
Abstract
The fuel cell hybrid powertrain is a potential power supply system for fuel cell vehicles. The underlying problem is that the fuel cell vehicles encounter exhaustive hydrogen consumption. To effectively manage hydrogen consumption, the aim is to propose fuel cell city bus power and control system. The underlying idea is to determine the target power of fuel cell through simulation study on fuel cell and battery energy management strategy and road test verifications. A half-power prediction energy management strategy is implemented to predict the target power of the fuel cell in the current time step based on the demand power of the vehicle and the state of charge (SOC) of the battery in the previous time steps. This offers better understanding of the correlation between fuel cell power and vehicle drive cycle for enabling effective power supply management. The research results show that the half-power prediction energy management strategy effectively reduces the hydrogen consumption of the vehicle by 7.1% and the number of battery cycle by 6.0%, compared to the stepped management strategy of battery SOC. When applied to a 12-m fuel cell city bus—F12, specially designed and manufactured for the Winter Olympic Games in 2022—the fuel economy of 3.7 kg/100 km is achieved in urban road conditions. This study lays a foundation for providing the powertrain configuration and energy management strategy of fuel cell city bus.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Fuel cell vehicles [1,2,3,4] are one of the most important technical routes for new energy vehicles because of their zero-emission, long cycle life, and high operating convenience. In order to realize “Green Olympics,” hydrogen fuel cell vehicles are mainly used in the competition area of Zhangjiakou, Hebei Province, China, to reduce carbon emissions in the 2022 Beijing Winter Olympics. The inherent characteristics of fuel cells such as the inability to recover regenerative braking energy, poor reliability, slow dynamic performance response, and high cost [5,6,7,8] are undesirable. These undesirable characteristics can be compensated by batteries even though the driving range is relatively short. Consequently, the hybrid power system technology consisting of fuel cell and battery is becoming a new direction for the development of fuel cell vehicles [9]. The current power system structure for fuel cell vehicles mainly includes: (1) fuel cell and battery, (2) fuel cell and supercapacitor, and (3) fuel cell, battery, and supercapacitor [10, 11]. For the hybrid power system of fuel cell and battery, if the power output from the fuel cell of the vehicle is too high during power distribution, operating it in the overload state leads to a higher economic cost. Consequently, the performance of the fuel cell system will gradually decline. If the power output from the battery is too high, the fuel cell system will be in a light-load state, affecting the overall performance of the vehicle. Therefore, a reasonable energy management strategy needs to be selected to allocate the output power of the fuel cell system and battery in accordance with the actual demand of the vehicle. And the energy management strategy is a crucial technology for improving fuel economy and has a significant impact on different parameters including the fuel cell system lifetime, battery lifetime, and fuel economy [12,13,14,15]. Several researchers have studied energy management strategies for improving the performance of the drive system. For example, Gao et al. [16] developed an overall control strategy for the fuel cell-powered hybrid vehicle drive train, which enables the fuel cell system to meet the motor power requirements, maintain its power supply capability and allow the storage battery to allocate energy accordingly. Ahn et al. [17] proposed a fuzzy logic-based power control strategy for a fuel cell hybrid electric vehicle to improve fuel economy while maintaining the battery SOC. Li et al. [18] proposed an energy management strategy based on the T-S fuzzy method for fuel economy, and the results showed that the strategy outperformed the power-following control strategy in terms of overall system efficiency. Hu et al. [19] presented a real-time multi-objective optimization protocol for powertrain systems of a passenger car and showed that the power demand-based control method was more suitable for powertrain systems equipped with larger capacity batteries.
Based on the abovementioned studies, this paper focuses on the effect of various energy management strategies on fuel economy regarding the fuel cell system and battery performance. A half-power prediction energy management strategy is proposed to predict the target power of the fuel cell in the current control cycle based on the demand power of the vehicle and the battery SOC in the previous control cycle. In the current control cycle, the power generation of the fuel cell refers to the target power output and remains unchanged. The proposed energy management strategy can reduce fuel consumption and alleviate the attenuation of fuel cell.
The paper is structured as follows. Section 2 explains the hybrid powertrain and energy management strategy. Section 3 details the simulation results of different control strategies. Section 4 gives the results of the road testing and discusses the fuel economy of the vehicle. Section 5 concludes the paper.
2 Power System Configuration and Energy Management Strategy
The proton exchange membrane fuel cell hybrid powertrain is shown in Fig. 1. The fuel cell system is connected to the bus via a unidirectional DC/DC converter, whereas the battery is directly connected in order to maintain the bus voltage. The power of fuel cell system needs to be higher than the average power in the vehicle driving cycle to satisfy the energy demand. The battery is sufficient to satisfy dynamic load demands in vehicular applications. This configuration can achieve higher energy density and power density simultaneously. In addition, it reduces the fuel cell power demand of the vehicle, thus improving the power performance and reliability of fuel cell buses. In this case, the average power of the fuel cell city bus is about 23 kW. Combined with the current development of domestic fuel cell systems, a fuel cell system of 60–80 kW can be selected. The common power of the driving cycle falls in the high-efficiency range of the fuel cell system, which has better fuel economy. The battery that meets the peak power of the motor is selected. The selection of the motor is based on the dynamic performance requirements of the vehicle, including the maximum speed, 0–50 km/h acceleration time, and maximum grade ability. Among them, the maximum speed and acceleration time are evaluated on a flat road; the climbing ability is determined by the ability to maintain a constant speed on a specified slope. The power equations are as follows:
where Pu_max, Pacc and Pu_climb are the power demand of the maximum speed ability, the acceleration ability and the grade ability, respectively. umax is the maximum speed on a flat road, uclimb is the climbing speed, and um is a targeted speed that achieves in certain period of acceleration (tm).

