
Abstract
The interest in advanced robotic equipment in construction has increased in recent years. However, actual industry adoption lags behind—and fundamental considerations might be at fault. To date, little scholarship in Architecture, Engineering and Construction (AEC) addresses the stakeholder perception of construction robot design. Therefore, we ask, “How do visual attributes of a construction robot influence the perception of AEC stakeholders?” To conduct our study, we performed a bibliometric analysis on a corpus of 59 scholarly research articles, 5 expert interviews and created and pre-validated a robot database of 50 robot pictures classified on their visual attributes of morphology, color and material. As a result, we present a study with 161 construction professionals who judged these robots based on three visual main criteria: ease of use, work task adaptability and risk of job loss. In total, more than 6500 data points are collected and analyzed using binary logistic regression. The five key findings are that construction professionals perceive that: (1) Zoomorphic (animal-like) robots are easier to use than anthropomorphic (human-like) or mechanomorphic (machine-like) robots, (2) Bright robots are easier to use than dark robots, (3) Zoomorphic and anthropomorphic robots are more multifunctional than mechanomorphic robots, (4) Anthropomorphic and mechanomorphic robots are more of a risk to job loss than zoomorphic robots, and (5) Dark robots are more of a risk to job loss than bright ones. These results are important for academics and practitioners that aim to increase the likelihood of positive stakeholder perception of robots in construction. The findings can further help to develop specific user-centered design principles. Such implementation can reduce the risk of construction professionals rejecting future robots when they are introduced at the AEC job site.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Worker and industry perception of robots can greatly influence their adoption in practice. For this reason, the actual appearance and presentation of robots is important. What constitutes good robot design? According to a study by DiSalvo et al. (2002), the presence of facial features greatly influences the human perception, or first impression, of robots. The study further elaborated the threshold in which perception is positive and when it is “uncanny”, or too human. General user principles, such as the Technology Acceptance Model (TAM, Davis 1989) aim at mitigating the risk of technology rejection and abandonment by the user (de Graaf et al. 2017). Some more recent studies in social sciences and health care robotics have further investigated the design attributes with a focus on the user perception of the robots’ visual attributes (Reeves et al. 2020; Klueber and Onnasch 2022).
Concurrently, there is a strongly increasing trend of robotic applications in the construction sector. In 2021, a leading producer of robotic equipment and automation technologies conducted an international survey with 1900 small, medium and large construction and associated businesses, such as planners (architects, designers), component suppliers, contractor, subcontractors and consultants (ABB Robotics 2021 Construction Survey). The majority (91%) of respondents predicted a skills crisis in the construction sector by 2030. 81% of the respondents (or more than 1500 companies) will introduce robotic systems in the next 10 years, out of which 65% stated that they will introduce on-site robotics, compared to only 20% for off-site fabrication and merely 15% for 3D-printing. Participants identified concerns on health and safety, and environmental distress as catalysts for accelerated investments into construction robotics.
Current construction robots are commonly classified as single-task robots, general purpose robots and integrated automated robotic systems (Pan and Pan 2020; Garcia de Soto and Skibniewski 2020). Due to the limited capacity (e.g. autonomy, payload, navigation) of today’s robotic systems, Human–Robot Systems (HRS, e.g. collaborative robots) can play an important role for the low to medium size batch production predominant in AEC. Multiple designs have been proposed over the years, some of which aim to combine performance and human safety (Zinn et al. 2004). The level of interaction and collaboration varies according to HRS technology and application (Hentout et al. 2019). Recent academic studies by Kyjanek et al. (2019) and Mitterberger et al. (2022) investigate interactive fabrication process application for HRS in AEC that include the use of augmented reality interfaces for industrial robots in on-site construction and prefabrication settings, such as an off-site factory floor. Brosque and Fischer (2022) demonstrated that construction robots can have a positive impact on human safety. Their study further indicates that project quality, schedule and costs can be positively influenced by the introduction of construction robotics.
However, psychological perspectives on robotics and automation in construction have not gained as much attention in AEC scholarship when compared to research focusing on technology development and application engineering. Today’s construction field is still a highly manual work industry and it is not clear how the current human workforce will use, accept or adopt new robotic technology (Muishout et al. 2020). More particularly, construction field workers are prone to risk-taking behaviour (Low et al. 2019) and reluctant towards vocational skill training (Wang et al. 2018). Currently, we lack an understanding of individual AEC stakeholder groups’ perception of HRS. For greater HRS adoption in construction, one fundamental question is to understand how user acceptance of and engagement with robots may be impacted by visual and morphological aspects of the system’s design.
Therefore, this empirical study seeks to identify relationships between objective, visual attributes and individual, subjective perceptions of construction robots. The insights may suggest best practices for existing and emerging construction robotic design considerations to help increase the likelihood of positive AEC user perception, acceptance and ultimately adoption using participatory design principles (Muller et al. 1993), e.g. for and with construction worker safety in mind (Gambatese et al. 2005). Additionally, principles of work design and hedonic motivation should be considered as worker’s “safety” should not only focus on the avoidance of physical danger.
