
Abstract
Design of earth retaining wall is an important problem in geotechnical engineering. A retaining wall may fail in sliding or rotation. In the present study, rotational mode of failure is considered. A new approach to compute the rotational displacement of gravity retaining wall under seismic condition is proposed. Seismic forces are computed using pseudo-dynamic method. Dry backfill soil is considered. The present solution is for horizontal ground surface. In the computation of rotational displacement, the location of rotating wall and shift in the point of application of all the associated forces after each time step is included which was ignored in earlier studies. From the present analysis, it is found that the rotational displacement depends on the characteristics of the input motion. A non-dimensional term is used to quantify the effect of input motion on the rotational displacement. Shear strength properties of the backfill soil and geometry of the wall plays very crucial role in computation of rotational displacement.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Sliding and rotational failure are one of the two major failure modes of rigid gravity retaining wall. Safe weight of a retaining wall is obtained separately for sliding at the base and rotation about its toe. The design weight is the highest among these two. Majority of the practicing engineers use simple limit equilibrium method for analysis and design. If the driving force/moment is greater than the resisting force/moment, the section of the retaining wall becomes unsafe. Gravity retaining structures are heavy in section because it resists the thrust from the retained fill using its self-weight. And if we consider the earthquake forces, the design section of these walls become huge. So, if we can reduce the design section of this gravity retaining wall, it will be a way forward towards sustainability. A more realistic approach is to allow the wall to slide or rotate satisfying its serviceability criteria under seismic condition. As we all are aware that a very small quantity of displacement is sufficient to trigger active failure, a very strict serviceability criteria must be adopted in the design guideline.
Basha and Babu [2] computed the sliding displacement of bridge abutment under passive condition using pseudo-dynamic method. Relative acceleration of the failure wedge was integrated to compute the sliding displacement. Huang et al. [7] conducted shake table experiments on rigid retaining walls. Experimental observations were compared with the theoretical computation using Newmark’s method. Conti et al. [6] proposed a theory for sliding displacement. A corrective factor was suggested for the horizontal relative acceleration of the wall and that factor is related to the properties of backfill soil and wall material.
Zeng and Steedman [10] proposed rotating block method for computation of rotational displacement of gravity retaining wall under seismic condition. Horizontal seismic inertia force was assumed to be pseudo-static in nature. Effect of vertical seismic inertia force was ignored. It is well known, that a pseudo-static analysis does not consider the effects of time, frequency and dynamic properties of the backfill material. Choudhury and Nimbalkar [4, 5] computed the rotational displacement of gravity retaining wall using rotating block method and pseudo-dynamic seismic inertia forces for both passive and active earth pressure conditions. Basha and Babu [3] used a non-linear failure surface in the computation of rotational displacement for passive condition. Pain et al. [9] proposed to update the location of the rotating wall and its influence on the directions of external forces during each time increment of the calculation of rotational displacement.
First the expression of rotational acceleration proposed by Choudhury and Nimbalkar [5] are reviewed and rectified, and then the rotational displacement of gravity retaining wall is computed for the active case. An improvement over the rotating block method is proposed.
Methodology
Seismic inertia forces
Pseudo-dynamic method is extensively used in the solution of earth pressure problem under seismic condition. Description of pseudo-dynamic method is not given in this paper to avoid similarity. The expression of acceleration at any instance was proposed by Choudhury and Nimbalkar [5]. The expression of acceleration distribution for the backfill soil and the wall are as follows:
Backfill soil is assumed to be isotropic, homogeneous and dry. Present solution is for rigid retaining structure. The basic soil properties: friction angle and unit weight are assumed to be constant during shaking. Shear modulus (G) is constant within the backfill. Details of the failure surface are shown in Fig. 1. ABEF is a gravity retaining wall. Angle of inclination is θ. H is the vertical height of the wall.