Fuel cell and battery vehicles powertrain structure
The vehicle performance and component parameters can be seen from Tables 1 and 2 (Sect. 3.1).
The fuel economy and power of fuel cell electric vehicles depend largely on the energy management strategy. The fuel cell hybrid system uses the fuel cell as the main power supply and the battery as the auxiliary power supply.
The hybrid power system of fuel cell vehicle is an electric multi-energy domain coupling system. The fuel cell bus power system has four coupling states. First, the fuel cell system charges the battery while providing energy for the main drive motor to drive the vehicle. Second, the fuel cell system and the battery system jointly provide energy for the vehicle. Third, the battery system or fuel cell system alone provides energy for the motor-driven vehicle. Fourth, the battery receives braking energy recovery from the motor. The energy management state of the vehicle is shown in Fig. 2. Based on the above four coupling states, the coupling constraint equation is as follows:
where P (ka, n, SOC) is the drive power of the vehicle, ka is the opening degree of the accelerator pedal, n is the rotating speed of the main motor, and SOC is the state of charge of battery. P (U, I) is the discharge power of the power system, and ηd is the total efficiency of the discharge of the power system.

Energy state of dual-power hybrid system
For the operating mode of the fuel cell system and the charging and discharging characteristics of the battery system, the battery is directly connected to the high-voltage bus, making full use of the fast response characteristics of the battery system to provide the dynamic power demand of the vehicle in driving. The fuel cell system is connected to the high-voltage bus through the boost DC/DC converter to decouple the fuel cell and the dynamic power demand of the vehicle. This provides the steady-state power demand of the vehicle in driving. The fuel cell voltage clamp control technology is used to control the output voltage of the fuel cell through the boost DC/DC converter with closed-loop feedback to ensure the output voltage of the single fuel cell is from 0.6 to 0.8 V. The half-power prediction control strategy is adopted to reduce the impact of frequent fluctuations in operating conditions on fuel cell performance.
The purpose of the energy management of the power system is to optimize the economy and energy utilization of the hybrid power system under the premise of meeting the requirements of the vehicle operation. Different energy management strategies have a great impact on the economy and the lifetime of the power system. The control strategy of the powertrain should meet several basic requirements.
-
(1)
Avoiding frequent fluctuations in the output power of the fuel cell system.
-
(2)
Avoiding overcharging/over discharging of the battery.
-
(3)
Ensuring that the SOC of the battery is within the normal operating range.
-
(4)
Making the fuel cell system work in the high-efficiency zone as much as possible.
Currently, there are two main types of control methods: rule-based control and optimization-based control [20]. Rule-based control strategies mainly determine the operating state of the fuel cell system by setting the operating rules of the vehicle power system. Whereas the optimization-based control strategies aim to find the globally or locally optimal solution of the system by solving the minimal value of the objective function under the constraints. In this paper, different rule-based control logic are used to investigate different control logic.
Xu et al. [21] proposed the energy management optimization strategy and the powertrain parameters selection in three cases: ignoring the energy management strategy and optimizing component size only, optimizing component size including simple energy management strategy and optimizing both powertrain parameters and energy management strategy at the same time. The optimization of the energy management strategy in this paper is studied after selecting the parameters of the power system based on a certain rule.