2 Theoretical point of departure
Muishout et al. (2020) conducted exploratory interviews with ten stakeholders (research academics, 3D-concrete-printing companies and labour union staff) in the Dutch AEC sector. The authors found that there is still an unclear general definition of the term “robotisation” and related socio-economic factors amongst these stakeholders. According to a study with 63 construction project managers by Sam et al. (2022), respondents were more likely to consider a robot as a teammate, as opposed to a machine, tool or equipment when the robot moved in a predictable way, was considered durable, remained constantly active, took its surroundings into account before moving, simply worked well when alongside human workers, was reliable and made the particular task more predictable.
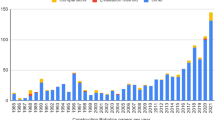
To further identify trends in robotic construction scholarship across several decades (1988–2021), we manually collected 59 related academic articles (see supplementary materials) in the field of AEC for a time-trend analysis. We added robot* and construction to the list of stop words. The results here are two-fold: The term human has not been in the Top 10 most frequent words in most periods, but ranked 2nd in 2020 and 1st in 2021 (Table 1). Second, we are able to find correlations of keywords. For example, the term human showcases strong bibliometric correlation with the terms characteristic, sequence, intelligence and sensor (0.99), hand and performance (0.97), actions (0.94) and services (0.90). Surprisingly, however, our query shows that the term design was only placed 8th before 2000 and 2008–2014, 7th in 2018 and is not present in any of the more recent articles. This indicates that even though human has become a more frequently used term in our corpus, the term design has eventually dropped out. The terms perception, impression or ethic* could not be found in any of the most frequent words in this data set but have been discussed in scholarship outside of AEC.
For example, Knight (2014) promoted five partnership principles of robotic design, namely to: (1) Implement safeguards to ensure robots augment human experience rather than increase social barriers. (2) Account for the consequences of a robot’s social abilities when designing industrial guidelines and technologies. (3) Consider regulating the machine’s treatment as well as encouraging positive experiences for the user. (4) Design some robots to be intentionally machine-like since humans view robots as agents and react to them socially. (5) Decide whether a more machine-like or human-like design is most beneficial for the human context.
As construction robotics enter the growth phase on their way to ubiquity (Bock 2015), it is important to discuss the social-economic impact of those technologies on the workforce. Recent estimates state that roughly 50% of all construction tasks can be automated. This would indicate a replacement or displacement of 2.7 million construction workers in the US alone until 2057, and a reduced labor income by a net of US$31.5 billion (Manzo et al. 2018). At last, automation and new technologies in construction will challenge many existing roles and create new ones, eventually attracting an emerging generation of tech-savvy workers to AEC (Garcia de Soto et al. 2019). Technologies have been transforming work throughout the economy for many decades (Badham 2009). In some cases, technology can assist workers in performing jobs faster or more efficiently. In other cases, however, some human workers are simply being replaced by machines. According to Rumberger (1984), job opportunities are put at risk by a combination of forces, out of which high technology and automation are the most threatening. Furthermore, poor physical health and mental distress are predicting indicators of long-term unemployment in construction worker cohorts (Leino-Arjas et al. 1999), perpetually increasing the worker’s stress levels and impacting the sector’s productivity negatively.
3 Problem statement and research gap
Today, users may encounter cartoon-like, googly eyes placed on field robots, including in the context of construction (Fig. 1) .

Googly eyes on Dusty Robotics Prototype (2020)
Although this simple strategy proves to be even successful with inanimate objects (Powell et al. 2012), it indicates a limited understanding of user-driven design attributes. Scholars such as van de Poel (2013a) have widely discussed that new technology development should be considered a social experiment, not an engineering task. Therefore, it is paramount to understand that when social and psychological considerations are not addressed, human workers might refuse to collaborate with or abandon such systems in the long term (e.g. de Graaf et al. 2017).
Given the delicate position of the construction industry facing automation and the related fear of job loss, a better understanding of barriers to the introduction of robots (incl. HRS) for the construction field should be considered important and urgent. Both studies by Muishout et al. (2020) and Sam et al. (2022) provide valuable insights into the human systems engineering (HSE) subject of robots in construction. The main restrictions, however, are the limited numbers of stakeholder groups (only four) and robotic systems under study (only three). Looking beyond AEC scholarship, Klueber and Onnasch (2022) have conducted a study to research the perceived “likeability” of feature combinations for social care robots in healthcare. The image-based online survey design combined and compared appearance attributes (human-like, animal-like, machine-like), size (small, large) and communication (speech, sound, text) using best-worst scaling. So far, to the best of knowledge, no similar study has been conducted on the appearance of construction robots with construction professionals.
4 Research question and hypothesis
Accordingly, we pose the research question: How do visual attributes influence AEC stakeholders’ perception of construction robots? Further, we address the need to understand key attributes and key perceptions of particular construction robots from various viewpoints. Hence, we formulate our main hypothesis: “The attributes morphology, color and material have an impact on the defined perceptions of ease of use, work task adaptability and risk of job loss in various stakeholder groups within the AEC industry.”
5 Methods
The study by Reeves et al. (2020) studied social robot attributes and perceptions in two separate studies that are based on a self-developed image database. Similarly, our methodology consists of a research approach involving the following steps: (1) Qualitative data collection via semi-structured interviews, (2) Definition of attributes and perceptions, (3) Development of image database, (4) Attribute validation study of defined attributes, (5) Quantitative perception survey with defined perceptions, (6) Statistical data processing and (7) Presentation of results and interpretation (Fig. 2).

