Simple Simple Free (SSSF) Plate
Al-Shugaa et al. [39] studied large deflection of orthotropic thin plates for mixed boundary conditions cases, among them (SSSF) shown in Fig. 4b. Ritz polynomial functions were introduced and verified to simulate the deflection of the aforementioned plate using Eqs. (43–45).
Mode shapes of interest as well as their corresponding frequencies are obtained by solving Eigen problem \(\left( {K,M} \right)\), and then compared with numerical model developed with Ansys 22R1 where acceptable agreement was established. Table 3 presents the desired shape modes for both analytical and numerical models as well as their corresponding frequencies.
Simple Simple Free Free (SSFF) Plate
This special case shown in Fig. 4c was introduced by many researchers, in order to present more diverse conditional boundary cases for deflection and vibration analysis of thin plates, such as Lopatin and Morozov [40], Pouladkhan et al. [41], etc. The trial polynomial required to satisfy the boundary conditions of such case along the side where x = 0 (\(\;v_{o} ,w_{o} \;{\text{and}}\;\frac{{\partial w_{o} }}{\partial y} { }\) are equal to zero), and along the side where y = 0 (\(u_{o} ,w_{o} {\text{and}}\frac{{\partial w_{o} }}{\partial x}\) are equal to zero), is found to be
Modal analysis is used to extract the first three mode shapes of proposed analytical model and their corresponding natural frequencies as well. The results are compared to numerical model established in ANSYS 22R1 software. The comparison shows good between the two models. Table 4 presents the comparison between analytical and numerical shape modes of such boundary condition case and their natural frequencies as well.
Results and Discussion
The results of iterative GA-based optimization are summarized in the Tables 5, 6, and 7 in which the coordinates \(\left( {X_{i} ,Y_{i} } \right)\) of each actuator as shown in Fig. 3 are obtained in addition to the normalized volt acting on each actuator where the + ve sign denotes the voltage in same direction of the actuator polarity and the –ve sign denotes the voltage of opposite direction. Also, the actuators optimum locations are graphically dropped on the distribution diagram for the summation of strains in the x and y directions to show the relation between the strain and optimum location of actuators. The voltage load of the same polarity as the actuator poling voltage is assigned with black color border, while the voltage load of the opposite polarity is assigned with white border, Figs. 5, 6, 7, 8, 9, 10, 11, 12, 13, 14

Strains distribution of cantilever plate at 1st mode: a single actuator b double actuators c triple actuators

Strains distribution of cantilever plate at 2nd mode: a single actuator b double actuators c triple actuators

Strains distribution of cantilever plate at 3rd mode: a single actuator b double actuators c triple actuators

Strains distribution of cantilever plate at 4th mode: a single actuator b double actuators c triple actuators

Strains distribution of SSSF plate at 1st mode: a single actuator b double actuators c triple actuators

Strains distribution of SSSF plate at 2nd mode: a single actuator b double actuators c triple actuators

Strains distribution of SSSF plate at 3rd mode: a single actuator b double actuators c triple actuators

Strains distribution of (SSFF) plate at 1st mode: a single actuator b double actuators c triple actuators

Strains distribution of (SSFF) plate at 2nd mode: a single actuator b double actuators c triple actuators

