
Abstract
This paper presents a comprehensive evaluation of system interactions in a battery electric vehicle caused by temperature sensitivity of permanent magnet synchronous machines (PMSM). An analytical model of a PMSM considering iron losses and thermal impact is implemented on a field programmable gate array suitable for hardware-in-the-loop testing. By the presented virtual prototyping approach, different machine characteristics defined by the design are used to parameterize the analytical model. The investigated temperature effect is understood as an interacting influence between machine characteristics and control, which are investigated in terms of torque generation, voltage utilization and efficiency under closed-loop condition in a vehicle environment. In particular, using a surface permanent magnet rotor and an interior permanent magnet rotor, the performance of both machine designs is analyzed by varying temperature-adjusted feedforward control strategies on the basis of a driving cycle from a racetrack. The comparison shows that the machine design with surface-mounted magnets is associated with higher temperature sensitivity. In this case, the temperature consideration in the feedforward control provides a \(14\,\%\) loss reduction in closed-loop vehicle test operation. It can be summarized that the electromagnetic torque is less sensitive to a temperature variation with increasing reluctance. The presented development approach demonstrates the impact of interactions in electric powertrains without the need of real prototypes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The electrification of vehicles can result in high system complexity and a large number of variables to improve a powertrain. The main requirements for the electric traction machine (ETM) are high efficiency, high power density, high robustness and low costs. Permanent magnet synchronous machines (PMSM) meet most of these criteria and are therefore the machines predominantly used in electric powertrains.
During the traditional development process of electric machines, several geometry studies and material tests are performed after the specification phase. Under the condition of same rotor dimensions in Ref. [1], the impact of different rotor typologies of PMSM on efficiency, torque and speed behavior is investigated. By means of full-load curves, different rotor shapes are compared. Another design variation is shown in Ref. [2]. Different designs of flux barriers are compared on the basis of finite element analysis (FEA). In Ref. [3], the impact of temperature on different magnet materials is investigated by the constant power speed range (CPSR). The main difficulty with the traditional development approach is that all designs are evaluated under isolated conditions. While this approach works well for several stationary applications, it has limited applicability for ETM that operates over a wide range of operating points in a driving cycle. In addition, the consideration of system interactions with ETM is limited and results in a huge computing effort. Hence, analytical models are parameterized by FEA and executed in Model-in-the-Loop (MIL) simulations in Ref. [4, 5]. By using six different machine design, the CPSR is investigated by system interactions and compared in Ref. [6]. In addition to the CPSR, the choice of material and the machine design influence the temperature effect on the electromagnetics [7]. First investigations on temperature effects of PMSM in open-loop simulations are presented in Ref. [8]. In addition to torque generation, in Ref. [9] the effect on machine currents and speed response are discussed. It is figured out that for efficient operation of PMSM the temperature needs to be considered in the controller. Hence, several flux observers [10] and control strategies are presented for accounting the temperature impact [11,12,13,14,15].
For development of control algorithms and evaluation of the interactions with the machine design real-time capable models are required for Real-Time-Model-in-the-Loop (RT-MIL) [16,17,18,19]. In the last ten years, several time-discrete models of electrical machines are developed and executed on field programmable gate arrays (FPGA) [20,21,22,23]. Most of the presented models neglect the machine losses and model only the basic electromagnetic properties. Luo et. al. presented a model considering magnetic saturation, current harmonics, cross-coupling, eddy current and hysteresis loss effect [24]. In addition to these effects, the authors presented a spatial harmonics model of a PMSM considering thermal impact [25]. In contrast to other published models, the presented model combines all relevant characteristics of ETM for the operation of virtual prototypes in a vehicle environment. Based on this contribution, a comprehensive evaluation of the impact of the design on the system efficiency in combination with the thermal effect becomes possible. In particular, the use of this high-fidelity model together with a new development approach enables the investigation of machine design and system performance without the need to produce real prototypes. In addition to reducing development costs, system interactions can also be considered during the design process. The impact of small changes in machine design on system efficiency and performance can be analyzed in detail. Optimizations toward reduced use of rare earths in PMSM and increased voltage utilization of temperature-dependent controllers can be realized. The scope of this paper is the investigation of ETM during operation in a closed-loop vehicle simulation with a driver model under real-time conditions. By using a virtual prototyping approach, the temperature influence on the torque output, voltage utilization and power losses was determined by comparing a surface permanent magnet synchronous machine (SPMSM) and an interior permanent magnet synchronous machine (IPMSM). Finally, it is shown that the temperature sensitivity strongly depends on the reluctance ratio of the machine design. Based on the presented use case, the validity of the proposed model and the development cycle are shown.
The virtual prototyping approach enables a simultaneous development, where interactions between a control structure and the characteristic of the ETM can be considered in an early design stage. Section 2 introduces both machine concepts and explains the FEA required to parameterize the PMSM model using the virtual prototyping approach. In Sect. 3, the calibrated model structure and the real-time platform including FPGA is presented. The interactions between the virtual prototypes and the control method are investigated in Sect. 4. First, the temperature influence on the mechanical power of the virtual prototypes is elaborated. Second, the voltage utilization of the controller is analyzed with full-load simulations. Thermal effects in the feedforward control, the resulting efficiency of the virtual prototypes as well as the influence of iron losses are finally discussed and interpreted in a closed-loop simulation of a driving cycle.
2 Virtual Prototyping Approach of PMSM
In Fig. 1, a new development cycle for ETM is introduced. The approach is divided in four steps. Starting with a new machine design based on the finite element method (FEM), the second step is the development of an analytical model to simulate the machine behavior in real-time applications. In the third step, the required parameters for calibration of the analytical model are calculated by FEM, which represents the machine design as real-time capable virtual prototype. In the last step, these models are applied in RT-MIL tests for validation of the machine behavior and investigation of system interactions. Finally, the collected results and findings can be fed back to improve the design of ETM for a more efficient system.

Virtual prototyping of PMSM by a seamless development approach
2.1 E-Machine Design
Figure 2 shows the two virtual prototypes investigated here. Since 2D-models are sufficient to evaluate major design influences, they are used in order to reduce the required finite element (FE) computation time compared to more detailed FEM models.