Flowchart of the applied research method
(1) Interviews First, we conducted five qualitative, semi-structured interviews with five experts in different sub-areas of AEC (architects, professors, product- and branch managers, researchers and engineers). The interview duration ranged between 30 and 45 min. Recruiting of the participants was done by convenience and proximity in the research network on a voluntary basis and without monetary compensation. The interviews were conducted in German and English and transcribed verbatim leading to 21 pages of interviews. The interview questions are available in Appendix 1. Table 2 shows the evaluated themes that were collected during the interviews. Productivity and price/cost—all economic viability terms—are not considered due to them not primarily being visual objectively measurable.
(2) Based on the interviews, key characteristics are evaluated qualitatively: Objective features are referred to as “attributes”, whereas subjective features are referred to as “perceptions”. Table 3 illustrates the chosen set of three objective attributes and subjective perception chosen due to a combination of interview results and literature review. Our final research methodology considers three attributes with each two to three expressions, such as in the study design of Klueber and Onnasch (2022): (a) Form factor, or Morphology: anthropomorphic (human-like), zoomorphic (animal-like), mechanomorphic (machine-like). (b) Color: bright, dark. (c) Material: soft, hard. Perceptions: (d) Ease of use (inspired by Davis 1989). (e) Work task adaptability (or production flexibility, such as studied by Hartmann et al. 2009) and (f) Risk of job loss (Brand 2015).
(3) Image database Inspired by the Stanford Social Robot Database (2020) we developed a database of 50 construction robotsFootnote 1; 86% are existing machines, 14% are virtual visualisations and do not exist (yet). Surveys that rely on images are easy to understand, more engaging and thus tend to lead to higher response rates (Treiblmaier and Filzmoser 2011). The images in the database are subjectively chosen by the authors to achieve a balance according to the three defined attributes and expressions, e.g.: for each robot of attribute 1, expression 1 there shall be one of attribute 1, expression 2. The images are prepared in a resolution of 400x400px. Human operators, other background objects, brands and the environment have been removed to standardise the visual stimuli and thereby stimulate a spontaneous and mostly unbiased perception. Figure 3 shows a selection of the database entries. The full data set can be found in Appendix 3.

Excerpt of the developed robot picture database (n = 50)
(4) Attribute validation study In this first survey, the robots’ visual characteristics are measured. We developed a quantitative online study on the survey platform Qualtrics\(^{\mathrm{TM}}\) that collected data on the attributes of 20 randomly chosen pictures of the 50 robots in the database. No relation to the broader AEC sector was required for the participants and recruitment occurred by convenience within private networks. This survey used the following items for validation by the participants: Morphology (anthropomorphic, zoomorphic, mechanomorphic), color (bright, dark), material (soft, hard) and was conducted during 4 weeks in Spring 2022. The survey was available in German and English with an estimated duration of 15–20 min. A cut-off value of 0.8 is used to determine if an attribute can be treated as objective by the majority of participants (e.g. see Gaul et al. 2010): Attribute expressions with less than 80% agreement between participants were considered unclear in our data set and were not further used for analysis.
(5) Quantitative perception survey For an eight week period in Spring 2022, we conducted a quantitative study on the same platform. For this survey, however, participants from the AEC industry were recruited via direct email outreach to more than 200 Swiss construction companies, physical posters at construction sites and direct messages within the authors’ extended professional, social and research networks. The survey was designed to be intuitive and interactive for the participants and responses were collected via a 5-point Likert scale. Participants were shown a random sample of 20 of the 50 robot images in the data set to reach an assumed completion time of 15–20 min. They were asked to judge three predefined perceptions in the context of the construction industry: (a) Ease of use: How easy to use does the robot appear to be? (b) Work task adaptability: How flexible is the application of the robot? In particular, we asked if the machine appears to have only a single or several use cases. (c) Risk of job loss: How likely is the robot to replace humans?
(6) Statistical data processing Binary logistic regression (BLR) is used to estimate the relationship between one or more independent variables and a binary dependent variable. BLR is chosen to be appropriate to prove or disprove our binary outcome hypothesis as probabilities are bounded by 0 and 1. In our approach, both independent and dependent variables are dichotomous (mutually exclusive, collectively exhaustive). By evaluating Exp(b), or the Odd Ratio, conclusions can be drawn on the relationship between attributes and perceptions which are the main interest of this study. Further information on BLR can be found in Appendix 2. Raw survey data are exported from the Qualtrics\(^{\mathrm{TM}}\) platform, imported into IBM\(^{\mathrm{TM}}\) SPSS Statistics Software and prepared for BLR analysis. Systematic errors are evaluated by scanning the data for systematic response bias. This is done by evaluating the standard deviation from every recorded response. If the standard deviation SD = 0, the response is considered invalid since the participant always chose the same answer for the entire survey. Incomplete responses of the designed online survey platform are considered “completely at random”. According to Leung and Qin (2006) the missingness of data under completely random state can be ignored and, therefore, are kept in the data set. To compare the different characteristics with BLR, every attribute type is coded with a binary parameter: Consequently, the 5-point Likert scale of the quantitative perception survey is compressed into net positive and net negative binary values while neutral values are ignored.