Strains distribution of (SSFF) plate at 3rd mode: a single actuator b double actuators c triple actuators
It is worth telling that in the case of using odd number of actuators (single and triple actuators) for cantilever plate at 3rd mode, the optimum location kept altering between the two corners adjacent to the clamping side which is referred to symmetric concentration of the maximum strains at the both corners. So, locating of the actuator at any of them will give the same result. While, the axisymmetric distribution of strains led to equal amount of exerted work at the end corners, but with different sign when single and double actuators are used for the 2nd and 4th modes. Meanwhile, when three actuators are used at the 4th mode, the third actuator location doesn’t alter between the end corners; it is optimally placed at the shown strain peak that is arisen due to the configuration of the mode shape.
A very little variation in the distribution of normal strains as well as their values is noticed when the number of actuators is changed for some cases which is referred to the actuators mass and stiffness incorporated in the mechanical system. Another remarkable notice in Fig. 8b, where the actuators are optimally located in the vicinity of maximum strain points (not directly above them), happened because the integration of the normal strains with respect to the actuator area is the main effective component of the virtual work (i.e. the change of the size of actuator can lightly change its location).
Conclusion
Ritz polynomial functions solution is involved in CPLT to define the normal strains for a thin plate equipped with square PZT actuator/s with mixed boundary conditions. Hence, the virtual work done by the PZT actuator/s is expressed as a function of location and applied voltage. GA-based iterative optimization is used to achieve convergence of the optimum actuator/s location, as well as the value of the normalized voltage via simple and rapid steps. To precisely incorporate the effect of the mass and stiffness of PZT actuator/s and their location on the observed natural mode frequencies, an iterative optimization approach has been introduced. The results are compatible with those obtained by Quek et al. [23] optimization of controllability model for PZT actuators’ location. By implying real-value voltage in the operating limits of PZT with respect to optimum normalized voltage, the value of exerted virtual work can be increased. This process is valid for any mixed boundary conditions thin plate with any number of square actuators with a minimum computational effort.
References
Anderson GL, Crowson A, Chandra J (1992) Introuduction to smart structures. In: Tzou HS, Anderson L (ed) Inellegent structural systems. Kluwer Academic Publishers
Sinapius JM (2020) Introduction. In: Sinapius JM, (ed) Adaptronics—smart structures and materials. Springer, Berlin
Shivashankar P, Gopalakrishnan S (2020) Review on the use of piezoelectric materials for active vibration, noise, and flow control. Smart Mater Struct 29(5):053001
Armer GST (1992) Intorduction. In: Moore JFA (ed) Monitoring Building Structures. Blackie and Son Ltd
Moore JFA (2003) Monitoring building structures
Park G, Farrar CR (2009) Piezoelectric impedance methods for damage detection and sensor validation in Encyclopedia of structural health monitriong. In: Boller C, Chang FK, Funjino Y (Eds). Wiley, 365–377
Amin Abdelzaher MS, Salem MA (2020) An integrated algorithm for structural health monitoring of composite plate using electromechanical impedance. J Eng Sci Milit Technol 4(1):127–141
Na WS, Baek J (2018) A review of the piezoelectric electromechanical impedance based structural health monitoring technique for engineering structures. Sensors 18(5):1307
Jiao P et al (2020) Piezoelectric sensing techniques in structural health monitoring: a state-of-the-art review. Sensors 20(13):3730
Wang Y et al (2020) A piezoelectric sensor network with shared signal transmission wires for structural health monitoring of aircraft smart skin. Mech Syst Signal Process 141:106730
Worden K, Bullough WA, Haywood J (2003) Smart technologies. World Scientific.
Zorić ND et al (2013) Optimal vibration control of smart composite beams with optimal size and location of piezoelectric sensing and actuation. J Intell Mater Syst Struct 24(4):499–526
Song G, Sethi V, Li H-N (2006) Vibration control of civil structures using piezoceramic smart materials: a review. Eng Struct 28(11):1513–1524
Abreu GL et al (2012) System identification and active vibration control of a flexible structure. J Braz Soc Mech Sci Eng 34(2):386–392
Orszulik RR, Shan J (2012) Active vibration control using genetic algorithm-based system identification and positive position feedback. Smart Mater Struct 21(5):055002
Saad MS, Jamaluddin H, Darus IZM (2015) Active vibration control of a flexible beam using system identification and controller tuning by evolutionary algorithm. J Vib Control 21(10):2027–2042
Kassem M et al (2020) Active dynamic vibration absorber for flutter suppression. J Sound Vib 469:115110
Sethi V, Song G (2005) Optimal vibration control of a model frame structure using piezoceramic sensors and actuators. J Vib Control 11(5):671–684