Overview of both FEM designs
In the framework of this study, the same stator design is used in both PMSM. It has 48 slots with four coils of one phase each, forming a distributed winding. The so-called hairpin coils increase the fill factor in the slots due to their rectangular cross-section. In order to obtain comparable prototypes, the magnetic mass \(m_\mathrm{mag}\) and the air gap width \(\delta _{\mathrm{gap}}\) are identical in both designs. Table 1 summarizes the specifications of the virtual prototypes.
In the SPMSM (Fig. 2a), eight magnets are mounted on the rotor circumference. The taping of the magnets is neglected in the FEA since its impact on the magnetic behavior is marginal. The rotor of the IPMSM (Fig. 2b) contains eight symmetrically distributed pairs of magnets. These are arranged in V-shape within the stamped pattern of the rotor sheets. Additional flux barriers in the rotor are used to guide the magnetic flux and thus influence the reluctance behavior of the electric machine.
2.2 Real-Time PMSM Model
The machine behavior is calculated based on the phase voltage components, the electrical angle \(\varphi _{\mathrm{el}}\), the mechanical speed \(n_{\mathrm{mech}}\), the temperatures of the stator windings \(\vartheta _{\mathrm{s}}\) and the permanent magnets \(\vartheta _{\mathrm{PM}}\). After transforming the three-phase voltages, the analytical model is based on the equivalent circuit in the dq reference frame, see Fig. 3. The real-time model takes into account iron saturation, magnetic cross-coupling and magnetic field harmonics. Furthermore, copper, friction and iron losses are considered in the model. A parallel resistor in the equivalent circuit is used to model the impact of iron losses on torque output by a current divider. As a result, the currents \(i_{d},i_{q}\) are reduced by the fictive iron loss currents \(i_{d \mathrm{i}},i_{q \mathrm{i}}\) to the magnetization currents \(i_{d\mathrm{m}},i_{q \mathrm{m}}\). It should be emphasized that iron loss resistances are solely fictive resistances to reflect the influence of the iron losses. A detailed insight into the implementation and validation of the real-time model is presented in Ref. [25].

Equivalent circuit of the analytical model in the dq reference frame with parallel resistor to account for iron losses: (left) d-axis, (right) q-axis
Based on the equivalent circuit the dynamic, electromagnetic voltage equations in dq reference frame of PMSM are given by Eq. (1). Due to the consideration of nonlinearities, field harmonics, iron losses and temperature impact, the flux linkages \(\psi _d\), \(\psi _q\) are functions of the magnetization currents \(i_{d {\mathrm{m}}},i_{q{\mathrm{m}}}\), the electrical angle \(\varphi _{\mathrm{el}}\) and the temperature of permanent magnets \(\vartheta _{\mathrm{PM}}\).
The shaft torque \(M_{\mathrm{shaft}}\) is determined by Eq. (2) and understood as the sum of reaction torque \(M_{\mathrm{L}}\), reluctance torque \(M_{\mathrm{R}}\) and drag torque \(M_{\mathrm{drg}}\). The reaction torque is generated by the permanent magnet and is therefore strongly temperature dependent. The reluctance torque results from the magnetic asymmetry in the d- and q-axis and is almost independent of temperature. The drag torque considers friction and windage.
However, the influence of the temperature dependence on the system performance is in complex interaction with the selected feedforward control and the driving cycle and can only be investigated in a closed control loop.
2.3 Parameterization of Real-Time Models
The analytical model is parameterized with the FEM software, JMAG, developed by JSOL. The FEM simulation is divided into a magnetic field analysis and an iron loss analysis. Due to the number of magnetic poles and the rotational symmetry of the PMSM, a periodicity condition is applied so that only a quarter mechanical or rather one electrical revolution is calculated in the FEA.
2.3.1 Magnetic Field Analysis
In the magnetic field analysis, the flux linkages \(\psi _d(i_{d\mathrm{m}},i_{q\mathrm{m}},\varphi _{\mathrm{el}},\vartheta _{\mathrm{PM}})\) and \(\psi _q(i_{d\mathrm{m}},i_{q\mathrm{m}},\varphi _{\mathrm{el}},\vartheta _\mathrm{PM})\) are determined as functions of magnetization currents, electrical angle and temperature of the permanent magnets. The operating range is polar characterized in 15 current amplitude increments and 36 current phase increments, see Table 2. In addition, the FEA is executed under two different temperatures to determine the temperature influences. This results in a total of 1080 cases. The number of steps specifies the step size of the FE calculation.

Flux linkage distributions and inverse current-flux correlations under \(\vartheta _{\mathrm{PM}}=25~^{\circ }\mathrm{C}\) and \(\vartheta _{\mathrm{PM}}=60~^{\circ }\mathrm{C}\) including the temperature corrected inverse current-flux correlations
In order to prevent undersampling, the step size is determined by the number of slots in the stator. To capture every relative extremum in the pattern of the flux linkages, the step size \(\Delta \varphi _{\mathrm{mech}}\) must be at least half of the slot distance. Since the position of the relative extrema shifts depending on the phase \(\gamma\), the angle resolution is increased. Considering the available memory of the LUT on FPGA, the number of steps is set to 73. This results in a step size of \(\Delta \varphi _{\mathrm{mech}}=1.25^{\circ }\) and consequently in a resolution of \(\Delta \varphi _{\mathrm{el}}=5^{\circ }\). The offline computation time is approximately 8 h with a quadcore JMAG license on a 8-core 3.6 GHz PC. In addition to the resolution, the periodicity condition and the mesh density influence the calculation time of the FE model. In order to avoid derivative calculation in the analytical model, \(\psi _d(i_{d\mathrm{m}},i_{q\mathrm{m}},\varphi _\mathrm{el},\vartheta _{\mathrm{PM}})\) and \(\psi _q(i_{d\mathrm{m}},i_{q\mathrm{m}},\varphi _{\mathrm{el}},\vartheta _{\mathrm{PM}})\) are first inverted to \(i_{d\mathrm{m}}(\psi _d,\psi _q,\varphi _{\mathrm{el}},\vartheta _{\mathrm{PM}})\) and \(i_{q\mathrm{m}}(\psi _d,\psi _q,\varphi _{\mathrm{el}},\vartheta _\mathrm{PM})\) by a MATLAB script in a post-processing [5].
The flux distributions and the inverse current-flux correlations for both virtual prototypes at \(\vartheta _\mathrm{PM}=25~^{\circ }\mathrm{C}\) and \(\vartheta _{PM}=60~^{\circ }\mathrm{C}\) are summarized in Fig. 4. For the diagrams, the dependence on the electrical angle is eliminated by averaging over one electrical revolution. By comparison of the flux linkage distributions, the temperature impact leads to a nearly constant displacement of the direct flux linkage \(\psi _d\) in both machines, whereas the quadrature flux linkage \(\psi _q\) is almost temperature independent. It can be seen that higher temperature leads to lower flux linkage, which affects the torque output and also the voltage utilization. With Eq. (3), the temperature shift is approximated by straight-line equations with the gradients \(m_d\) and \(m_q\) and the axis intercept \(b_d\), whereas \(i_{d\mathrm{m},\vartheta _{\mathrm{PM}}}\) and \(i_{q\mathrm{m},\vartheta _\mathrm{PM}}\) are the magnetization currents at \(\vartheta _{\mathrm{PM}}\) and \(i_{d\mathrm{m},\vartheta _{\mathrm{PM,0}}}\) and \(i_{q\mathrm{m},\vartheta _\mathrm{PM,0}}\) are the magnetization currents at reference temperature \(\vartheta _{\mathrm{PM,0}}\). As a result, the 4D LUT of the inverse current-flux correlation can be reduced by one dimension to simplify the implementation on an FPGA.