6 Results
Table 4 shows the number of expressions that were collected by the attribute validation study (N = 142) with a cut-off value of 0.8. Note that most robots are considered of mechanomorphic morphology and only one robot is considered soft. This emphasizes the importance of the validation of the stimulus material for experimental settings.
Table 5 shows the results of the attribute validation study for ten (out of 50) prominent examples of construction robots and common equipment. The full table with the results of the attribute validation study and quantitative perception survey can be found in Appendix 3.
Quantitative perception survey: In total, 251 participants of 12 different stakeholder groups participated in the subjective perception survey. Table 6 shows the professional distribution of the respondents, some of which reported more than one profession. 60 participants never completed the entire survey, 25 did not specify a stakeholder group and 5 created an invalid systematic error. Thus, a total of 161 valid responses are collected and analyzed. The respondents’ demographics are presented in Table 7. The majority (70%) of the survey respondents are from or reside in Switzerland.
Table 8 shows the results of the quantitative perception survey for ten (out of 50) prominent examples of construction robots and common equipment with the full table in Appendix 3.
Figure 4 consolidates the results of the perception of ease of use and work task adaptability. Note here that dimensions are qualitatively scaled to according min/max values and do not represent absolute values. The detailed table including standard deviation and variance can be found in the supplementary materials.

Visualisation of robots’ mean perceptions (x = Ease of use, y = Work task adaptability (N = 161), M. Baumann
Figure 5 consolidates the results of the perception of ease of use and risk of job loss using the same visualisation approach.

Visualisation of robots’ mean perceptions (x = Ease of use, y = Risk of job loss (N = 161), M. Baumann
Table 9 indicates low correlation between the attributes and thus proves the validity of using BLR as statistical tool for the analysis of our data set. The detailed descriptive statistic analysis can be found in Appendix 2.
Inferential statistics: All attribute expressions are then cross-compared in three different parameter calculation iterations ((1)–(3)): Morphology (1): Compares the indicator anthropomorphic to the coded variable of BLR iteration (1), which is zoomorphic. Morphology (2): Compares the indicator mechanomorphic to the coded variable of BLR iteration (2), which is anthropomorphic. Morphology (3): Compares the indicator mechanomorphic to the coded variable of BLR iteration (3), which is zoomorphic. Color (1): Compares the indicator bright to the coded variable of BLR iteration (1), which is dark. Material (1): Compares the indicator hard to the coded variable of BLR iteration (1), which is soft (Appendix 2).
The number of analyzed stimuli (n) is shown in the description of each table below. Note that the number of stimuli (n) is higher than the number of participants (N). This is because each participant judged multiple different pictures.
When computing the responses of all participants regarding the perception of ease of use, three significant (\(p<0.05\)) findings are supported by different stakeholder groups (n = 5): Exp(b) = 2.6 suggests that the odds of zoomorphic robots are 2.6 times higher to be judged as easy to use than robots in the anthropomorphic group. Exp(b) = 2.3 suggests that the odds of zoomorphic robots are 2.3 times higher to be judged as easy to use than robots in the mechanomorphic group. Exp(b) = 1.7 suggests that the odds of bright robots are 1.7 times more likely to be perceived as easy to use than dark robots (Appendix 2).
When computing the responses of all participants regarding the perception work task adaptability, two significant (\(p<0.05\)) findings are supported by different stakeholder groups (n = 5): Exp(b) = 1.7 suggests that the odds of anthropomorphic robots are 1.7 times higher to be judged as more multifunctional than robots in the mechanomorphic group. Exp(b) = 1.6 suggests that the odds of zoomorphic robots are 1.6 times higher to be judged as more multifunctional than robots in the mechanomorphic group (Appendix 2).
When computing the responses of all participants regarding the perception risk of job loss, three significant (\(p<0.05\)) findings are supported by different stakeholder groups (n = 5): Exp(b) = 2.0 suggests that the odds of anthropomorphic robots are twice as likely to be perceived as a risk to job loss than zoomorphic robots. Exp(b) = 1.9 suggests that the odds of mechanomorphic robots are 1.9 times as likely to be perceived as a risk to job loss than zoomorphic robots. Exp(b) = 1.5 suggests that the odds of dark robots are 1.5 times as likely to be perceived as a risk to job loss of human workers than robots that are bright (Appendix 2).
7 Key findings
Table 10 summarizes the study’s five key findings. They are not the only significant findings, but those are the findings that are validated by multiple stakeholder groups as well as the total sample group. The presented data of these studies show the results of the total participating sample group.
While the results of most stakeholder groups point in the same direction, there are four exceptions among the different AEC stakeholders: Electrical and plumbing workers perceive bright robots 6.6 times more adaptable to work tasks than dark ones. Painting and glazing workers are seven times as likely to perceive anthropomorphic robots as adaptable to work tasks as mechanomorphic ones. Construction managers are 2.6 times more likely to perceive anthropomorphic robots as a risk to job loss than mechanomorphic ones. Painting and glazing workers are 7.2 times more likely to perceive anthropomorphic robots as a risk to job loss than mechanomorphic robots. These values are notably higher than previous stated key findings, yet there is a limited sample size in these stakeholder groups.
