
Abstract
This paper describes the dynamic analysis of soil–structure interaction by using the spectral element method (SEM). This numerical method is a powerful numerical technique suited for the dynamic tasks. In this case, numerical methods with highly developed computer technique become very efficient to analyze complex problems. The partial differential equation governing the motion is derived and solved by using SEM. Thus, the corresponding solutions are the eigenvalues of the problem, so natural frequencies are tabulated for the first three modes of vibration. This numerical analysis treats the effect of: (a) the modal analysis with and without the elastic medium, (b) the influence of the interaction between the beam and soil, (c) the influence of the soil properties on the dynamic response, and (d) the influence of the non-classical boundary conditions. The obtained results of these effects are presented and commented.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The beam and the beam-like structures resting on elastic foundations have wide applications in engineering practices, such as railway tracks, highway pavements, and pipelines lying on soil. In this case, numerous studies have been performed to analyze the static deflections, dynamic responses, and dynamic stability of beams on elastic or viscoelastic foundations. So, the computational models of a beam on elastic foundation or classical supports have large applications in various domains of engineering: transportation, marine, pavement, aerospace, mechanical, petroleum, geotechnical and civil engineering [1].
One of the principal problems in structural and geotechnical engineering aims to compute response of structures together with the surrounding soils. Certainly, the analysis of dynamic behavior of SSI is a very complicate task due to the complexities of soil behaviors and dynamic approach. Therefore, numerical models should consider SSI effects in the analysis and design of structures founded on soil medium. The modeling of the interfacial continuum between a beam and a soil is a main factor in the analysis of such problem [2]. This modeling becomes more complicated task for structures whose responses are influenced by the surrounding media.
The dynamic analysis of SSI is convoluted by the soil behavior, interface medium, structure, and dynamic procedure. For this concern, Far [3] has illustrated a comprehensive review on accurate and realist modeling technique and computational methods treating the SSI effects on structures resting on soft soils. The elaborated investigations aimed to study the effect of SSI and the seismic impact on structural response [4,5,6,7].
With the advances in computational field, the numerical finite element method (FEM) has been intensively used to predict the dynamic responses of engineering structures. Really, it is an important tool used to analyze the behavior of structures under static or dynamic loadings. To obtain significant responses using this method, the entire system must be discretized to a large number of finite and infinite elements which complicate the computational task [8]. The FEM is employed as a device to describe the behavior both of the beam and soil medium having various profiles [9, 10].
Besides the FEM, the boundary element method (BEM) is also one of the most powerful alternative numerical methods and among the most appropriate technique for seismic wave propagation in a complex geological media [11,12,13]. Both methods can be formulated either in time or in frequency domains and each one has own advantages and drawbacks. The choice of the numerical method in modeling depends on the properties of the system such as geometry, material properties, type of loading and boundary conditions. Therefore offered technologies, combined models of FEM and BEM are advantageously employed in numerical modeling of the infinite or semi-infinite domains.
On the other side, Doyle [14,15,16], Leung [17], Lee et al. [18: 1–2], Lee [19], Bashir and Ahmad [20] and Penava et al. [21] have contributed to the development of SEM. This numerical method has been extended to study dynamic responses of structures, which provides accurate results compared to the FEM and BEM. Firstly, the concept of SEM was introduced by Narayanan and Beskos [22] in which the dynamic stiffness matrix of the beam element is derived and corresponding solution is obtained by using the fast Fourier transform (FFT). Later, Rizzi and Doyle [23] used the terminology “Spectral Element Method” for the first time combined with FFT based spectral element analysis approach. Adding, the spectral element method finds its wide application in engineering domains. Due to their universal nature, the spectral methods are most commonly used to model the detection and identification of structural damage [24]. Fourier et al. [25] presented an application of the spectral element method to model axisymmetric flows in rapidity domain. Also, to simulate room acoustics, a wave-based numerical scheme is elaborated based on the spectral element method [26].
The formulation of SEM is similar to the conventional FEM but in spectral element formulation, the governing partial differential equation of motion is transferred from the time domain to the frequency domain by using discrete Fourier transform (DFT). In this case, the time variable disappears and the frequency variable appears as the mathematical variable of the problem. Based on obtained results [27,28,29], only one spectral finite element can be used to obtain satisfactory dynamic results. This numerical method reduces considerably the number of conventional finite elements and of the degrees of freedom [14], the time consuming, and the area of storage on the computer memory. Among the objectives of this work, the spectral element method is used to quantify the effects of the soil–structure interaction on free vibrations of beams.
Modeling of the soil–structure interaction
Recently the fixed-base of the structure assumption is rarely used studying the dynamic response of the structure. The compliance of soil foundation induces two distinct effects on the dynamic response of the structure (1) the modification of the free field motion at the base of the structure (kinematic interaction) and (2) the introduction of deformation from dynamic response of the structure into the supporting soil (inertial interaction) that is used in this work. Initial forces induced by the motion of foundation during the earthquake engender the compliant soil to deform affecting the super-structure inertial forces. This deformation propagates away from the structure which causes a decrease of the dynamic attenuation of the super-structure [30]. Adding, the compliance of the soil can be interpreted by a stiffness value that can be combined with damping propriety of the foundation forming a complex impedance function [31].
Mathematical formulation
The dynamic soil–structure interaction problems can be analyzed in time domain or in frequency domain. If the frequency domain is chosen then the structure can be modeled by using the spectral element method while the dynamic stiffness of the soil can be substituted by impedance functions. The discrete equation of the soil–structure system can be formulated in the displacement field with
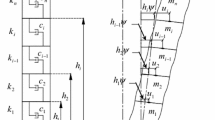
where KB and KS are the dynamic stiffness submatrices of beam and soil (exponents B, I and S stand for beam, interaction, and soil, respectively). \(u_{\text{B}}^{{}}\), \(u_{\text{I}}^{{}}\) and \(u_{\text{S}}^{{}}\) constitute kinematic degrees of freedom of the system and \(F_{\text{B}}^{{}}\), \(F_{\text{I}}^{{}}\) and \(F_{\text{S}}^{{}}\) are the dynamic forces for various components as indicated on Fig. 1.

