
Abstract
Background
In the existing literature, the dynamic characteristics of the spinning shaft-disk systems are usually evaluated using the transfer matrix method (TMM), the finite element method (FEM) or the differential quadrature method (DQM).
Purpose
The results of the above-mentioned TMM, FEM or DQM are the approximate solutions and the exact solution concerned is rare. For this reason, this paper aims at presenting an analytical method to yield the exact whirling speeds and mode shapes of a “multi-span” continuous shaft mounted by arbitrary rigid disks.
Method
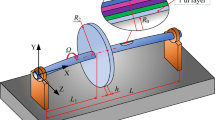
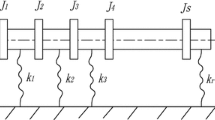
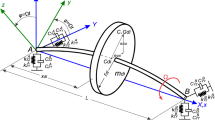
In theory, the whirling motion of a rotating shaft-disk system is three-dimensional (3-D), however, if the transverse displacement in the vertical principal xy-plane and that in the horizontal principal xz-plane for the cross-section of the rotating shaft located at axial coordinate x are combined using a complex number, and the effects of each rigid disk i mounted on the shaft are replaced by a lumped mass together with a frequency-dependent “equivalent” mass moment of inertia, then the whirling motion of a rotating shaft-disk system will be similar to the two-dimensional (2-D) transverse free vibration of a stationary beam. After the foregoing manipulations, the techniques for the free vibrations of a stationary beam carrying various concentrated elements (including the intermediate supports) will be available for the whirling motions of a rotating “multi-span” shaft mounted by arbitrary rigid disks.
Results and Conclusions
To confirm the reliability of presented theory and developed computer programs, most results obtained from the presented method are compared with the available literature or the results of FEM and good agreements are achieved. The presented method has the following merits: (a) The complicated 3-D whirling motions of a rotating shaft can be solved with the approaches for the simple 2-D free vibrations of a stationary beam, so that much computer time can be saved. (b) The damping matrix is eliminated so that the computer programming is easier. (c) The obtained results are the “exact” solutions and may be the benchmark for evaluating the accuracy of the other approximate methods.

















Similar content being viewed by others
References
Prohl MA (1945) A general method for calculating critical speeds of flexible rotors. ASME J Appl Mech 12:142–148
Holzer H (1921) Analysis of torsional vibration. Springer, Berlin
Myklestad NO (1944) A new method of calculating natural modes of uncoupled bending vibration of airplane wings and other types of beams. J Aero Sci 11:153–162
Green RB (1948) Gyroscopic effects on the critical speeds of flexible rotors. ASME J Appl Mech 15:369–376
Colomb M, Rosenberg RM (1951) Critical speeds of uniform shafts under axial torque. In: Proc. First U.S. National Congress of Applied Mechanics. New York, pp 103–110
Eshleman RL, Eubanks RA (1967) On the critical speeds of a continuous shaft-disk system. ASME J Eng Ind 89:645–652
Eshleman RL, Eubanks RA (1969) On the critical speeds of a continuous rotor. ASME J Eng Ind 91:1180–1188
Filipich CP, Rosales MB (1990) Free flexural-torsional vibrations of a spinning beam. J Sound Vib 141(3):375–387
Firoozian R, Zhu H (1991) A hybrid method for the vibration analysis of rotor-bearing systems. J Mech Eng Sci (Part C) 25:131–137
Zu WZ, Han PS (1992) Natural frequencies and normal modes of a spin Timoshenko beam with general boundary conditions. ASME J Appl Mech 59:197–204
Han PS, Zu WZ (1993) Analytical dynamics of a spinning Timoshenko beam subjected to a moving load. J Frankl Inst 330(1):113–129
Nelson HD, McVaugh JM (1976) The dynamics of rotor-bearing systems using finite elements. ASME J Eng Ind 98:593–600
Nelson HD (1980) A finite rotating shaft element using Timoshenko beam theory. J Mech Design 102:793–803
Raffa FA, Vatta F (1999) Gyroscopic effects analysis in the Lagrangian formulation of rotating beams. Meccanica 34:357–366
Yamamoto T, Ishida Y (2001) Linear and nonlinear rotordynamics: a modern treatment with applications (Wiley Series in Nonlinear Science). Wiley, New York