In addition, 191 participants from both surveys voluntarily answered an additional prompt on the difference between the terms robot and machine. The responses have been grouped qualitatively in the five following themes in Table 11. However, some respondents have stated that robots and machines are alike. More attention may be given to understanding these emerging themes.
Further, 30 participants from the quantitative perception survey indicated prior experience working with robots in a second voluntary item. No a priori hypothesis on the participants’ former experience with robots was formed. We controlled for experience and could not find a significant difference of participants perception regarding their previous experience with robots. This is based on one-tailed, independent two sample homoscedastic t-tests (assuming equal variance) that result in: Ease of use: t(96) = 0.76, p = .23; Work task adaptability: t(96) = − 0.31; p = .38, Risk of job loss: t(96) = 0.37, p = .36. The detailed data analysis can be found in the supplementary materials.
8 Discussion and limitations
Our study participant cohort may be positively skewed towards technological innovation due to their age: The participants were younger than the construction industry average in Germany (Gerlmaier and Latniak 2012). Further, the study had more female participation than the industry average in Germany (Hauptverband der Deutschen Bauindustrie 2022). We recognize these numbers are from a neighbouring country but expect similar averages across Germany, Austria and Switzerland. A validation study across more dispersed geographical locations should be conducted to find similarities and differences when studying construction robotics (e.g. Broehl et al. 2019).
Based on our study it is not clear what type of robotic system is considered a toy, device, tool, machine, robot or even a co-worker by the various stakeholder groups. In our study design we removed not only the context of the construction robot (such as the environment, control panels, human operator and brand names) but also its particular task allocation which might be critical in the scenario of a single task construction robot. The introduction of one or more specific construction tasks and collaboration scenarios will increase the understanding of user needs for such construction robots. Due to statistical considerations the study was limited to three attributes and three perceptions. We see the possibility to conduct a similar study design with more variables, given access to a bigger sample group. In addition, the use of continuous rating scales instead of Likert scales in online surveys has been proposed by scholars and could be implemented to further reduce statistical noise (Treiblmaier and Filzmoser 2011).
9 Conclusion and outlook
Our studies show that construction robot morphology has a statistically significant impact on these three perceptions: ease of use, work task adaptability and risk of job loss. Color has a statistically significant impact on the perception of risk of job loss: It is shown that brighter colors have a less negative impact on this perception. No analysis on the material can be expressed due to insufficient stimuli responses on this attribute. It is assumed that ease of use and work task adaptability are desired perceptions in robots, while the risk of job loss is an undesired perception. Our data also show that there is no superior morphology expression. In fact, some attributes of a single robot might perform well in one or two perceptions but fail the third. Depending on the particular requirements of the robot under study, the morphology should be determined individually. In addition, less represented stakeholder groups did not generate statistically significant relations between all attributes and perceptions.
Prospectively we envision the use of configurators as supplementary design tools to help conceptualize novel, modular robotic systems according to well-perceived visual attributes, beyond their purely technical engineering benchmarks. Scholars have coined the term Value Sensitive Design (VSD) to describe the incorporating values of ethical importance into engineering design (van de Poel 2013b). Therefore, the findings of this research study may support these user-centric, industrial design considerations for ongoing and future developments in the field of construction robotics. For example, into one or several versions of ETH’s “In-Situ Fabricator 2” concept (Giftthaler et al. 2017) or Rethink Robotics’ Baxter (2012) that is tailored to specific stakeholder groups in AEC—or perhaps one that is on average well perceived by all. However, to increase the likelihood of positive acceptance of robotics in the construction sector, the HRS must be deliberately designed. Additional socio-technical studies on the user’s expectations and acceptance, beyond visual perception, are required: For example, to extend or combine the research results with other, existing frameworks such the Unified Theory of Acceptance and Use of Technology (UTAUT, Venkatesh et al. 2003). Further human-centred work design principles such as job resources (levels of control and autonomy, skill use and task variety, job feedback, relational aspects) and job demands (e.g. performance monitoring) require direct integration in the development of the construction robots (Parker and Grote 2020).
Data availability statement
Supplementary material available at https://doi.org/10.1007/s41693-022-00087-y.
Notes
For the sake of readability throughout this manuscript the term “robot” is used for both “robot” and “machine” images in the developed database. The Discussion section also further highlights the ambiguity of terms and the need for clarification in future research.