Modeling of the subsuper-structure
If no external forces are assumed to act on the structure, the displacement vectors \(u_{\text{B}}^{{}}\), \(u_{\text{I}}^{{}}\) can be computed using the first two equations of the relationship (1) that becomes as
For free vibration of the beam, the determinant of the equation should be null.
The eigenvalues of the expression (3) using the spectral element method are described as bellow.
In the general case, a beam elastically restrained at ends and subjected to external load q(x, t), having a length L, cross-section \(\varOmega\), flexural rigidity EI and mass density \(\rho\) (Fig. 2).

Mechanical model of the beam
K and \(R\) are the translational and rotational stiffness of the soil under foundation.
The partial differential equation for transverse vibrations of the Euler–Bernoulli beam can be written as follows:
where \(c^{2} = \frac{\text{EI}}{\rho \varOmega }\) and \(v(x,t)\) is the vertical deflection of point of the beam at the spatial abscissa x and the temporal time t.
For free vibration of the system, the external load should be null and Eq. (4) becomes
The solution of Eq. (5) can be written as follows:
Introducing Eq. (6) into Eq. (4), this leads to:
\(\omega\) is the natural frequency.
Thus, the spatial part of Eq. (7) can be deduced as
The quantity \(\alpha\) that \(\alpha_{{}}^{4} = \left( {\frac{\omega }{c}} \right)_{{}}^{2} = \frac{\rho \varOmega }{EI}\omega_{{}}^{2}\), is denoted the dimensionless natural frequency and \(X(x)\) is the mode shape of the beam. The general solution of Eq. (8) is then
ci are coefficients of the general solution.
The nodal displacement vector \(\left\{ {q_{e}^{{}} } \right\}\) can be deduced by using kinematic conditions.
With the rotation is \(\theta (x) = \frac{\partial X(x,\omega )}{\partial x}\)
Thus, the vector of generalized coefficients can be computed by
Thus to resolve this problem, it is necessary to offer four independently boundary conditions. Based on the general problem (Fig. 2), the vector of forces at the ends of the beam can be established by using boundary conditions of the beam.
at x = 0
at x = L
In matrix form, the forces at the ends of beam (Fig. 1) using Eq. (12) are
In compact form, Eq. (13) becomes
Substituting Eq. (11) into Eq. (14), we obtain
The spectral stiffness matrix for a spectral finite element of classical boundary conditions can be evaluated by
The parameters of the spectral stiffness matrix can be easily deduced by applying the product \(\left[ {F(\omega )} \right]\) by \(\left[ {B(\omega )} \right]_{{}}^{ - 1}\).
Numerical examples
Validation of the approach
Beam without soil foundation
In order to show the accuracy of this procedure, free vibration of cantilever beam without foundation is used [31] in which the solution is obtained by the differential transform method (DTM) (Table 1).
As it has seen from Table 1, this approach provides exact results compared to DTM method and exact solution, respectively.
Cantilever beam on translational spring
In this case, the characteristics of the cantilever beam are of a stainless steel one (Fig. 3). So the mechanical properties and geometrical dimensions are regrouped in Table 2.

