
Abstract
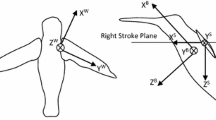
The attitude control system of a flapping-wing flying robot plays an important role in the precise orientation and tracking of the robot. In this paper, the modeling of a bird-like micro flapping-wing system is introduced, and the design of a sliding mode controller based on an Extended State Observer (ESO) is described. The main design difficulties are the control law and the adaptive law for the attitude control system. To address this problem, a sliding mode adaptive extended state observer algorithm is proposed. Firstly, a new extended state approximation method is used to estimate the final output as a disturbance state. Then, a sliding mode observer with good robustness to the model approximation error and external disturbance is used to estimate the system state. Compared with traditional algorithms, this method is not only suitable for more general cases, but also effectively reduces the influence of the approximation error and interference. Next, the simulation and experiment example is given to illustrate the implementation process. The results show that the algorithm can effectively estimate the state of the attitude control system of the flapping-wing flying robot, and further guarantee the robustness of the model regarding error and external disturbance.
Similar content being viewed by others

References
Zhou C. Research on Nonlinear Control Method of Aircraft Attitude, PhD thesis, Harbin Institute of Technology, Harbin, China, 2016. (in Chinese)
Duan H, Shi X. Modeling and Control of Micro Air Vehicle, Science Press, Beijing, China, 2012, 89–110. (in Chinese)
Phan H V, Aurecianus S, Kang T, Park H C. KUBeetle-S: An insect-like, tailless, hover-capable robot that can fly with a low-torque control mechanism. International Journal of Micro Air Vehicles, 2019, 11, UNSP 1756829319861371.
Nguyen Q V, Chan W L. Development and flight performance of a biologically-inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation. Bioinspiration & Biomimetics, 2018, 14, 016015.
Au L T K, Phan V H, Park H C. Longitudinal flight dynamic analysis on vertical takeoff of a tailless flapping-wing micro air vehicle. Journal of Bionic Engineering, 2018, 15, 283–297.
Duan H. Flight Attitude Control of MAV, Harbin Institute of Technology, PhD thesis, Harbin, China, 2007. (in Chinese)
He W, Zhang S. Control design for nonlinear flexible wings of a robotic aircraft. IEEE Transactions on Control Systems Technology, 2017, 25, 351–357.
He W, Mu X X, Chen Y N, He X Y, Yu Y. Modeling and vibration control of the flapping-wing robotic aircraft with output constraint. Journal of Sound and Vibration, 2018, 423, 472–483.
Bialy B J, Chakraborty I, Cekic S C, Dixon W E. Adaptive boundary control of store induced oscillations in a flexible aircraft wing. Automatica, 2016, 70, 230–238.
Paranjape A A, Guan J Y, Chung S J, Krstic M. PDE boundary control for flexible articulated wings on a robotic aircraft. IEEE Transactions on Robotics, 2013, 29, 625–640.
Kumar D, Mohite P M, Kamle S. Dragonfly inspired nanocomposite flapping wing for micro air vehicles. Journal of Bionic Engineering, 2019, 16, 894–903.
Han J Q. ADRC technology. Frontier Science, 2007, 1, 24–31.
Han J Q. Active Disturbance Rejection Control Technology for Estimating Compensation Uncertainty, National Defense Industry Press, Beijing, China, 2008, 79–92. (in Chinese)
Han J Q. From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 2009, 56, 900–906.
Song B, Yan G T, Li B. High-precision pointing control of flexible spacecraft based on ADRC technology. Shanghai Aerospace, 2014, 31, 1–7. (in Chinese)
Yang H J, Guo M C, Xia Y Q, Sun Z Q. Dual closed-loop tracking control for wheeled mobile robots via active disturbance rejection control and model predictive control. International Journal of Robust and Nonlinear Control, 2020, 30, 80–99.
Dong Y F, Ren T Y, Wu D, Chen K. Compliance control for robot manipulation in contact with a varied environment based on a new joint torque controller. Journal of Intelligent & Robotic Systems, 2020, https://doi.org/10.1007/s10846-019-01109-8
Pukdeboon C. Extended state observer-based third-order sliding mode finite-time attitude tracking controller for rigid spacecraft. Science China. Information Sciences, 2019, 62, 012206.
Madonski R, Shao S, Zhang H, Gao Z, Yang J, Li S. General error-based active disturbance rejection control for swift industrial implementations. Control Engineering Practice, 2019, 84, 218–229.
Prasad S, Purwar S, Kishor N. Load frequency regulation using observer based non-linear sliding mode control. International Journal of Electrical Power & Energy Systems, 2019, 104, 178–193.
Wang X B, Wu Z. Attitude sliding mode variable structure control of flexible satellite based on disturbance observer. Space Control Technology and Application, 2017, 2, 75–81.
Umar A, Shi Z Q, Khlil A, Farouk Z I B. Developing a new robust swarm-based algorithm for robot analysis. Mathematics, 2020, 8, 158.
Li H, He G P, Bi F G. Sliding-mode adaptive attitude controller design for flapping-wing micro air vehicle. Aerospace Control and Application, 2018, 44, 81–88.
Miklosovic R, Radke A, Gao Z. Discrete implementation and generalization of the extended state observer. American Control Conference, Minneapolis, USA, 2006.
Acknowledgment
This study was supported by the project of National Natural Science Foundation of China (Grant No. 61703390), and Anhui Natural Science Foundation (Grant No. 1808085QF193), and Pre-research Union Fund of China Ministry of Education & PLA Equipment Development Department (Grant No. 6141A02033616) and Sichuan Gas Turbine Establishment of Aero Engine Corporation of China (Grant No. SHYS-2019-0004). The authors appreciate the comments and valuable suggestions of anonymous referees and editors for improving the quality of the manuscript.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Bai, K., Luo, Y., Dan, Z. et al. Extended State Observer based Attitude Control of a Bird-like Flapping-wing Flying Robot. J Bionic Eng 17, 708–717 (2020). https://doi.org/10.1007/s42235-020-0063-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-020-0063-y