The first energy management strategy, i.e. the stepped control strategy of the SOC, is a fuel cell operating mode control based on the SOC of the battery and has a high dependence on the battery. The control method mainly determines the target power of the fuel cell based on two conditions: the SOC of the battery and the demanded power of the vehicle. The power system is divided into three modes according to the SOC of the battery: (1) high SOC mode; (2) medium SOC mode; and (3) low SOC mode.
-
(1)
High SOC mode: The battery is fully charged and can be made to work at its best discharge efficiency point, with SOC gradually reduced to a reasonable operating range and the fuel cell system working at a low output power to reduce hydrogen consumption.
-
(2)
Medium SOC mode: the SOC of the battery is maintained at a reasonable operating range, and the fuel cell works at its best efficiency point as much as possible and is adjustable according to the actual power demand.
-
(3)
Low SOC mode: the battery power is too low and the SOC needs to rise to the reasonable range, which would make the whole battery operate in charging mode. At the same time, frequent fluctuations in the output power of the fuel cell system should be avoided, and the fuel cell system maintains high power output and stability.
In order to avoid frequent changes in the operating state of the battery between different SOC modes, a hysteresis interval can be added between adjacent SOC modes in this paper, as shown in Fig. 3. In addition, taking the lithium iron phosphate battery as an example, if the target SOC (SOCmed) is set to 50%, the SOClow and SOChigh are 30% and 70%, respectively.

The stepped control strategy of the SOC strategy logic diagram
The second energy management strategy, the half-power prediction control strategy, is based on the demand of vehicle driving cycle. For urban public transport, the driving cycles are relatively immutable. Using a dynamic programming algorithm or Pontryagin’s Minimal Principle to predict the future vehicle speed or demand power and optimize energy management strategies requires extensive computation and online or offline learning. Based on the demanded power of the vehicle and the SOC of the energy-storing device in the previous control period, the target power of the fuel cell in the current control period is predicted. The demand power of the vehicle is calculated in real time from the operation of the vehicle. The average demand power of vehicle is calculated according to a specified period which is the target power of the fuel cell system at the next period. The power is the average demand power of the vehicle in the past time period. In this state, the target power of fuel cell in the first control period is a certain suitable high-efficiency operating point determined according to vehicle driving conditions and fuel cell system efficiency curve. The fuel cell power supply is determined according to the target power. In this case, the fuel cell power supply remains constant in the current control cycle, where the reliability of the fuel cell system can be improved. The driving cycle of city bus refers to a complete process of driving from the departure station to the terminal station, which is relatively stable, and there can be many driving cycles in a day when the bus is running. The driving cycle demand in the next period can be predicted based on the power demand of the vehicle in the previous period. Thus, the target power of the fuel cell system will be closer to the real power demand of the vehicle, so as to avoid the vehicle over-relying on the battery, as shown in Fig. 4. Using the battery as a peak-shaving energy pool guarantees the following of the demanded power of the vehicle and the service life of the fuel cell.