Stainless steel beam on translational spring
Again the performance of SEM instead the conventional FEM is shown in Table 3.
To obtain accurate results using FEM, it is necessary meshing the beam into about 200 finite elements leading to the formulation of stiffness and masses matrices of size (400*400). Thus, computing time and space memory of the machine must be necessary in this phase.
Cantilever beam on rotational spring
The same stainless beam on a rotational spring \(K = 10_{{}}^{4} \,{\text{N}}/{\text{m}}/{\text{rad}}\) is used (Fig. 4)

Stainless steel beam on rotational spring
Table 4 shows the first three modes of vibrations using FEM and SEM. Also, about 200 finite elements are required to obtain correct results and therefore one spectral element suffuses to obtain suitable resultants.
The convergence of numerical results is validated using many numerical programs of SEM and FEM developed for this concern. The first category is focused on the use of the finite element program to calculate natural frequencies, mode shapes, and the second one is devoted to SEM to compute dimensionless frequency coefficient and to deduce natural frequencies.
Analysis using this approach
Concrete beam on elastic foundation
Then, a concrete cantilever beam is used; the concrete is of the class C30. The beam is characterized by geometrical and mechanical properties (Table 5). The beam is assumed on an equivalent Winkler spring substituting the soil stiffness (Fig. 5).

Beam on elastic springs
To prove the robustness of SEM, only one spectral finite element is suffused to obtain the first three frequencies while the finite element analysis requires about 150 finite elements. Translational and rotational of the first three modes of vibration are depicted in Fig. 6 (Table 6).

First three modes of vibrations
It can be noted that major deflections are obtained by the first mode of vibration; therefore, major slope is resulted due to the third mode of vibration. More, the third mode of vibration engenders maximum deflections and slopes at the establishment of equivalent stiffness.
Effect of the beam length
Three lengths of the beam are selected to study their influence on the free vibration of Euler–Bernoulli beam (Fig. 7).

Beam studied with variable length
Table 7 illustrates the first three modes of vibration obtained using SEM and FEM. Based on above results, the beam is always meshing with 150 finite elements. The length of the beam has an effect on the dynamic response of the beam that’s when the length is important, frequencies of vibration decrease with a considerable way. In this case, varying of the length of three times the frequency decreases with seven time. More, the natural frequencies of the beam decrease with increasing length.
More from the beam theory, beams having short length vibrate with different manner than those of moderate and long lengths. Short lengths engender maximum deflections and slopes along beams due to neglecting of shear deformations (Figs. 8, 9). Both in translational and rotational vibrations, the length of the beam influences on the amplitude of the vibrations; beams with short length vibrate with great amplitudes (Figs. 8, 9).

Effect of beam length on translational vibrations

Effect of beam length on rotational vibrations
Effect of the properties of soil
The effect of mechanical properties of the soil is among objective of this study. For this reason, three types of soil are selected based on Winkler springs, which vary from loose, moderate to firm soil, which their stiffness values change as \(k_{0}^{{}} = (0.5,\,5,\,50)\,{\kern 1pt} 10_{{}}^{4} \,{\text{kN}}/{\text{m}}_{{}}^{3}\), respectively. Thus, the results of the first three natural frequencies of this system with varied soil parameters are listed in Table 8. This table shows eventually that frequencies increase with the soil property increases.
It is seen from Fig. 10 that when feeble properties of soil are used, rotational vibrations of the beam are opposite to those with better properties. Figure 10 shows the first three mode shapes of the cantilever beam considering into account the properties of the soil. It is remarkable that the vibration shape is affected by the properties of the soil on translational and rotational vibrations of the beam. For better characteristics of the soil, the beam vibrates with the same shape in the rotational case.