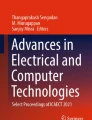
Iron losses in dependency on magnetization currents (\(i_{d\mathrm{m}}\), \(i_{q\mathrm{m}}\)) in motor mode at \(6000\,\mathrm{min}^{-1}\) and \(10{,}000\,\mathrm{min}^{-1}\)
Table 3 contains the parameters of the temperature correction. Based on \(b_d\), it can be recognized that the operating point-independent temperature-related current shift is higher for the SPMSM than for the IPMSM. This implies a higher sensitivity of the SPMSM to temperature changes. The parameters \(m_d\) and \(m_q\) take into account the operating point-dependent temperature influence by multiplication with the flux linkages. However, a direct interpretation of the temperature behavior based on \(m_d\) and \(m_q\) is not possible, since the flux linkage distributions in the PMSM are different. This can be explained by the fact that the geometry of the rotor influences the flux linkage distribution. Finally, the parameters for the temperature correction are stored together with the different LUT at a reference temperature of \(60~^{\circ }\mathrm{C}\). With the linear correction method, any temperature change of the machine can be simulated during operation.
2.3.2 Iron Loss Analysis
The iron losses in the soft magnetic material of rotor and stator are determined using a post-processing calculation by JMAG. During the magnetic field analysis, the FEA calculates the distributions and time variations of the magnetic flux densities in rotor and stator. Based on this, the hysteresis and the eddy current losses are obtained. For the calculation of the hysteresis losses, virtual hysteresis curves are determined by the maximum and minimum values of the magnetic flux densities for each FEA case. The eddy current losses are obtained by a fast Fourier transform (FFT) of the magnetic flux densities. By the demonstrated methods, the total iron losses as a function of \(i_{d\mathrm{m}}\), \(i_{q\mathrm{m}}\) and \(n_\mathrm{mech}\) are identified. Since the iron loss distribution is mirror-symmetrical to the d-axis, the FE calculations are limited to the second quadrant of the dq reference frame. Furthermore, the maximum speed of the virtual prototypes is limited to \(10{,}000\,\mathrm{min}^{-1}\). This results in 15 current, 10 phase and 5 speed samples and thus 750 cases for the FEA. Since an ideal sinusoidal excitation without total harmonic distortion is used for the FEA, 201 steps are sufficient to capture the occurring iron losses. To consider the influence of modulation on the iron losses, a PWM generated current excitation can be used. However, this would require a significant increase in the number of steps. Thus, the improved accuracy of the iron loss determination is directly related to an increasing calculation time. The offline computation time to calculate \(P_{Fe}(i_{d\mathrm{m}},i_{q\mathrm{m}},n_{\mathrm{mech}})\) with 201 steps and the operating points defined in Table 4 is approximately 12 h with a quadcore JMAG license on a 8-core 3.6 GHz PC.
Figure 5 shows the FE-calculated iron losses of the SPMSM and the IPMSM in the dq reference frame for different speeds. The isolines of the iron loss spread out from short circuit current at SPMSM, while the center point of the isolines is next to zero current of IPMSM. In addition, iron losses increase exponentially with increasing speed. For speeds below \(2000\,\mathrm{min}^{-1}\), extrapolation is used, and for operating points between the reference points, interpolation via a spline function is applied.
The parameters for the calculation of the bearing friction are obtained from the bearing catalog. The fact that the same bearings are used in both PMSMs leads to identical bearing friction losses. Since the taping closes the gap between the magnets of the SPMSM, approximately the same windage losses can be assumed for both PMSM.
3 Real-Time Simulation Platform and Model Structure
The main hardware components of the real-time platform are a dSPACE SCALEXIO LabBox with integrated FPGA board, a dSPACE SCALEXIO with integrated processor board and a host PC. The software environment consists of the following programs: dSPACE Release 18a, MATLAB Simulink 2017b and Vivado 2017.4. According to the hardware setup, the simulation model is divided into processor and FPGA model, see Fig. 6.