The predicted and actual demand power
First, the control period is determined based on the driving cycle and the performance of the fuel cell system, which is recorded as t. Then, the power demand of the vehicle in the last control period is calculated according to the output power of fuel cell and battery, which is recorded as Paverage. The control period is a reasonable value based on the vehicle demand and the life evaluation of the fuel cell system.
The specific prediction method is as follows:
where Paverage is the predicted fuel cell power during the current control period, kW. PFC is the fuel cell output power, kW. PBat is the output power of the battery after correction of its output power according to the SOC of the battery, kW.
t: the control period, s.
where Pstack is the fuel cell stack power, kW. Paux-FC is all the auxiliary power of the fuel cell system, kW. ηDC is the average static efficiency of the DC converter. I is the current of the battery, A. U is the voltage of the battery, V.
A penalty function is defined to correct the power of fuel cell according to battery SOC as follows. This can avoid excessive SOC fluctuation caused by fuel cell power prediction deviation.
When the SOC of the battery is within the desired range, the battery output power is not corrected; when the SOC of the battery is low, the fuel cell system power is appropriately increased on the basis of Paverage and the battery output power is decreased; and when the SOC is high, the fuel cell system power is appropriately decreased on the basis of Paverage and the battery output power is increased. For different power batteries, the usable range of SOC is different, and the target SOC is also different. Set a target SOC and record it as SOCTg. When SOC − SOCTg = 0, PFC = Paverage. If SOC − SOCTg ≤ 20%, PFC = Paverage + α. If SOC − SOCTg ≥ 20%, PFC = Paverage − β, where α and β are constants. It should be noted that α and β are reasonable values formulated in combination with vehicle demand and fuel cell system life assessment. And the changes of them will cause small changes in energy consumption and SOC. 20% is an empirical value set according to the characteristics of the battery, and its comfort zone is 40–80%. The target SOC is set to 65%. When the SOC is higher than 85%, the fuel cell power needs to be reduced, because the fuel cell will shut down when the SOC is higher than 90%. When the SOC is lower than 45%, the fuel cell power needs to be increased to charge the battery, as a low SOC can make drivers anxious.
According to this principle, the target power of fuel cell in different SOC ranges is calculated. Specific calculations are implemented for different vehicle configurations and driving cycles.
If the prediction of target power deviates, the battery SOC will decrease or increase gradually after a period of time, and deviate from the target SOC. In order to avoid this situation, the fuel cell target power is associated with battery SOC. If the deviation occurs, the target power will be corrected.
The third energy management strategy is the power-following control strategy. The power demands of the vehicle are calculated in real time based on vehicle operating conditions, which can then be considered as the target power of the fuel cell. This control method can significantly reduce the power throughput and charge/discharge rate of the battery. However, its response performance requirements for the fuel cell system are high, and the frequent in-vehicle urban driving cycles may damage the fuel cell membrane electrode set and affect the service life of the fuel cell system.
The specific prediction method is as follows:
where PFC is the target power of fuel cell, kW. T is the motor torque, in N·m. N is the motor rotation speed, rpm. Paux-vehicle is the auxiliary power consumption of the vehicle, kW.
3 Simulation of Energy Management Strategies
3.1 Basic Parameters and Power Performance Indicators of the Vehicle
The power performance parameters of the 12-m fuel cell city bus (ZK6126FCEVG2) “F12” designed by Yutong for the Winter Olympic Games in 2022 are shown in Table 1. The basic parameters of the vehicle are shown in Table 2.
3.2 Economic Simulation of China-World Transient Vehicle Cycle Driving Cycle
The fuel cell vehicle model and control strategy model were built in AMESim and MATLAB/Simulink for co-simulation. In the model, the power of the fuel cell was calculated by the current and voltage, and the corresponding relationship between the current and its consumption rate was used to calculate the efficiency under the current, that is, the efficiency of the current corresponding to the power. The efficiency of the battery was reflected by the internal resistance.
The economic calculation needs to get the following data: the driving distance (D, km), the hydrogen consumption by the fuel cell system (mH2_act, kg), the electric energy variation of the battery (EBat, kW·h), and the electric energy consumption of the vehicle (Ebus, kW·h). Among them, the hydrogen consumption by the fuel cell system (mH2) is calculated by:
where \(\dot{m}\) is the hydrogen fuel mass flow rate, g/s.
The electric energy consumption rate of the vehicle can be calculated as follows:
The equivalent distance by the energy variation of the battery can be obtained by applying the following equation:
The fuel economy of the vehicle can be calculated by:
In light of C-WTVC urban driving cycle, the stepped control strategy of the SOC (Strategy I), the half-power prediction control strategy (Strategy II), and the power-following control strategy (Strategy III) were conducted to make simulation of the economy of the vehicle. The vehicle velocity in the cycle is shown in Fig. 5, and the vehicle miles traveled are shown in Fig. 6, with a total mileage of 5.7 km. The simulation data and energy flow diagrams of the C-WTVC driving cycle are shown in Table 3 and Figs. 7, 8 and 9, respectively.
-
Strategy I: In the control strategy of the SOC, the fuel cell outputs the average power in accordance with the pre-calculated working condition; the mass of hydrogen consumed during the whole process was 0.171 kg, and the fuel economy of the vehicle was 3.28 kg/100 km, in which the SOC was decreased by 0.57%.
-
Strategy II: The fuel cell outputs power according to the average power in the past period; the mass of hydrogen consumed in the whole process was 0.242 kg, and the fuel economy of the vehicle was 3.38 kg/100 km, in which the SOC was increased by 0.44%.
-
Strategy III: The fuel cell outputs power in accordance with the instantaneous power output of the vehicle; the mass of hydrogen consumed during the process was 0.430 kg, and the fuel economy of the vehicle 3.97 kg/100 km, in which the SOC was increased by 2.52%.