Pu Y, Zhou H, Meng Z (2019) Multi-channel adaptive active vibration control of piezoelectric smart plate with online secondary path modelling using PZT patches. Mech Syst Signal Process 120:166–179
Lin C-Y, Jheng H-W (2017) Active vibration suppression of a motor-driven piezoelectric smart structure using adaptive fuzzy sliding mode control and repetitive control. Appl Sci 7(3):240
Gupta V, Sharma M, Thakur N (2010) Optimization criteria for optimal placement of piezoelectric sensors and actuators on a smart structure: a technical review. J Intell Mater Syst Struct 21(12):1227–1243
Hać A, Liu L (1993) Sensor and actuator location in motion control of flexible structures. J Sound Vib 167(2):239–261
Quek S, Wang S, Ang K (2003) Vibration control of composite plates via optimal placement of piezoelectric patches. J Intell Mater Syst Struct 14(4–5):229–245
Yang Y, Zhang L (2006) Optimal excitation of a rectangular plate resting on an elastic foundation by a piezoelectric actuator. Smart Mater Struct 15(4):1063
Mehrabian AR, Yousefi-Koma A (2011) A novel technique for optimal placement of piezoelectric actuators on smart structures. J Franklin Inst 348(1):12–23
Huang Q et al (2017) Optimal piezoelectric actuators and sensors configuration for vibration suppression of aircraft framework using particle swarm algorithm. Math Prob Eng 2017:1–11
Tarhini H et al (2018) Optimization of piezoelectric wafer placement for structural health-monitoring applications. J Intell Mater Syst Struct 29(19):3758–3773
Liu Y, Wang X, Li Y (2020) Distributed piezoelectric actuator layout-design for active vibration control of thin-walled smart structures. Thin Wall Struct 147:106530
Muthalif AG et al (2021) Optimization of piezoelectric sensor-actuator for plate vibration control using evolutionary computation: modeling, simulation and experimentation. IEEE Access 9:100725–100734
Amin M (2022) An integrated vibration based structural health monitoring system. In: Department of Civil and Environmental Engineering. Carleton University, Ottawa
Wang S, Quek S, Ang K (2001) Vibration control of smart piezoelectric composite plates. Smart Mater Struct 10(4):637
Inc, I.E.E.E., IEEE Standard on Piezoelectricity. 1987: 345 East 47th Street, New York, NY 10017, USA.
Ikeda T (1996) Fundamentals of piezoelectricity. Oxford University Press, New York
Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley
Reddy J (2004) Mechanics of laminated composite plates and shells, conservative. CRC Press, New York
Abbas MK, Elshafei MA, Negm HM (2013) Modeling and analysis of laminated composite plate using modified higher order shear deformation theory. In: International Conference on Aerospace Sciences and Aviation Technology. 2013. The Military Technical College.
Elshafei MA, Alraiess F (2013) Modeling and analysis of smart piezoelectric beams using simple higher order shear deformation theory. IOPscience 22:035006
APC International L (2015) Physical and Piezoelectric Properties of APC Materials. Available from: https://www.americanpiezo.com/apc-materials/physical-piezoelectric-properties.html.
Al-Shugaa MA, Al-Gahtani HJ, Musa AE (2020) Ritz method for large deflection of orthotropic thin plates with mixed boundary conditions. J Appl Math Comput Mech 19(2):5–16
Lopatin A, Morozov E (2009) Buckling of the SSFF rectangular orthotropic plate under in-plane pure bending. Compos Struct 90(3):287–294
Pouladkhan A, Foroushani MY, Mortazavi A (2014) Numerical investigation of poling vector angle on adaptive sandwich plate deflection. J Mech Mechatron Eng 8(5):856–865
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). No funding was received to assist with the preparation of this manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: A Nomenclature
Appendix: A Nomenclature
\(\sigma\) | Stress |
\(D\) | Electric displacement |
\(c^{E}\) | Stiffness at fixed field |
\({\text{e}}\) | Piezoelectric stress constant |
\(\varepsilon\) | Strain |
\(\left\{ E \right\}\) | Electric field vector |
\(\left[ Q \right]\) | Reduced stiffness matrix |
\(d\) | Piezoelectric strain constant |
\(\in^{S}\) | Permittivity at fixed strain |
\(\left\{ U \right\}\) | Displacement vector |
\(\left\{ {U^{o} } \right\}\) | Displacement vector at mid-plane |
\(u,v,w\) | Displacements in directions x, y and z, respectively |
\(E_{1} ,E_{2} ,E_{3}\) | Young's moduli in directions x, y and z, respectively |
\(G_{12} ,G_{13} ,G_{23}\) | Shear moduli |
\(\nu_{12} ,\nu_{13} \nu_{23}\) | Poisson ratios |
\(W\) | Virtual work |
\(\varphi\) | Applied potential |
\(\overline{m},\overline{n}\) | Transformation matrices |
\(\overline{\psi }\) | Actuator contact surface area |
\(a_{1} ,a_{2} ,a_{3}\) | Ritz polynomials vectors in directions x, y and z, respectively |
\(q_{1} ,q_{2} ,q_{3}\) | Ritz numerical coefficients in directions x, y and z, respectively |
\(V\) | Strain energy |
\(T\) | Kinetic energy |
\(K\) | Stiffness matrix of the system |
\(M\) | Mass matrix of the system |
\(\rho_{S} ,\rho_{z}\) | Density of substrate structure and actuator, respectively |
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Salem, M.A.M., Kassem, M., Amin, M.S. et al. Energy-Based Optimal Placement of Piezoelectric Actuator on Smart Thin Plate. J. Vib. Eng. Technol. 12, 1813–1830 (2024). https://doi.org/10.1007/s42417-023-00944-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-023-00944-2