Overview of the real-time simulation platform including the processor and FPGA model
The sample times are \(0.1~\mathrm{ms}\) for the processor model and 8 ns for the FPGA model. Due to the modeled spatial harmonics of the PMSM, an FPGA implementation is necessary to meet the real-time requirements. In addition, a field-oriented current controller and an inverter are used in the FPGA model. The FPGA model is designed in MATLAB Simulink with the Xilinx System Generator (XSG) blockset without a hardware description language hand coding. In contrast to the modeled electrodynamics, only the fundamental wave is considered in the vehicle simulation including the driver and the feedforward control. Therefore, the mechanical simulations are performed on the processor. In the following, each model part is presented separately, except the machine model.
3.1 Controller and Inverter
A field-oriented current control is used to operate the powertrain. During operation, the current set values specified by the feedforward control are adjusted by the controller. A proportional integral (PI) current controller calculates the voltage setpoints from the deviations between the set and the feedback currents. A simple PMSM model based on the linear voltage equations is implemented in the PI controller. For the sake of simplification, constant inductances and a constant permanent magnet flux linkage are considered. Using the inverse Clarke- and Park-transformation, the voltage setpoints are then converted into three-phase reference voltages for the modulation. Finally, the gate signals for the insulated gate bipolar transistors of the inverter are calculated using sinusoidal pulse width modulation (SPWM). The controller runs with a sample time of \(50\,\upmu \mathrm{s}\) for an inverter switching frequency of 10 kHz. The inverter model is part of the dSPACE Electric Components Library. It is used to determine the phase voltages based on the gate signals of the SPWM. Additional required inputs are the DC link voltage, the phase currents and the back-EMF voltages of the PMSM model.
3.2 Feedforward Control Calculation
The feedforward control provides current setpoints to generate the required torque over the entire speed range. Since a torque request can be realized with many different combinations, optimum current setpoints have to be determined to ensure minimum power losses. The current setpoints are stored in a 3D LUT in the processor model as a function of speed, DC link voltage and torque request. The feedforward controls for both PMSM are determined by the method presented in Ref. [26]. First, the electromagnetic torque is calculated based on the flux linkages \(\psi _d (i_d,i_q)\) and \(\psi _q (i_d,i_q)\) determined with the FEM software. Then, the friction torque is subtracted. Finally, the maximum torque per ampere (MTPA) and maximum torque per voltage (MTPV) curves for different speeds and permanent magnet temperatures are identified with an iterative algorithm. For the calculation of the MTPV curves, the maximum terminal voltage \(u_{\mathrm{max}}\) for SPWM has to be considered. To ensure a voltage reserve for temperature influences and dynamic operating point changes, the voltage utilization Mr for stationary conditions is limited by the feedforward control to \(87\,\%\) of \(u_{\mathrm{max}}\).
3.3 Vehicle and Driver Model
The vehicle model is a longitudinal dynamics simulation model [17, 18] based on the Smart EQ fortwo. Table 5 summarizes the vehicle specifications. The overall gear ratio is calculated so that the PMSM speed is limited to \(10{,}000\,\mathrm{min}^{-1}\) at the maximum velocity of the driving cycle. A PI controller with anti-windup function is used as driver model. Based on the deviation between the reference velocity \(v_{\mathrm{ref}}\) and the vehicle velocity \(v_\mathrm{veh}\), the required vehicle acceleration is determined. A corresponding driver torque request is calculated and sent to the feedforward control. Since the operation strategy does not include recuperation, a negative torque request is realized by a mechanical friction brake. The maximum mechanical brake torque \(M_\mathrm{Brake,max}\) is set to the twofold of the maximum PMSM torque taking the gear ratio i into account.
4 Results and Discussion
In this chapter, the interactions between the introduced virtual prototypes and the current controller are investigated. First, the temperature influence on the mechanical power and on the voltage utilization is analyzed based on full-load curve simulations. Second, the influences of iron losses and temperature on the energy consumption are investigated in a transient driving cycle simulation. In the following, a homogeneous temperature distribution in the machine is assumed so that the condition applies: \(\vartheta _{\mathrm{PMSM}}=\vartheta _{\mathrm{St}}=\vartheta _{\mathrm{PM}}\).
4.1 Full-Load Curve Simulation
The temperature influence on the PMSM is analyzed with full-load curve simulations. To ensure comparability, both virtual prototypes are limited to a maximum torque of 160 N·m and a maximum power of 80 kW. Figure 7 shows the test sequence for a full-load curve simulation.

Desired full-load curve including MTPA starting at \(1000\,\mathrm{min}^{-1}\)
The starting point is at \(1000\,\mathrm{min}^{-1}\) and 0 N·m. First, the torque is increased in 5 N·m steps up to the maximum torque in order to analyze the MTPA behavior. At maximum torque, the speed is then increased in \(100\,\mathrm{min}^{-1}\) steps until an output power of 80 kW is reached. From there, the speed is further increased following the maximum power up to the speed limit of \(10{,}000\,\mathrm{min}^{-1}\). For each operating point, the current controller is given sufficient time to adjust the set values. Then, the simulated variables on the FPGA board are averaged over one mechanical revolution and transferred to the processor model. A time interval of 2 s per operating point is recorded on the processor. For the following analysis, mean values for each operating point are calculated from the measurement files. The full-load curves for both PMSM are simulated at different temperatures. In this context, the specified machine temperature \(\vartheta _{\mathrm{PMSM}}\) always applies to both the permanent magnet temperature \(\vartheta _{\mathrm{PM}}\) and the stator winding temperature \(\vartheta _{\mathrm{St}}\). Since no thermal model is executed in parallel to the electromagnetic model, the machine temperature stays constant. Nevertheless, the temperature-related interactions between machine characteristics and controller can be investigated with different constant temperatures. The feedforward controls are calibrated to \(\vartheta _\mathrm{ctrl}=60~^{\circ }\mathrm{C}\) for all full-load curve simulations. The resulting setpoints \(i_{d\mathrm{,set}}\) and \(i_{q\mathrm{,set}}\) together with the torque isolines for the SPMSM and the IPMSM at \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\) are given in Fig. 8.

Current setpoints of MTPA and MTPV for desired full-load curve
4.1.1 Power Reduction Due to Temperature Influence
In a fixed operating point (\(i_{d\mathrm{,set}}, i_{q\mathrm{,set}}\)), the torque and the mechanical power decrease with increasing temperature. This temperature influence on both virtual prototypes is shown in Fig. 9. The diagrams are limited to the ramp-up from \(1000\,\mathrm{min}^{-1}\) to \(10{,}000\,\mathrm{min}^{-1}\). Since iron losses are not included in the calculation of the feedforward control, the torque decreases below the set value as iron losses increase. Therefore, even with the calibrated temperature \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\), both PMSM reach slightly less than the requested mechanical power of 80 kW at high speed.

Power reduction due to a temperature increase from \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\) to \(90~^{\circ }\mathrm{C}\) and \(120~^{\circ }\mathrm{C}\) for a feedforward control calibrated to \(\vartheta _{\mathrm{ctrl}}=60~^{\circ }\mathrm{C}\)
The lower diagrams in Fig. 9 show the power reduction caused by a temperature increase from \(\vartheta _\mathrm{PMSM}=60~^{\circ }\mathrm{C}\) to \(90~^{\circ }\mathrm{C}\) and \(120~^{\circ }\mathrm{C}\). Especially at high speed, it can be seen that the power reduction of the SPMSM is more than twice as high as that of the IPMSM. As mentioned above, the power reduction is related to the temperature dependence of the torque. The electromagnetic torque is composed of a temperature-dependent reaction component and a temperature-independent reluctance component. Since the reluctance component is caused by different inductances \(L_d\) and \(L_q\), the reluctance ratio \(\xi _{\mathrm{L}}\) is used to evaluate the temperature sensitivity of the torque.
Figure 10 shows the reluctance ratios for both PMSM in the dq reference frame. The reluctance ratio of the SPMSM is roughly one \((\xi _{\mathrm{L}}\approx 1)\). Since this implies that almost only reaction torque is generated, a high temperature-dependent power reduction can be concluded. However, for the IPMSM, \(\xi _{\mathrm{L}} \ll 1\) indicates a significant reluctance torque and thus a lower power reduction. Nevertheless, the reluctance ratio is only a qualitative indicator. For a quantitative analysis, the proportion of the reaction torque to the electromagnetic torque is calculated. Since the reaction torque \(M_{\mathrm{L}}\) is caused by Lorentz force, the index L is used. The reluctance torque \(M_{\mathrm{R}}\) is indicated by the index R.