Details of forces acting on the soil wedge and the wall
α f is the inclination angle of the assumed failure surface with the horizontal. Mass of a thin element dz of the active wedge ABD at depth z is
Q hs(t) and Q vs(t) are the seismic inertia forces in the active soil wedge ABD
Total seismic active earth pressure, P ae(t) may be computed by solving the equilibrium equation of the failure wedge ABD,
where \(W_{\text{s}} = 0.5\gamma H^{2} (\tan \theta + \cot \alpha_{\text{f}} )\).
However, the point of application of P ae(t) has to be determined. The expression of P ae(t) is in terms of the height of the wall, H. First the generic expressions of theses integrals are obtained in terms of variable z instead of H. And then the expression of P ae(t) is differentiated with respect to z. This will give us the distribution of P ae(t) with respect to depth. The total moment of the seismic active earth pressure with reference to the point E may be calculated as:
Wall is also subjected to harmonic base shaking. The mass of a thin element dz of the wall AFEB at depth z is
Q hw(t) and Q vw(t) are the seismic inertia forces in the wall AFEB
Critical acceleration coefficient for rotation
FSRD is a dynamic factor of safety against rotational mode of failure.
The critical seismic acceleration coefficients at the base are evaluated using Eq. (13). A trial and error procedure is adopted. And in that process a seismic acceleration coefficient value is assumed to compute the value of FSRD. The minimum value of seismic acceleration coefficient for which FSRD becomes 1.0 is categorized as critical seismic acceleration coefficient.
Determination of rotational displacement
A wall starts rotating when the ground acceleration exceeds a critical base accelerations for which the wall is at the verge of rotation. Passive earth pressure of the backfill soil resists the wall movement towards the backfill. Rigid body movement of the wall is assumed to obtain the rotational displacements. Similar assumptions were made by Zeng and Steedman [10] and Choudhury and Nimbalkar [5] to obtain the rotational displacements using pseudo-static and pseudo-dynamic method, respectively.
Rotational acceleration and error of given equation
Choudhury and Nimbalkar [5] gave the rotational acceleration of the wall as
The term \(\left( {\frac{{W_{\text{w}} }}{g}} \right)a_{\text{g}} y_{\text{c}}\) in the Eq. (14) is the moment of the pseudo-static wall inertia force about the toe of the wall same as considered by Zeng and Steedman [10], but Choudhury and Nimbalkar [5] has also considered the moment of the pseudo-dynamic wall inertia force about the toe of the wall, which is \(Q_{\text{hw}} y_{\text{c}}\). The effect of wall inertia is considered twice in the expression of rotational acceleration.
Modification of equation for rotational acceleration
After recalculation, the modified equations are proposed. Zeng and Steedman [10], Choudhury and Nimbalkar [4, 5], and Basha and Babu [3] assumed the rotation displacement of the wall to be very small and ignored the shift in the point of application of all the associated forces. But the amount of rotational displacement increase with increase in the total duration for which the ground accelerations are greater than the critical seismic accelerations at the base. So it is very essential to update the location of the wall after each time increment in the calculation of rotational displacement. From Fig. 2, horizontal and vertical acceleration at the centroid are:

Forces and accelerations on gravity wall with rotation during base shaking
By applying D’Alembert’s principle of rotational motion and taking the moment of all the forces about the point E and rearranging the terms one may obtain the rotational acceleration α as:
The velocity of rotation may be derived as:
The rotation displacement (ψ) may be obtained as:
A procedure is developed to update the shift in the point of application of all the associated forces after each time step. Total input motion is divided into n number of equal segments each of ∆t duration. When the ground acceleration just exceed the critical base acceleration, the wall will start rotating, and at that time step seismic active thrust is P ae(t) for the wall inclination θ, the point of application of the seismic active earth pressure is h d(t), \(\eta = \eta_{0}\) and ψ = 0. Angular acceleration α and angular velocity β may be determined from the Eqs. (16) and (17a, 17b). Calculate the rotational displacement ψ from the Eq. (18). For the next time step, i.e., t + ∆t, update the wall inclination to θ + ψ, solve for the seismic active earth thrust P ae(t + Δt), h d(t + Δt) may be determined using Eq. (9), update \(\eta\) to \(\eta_{0} + \psi\). Obtain α, β and ψ. This procedure is repeated until the expression in Eq. (17a) is satisfied.
Results and discussion
A computer program is written with the assumption of Zeng and Steedman [10] and seismic forces are considered to be pseudo-static in nature. Figure 3 shows the validation of the MATLAB program with the results reported by Zeng and Steedman [10]. All the input data are kept exactly same as given in Example 1 of Zeng and Steedman [10]. The purpose of Fig. 3 is to demonstrate the accuracy of the developed program. And it is worth mentioning that the developed program matches well with the results of Zeng and Steedman [10]. After this validation, pseudo-static seismic forces are replaced by pseudo-dynamic seismic forces mentioned in the Eqs. (6), (7), (11) and (12) and the proposed procedure to update the shift in the point of application of all the associated forces after each time step is implemented in the MATLAB program.