Vehicle velocity in the C-WTVC cycle

Vehicle miles traveled in the C-WTVC cycle

Energy flow diagram of the C-WTVC using Strategy I

Energy flow diagram of the C-WTVC using Strategy II

Energy flow diagram of the C-WTVC using Strategy III

Hydrogen consumption in the C-WTVC cycle
According to the simulation, the hydrogen consumptions in the C-WTVC cycle are as shown in Fig. 10. During the calculation of the fuel economy, the electric energy change of battery shall also be taken into account because fuel cells and batteries are all energy sources for bus. A ratio was calculated according to the electric energy generated by the fuel cell system and the electric energy change of the battery, and the mileage was divided according to this ratio. The fuel economy of the vehicle was obtained by dividing the hydrogen consumption by the mileage contributed by the fuel cell electricity. For example, in Strategy I, the electric energy generated by the fuel cell and the battery was 3.13 kW·h and 0.28 kW·h, respectively, the ratio was 92:8, the total mileage was 5.7 km, and the mileage contributed by the fuel cell and the battery were 5.23 km and 0.47 km, respectively.
According to the economic calculation results, the calculated hydrogen consumption per 100 km in Strategy III is the highest (Table 3). As shown in Fig. 11, the frequency of fuel cell power change in energy management Strategy III is relatively higher, which has a great impact on the service life of the fuel cell system. And the hydrogen consumption in Strategy I is the lowest because stationary operation with the average load leads to the minimum fuel consumption according to Fig. 11. It is consistent with Deng's paper in which the fuel consumption of the fuel cell is a slightly parabolic shape [22].