Reluctance ratios in dependency on magnetization currents (\(i_{d\mathrm{m}}\), \(i_{q\mathrm{m}}\)) in motor mode at \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\)
Figure 11 shows the indicator \(\xi _{\mathrm{M_L}}\) for both PMSM. Additionally, the setpoints (\(i_{d\mathrm{,set}}, i_{q\mathrm{,set}}\)), for the full-load curve simulations are included in the diagrams. In the SPMSM at least \(95\,\%\) of the electromagnetic torque are generated via the temperature-dependent reaction component. Therefore, the electromagnetic torque shows a high sensitivity to temperature changes, resulting in a high temperature-related power reduction.

Proportion of the reaction torque to the electromagnetic torque in motor mode for \(\vartheta _\mathrm{PMSM}=60~^{\circ }\mathrm{C}\) and \(\vartheta _{\mathrm{PMSM}}=25~^{\circ }\mathrm{C}\)
According to Fig. 11a, the operating point has no major impact on the proportion of the reaction torque and thus on the temperature dependency. For the IPMSM, the indicator \(\xi _{\mathrm{M_L}}\) decreases with increasing current \(i_d\), which means that the proportion of the temperature-dependent reaction component decreases. Due to the high reluctance torque, the IPMSM shows a lower temperature-related power reduction. The current setpoints reveal that due to the bending of the MTPA curve a significant reluctance torque is already generated at low speed. According to Fig. 11b, the proportion of the reluctance torque increases with higher speed. Therefore, the temperature-related power reduction of the IPMSM first increases with increasing mechanical power, before it decreases slightly at maximum mechanical power and increasing speed. In a fixed operating point (\(i_{d\mathrm{,set}}, i_{q\mathrm{,set}}\)), the reaction torque decreases with increasing temperature.
4.1.2 Temperature-Related Change of Voltage Utilization
In addition to the impact on the torque, the temperature also influences the voltage utilization. Figure 12 shows the flux linkages \(\psi _d\) and \(\psi _q\) as well as the voltage utilization for the full-load curves at different temperatures. In the lower diagrams, it can be seen that at \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\), the limited voltage utilization of \(87\,\%\) is reached at approximately \(4800\,\mathrm{min}^{-1}\) for both PMSM. To further increase the speed, the field is weakened so that the voltage utilization remains constant.

Deviation of voltage utilization Mr due to a stepwise temperature increase from \(\vartheta _\mathrm{PMSM}=25~^{\circ }\mathrm{C}\) to \(120~^{\circ }\mathrm{C}\) for a feedforward control calibrated to \(\vartheta _{\mathrm{ctrl}}=60~^{\circ }\mathrm{C}\)
Furthermore, a temperature change of the IPMSM has almost no influence on the voltage utilization. However, the voltage utilization of the SPMSM varies with increasing speed depending on the temperature. An increase in temperature causes the voltage utilization to decrease and vice versa. This behavior can be explained with the stationary voltage equations and the temperature coefficient of copper and magnet material. When the PMSM is operated at the voltage limit, the contributions of the induced voltages are much higher than the voltage drops across the stator winding resistance. Therefore, the influence of the temperature-related resistance change on the voltage utilization is marginal. The flux linkage \(\psi _d\) decreases almost proportionally with increasing temperature, whereas the flux linkage \(\psi _q\) is more or less temperature independent. The decreasing \(\psi _d\) leads to a reduction of \(u_q\) with increasing temperature. Although the percentage decrease in the induced voltage is lower for the SPMSM than for the IPMSM, the absolute decrease is higher due to the higher \(\psi _d\). This results in a stronger temperature influence in \(u_q\) and thus in the voltage utilization for the SPMSM. The indicator \(\xi _{\mathrm{\psi _d}}\) is calculated to evaluate the temperature influence on the voltage utilization by Eq. (6).
It determines the proportion of the electromagnetic torque that is generated by \(\psi _d\). This parameter can be used to assess the influence of the flux linkage distribution on the voltage utilization. The \(\xi _{{\psi _d}}\) isolines for the SPMSM and the IPMSM are given in Fig. 13. In both diagrams, \(\xi _{{\psi _d}}\) decreases with increasing amount of the magnetization current \(i_{d\mathrm{m}}\), caused by field weakening. The \(\xi _{{\psi _d}}\) isolines of the SPMSM are vertical due to the almost vertical \(\psi _d\) and the almost horizontal \(\psi _q\) isolines. In the \(\xi _{{\psi _d}}\) isolines of the IPMSM, the curved shape of the corresponding \(\psi _d\) isolines can be recognized in Fig. 4.

Proportion of the electromagnetic torque that is generated via \(\psi _d\) in motor mode for \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\) and \(\vartheta _{\mathrm{PMSM}}=25~^{\circ }\mathrm{C}\)
As a result of the overall higher \(\psi _d\) in the SPMSM, the indicator \(\xi _{{\psi _d}}\) is higher in all areas of the diagram compared to the IPMSM. With increasing temperature, the \(\xi _{\psi _d}\) isolines shift in d-axis direction so that the sensitivity of the voltage utilization decreases with increasing temperature. Due to the nearly vertical MTPA in Fig. 13a, most of the electromagnetic torque is generated by \(\psi _d\) up to a speed of \(4800\,\mathrm{min}^{-1}\). Nevertheless, the temperature influence on the voltage utilization is small due to the low speed. Although \(\xi _{\psi_{\mathrm{d}}}\) decreases with increasing speed, the temperature effect in the voltage utilization becomes stronger due to the speed influence on the induced voltage. For the IPMSM, the proportion of the electromagnetic torque that is generated by \(\psi _d\) already decreases at low speed due to the bending of the MTPA curve (Fig. 13b). The small proportion at high speed indicates a low flux linkage \(\psi _d\) and thus an almost temperature-independent voltage utilization.
4.2 Driving Cycle Simulation
In this chapter, further investigations of the design impact on the control structure are carried out with a driving cycle simulation. In this context, the influence of iron losses and temperature on the energy consumption is analyzed. A section of the Nürburgring Nordschleife is used as reference cycle. Figure 14 shows the velocities \(v_{\mathrm{ref}}\) and \(v_\mathrm{veh}\), the velocity deviation \(\Delta v\) and the mechanical energy demand \(E_{\mathrm{mech}}\). The average velocity deviation during the driving cycle is \(\bar{\Delta v} = 1.37\,\mathrm{km/h}\) and the maximum deviation is \(\Delta v_{\mathrm{max}} = 5.72\,\mathrm{km/h}\). Due to the highly dynamic braking and acceleration processes, the control quality of the driver model is evaluated as sufficient.