Effect of soil properties on the beam vibration
Conclusion
In this paper, the spectral element method is used to analyze the vibration of beams on non-classical supported boundary conditions. The conclusions that can be tired from this analysis are:
The validation of this approach compared to the differential transform method and analytical method is verified using cantilever beam with and without Winkler springs.
The convergence of SEM is quite fast compared to FEM; one spectral finite element is suffused to reach accurate results.
Maximum deflections are observed with the 1st mode while similar slopes are obtained with the third mode of vibration.
Natural frequencies of the beam decrease with the increasing of the length and the short beams that vibrate with high amplitudes.
The properties of the soil influence considerably on mode shape of vibrations, on the deflections and slopes of beams.
References
Barber JR (2010) Intermediate mechanics of materials, vol 175. Springer, Berlin
Avramidis IE, Morfidis K (2006) Bending of beams on three-parameter elastic foundation. Int J Solids Struct 43(2):357–375
Far H (2017) Advanced computation methods for soil–structure interaction analysis of structures resting on soft soils. Int J Geotech Eng 11(1):1–8
Behnamfar F, Fathollahi A (2016) Conversion factors for design spectral accelerations including soil–structure interaction. Bull Earthq Eng 14:2731–2755
Feng D, Feng MQ (2018) Computer vision for SHM of civil infrastructure: from dynamic response measurement to damage detection—a review. Eng Struct 156:105–117
Khosravikia F, Mahsuli M, Ghannad MA (2018) The effect of soil–structure interaction on the seismic risk to buildings. Bull Earthq Eng 16(9):3653–3673
Mirzaie F, Mahsuli M, Ghannad MA (2017) Probabilistic analysis of soil–structure interaction effects on the seismic performance of structures. Earthq Eng Struct Dyn 46(4):641–660
Wang YH, Tham LH, Cheung YK (2005) Beams and plates on elastic foundations: a review. Prog Struct Eng Mater 7(4):174–182
Baraldi D, Minghini F, Tezzon E, Tullini N (2018) Nonlinear analysis of RC box culverts resting on a linear elastic soil. Int J Struct Glass Adv Mater Res 2:30–45
Boudaa S, Khalfallah S, Billota E (2019) Static interaction analysis between beam and layered soil using a two-parameter elastic foundation. Int J Adv Struct Eng 11(1):21–30
Becker AA (1992) The boundary element method in engineering. McGraw-Hill, Berkshire
Genes MC, Kocak S (2005) Dynamic soil–structure interaction analysis of layered unbounded media via a coupled finite element/boundary element/scaled boundary finite element model. Int J Numer Methods Eng 62:798–823
Yaseri A, Bazyar MH, Hataf N (2014) 3D coupled scaled boundary finite-element/finite-element analysis of ground vibrations induced by underground train movement. Comput Geotech 60:1–8
Doyle JF, Farris TN (1990) A spectrally formulated finite element for flexural wave propagation in beams. Int J Anal Exp Modal Anal 5:99–107
Doyle JF (1988) A spectrally formulated finite element for longitudinal wave propagation. Int J Anal Exp Modal Anal 3:1–5
Doyle JF (1986) Application of the fast-Fourier transform to wave propagation problems. Int J Anal Exp Modal Anal 1:18–28
Leung AYT (2000) Dynamic stiffness for structures with distributed deterministic or random loads. J Sound Vib 242:377–395
Lee U, Kim J, Leung AYT (2000) The spectral element method in structural dynamics. Shock Vib Dig 32(6):451–465
Lee U (2009) Spectral element method in structural dynamics. Wiley, Hoboken
Bashir MN, Ahmad MO (2016) Development of numerical technique by Galerkin approach of spectral element method for hybrid beam. AIP Adv 6(11):115107
Penava D, Kraus I, Petronijevic M, Schmid H (2018) Dynamic soil–structure analysis of tower-like structures using spectral elements. Tech Gaz 25(3):738–747
Narayanan GV, Beskos DE (1978) Use of dynamic influence coefficients in forced vibration problems with the aid of fast Fourier transform. Comput Struct 9(2):145–150
Rizzi SA, Doyle FJ (1992) A spectral element approach to wave motion in layered solids. J Vib Acoust 114(4):569–577
Palacz M (2018) Spectral methods for modeling of wave propagation in structures in terms of damage detection—a review. Appl Sci J 8(7):1124–1149
Fourier A, Bunge HP, Hollerbach R, Vilotte JP (2004) Aplication of the spectral-element method to the axisymmetric Navier–Stokes equation. Geophys J Int 156:682–700
Pind F, Mejling MS, Engsig-Karup AP, Jeong CG, Strømann-Andersen J (2018) Room acoustic simulations using high-order spectral element methods. In: Euronoise 2018 conference, pp 2085–2092
Hamioud S, Khalfallah S (2018) Free-vibration of Timoshenko Beam using the spectral element method. Int J Eng Model 31(1–2):61–76
Hamioud S, Khalfallah S (2017) Dynamic analysis of rods using the spectral element method (in French). Alger Equip J 57:49–55
Hamioud S, Khalfallah S (2016) Free-vibration of Bernoulli–Euler Beam by the spectral element method. Tech J 10(3–4):106–112
De Barros FCP, Luco JE (1995) Identification of foundation impedance functions and soil properties from vibration tests of the Hualien containment model. J Soil Dyn Earthq Eng 14:229–248
Gazetas G, Mylonakis G (2003) Soil–structure interaction effects on elastic and inealstic structures. In: 4th international conference on recent advances in geotechnical earthquake engineering and soil dynamics, San Diego, California
Kacar A, Tan HT, Kaya MO (2001) Free vibration analysis of beams on variable elastic foundation by using the differential transform method. Math Comput Appl 16(3):773–783
Rao SS (2003) Mechanical vibrations, 4th edn. Pearson Prentice Hall, Pearson
Jafari M, Djojodihardjo H, Arifin AK (2014) Vibration analysis of a cantilevered beam with spring loading at the tip as a generic elastic structure. Appl Mech Mater 629:407–413
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Boudaa, S., Khalfallah, S. & Hamioud, S. Dynamic analysis of soil structure interaction by the spectral element method. Innov. Infrastruct. Solut. 4, 40 (2019). https://doi.org/10.1007/s41062-019-0227-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s41062-019-0227-y