Fuel cell output power in the C-WTVC cycle
As can be seen from the energy flow diagram, Fig. 9, the fuel cell system in Strategy III has the lowest efficiency, but its battery energy cycle is the lowest as well. In this strategy, the vehicle fuel economy is the worst and the battery life is the longest. Thus, Strategy III is not recommended for application.
The efficiencies of fuel cell system in Strategy I and Strategy II are relatively close, and cycle times for the batteries are also similar. Moreover, the fuel economy and battery lifetime of the two strategies are comparable. At the same time, the direct energy utilization rate of the fuel cell in Strategy II is relatively high. According to the calculation results, the hydrogen consumption in Strategy I and Strategy II is comparatively similar (Table 3), but Strategy I not only requires predicting the operating condition of the vehicle in advance or collecting a mass of working condition analyses for parameter calibration, but also boasts stringent experience requirements for technical personnel. By contrast, Strategy II is more adaptable to the working condition, and the target power of fuel cell system can be calculated based on the operating condition. Figure 12 shows that the SOC variation range in Strategy II is more stable than that in Strategy I. Therefore, control Strategy II is selected on the basis of the analysis results and practical applications.

SOC in the C-WTVC cycle
3.3 Economic Simulation of Actual Road Condition
With the actual operating condition of the vehicle collected, the stepped control strategy of the SOC and the half-power prediction control strategy are used in simulation analysis on the hydrogen consumption per 100 km and the cycle times of the battery. The vehicle velocity is shown in Fig. 13, and the fuel cell output power and battery SOC are shown in Fig. 14.

Vehicle velocity in the cycle

SOC and fuel cell power in the cycle
By calculation, the fuel economy of the vehicle is 3.72 kg/100 km when adopting Strategy I. While employing Strategy II, the fuel economy of the vehicle was 3.50 kg/100 km (Table 4). Compared with Strategy I, the hydrogen consumption per 100 km of the vehicle decreases by 5.9%. When performing the half-power prediction control strategy, fuel cell target power can be quickly adjusted according to the driving cycle, rather than solely relying on the battery charge of the SOC, which can reduce its dependence on the battery. Moreover, the operating point of the fuel cell will move to the high-efficiency range, improving the efficiency of the fuel cell to generate electricity and reducing hydrogen consumption.
In the driving cycle of the city bus line, the cycle times of battery per 100 km of Strategy I and Strategy II are 1.16 and 1.11, respectively. The smaller the cycle times of the battery, the longer the lifetime of the battery. Compared with Strategy I, the cycle times of the battery per 100 km fall by 4.3% in Strategy II. Therefore, compared with Strategy I, the lifetime of Strategy II battery will be longer. Figure 14 shows that compared with Strategy II, the power of fuel cell in Strategy I is more stable, which means that the lifetime of fuel cell may be longer. However, at present, the quantitative relationship between system power load change and system attenuation is not very clear, so the fuel cell lifetime cannot be quantitatively evaluated and compared.
4 Test Verification
The stepped control strategy of the SOC and the half-power prediction control strategy were applied in road test and to verify the energy management strategy on the actual operation line of the 12 m fuel cell city bus. The vehicle is shown in Fig. 15.

Test vehicle
The vehicle velocity and the battery SOC are shown in Figs. 16 and 17, respectively. Through the analysis of the collected data, the vehicle traveling distance was 31.5 km. When the half-power prediction control strategy is adopted in this working condition, the range of battery change of the SOC was about 4.4%, the fuel economy of the vehicle was 3.7 kg/100 km, and the cycle time of the battery per 100 km was 0.76. Compared with the stepped control strategy of the SOC, the hydrogen consumption per 100 km was reduced by 7.1%, and the cycle time of the battery was lowered by 6.0%. Configured with 35 MPa hydrogen system, the driving range of the vehicle could reach 670 km, and 1100 km with 70 MPa hydrogen system.

Vehicle velocity in the cycle testing

SOC in the cycle testing (half-power prediction control strategy)
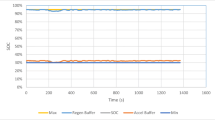
When employing the half-power prediction control strategy, the power output of the fuel cell system is lower than 30 kW as shown in Fig. 18 which demonstrates that the fuel cell system lies within industry accepted efficiency ( greater than 50% as shown in Fig. 19). And the range variation of the SOC is approximately 4.4% and slowly moves to a stable level, as seen in Fig. 17. As a comparison, the fuel cell outputs higher power, its system efficiency is lower, and the range variation of battery of the SOC is greater at 16.0% while adopting the stepped control strategy. Thus, its working condition adaptability is not promising. The above test results are consistent with the simulation data.