Wu JS, Lin FT, Shaw HJ (2014) Analytical solution for whirling speeds and mode shapes of a distributed-mass shaft with arbitrary rigid disks. ASME J Appl Mech 81:034503-1-034503–10
Rahaghi MI, Mohebbi A, Afshari H (2016) Longitudinal-torsional and two plane transverse vibrations of a composite Timoshenko rotor. J Solid Mech 8(2):418–434
Torabi K, Afshari H (2016) Exact solution for whirling analysis of axial-loaded Timoshenko rotor using basic functions. Eng Solid Mech 4:97–108
Torabi K, Afshari H, Najafi H (2017) Whirling analysis of axial-loaded multi-step Timoshenko rotor carrying concentrated masses. J Solid Mech 9(1):138–156
Afshari H, Rani Rahaghi MI (2018) Whirling analysis of multi-span multi-stepped rotating shafts. J Braz Soci Mech Sci Eng 40:1–17 (Article No. 424)
AL-Shudeifat MA, (2019) New backward whirl phenomenon in intact and cracked rotor systems. J Sound Vib 443:124–138
Huang Y, Wang T, Zhao Y, Wang P (2018) Effects of axially functionally graded material on whirling frequencies and critical speeds of a spinning Timoshenko beam. Compos Struct 192:355–367
She H, Li C, Tang Q, Wen B (2018) The investigation of the coupled vibration in a flexible-disk blades system considering the influence of shaft bending vibration. Mech Syst Signal Process 111:545–569
Heydari H, Khorram A (2019) Effects of location and aspect ratio of a flexible disk on natural frequencies and critical speeds of a rotating shaft-disk system. Int J Mech Sci 152:596–612
De F, Sorrentino S (2019) On the dynamic behaviour of rotating shafts under combined axial and torsional loads. Meccanica 54(7):1029–1055
Zhang Y, Yang X, Zhang W (2020) Modeling and stability analysis of a flexible rotor based on the Timoshenko beam theory. Acta Mech Solida Sin 33:281–293. https://doi.org/10.1007/s10338-019-00146-y
Liu WH, Huang CC (1988) Vibrations of a constrained beam carrying a heavy tip body. J Sound Vib 123:15–29
Lin HY (2008) Dynamic analysis of a multi-span uniform beam carrying a number of various concentrated elements. J Sound Vib 309:262–275
Wu JS, Chen YC (2011) Out-of-plane free vibrations of a horizontal circular curved beam carrying arbitrary sets of concentrated elements. ASCE J Struct Eng 137:220–241
Wu JS, Chang BH (2013) Free vibration of axial-loaded multi-step Timoshenko beam carrying arbitrary concentrated elements using continuous-mass transfer matrix method. Eur J Mech A Solids 38:20–37
Przemieniecki JS (1968) Theory of matrix structural analysis. McGraw-Hill, New York
Carnahan B, Luther HA, Wilkes JO (1969) Applied numerical methods. Wiley, New York
Acknowledgements
This paper is part of the project with contract no. MOST 108-2221-E-006-093. The financial support of the MOST, Republic of China, is highly appreciated.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
On behalf of all the authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Non-zero coefficients for the matrix \([H]_{{\overline{n} \times \overline{n}}}\) appearing in Eq. (42)
Appendix: Non-zero coefficients for the matrix \([H]_{{\overline{n} \times \overline{n}}}\) appearing in Eq. (42)
If the two ends of the shafting system shown in Fig. 1 is supported by ball bearings [with the pinned–pinned (P-P) BC’s], then the non-zero coefficients for the matrix \([H]_{{\overline{n} \times \overline{n}}}\) appearing in Eq. (42) may be obtained from Eqs. (36a, b), (24a, b) and (25a, b), (30a, b) and (31a, b) or Eq. (32), and (37a, b), respectively, as follows:
For the Left Pinned End at Node 0
From Eq. (36a, b) one obtains,
For the Intermediate Node i (with Total Number of Shaft Segments \(n \ge 2\) )
If the intermediate node i is occupied by a disk, then from Eqs. (24a, b) and (25a, b) one obtains,
However, if the intermediate node i is occupied by a rigid pinned support, then from Eqs. (30a, b) and (31a, b) or Eq. (32) one obtains
For the Right Pinned End at Node n
From Eqs. (37a, b) one obtains
Rights and permissions
About this article

Cite this article
Wu, JS., Sheu, JJ. An Exact Solution for Whirling Speeds and Mode Shapes of Multi-span Rotating Shafts with Each Span Carrying a Number of Rigid Disks. J. Vib. Eng. Technol. 10, 149–174 (2022). https://doi.org/10.1007/s42417-021-00369-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-021-00369-9