(top) Velocity profiles \(v_{\mathrm{veh}}\) and \(v_\mathrm{ref}\) and mechanical energy demand \(E_{\mathrm{mech}}\) of the driving cycle, (bottom) velocity deviation \(\Delta v=v_{\mathrm{veh}}-v_\mathrm{ref}\)
4.2.1 Influence of Iron Losses
The influence of iron losses on the energy consumption of the virtual prototypes is analyzed in more detail in this section. For this purpose, driving cycles at \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\) with and without consideration of iron losses are simulated for both PMSM. The temperature input of the feedforward control is also set to \(\vartheta _{\mathrm{ctrl}}=60~^{\circ }\mathrm{C}\). Figure 15 shows the total loss and the percentage distribution of electrical energy \(E_{\mathrm{el}}\) in mechanical energy demand \(E_{\mathrm{mech}}\) and the energy loss \(E_\mathrm{loss}\). The latter is subdivided into copper losses \(E_{\text{Cu}}\), iron losses \(E_{\mathrm{Fe}}\) and friction losses \(E_{\mathrm{fric}}\).

Energy distributions in the driving cycles with and without iron loss for \(\vartheta _{\mathrm{PMSM}}=60~^{\circ }\mathrm{C}\) and \(\vartheta _\mathrm{ctrl}=60~^{\circ }\mathrm{C}\)
Depending on how accurately the driver follows the reference velocity, the mechanical energy consumption of the vehicle varies. Since the behavior of the PMSM has an influence on the interactions between driver and vehicle model, slightly different values result for \(E_{\mathrm{mech}}\). In both PMSM, copper losses account for the majority of the overall losses. If iron losses are considered, the copper losses increase slightly due to the additional iron loss currents in the equivalent circuit. Furthermore, the consideration of iron losses increases the total losses. In the SPMSM, \(0.87\,\%\) of the electrical energy demand of the driving cycle is converted into iron losses, compared to \(1.06\,\%\) in the IPMSM. Thus, the modeled iron losses have a significant contribution to the total losses and a non-negligible impact on the efficiency of the PMSM. The SPMSM causes lower iron and higher copper losses compared to the IPMSM. The latter are caused by the fact that the SPMSM requires stronger field weakening and thus a higher current \(i_d\) at high speed due to the higher flux linkage \(\psi _d\).