Fuel cell system power in the cycle testing (half-power prediction control strategy)

Fuel cell system efficiency
During the test process, in the absence of air conditioning, the power consumption of the driving motor was 29.73 kW·h, the braking energy recovery was 13.86 kW·h, and the power consumed by accessories was 3.12 kW·h, among which the output power of the fuel cell system was 24.25 kW·h, the positive energy of battery was 22.41 kW·h, and the negative energy was 27.68 kW·h. The calculated breaking energy recovery accounted for 46.62%, and the direct energy utilization rate of fuel cell system is 31.76%.
For the fuel cell city bus, more energy is recovered from breaking in operation condition, and the charging and discharging efficiency of battery is higher than 93%. Thus, the throughput of battery is allowed to be slightly higher so that the fuel cell system can operate in the high-efficiency range. Currently, the fuel cell system efficiency could be improved to reduce the hydrogen consumption of the vehicle.
In the half-power prediction control strategy, fuel cell target power can be calculated based on the vehicle demand in the past period of time, which is reasonably close to the current operating condition of the vehicle. Thus, it has strong adaptability to operating conditions. Unlike the stepped control strategy of the SOC, the control strategy does not require calibration of the fuel cell output power and can adapt to a variety of operating conditions, such as different velocities and passenger flow of line vehicles in different cities, and the required power of the vehicle varies. It can also avoid the frequent switching of fuel cell system as the fuel cell output power is greater than the required power of the vehicle, leading to the increase in the hydrogen consumption or the excessive rise of the SOC of the battery, which affect the fuel cell system lifetime. With the improvement of the fuel cell system performance in the future, the cycle of calculating fuel cell target power can be gradually shortened in the energy management strategy so as to further meet the required power of the vehicle.
5 Conclusions
In summary, based on the fuel cell city bus equipped with the proton exchange membrane fuel cell/battery hybrid powertrain, the energy management strategy is studied, simulated, and verified. The half-power prediction energy management strategy is used to predict the target power of the fuel cell system. The prediction of the next cycle is based on the required power of the actual operating condition and the SOC in the previous cycle. The strategies are compared with the stepped control strategy of the SOC and the power-following control strategy by simulation and test verification. Through the half-power prediction technology, a new generation of long-distance fuel cell city bus F12 is specially designed and manufactured for the 2022 Winter Olympic Games. The results show that the half-power prediction energy management strategy is greatly lower in hydrogen consumption, improves the economy of the vehicle as well as reduces the cycle times of the battery, which is helpful to prolong the service life of the battery. When it is equipped with a 35 MPa hydrogen system, the driving range can reach 670 km, and 1100 km with a 70 MPa hydrogen system. It is of significance for the research and application of the energy management strategy in fuel cell city bus.
References
Yokoyama, T., Naganuma, Y., Kuriyama, K., et al.: Development of fuel-cell hybrid Bus. fuel cell power for transportation 2003, Warrendale, 69–76, (2003)
Yokoyama, T., Naganuma, Y., Kuriyama, K., et al.: Development of fuel-Cell hybrid bus. SAE Technical Paper 2003-01-0417, 2003, https://doi.org/10.4271/2003-01-0417.
Park, C., Oh, K., Kim, D., et al.: Development of fuel cell hybrid electric vehicle performance simulator. Int. J. Auto. Tech-Kor. 5(4), 287–295 (2004)
Chen, Q.S., Chou, B., Xie, Q.C., et al.: Fuel cell electric vehicle. Tsinghua University Press, Beijing (2005)