References
ABB (2021) ABB robotics 2021 construction survey. https://express.adobe.com/page/ 5QaTFLrupXbYh/
Badham RJ (2009) Technology and the transformation of work. In Ackroyd S et al (eds) The Oxford handbook of work and organization (2006; online edn, Oxford Academic, 2 Sept.). https://doi.org/10.1093/oxfordhb/9780199299249.003.0007
Bhandari P (2021) An easy introduction to statistical significance. https://www.scribbr.com/statistics/statistical-significance/
Bock T (2015) Construction robotics enabling innovative disruption and social supportability. In: Malaska M, Heikkilä R (eds) Proceedings of the 32nd international symposium on automation and robotics in construction and mining (ISARC 2015). : International Association for Automation and Robotics in Construction (IAARC), Oulu, Finland. p 1–11
Bousterhout (2014) Dealing with ugly data: generalized estimating equations (GEE). https://wildlifesnpits.wordpress.com/2014/10/ 24/dealing-with-ugly-data-generalized-estimating-equations-gee/
Brand JE (2015) The far-reaching impact of job loss and unemployment. Ann Rev Sociol 41:359–375. https://doi.org/10.1146/annurev-soc-071913-043237
Broehl C, Nelles J, Brandl C, Mertens A, Nitsch V (2019) Human–robot collaboration acceptance model: development and comparison for Germany, Japan, China and the USA. Int J Soc Robot 11:709–726. https://doi.org/10.1007/s12369-019-00593-0
Brosque C, Fischer M (2022) Safety, quality, schedule, and cost impacts of ten construction robots. Constr Robot. https://doi.org/10.1007/s41693-022-00072-5
Calkins (2005) Applied statistics—lesson 5 correlation coefficients. https://www.andrews.edu/~calkins/math/edrm611/edrm05.htm
Crowson M (2019) Binary logistic regression using SPSS. https://www.youtube.com/ watch?v=cpWSSJHuT2s
Davis FD (1989) Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q 13(3):319–340. https://doi.org/10.2307/249008
de Graaf M, Ben Allouch S, & van Dijk J (2017) Why do they refuse to use my robot? Reasons for non-use derived from a long-term home study. In: Proceedings of the 2017 ACM/IEEE international conference on human–robot interaction. Vienna, Austria, p 224–233. https://doi.org/10.1145/2909824.3020236
DiSalvo CF, Gemperle F, Forlizzi J, Kiesler S (2002) All robots are not created equal: the design and perception of humanoid robot heads. In: Proceedings of the 4th conference on designing interactive systems: processes, practices, methods, and techniques. London, England, p 321–326. https://doi.org/10.1145/778712.778756
Dusty Robotics (2020) 2020 Construction trends forecast. https://www.dustyrobotics.com/blog/2020-construction-trends-forecast
Gallo A (2016) A refresher on statistical significance. https://hbr.org/2016/02/a-refresher-on-statistical-significance
Gambatese JA, Behm M, Hinze JW (2005) Viability of designing for construction worker safety. J Constr Engi Manag 131/9. https://doi.org/10.1061/(ASCE)0733-9364(2005)131:9(1029)
Garcia de Soto N, Skibniewski MJ (2020) Future of robotics and automation in construction. In: Sawhney A, Riley M, Irizarry J (eds) Construction 4.0 an innovation platform for the built environment. Routledge, pp 289–306. https://doi.org/10.1201/9780429398100
Garcia de Soto B, Agustí-Juan I, Joss S, Hunhevicz J (2019) Implications of construction 4.0 to the workforce and organizational structures. Int J Constr Manag 22(2):205–217. https://doi.org/10.1080/15623599.2019.1616414
Gerlmaier A, Latniak E (2012) Arbeiten in der Bauwirtschaft – wer schafft es bis zum regulären Renteneintritt und wer nicht?: Risikoindikatoren und alterskritische Berufe. In IAQ-report, vol 2012, issue 4. https://doi.org/10.17185/duepublico/45682
Gaul WA, Geyer-Schulz A, Schmidt-Thieme L, Kunze J (2010) Challenges at the interface of data analysis, computer science, and optimization. In: Proceedings of the 34th annual conference of the Gesellschaft für Klassifikation e. V., Karlsruhe, July 21–23, 2010
Giftthaler M, Sandy T, Doerfler K et al (2017) Mobile robotic fabrication at 1:1 scale: the in situ fabricator. Constr Robot 1:3–14. https://doi.org/10.1007/s41693-017-0003-5
Hartmann B, Schauer C, Link N (2009) Worker behavior interpretation for flexible production. Int J Ind Manuf Eng 3(10):1224–1232. https://doi.org/10.5281/zenodo.1076380
Hauptverband der Deutschen Bauindustrie (2022) Zahlen und Fakten zur Frau am Bau. https://www.bauindustrie.de/pm/zahlen-und-fakten-zur-frau-am-bau
Hentout A, Aouache M, Maoudj A, Akli I (2019) Human-robot interaction in industrial collaborative robotics: a literature review of the decade 2008–2017. Adv Robot 33(15–16):764–799. https://doi.org/10.1080/01691864.2019.1636714
Ilola E (2018) A beginner’s guide to standard deviation and standard error. https://s4be.cochrane.org/blog/2018/09/26/a-beginners-guide-to-standard-deviation-and-standard-error/
Kenton W (2021) Standard error. https://www.investopedia.com/terms/s/ standard-error.asp
Klueber K, Onnasch L (2022) Appearance is not everything–preferred feature combinations for care robots. Comput Hum Behav 128:107128. https://doi.org/10.1016/j.chb.2021.107128
Knight H (2014) How humans respond to robots: building public policy through good design. Brookings. https://www.brookings.edu/wp-content/uploads/2014/07/HumanRobot-PartnershipsR2.pdf
Kyjanek O, Al Bahar B, Vasey L, Wannemacher B, Menges A (2019) Implementation of an augmented reality AR workflow for human robot collaboration in timber prefabrication. In: Al-Hussein M (ed) Proceedings of the 36th international symposium on automation and robotics in construction (ISARC), p 1223–1230. https://doi.org/10.22260/ISARC2019/0164
