
Abstract
Objective
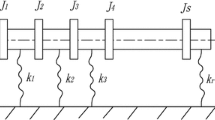
The present work adopted damped vibration absorbers (DVAs) to attenuate multi-mode longitudinal vibration of the hollow shaft. The dynamic behavior of a shaft is analyzed for the guidance to the initial parameter design of DVAs and the parameters of DVAs are optimized. Subsequently, specific structures of DVAs are designed taking into account the hollow characteristic of the shaft. Furthermore, finite element stimulation of solid modeling has been performed.
Methods
In this work, with the aid of the transfer matrix method (TMM) in conjunction with the substructure synthesis method (SSM), a dynamic model of the shaft incorporating multiple DVAs is established. The proposed method is developed for the calculation of dynamics character of the coupled system and estimation of absorption effectiveness of DVAs.
Simulation
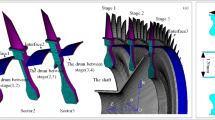
To demonstrate the validity of theoretical result obtained from the TMM proposed in this paper, a simulation of the shaft vibration by means of the finite element method (FEM) is also carried out.
Conclusion
Theoretical and stimulation results both demonstrate that the resonance peaks of the shaft longitudinal vibration are suppressed obviously with the application of those DVAs, which verify the effectiveness of the absorption performance of DVAs.












Similar content being viewed by others

References
Pan J, Farag N, Lin T, Juniper R (2002) Propeller induced structural vibration through the thrust bearing. In: Proceedings of innovation in acoustics and vibration annual conference of the Australian Acoustical Society, Adelaide
Spivack OR, Kinns R, Peake N (2004) Acoustic excitation of hull surfaces by propeller sources. J Mar Sci Tech 9:109–116
Caresta M, Kessissoglou NJ (2010) Acoustic signature of a submarine hull under harmonic excitation. Appl Acoust 71:17–31
Merz S, Kessissoglou NJ, Kinns R (2007) Excitation of a submarine hull by propeller forces. In: Proceedings of the 14th international congress on sound and vibration, Cairns
Merz S, Kinns R, Kessissoglou NJ (2009) Structural and acoustic responses of a submarine hull due to propeller forces. J Sound Vib 325:266–286
Goodwin AJH (1960) The design of a resonance changer to overcome excessive axial vibration of propeller shafting. Inst Mar Eng Trans 72:37–63
Dylejko PG, Kessissoglou NJ (2004) Minimization of the vibration transmission through the propeller-shafting system in a submarine. J Acoust Soc Am 116:25–69
Dylejko PG, Kessissoglou NJ, Tso Y, Norwood CJ (2007) Optimization of a resonance changer to minimize the vibration transmission in marine vessels. J Sound Vib 300:101–116
Dylejko PG (2007) Optimum resonance changer for submerged vessel signature reduction. PhD thesis, University of New South Wales, Sydney
Merz S (2010) Passive and active tunning of a resonance changer for submarine signature reduction. PhD thesis, University of New South Wales, Sydney
Merz S, Kessissoglou NJ, Kinns R, Marburg S (2010) Minimization of the sound power radiated by a submarine through optimization of its resonance changer. J Sound Vib 329:980–993
Jacquot R (2001) Suppression of random vibrations in plates using vibration absorbers. J Sound Vib 248:585–596
Cuvalci O, Ertas A (1996) Pendulum as vibration absorber for flexible structures: experiments and theory. J Vib Acoust 118:558–566
Yau J (2007) Train-induced vibration control of simple beams using string-type tuned mass dampers. J Mech 23:329–340
Yilmaz C, Kikuchi N (2006) Analysis and design of passive band-stop filter-type vibration isolators for low-frequency applications. J Sound Vib 291:1004–1028
Bartnicki J, Pater Z (2005) Numerical simulation of three-rolls cross-wedge rolling of hollowed shaft. J Mater Process Tech 164–165:1154–1159
Zhou R, Jiang Y, Guan WS (2011) Calculation method of ship propulsion shafting longitudinal vibration and influencing factors. Chin J Ship Res 6:17–22
Acar MA, Yilmaz C (2013) Design of an adaptive–passive dynamic vibration absorber composed of a string–mass system equipped with negative stiffness tension adjusting mechanism. J Sound Vib 332:231–245
Ernst FG (1974) Rubber springs design. Wiley, London
Den Hartog JP (1985) Mechanical vibrations. Dover Publications, New York
Ashory MR, Najafi M, Jamshidi E (2012) Optimal design of a damped vibration absorber using genetic algorithm. Adv Vib Eng 11(1):47–58
Xu ZB, Gong XL, Chen XM (2011) Development of a mechanical semi-active vibration absorber. Adv Vib Eng 10(3):229–238
Acknowledgement
This work was supported by the Fundamental Research Funds for the Central Universities and Funding of Jiangsu Innovation Program for Graduate Education (Grant No. KYLX_0242) and a project funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The transfer matrices of various elements in Sect. 3 are given as
Rights and permissions
About this article

Cite this article
Zhao, S., Chen, Q. & Yao, B. Damped Vibration Absorbers for Multi-mode Longitudinal Vibration Control of a Hollow Shaft. J. Vib. Eng. Technol. 6, 1–12 (2018). https://doi.org/10.1007/s42417-018-0002-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-018-0002-y