Xu, L.F., Lu, L.G., Li, J.Q., et al.: Modeling and simulation of a hybrid fuel cell system and energy management strategy. Chin. J. Mech. Eng. 45(1), 141–147 (2009)
Hung, W.T., Tong, H.Y., Lee, C.P., et al.: Development of a practical driving cycle construction methodology: a case study in Hong Kong. Transp. Res. D-tr. E. 12(2), 115–128 (2007)
Vincent, F., Eric, F., Aymeric, R.: Comparison of powertrain configuration for plug-in HEVs from a fuel economy perspective. SAE Int. J. Eng. 1(1), 392–398 (2009)
Karbowski, D., Pagerit, S., Kwon, J., et al.: "Fair" comparison of powertrain configurations for plug-in hybrid operation using global optimization. SAE Technical Paper 2009-01-1334, 2009, https://doi.org/10.4271/2009-01-1334.
Chen, Yu.: Research on fuel cell vehicle hybrid power system and energy management control strategy. In: Dissertation, Xiangtan University (2015)
Chen, Y.J.: An overview on system topologies and energy management strategies of fuel cell hybrid vehicles. Integr. Mach. 1, 3–10 (2019)
Zeng, W.: Optimized control and dynamic simulation of energy management system for fuel-cell hybrid electric vehicle. In: Dissertation, Wuhan University of Technology (2007)
Zhang, L.Y.: The power system matching and energy management strategy research of fuel cell range extender electric vehicle. In: Dissertation, East China University of Science and Technology (2016)
Wang, Y.L., Zhang, H.T., Sun, Y.T.: Power distribution control of hybrid electric system based on vehicle condition test. Technol. Econ. Areas Commun. 20(4), 40–45 (2018)
Zhang, T., Song, K., Zhang, T.: Comparative study on degree of hybridization for fuel cell electric vehicle based on economy. Integr. Mach. 7, 11–16 (2015)
Jin, Z.H., Ouyang, M.G., Lu, Q.C., et al.: Optimal control strategy for a fuel cell hybrid powertrain. J. Tsinghua Univ. Sci. Tech. 49(2), 273–276 (2009)
Gao, Y.M., Ehsani, M.: Systematic design of fuel cell powered hybrid vehicle drive train. In: Paper Presented at IEEE International Electric Machines & Drives Conference, Cambridge, MA, USA, (2001)
Ahn, H.S., Lee, N.S.: Power distribution control law for FCHEV-a fuzzy logic-based approach. In: Paper Presented at the 5th International Conference on Control & Automation, the Hungarian Academy of Sciences, the Castle District of Budapest, Hungary, (2005)
Li, X., Xie, Y.B., Song, C., et al.: Management strategy and simulation analysis on fuel cell bus energy based on T-S fuzzy control. Bus Coach Technol. Res. 39(4), 5–8 (2017)
Hu, Z.Y., Li, J.Q., Xu, L.F., et al.: Multi-objective energy management optimization and parameter sizing for proton exchange membrane hybrid fuel cell vehicles. Energ. Convers. Manag. 129, 108–121 (2016)
Xu, L.F., Hua, J.F., Bao, L., et al.: Optimized strategy on squivalent hydrogen consumption for fuel fell hybrid electric bus. China J. Highw. Transp. 22(1), 104–108 (2009)
Xu, L.F., Mueller, C.D., Li, J.Q., et al.: Multi-objective component sizing based on optimal energy management strategy of fuel cell electric vehicles. Appl. Energy 157, 664–674 (2015)
Deng, K., Liu, Y.X., Hai, D., et al.: Deep reinforcement learning based energy management strategy of fuel cell hybrid railway vehicles considering fuel cell aging. Energy Convers. Manag. 251, 115030 (2022)
Acknowledgements
Thanks to the key science and technology project in Henan Province (Innovation Leading Project) "Development and Demonstration of High-Reliability and High-Environmental Adaptability Fuel Cell Bus Vehicles" (Project Number: 191110210200) for supporting this research.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all the authors, the corresponding author states that there is no conflict of interest.
Additional information
Academic Editor: Zhen Wu
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, L., Ning, L., Yang, X. et al. Half-Power Prediction and Its Application on the Energy Management Strategy for Fuel Cell City Bus. Automot. Innov. 6, 131–142 (2023). https://doi.org/10.1007/s42154-022-00210-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42154-022-00210-3