Validation of the developed MATLAB program
Following input parameters are considered b w/H = 0.2 and 0.3; ϕ = 20°, 30° and 40°; δ/ϕ = 0.0, 0.5 and 1.0; θ = 0, 3, 5 and 7°; duration of shaking (t s) = 1–5 s; f aw = 1.0; T = 0.33 s; γ soil = 17 kN/m3; γ wall = 24 kN/m3; V p/V s = 1.87 and V pw/V sw = 1.56.
Rotational displacement (ψ) decrease with the increase in the soil friction angle value (ϕ) (refer Fig. 4). ψ decreases by about 83 and 81 % when ϕ increases from 20° to 30° and 30° to 40°, respectively, for k h = 0.20. Rotational displacement is decreasing due to the reduction in the seismic active earth pressure. Rotational displacement (ψ) decrease with the increase in wall friction angle value (δ) (refer Fig. 5). ψ decreases by about 54 and 73 % when δ increases from 0 to 0.5ϕ and 0.5ϕ to ϕ for k h = 0.30.

Influence of soil friction angle on rotational displacement

Influence of wall friction angle on rotational displacement
Wall inclination angle (θ) also has significant influence on the rotational displacement (ψ) (refer Fig. 6). When θ increases from 0° to 3° and 3° to 5°, ψ decreases by about 81 and 79 %, respectively, for k h = 0.30. But the wall stops rotation when θ increases from 5° to 7°. So unlike the previous cases (for soil friction angle and wall friction angle), where only the seismic active earth pressure plays the key role, here the geometry of the wall plays a pivotal role in the rotational displacement. For higher values of θ, weight of the wall is more so the extra restoring moment is reducing the rotational displacement. Rate of increase in the rotational displacement is observed to be more for lower values of wall inclination angle.

Influence of wall inclination angle on rotational displacement
Vertical seismic acceleration reduces the total resisting moment which ultimately leads to a higher value of rotational displacement for the same amount of horizontal seismic inertia force. Rotational displacement decreases by about 30 and 26 % when k v increases from 0 to 0.5 k h and 0.5 k h to k h, respectively, for k h = 0.30 (refer Fig. 7).

Influence of vertical seismic acceleration on rotational displacement
In the present study, finite values of seismic wave velocities are considered for both soil and wall material. Materials used for the construction of rigid retaining walls generally have high values of seismic wave velocities because of which phase change and amplification of input acceleration are not generally encountered in the wall. Amplification of acceleration is commonly encountered in the soil deposit. Present method allows us to explore the influence of amplification of acceleration through a very simple model. In that model a linear variation of acceleration is considered and the acceleration is assumed to be amplified towards the ground surface. The amount of amplification needs to be assumed and it is done with the help of an amplification factor value. Rotational displacement increases as the amplification factor increases (refer Fig. 8). Seismic active earth pressure is more for higher amplification factor value. ψ increases by approximately 42 % when amplification factor is increased from 1.0 to 1.6 for k h = 0.30.

Influence of amplification of acceleration in the backfill soil on rotational displacement
The amount of rotational displacement largely depends on the duration of input motion (t s). For the input parameters mentioned in the Fig. 9, it is seen that for a 5-m-high retaining wall when t s increases from 3 to 5 s, the rotational displacement increases by about 99 %.

Comparison of rotational displacement for ϕ = 40°, δ = 0.5ϕ, θ = 0°, b w/H = 0.3, k h = 0.3, k v = 0, f a = f aw = 1.0, T = 0.33 s, V s = 200 m/s, V p = 374 m/s, V sw = 2500 m/s, V pw = 3900 m/s γ soil = 17 kN/m3, and γ wall = 24 kN/m3
Referring to Fig. 9, a typical comparison is made between the rotational displacement computed using the rotating block method and the proposed method for \(\phi = 40^\circ\), \(\delta = \phi /2\), θ = 0°, b w/H = 0.3, k h = 0.3, k v = 0, f a = f aw = 1.0, T = 0.33 s, V s = 200 m/s, V p = 374 m/s, V sw = 2500 m/s, V pw = 3900 m/s γ soil = 17 kN/m3, and γ wall = 24 kN/m3. Three different retaining walls with height, H = 1, 5 and 10 m are considered keeping rest of the input parameters same. Intentionally the amplification factor values are kept equal to 1.0 to understand the effect of phase difference of acceleration and also the consequence of the assumption of Zeng and Steedman [10]. Figure 9 clearly shows the importance of the proposed method when the walls are subjected to longer duration of shaking. The values of rotational displacement computed using the proposed method and the rotating block method are comparable when ψ < 1°.
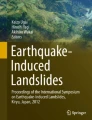
Rotational displacement computed using the proposed methodology is 34 % higher than that obtained using rotating block method for 1-m-high retaining wall subjected to 1 s of ground shaking. For 1 m height retaining wall, horizontal seismic inertia force in soil and the wall are in phase, i.e., they are acting simultaneously. Figure 10 shows the variation of these two seismic inertia forces with time and it is clear that there is no time lag or phase difference between these two seismic inertia forces. When the wall rotation reaches a critical value after which the point of application of gravitational acceleration crosses the toe of the wall, the resisting moment becomes a part of driving moment and the wall topples about the toe. But rotating block method does not consider this phenomenon, because the method does not consider the change in location of the rotating wall. For 1-m-high retaining wall and the data mentioned in the Fig. 9, if the duration of input motion is greater than 1.966 s the wall will fail in rotation about its toe according to the proposed methodology.