Leung DHY, Qin J (2006) Analysing survey data with incomplete responses by using a method based on empirical likelihood. J R Stat Soc Ser C Appl Stat 55:379–396. https://doi.org/10.1111/j.1467-9876.2006.00542.x
Leino-Arjas P, Liira J, Mutanen P, Malmivaara A, Matikainen E (1999) Predictors and consequences of unemployment among construction workers: prospective cohort study. BMJ 319(7210):600–605. https://doi.org/10.1136/bmj.319.7210.600
Low BKL, Man SS, Chan AHS, Alabdulkarim S (2019) Construction worker risk-taking behavior model with individual and organizational factors. Environ Res Public Health 16:1335. https://doi.org/10.3390/ijerph16081335
Manzo J, Manzo IV FM, Bruno R (2018) The potential economic consequences of a highly automated construction industry. What if construction becomes the next manufacturing? https://midwestepi.files.wordpress.com/2018/01/the-economic-consequences-of-a-highly-automated-construction-industry-final.pdf
Mitterberger D, Ercan JennyS, Vasey L, Lloret-Fritschi E, Aejmelaeus-Lindstroem P, Gramazio F, Kohler M (2022) Interactive robotic plastering: augmented interactive design and fabrication for on-site robotic plastering. In: Proceedings of the 2022 CHI conference on human factors in computing systems. New Orleans, LA, USA. https://doi.org/10.1145/3491102.3501842
Muishout CE, Coggins TN, Schipper HR (2020) More than meets the eye? Robotisation and normativity in the dutch construction industry. In: Bos FP, Lucas SS, Wolfs RJM, Salet TAM (eds) Second RILEM international conference on concrete and digital fabrication. Springer International Publishing, Cham, p 839–851
Muller MJ, Wildman DM, White EA (1993) Taxonomy of PD practices: a brief practitioner’s guide. Commun ACM 36(4):24–28
Pan M, Pan W (2020) Understanding the determinants of construction robot adoption: perspective of building contractors. J Constr Eng Manag 146(5):04020040. https://doi.org/10.1061/(ASCE)CO.1943-7862.0001821
Parker SK, Grote G (2020) Automation, algorithms, and beyond: why work design matters more than ever in a digital world. Appl Psychol. https://doi.org/10.1111/apps.12241
Powell KL, Roberts G, Nettle D (2012) Eye images increase charitable donations: evidence from an opportunistic field experiment in a supermarket. Ethology 118:1096–1101. https://doi.org/10.1111/eth.12011
Reeves B, Hancock J, Liu SunnyX (2020) Social robots are like real people: first impressions, attributes, and stereotyping of social robots. Technol Mind Behav 1(1). https://doi.org/10.1037/tmb0000018
Rethink Robotics (2012) Baxter. https://robots.ieee.org/robots/baxter/
Rumberger RW (1984) High technology and job loss. Technol Soc 6(4):263–284. https://doi.org/10.1016/0160-791X(84)90022-8
Sam M, Franz B, Sey-Taylor E, McCarty C (2022) Evaluating the perception of human-robot collaboration among construction project managers. In: Construction research congress, p 550–559. https://doi.org/10.1061/9780784483961.058
Stanford University (2020) Stanford social robots database. https://goo.gl/Gqpzkx
Treiblmaier H, Filzmoser, P (01 2011). Benefits from using continuous rating scales in online survey research. https://doi.org/10.13140/RG.2.1.2899.6643
van de Poel I (2013) Why new technologies should be conceived as social experiments. Ethics Policy Environ 16(3):352–355. https://doi.org/10.1080/21550085.2013.844575
van de Poel I (2013) Translating values into design requirements. In: Michelfelder D, McCarthy N, Goldberg D (eds) Philosophy and engineering: reflections on practice, principles and process. Philosophy of engineering and technology, vol 15. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-7762-0_20
Venkatesh V, Morris MG, Davis GB, Davis FD (2003) User acceptance of information technology: toward a unified view. MIS Q 27(3):425–478
Walther B (2020) Binaer logistische Regression in SPSS mit einem metrischen Praediktor. https://bjoernwalther.com/binaer-logistische-regression-in-spss-mit-einem-metrischen-praediktor/
Wang X, Wang X, Huang Y (2018) Chinese construction worker reluctance toward vocational skill training. J Eng Des Technol 16(1):155–171. https://doi.org/10.1108/JEDT-06-2018-0100
Zinn M, Roth B, Khatib O, Salisbury JK (2004) A new actuation approach for human friendly robot design. Int J Robot Res 23(4–5):379–398. https://doi.org/10.1177/0278364904042193
Acknowledgements
The qualitative interviews, attribute validation study, quantitative perception survey and statistical analysis were conducted by Micha Baumann as part of a master thesis in Civil Engineering at ETH Zurich from 2021 to 2022. The bibliometric research was conducted by Melanie Uhlmann as a semester project in the same degree program in 2021. Both studies were continuously supervised by Prof. Dr. Daniel M. Hall, and PhD researchers Aniko Kahlert and Alexander N. Walzer. We further direct our gratitude to Mrs. Schmid of the Ethics Commission at ETH Zurich for concise feedback on the preparation of the study, the National Research Center for Competence in Research in Digital Fabrication and the Department of Civil, Environmental and Geomatic Engineering at ETH Zurich for enabling our interdisciplinary work. Konrad Graser provided valuable suggestions on the preliminary draft of this article. Lastly, we want to acknowledge the initial discussion between Prof. Dr. Ena Lloret-Fritschi and Prof. Dr. Daniel M. Hall after a presentation by Chantal E. Muishout of TU Delft at the Second RILEM International Conference on Concrete and Digital Fabrication in 2020, which sparked the idea of working on the presented research.