Percentage loss distributions in the driving cycle under different temperatures
Furthermore, the current \(i_d\) generates almost no additional reluctance torque in the SPMSM. Therefore, a higher current \(i_q\) is required to reach the desired torque compared to the IPMSM. As a result, the copper losses account for only \(70.5\,\%\) of the overall losses in the IPMSM compared to \(83.1\,\%\) in the SPMSM.
4.2.2 Temperature Influence
The temperature has a major impact on the interactions between the PMSM and the control structure. Therefore, the temperature influence on the energy consumption of the virtual prototypes is investigated in this section. The permanent magnet temperature mainly affects the permanent magnet flux linkage \(\psi _{\mathrm{PM}}\) and thus the torque, the voltage utilization and the required field weakening. The stator winding temperature has a major influence on the stator winding resistance. To analyze theses temperature effects, driving cycles with different machine temperatures (\(\vartheta _\mathrm{PMSM}=25~^{\circ }\mathrm{C}\) and \(90~^{\circ }\mathrm{C}\)) and differently calibrated feedforward controls (\(\vartheta _{\mathrm{ctrl}}=25~^{\circ }\mathrm{C}\) and \(90~^{\circ }\mathrm{C}\)) are simulated for both PMSM. This results in a total of eight driving cycles, which are examined in the following. A graphical illustration of the losses is shown in Fig. 16. The average mechanical energy demand \({\bar{E}}_{\mathrm{mech}}\) of all eight driving cycles is calculated as reference value. The percentages of the different losses in relation to \({\bar{E}}_{\mathrm{mech}}\) are specified in the diagrams. Basically, an increased machine temperature leads to a higher stator resistance and a reduced permanent magnet flux linkage. Due to the lower flux linkage, higher currents are necessary to generate the desired torque. However, only a lower field weakening is required since the induced voltage decreases. This effect can be exploited by a temperature-adapted calibration of the feedforward control which is defined as calibration temperature \(\vartheta _{\mathrm{ctrl}}\). The following evaluation is focused on the impact of the temperature-adapted control on the different losses and a resulting efficiency enhancement.
First, the influence of the machine temperature at constant temperature of the feedforward control is explained. Then, the influence of the adaptation of the feedforward control to the machine temperature is analyzed. Finally, the virtual prototypes are compared to each other. Since iron and friction losses are modeled as temperature independent, the machine temperature itself has no direct impact on these losses. Both diagrams indicate that an increased machine temperature \(\vartheta _{\mathrm{PMSM}}\) at constant calibration temperature \(\vartheta _{\mathrm{ctrl}}\) leads to higher copper losses. This is caused by the higher currents required to generate the same torque as well as the higher stator winding resistance. In the driving cycles with a machine temperature and a calibration temperature of \(\vartheta _{\mathrm{ctrl}}=25~^{\circ }\mathrm{C}\), the limited voltage utilization of \(87\,\%\) is achieved during most of the driving cycle. If the calibrated temperature is increased to \(\vartheta _{\mathrm{ctrl}}=90~^{\circ }\mathrm{C}\), the current setpoints of the feedforward control cause less field weakening. Therefore, a voltage utilization of more than \(87\,\%\) is reached. With the same electrical power, the higher voltage utilization leads to lower currents and thus to decreased copper losses and increased efficiency. However, the increased voltage utilization results in a reduced voltage reserve and lower control dynamics. Depending on the temperature difference between \(\vartheta _{\mathrm{PMSM}}\) and \(\vartheta _{\mathrm{ctrl}}\) as well as the temperature sensitivity of the voltage utilization, this incorrect calibration can lead to a voltage utilization of \(100\,\%\). As a result, the requested currents cannot be achieved at low machine temperatures. For the driving cycles with a machine temperature and a calibration temperature of \(25~^{\circ }\mathrm{C}\), the voltage utilization is also \(87\,\%\) during most of the driving cycle. If the calibration temperature is decreased to \(90~^{\circ }\mathrm{C}\), the reverse phenomenon can be recognized. Since the machine temperature is higher than the calibration temperature, the field weakening by the requested currents is too strong. This reduces the voltage utilization and results in higher copper losses and lower efficiency. As shown in Sect. 4.1.2, the voltage utilization of the SPMSM at a constant calibration temperature shows a higher sensitivity to changes in the machine temperature compared to the IPMSM. Therefore, the influence of the machine temperature on the copper losses is higher for the SPMSM. Furthermore, the influence of the calibration temperature on the copper losses at constant machine temperature is higher for the SPMSM than for the IPMSM. This can be illustrated by the driving cycles at \(\vartheta _{\mathrm{PMSM}}=90~^{\circ }\mathrm{C}\). As described above, the field weakening is reduced by an increase in calibration temperature. Due to the higher flux linkage \(\psi _d\) in the SPMSM, a higher amount of \(i_d\) can be reduced compared to the IPMSM. Consequently, a higher efficiency is achieved by adapting the calibration temperature for the SPMSM. This effect can also be recognized by comparing driving cycles at \(\vartheta _\mathrm{PMSM}=\vartheta _{\mathrm{ctrl}}=25~^{\circ }\mathrm{C}\) with those at \(\vartheta _{\mathrm{PMSM}}=\vartheta _{\mathrm{ctrl}}=90~^{\circ }\mathrm{C}\) for both PMSM. With the adapted calibration temperatures, the copper losses of the IPMSM increase more than those of the SPMSM with an increase in the machine temperature. The higher current change due to an adapted calibration temperature can also be seen in the iron losses. These are almost independent of the calibration temperature in the IPMSM, whereas they change in the SPMSM. Since iron losses of the SPMSM increase with decreasing currents (Fig. 5), a higher calibration temperature leads to increased iron losses.
5 Conclusion
In this contribution, the temperature sensitivity of PMSM is investigated by the interactions between the impact of machine characteristic and controller calibration. In Table 6, a summary of the analyzed characteristics of both PMSMs is given. SPMSM shows a higher temperature sensitivity in comparison with IPMSM due to low reluctance ratio. Consequently, for efficient operation of these kind of rotor topologies, the benefit for temperature dependent control is high in terms of a sufficient voltage utilization, torque output and finally efficiency. In contrast, rotor topologies with buried magnets show higher reluctance ratios and consequence with lower temperature sensitivity toward temperature-adapted controllers. In particular, this effect can be explained by the temperature independence of the reluctance component. Due to the temperature dependence of the direct flux linkage \(\psi _d\), the voltage utilization of the current controller reacts more sensitively to a temperature variation with increasing \(\psi _d\). As a result, the possible efficiency enhancement, which can be achieved by adapting the feedforward control to the machine temperature, increases with higher \(\psi _d\). In the presented scenarios of a machine temperature of \(\vartheta _{\mathrm{PMSM}}=90~^{\circ }\mathrm{C}\), the loss energy of the IPMSM can only be reduced by approximately \(3\,\%\) with an adjustment of the feedforward control from \(\vartheta _\mathrm{ctrl}=25~^{\circ }\mathrm{C}\) to \(90~^{\circ }\mathrm{C}\). In contrast, the loss energy of the SPMSM can be reduced by approximately \(14\,\%\), due to the significantly higher direct flux linkage \(\psi _d\). In addition, the proportion of the FE-calculated iron losses in the electrical energy demand of the driving cycles is approximately \(1\,\%\) for both virtual prototypes. Therefore, iron losses have a significant influence on the simulated efficiency and should not be neglected.