Variation of seismic inertia forces in soil and wall for 1-m-high retaining wall having the same input parameters mentioned in Fig. 9
Rotational displacement computed using the proposed methodology is only 3 % higher than that obtained using rotating block method for the 5-m-high retaining wall subjected to 1 s of ground shaking. But the difference in rotation displacement is as high as 43 % for 5 s duration of shaking. Present results are higher than the results of rotating block method for the 5-m-high retaining wall. Whereas rotational displacement computed using the proposed methodology is comparable with the results of rotating block method for 10 m height of the wall for even 5 s duration of shaking. Figures 11 and 12 show the variation of horizontal seismic inertia force in soil and the wall for wall height 5 and 10 m, respectively, and a clear phase difference may be observed. The phase difference is more for 10 m height of retaining wall. This is the difference between the pseudo-static and pseudo-dynamic approach. Pseudo-dynamic approach demonstrates that both these seismic inertia forces may or may not act simultaneously.

Variation of seismic inertia forces in soil and wall for 5-m-high retaining wall having the same input parameters mentioned in Fig. 9

Variation of seismic inertia forces in soil and wall for 10-m-high retaining wall having the same input parameters mentioned in Fig. 9
This time lag or phase difference may be understood with the help of a non-dimensional term H/TV s. Phase difference is more for higher values of H/TV s. In other words, for the same period of ground shaking (T) and same velocity of shear wave (V s), phase difference will be marginal for shorter walls and for comparatively higher walls the phase difference have significant influence on rotational displacement. If we look into the present set of data, the value of H/TV s is 0.03, 0.15 and 0.30 for wall height of 1, 5 and 10 m, respectively. And as discussed the phase difference is significant for 10 m height of retaining wall (refer Fig. 12).
A pseudo-static-based approach does not account this phase difference phenomenon. Centrifuge experiments conducted by Nakamura [8] also highlighted that wall inertia and dynamic earth pressure do not occur simultaneously. Athanasopoulos-Zekkos et al. [1] numerically validated the experimental results reported by Nakamura [8]. Numerical simulations were carried out in commercially available Finite Element software. Reduction in the value of dynamic active thrust, acting at the instant peak wall inertia was also reported by Athanasopoulos-Zekkos et al. [1]. Finding of the present study is in line with the conclusion of Nakamura [8] and Athanasopoulos-Zekkos et al. [1].
The assumption of Zeng and Steedman [10] is found to be valid only for very small values of rotational displacement (ψ < 1°). It is also observed that, the rotational displacement obtained using both the methodologies reduce with an increase in the wall height. These reductions in the value of rotational displacement may be attributed to the increase in the value of the polar moment of inertia.
Conclusions
A solution is proposed for the calculation of rotational displacements of gravity retaining walls. Importance of change in location of the rotating wall and the shift in the point of application of seismic active earth pressure after each time step is highlighted. From the analysis, it is clear that the rotational displacement not only depends on the properties of the backfill, it depends on the characteristics of the input motion, wall geometry and the properties of the wall material. In the present analysis, a time lag or phase difference is observed between the seismic inertia force in the soil and seismic inertia force in the wall. And this observation is in line with the earlier experimental and numerical studies. Pseudo-static method considers that these two seismic forces act simultaneously which is certainly not the case. Design of retaining wall against rotational failure considering pseudo-static seismic forces may be over conservative for certain set of input parameters. Present method may be a good alternative to pseudo-static approach in terms of sustainability. Soil friction angle, wall friction angle and wall inclination angle have significant influence on the rotational displacement. Using the present methodology one can optimize the design section, i.e., width of the wall, inclination of the wall, backfill material, etc. The findings of the present study are helpful in designing retaining wall which is seismically stable.