Funding
Open access funding provided by Swiss Federal Institute of Technology Zurich.
Author information
Authors and Affiliations
Contributions
ANW: Resources, writing—original draft, visualization, supervision, project administration. AK: Methodology, formal analysis, resources, writing—review and editing, Supervision. MB: Methodology, software, validation, formal analysis, investigation, resources, data curation, writing—review and editing, visualization. MU: Methodology, software, validation, formal analysis, investigation, resources, data curation, writing—review and editing, visualization. LV: Resources, writing—review and editing. DMH: Conceptualization, resources, writing–review and editing, supervision, project administration.
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflicts of interest to disclose.
Ethics approval
The study was approved in advance and without reservations by the ETH Zurich Ethics Commission under the ID “EK 2021-N-184: Industry Perception of Construction Robotics”.
Consent to participate
Participants have received a full information sheet and gave individual consent prior to participation.
Consent for publication
Participants gave individual consent to use the collected data for publication.
Code availability
Code and study data sets are available in the supplementary materials: http://hdl.handle.net/20.500.11850/582919.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
41693_2022_87_MOESM1_ESM.pdf
Supplementary file1 The supplementary materials include: Bibliometric analysis literature corpus and R Code, full robot picture database, raw data sets of the attribute validation study and the quantitative perception survey (with detailed results table), and the t-test regarding prior experience with robots. (PDF 47 KB)
Appendices
Appendix 1: Interview questions
Do you know what a robot is? What is a robot for you? This question is used as a baseline to determine the expert’s personal definition of a robot.
What is the difference between a robot and a machine in your opinion? The participant describes his or her own views on the topic of robotics and machinery.
What are the properties that you expect a good robot to have? This question aims to gather key terms of important characteristics of robots.
What are your personal doubts or concerns when robots are applied in the AEC industry? This question highlights subjective challenges of robotization in the AEC industry.
What are general doubts or concerns when robots are applied in the AEC industry? This question aims to find common doubts and concerns in the sector of the AEC industry where the expert is working.
What could be done to minimize these concerns? This question leaves space for individual ideas of improvement for robots.
What kind of visual attributes could be important to promote acceptance in (respective target group)? This question can potentially help in evaluating the attributes used in this study. Respective target groups refer to the profession of the interviewee.
Appendix 2: Parameter coding, variable definition and BLR results
Binary logistic regressions (BLR) estimate the relationship between one (or more) explanatory predictor variables and a single, binary outcome variable. BLR estimates regression parameters by accounting for the fact that probabilities are bounded by 0 and 1. BLR uses the maximum likelihood estimation (MLE) to estimate model parameters. MLE is an iterative process that aims at arriving at parameter values that most likely produce the observed sample data: This approach iterates different outcomes until the parameters cannot improve the result any more (Bousterhout 2014). The predicament to apply BLR analysis on a sample requires the independent variables to not be highly correlated (Walther 2020). Correlations in the range of \(0.9<c <1.0\) count as “highly correlated” (Calkins 2005). Regression Coefficient b represents the logarithmic odds change of the dependent variable (perception) when the predictor variable (attribute) is changed. It is mainly used to determine Exp(b). If this variable tends towards 0, this indicates no relation between the dependent variable and the predictor (Crowson 2019). Standard Error estimates the standard deviation from the mean of the used sample to the effective mean, if the sample would be optimally distributed (Ilola 2018; Kenton 2021). df counts the calculations for each predictor variable (attribute) and has no further impact on the analysis. p lists the statistical significance of the respective calculation. \(p>0.05\): results are insignificant and p < 0.05: results are significant (Bhandari 2021; Gallo 2016). Exp(b) expresses the multiplicative change in odds of an increase in the dependent variable (perception) when the predictor variable (attribute) is increased by one unit. If Exp(b) > 1 then an increase in the predictor variable heightens the odds of the dependent variable to increase. Contrarily, if Exp(b) < 1, the odds sink (Crowson 2019). 95% Confidence Interval for Exp(b) gives an understanding of the accuracy of the estimated value of Exp(b). It shows the range in which the effective Exp(b) lies with a confidence of 95% (Crowson 2019) (Tables 12, 13, 14).
Appendix 3: Full table of robot attributes and perceptions
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Walzer, A.N., Kahlert, A., Baumann, M. et al. Beyond googly eyes: stakeholder perceptions of robots in construction. Constr Robot 6, 221–237 (2022). https://doi.org/10.1007/s41693-022-00087-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41693-022-00087-y