It can be summarized that the adaption of the control strategies by machine temperature results in a significant improvement of the system efficiency. Since the dynamic adaption of the machine temperature in the feedforward control leads to high effort, often a static temperature calibration is preferred. However, by the presented method the trade-off between an efficient operation and a sufficient voltage reserve under driving cycles can be found to calibrate the controller to a certain temperature.
Abbreviations
- CPSR:
-
Constant power speed rang
- ETM:
-
Electric traction machine
- FEA:
-
Finite element analysis
- FEM:
-
Finite element method
- FPGA:
-
Field programmable gate arrays
- PMSM:
-
Permanent magnet synchronous machines
- RT-MIL:
-
Real-time-model-in-the-loop
References
Hwang, M.H., Han, J.H., Kim, D.H., Cha, H.R.: Design and analysis of rotor shapes for IPM motors in EV power traction platforms. Energies 11(10), 2601 (2018). https://doi.org/10.3390/en11102601
Stumberger, B., Stumberger, G., Hadziselimovic, M., Marcic, T., Virtic, P., Trlep, M., Gorican, V.: Design and finite-element analysis of interior permanent magnet synchronous motor with flux barriers. IEEE Trans. Magn. 44(11), 4389–4392 (2008). https://doi.org/10.1109/TMAG.2008.2002587
Soleimani, J., Vahedi, A., Ejlali, A., Bafghi, M.B.: Study on interior permanent magnet synchronous motors for hybrid electric vehicle traction drive application considering permanent magnet type and temperature. Turk. J. Electr. Eng. Comput. Sci. 22, 1517–1527 (2014). https://doi.org/10.3906/elk-1105-58
Li, S., Han, D., Sarlioglu, B.: Modeling of interior permanent magnet machine considering saturation, cross coupling, spatial harmonics, and temperature effects. IEEE Trans. Transp. Electr. 3(3), 682–693 (2017). https://doi.org/10.1109/TTE.2017.2679212
Chen, X., Wang, J., Griffo, A.: A high-fidelity and computationally efficient electrothermally coupled model for interior permanent-magnet machines in electric vehicle traction applications. IEEE Trans. Transp. Electr. 1, 336–347 (2015). https://doi.org/10.1109/TTE.2015.2478257
Huynh, T.A., Hsieh, M.F.: Comparative study of PM-assisted SynRM and IPMSM on constant power speed range for EV applications. IEEE Trans. Magn. 53(11), 1–6 (2017). https://doi.org/10.1109/TMAG.2017.2707125
Wang, A., Li, H., Liu, C.T.: On the material and temperature impacts of interior permanent magnet machine for electric vehicle applications. IEEE Trans. Magn. 44, 4329–4332 (2008). https://doi.org/10.1109/TMAG.2008.2001527
Sebastian, T.: Temperature effects on torque production and efficiency of PM motors using NdFeB magnets. IEEE Trans. Ind. Appl. 31(2), 353–357 (1995). https://doi.org/10.1109/28.370284
Bilgin, O., Kazan, F.A.: The effect of magnet temperature on speed, current and torque in PMSMs. In: International Conference on Electrical Machines (ICEM), pp. 2080–2085 (2016). https://doi.org/10.1109/ICELMACH.2016.7732809
Specht, A., Bocker, J.: Observer for the rotor temperature of IPMSM. In: International Power Electronics and Motion Control Conference (2010). https://doi.org/10.1109/EPEPEMC.2010.5606818
Li, S., Sarlioglu, B., Jurkovic, S., Patel, N., Savagian, P.: Analysis of temperature effects on performance of interior permanent magnet machines. In: IEEE Energy Conversion Congress and Exposition (ECCE), pp. –8 (2016). https://doi.org/10.1109/ECCE.2016.7855214
Kim, Y.S., Sul, S.K.: Torque control strategy of an IPMSM considering the flux variation of the permanent magnet. In: IEEE Industry Applications Annual Meeting, pp. 1301–1307 (2007). https://doi.org/10.1109/07IAS.2007.202
Rabiei, A., Thiringer, T., Alatalo, M., Grunditz, E.A.: Improved maximum-torque-per-ampere algorithm accounting for core saturation, cross-coupling effect, and temperature for a PMSM intended for vehicular applications. IEEE Trans. Transp. Electr. 2(2), 150–159 (2016). https://doi.org/10.1109/TTE.2016.2528505
Etzold, K., Kürten, C., Thul, A., Müller, L., Scheer, R., Meyer, M.-A., Granrath, C., Schröder, M., Hameyer, K., Andert, J.: Efficient power electronic inverter control developed in an automotive hardware-in-the-loop setup. SAE Technical Paper 2019-01-0601 (2019). https://doi.org/10.4271/2019-01-0601
Winkler, A., Frey, J., Fahrbach, T., Frison, G., Scheer, R., Diehl, M., Andert, J.: Embedded real-time nonlinear model predictive control for the thermal torque derating of an electric vehicle. IFAC-PapersOnLine 54(6), 359–364 (2021). https://doi.org/10.1016/j.ifacol.2021.08.570
Florin, P.P., Mircea, R., Raul, N., Martis, C., Adrian-Cornel, P.: Real-time model in the loop analysis of pmsm for electric power steering system based on fpga implementation. In: International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), pp. 1358–1363 (2018). https://doi.org/10.1109/SPEEDAM.2018.8445395
Abdelrahman, A.S., Algarny, K.S., Youssef, M.Z.: A novel platform for powertrain modeling of electric cars with experimental validation using real-time hardware in the loop (HIL): A case study of gm second generation Chevrolet Volt. IEEE Trans. Power Electron. 33(11), 9762–9771 (2018). https://doi.org/10.1109/TPEL.2018.2793818
Wang, H., Yuwen, Z., Fang, D., Qiao, Y., Li, Z.,(eds.): Development of pure electric vehicle powertrain controller based on hardware in the loop platform. In: IEEE International Conference on Software Engineering and Service Science (ICSESS) (2015). https://doi.org/10.1109/ICSESS.2015.7339106
Zhao, N., Schofield, N., Yang, R., Gu, R.: Investigation of DC-link voltage and temperature variations on EV traction system design. IEEE Trans. Ind. Appl. 53(4), 3707–3718 (2017). https://doi.org/10.1109/TIA.2017.2692198
Dufour, C., Belanger, J., Abourida, S., Lapointe, V. (eds.): Fpga-based real-time simulation of finite-element analysis permanent magnet synchronous machine drives. In: IEEE Power Electronics Specialists Conference (2007). https://doi.org/10.1109/PESC.2007.4342109
Janous, S., Talla, J., Kosan, T., Peroutka, Z.: FPGA-based real-time HIL simulator of permanent magnet synchronous motor drive. In: IEEE 19th International Power Electronics and Motion Control Conference, pp. 552–558 (2021). https://doi.org/10.1109/PEMC48073.2021.9432517
Mishra, I., Tripathi, R.N., Singh, V.K., Hanamoto, T. (eds.): A hardware-in-the-loop simulation approach for analysis of permanent magnet synchronous motor drive. In: 10th International Conference on Power Electronics ECCE Asia (2019). https://doi.org/10.23919/ICPE2019-ECCEAsia42246.2019.8797143
Roshandel Tavana, N., Dinavahi, V.: A general framework for FPGA-based real-time emulation of electrical machines for HIL applications. IEEE Trans. Ind. Electron. 62(4), 2041–2053 (2015). https://doi.org/10.1109/TIE.2014.2361314
Luo, G., Zhang, R., Chen, Z., Tu, W., Zhang, S., Kennel, R.: A novel nonlinear modeling method for permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 63(10), 6490–6498 (2016). https://doi.org/10.1109/TIE.2016.2578839
Scheer, R., Bergheim, Y., Heintges, D., Rahner, N., Gries, R., Andert, J.: An FPGA-based real-time spatial harmonics model of a PMSM considering iron losses and the thermal impact. IEEE Trans. Transp. Electr. 8, 1289–1301 (2021). https://doi.org/10.1109/TTE.2021.3119460
Gemaßmer, T.: Effiziente und dynamische drehmomenteinprägung in hoch ausgenutzten synchronmaschinen mit eingebetteten magneten. PhD thesis, Karlsruher Instituts für Technologie, Karlsruher (12. 02. 2015). https://doi.org/10.5445/KSP/1000046666
Acknowledgements
Research reported in this article was conducted in part in the context of the HyNets4All project, supported by the European Regional Development Fund (ERDF).
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all the authors, the corresponding author states that there is no conflict of interest.
Additional information
Academic Editor: Peng Dong
Open Access funding enabled and organized by Projekt DEAL.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Scheer, R., Bergheim, Y., Aleff, S. et al. A Virtual Prototyping Approach for Development of PMSM on Real-Time Platforms: A Case Study on Temperature Sensitivity. Automot. Innov. 5, 285–298 (2022). https://doi.org/10.1007/s42154-022-00186-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42154-022-00186-0