Abbreviations
- a hs (z,t), a vs (z,t):
-
Horizontal and vertical acceleration in backfill soil at depth z and time t
- a hw (z,t), a vw (z,t):
-
Horizontal and vertical acceleration in wall at depth z and time t
- b :
-
b w/H
- b w :
-
Top width of the retaining wall
- FSRD :
-
Dynamic factor of safety against rotation failure
- f a :
-
Amplification factor for backfill soil
- f aw :
-
Amplification factor for wall material
- g :
-
Acceleration due to gravity
- G :
-
Shear modulus
- H :
-
Height of retaining wall
- I c :
-
Polar moment of inertia of the wall about centroid
- k h, k v :
-
Horizontal and vertical seismic acceleration coefficient at the base
- P ae(t):
-
Seismic active thrust
- Q hs(t), Q hw(t):
-
Horizontal inertia forces in the active wedge and wall due to seismic acceleration
- r c :
-
Radial distance between centroid and rotation center E
- t :
-
Time
- t s :
-
Duration of input motion
- T :
-
Period of lateral shaking
- V s, V sw :
-
Shear wave velocity in the backfill and wall
- V p, V pw :
-
Primary wave velocity in the backfill and wall
- W w :
-
Weight of the wall
- W s :
-
Weight of active soil wedge
- z :
-
Depth from the top of the backfill or wall
- α :
-
Rotational acceleration
- α f :
-
Angle of inclination of failure plane with horizontal
- β :
-
Rotational velocity
- \(\gamma_{\text{soil}}\), \(\gamma_{\text{wall}}\) :
-
Unit weight of the backfill and wall material
- δ :
-
Wall friction angle
- ϕ :
-
Soil friction angle
- θ :
-
Wall inclination angle
- ω :
-
Angular frequency of motion = 2π/T
- η :
-
Angle of inclination of radial distance between centroid and rotation center E with horizontal
- ψ :
-
Rotational displacement
References
Athanasopoulos-Zekkos A, Vlachakis VS, Athanasopoulos GA (2013) Phasing issues in the seismic response of yielding, gravity-type earth retaining walls—overview and results from a FEM study. Soil Dyn Earthq Eng 55:59–70
Basha BM, Babu GL (2009) Computation of sliding displacements of bridge abutments by pseudo-dynamic method. Soil Dyn Earthq Eng 29(1):103–120
Basha BM, Babu GL (2010) Seismic rotational displacements of gravity walls by pseudodynamic method with curved rupture surface. Int J Geomech 10(3):93–105
Choudhury D, Nimbalkar S (2007) Seismic rotational displacement of gravity walls by pseudo-dynamic method: passive case. Soil Dyn Earthq Eng 27(3):242–249
Choudhury D, Nimbalkar S (2008) Seismic rotational displacement of gravity walls by pseudo dynamic method. Int J Geomech 8(3):169–175
Conti R, Viggiani GMB, Cavallo S (2013) A two-rigid block model for sliding gravity retaining walls. Soil Dyn Earthq Eng 55:33–43
Huang CC, Wu SH, Wu HJ (2009) Seismic displacement criterion for soil retaining walls based on soil shear strength mobilization. J Geotech Geoenviron Eng 135(1):74–83
Nakamura S (2006) Reexamination of Mononobe-Okabe theory of gravity retaining walls using centrifuge model tests. Soils Found 46(2):135–146
Pain A, Choudhury D, Bhattacharyya SK (2016) Computation of rotational displacements of gravity retaining walls by pseudo-dynamic method. In: Proceedings of the 4th GeoChina 2016 international conference: sustainable civil infrastructures: innovative technologies for severe weathers and climate changes, July 25–27, Shandong, China, 2016 (accepted paper ID 266)
Zeng X, Steedman RS (2000) Rotating block method for seismic displacement of gravity walls. J Geotech Geoenviron Eng 126(8):709–717
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Pain, A., Choudhury, D. & Bhattacharyya, S.K. Seismic rotational displacement of retaining walls: a pseudo-dynamic approach. Innov. Infrastruct. Solut. 1, 22 (2016). https://doi.org/10.1007/s41062-016-0023-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s41062-016-0023-x