
Abstract
The SARS-CoV2 virus has spread world wide rapidly. Although a small fraction of the infected people need special care, this number is much greater than what the healthcare systems support. In the most severe cases, mechanical ventilation is crucial for patient recovery, but not available in the needed quantity. In Brazil, mechanical ventilators are mainly imported and at a high cost, increased by the pandemic and the economic crisis, and with high delivery delay, aggravated by the risk of infection of incoming ships, airplanes and external goods. In this sense, an emergency mechanical ventilator developed and produced in the country could save many lives due to the lack of mechanical ventilators. To address this issue, this paper describes the effort to develop such a device.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Brazilian public health authorities are consistent in pointing out that the major risk of the Covid-19 pandemic is the public health system saturation. In such a scenario it will be impossible to properly treat patients in severe conditions because of the lack of ICUs and, in particular, mechanical ventilators (Moreira 2020; Ranney et al. 2020; Truog et al. 2020). On March 20th 2020, three of us (M. S. G. Tsuzuki, O. Horikawa and T. C. Martins) decided to start the design and development of an emergency mechanical ventilator. The first prototype was made at our homes and we submitted the proposal to the Code Life Ventilator Challenge launched by the Montreal General Hospital Foundation and the Research Institute of the McGill University Health CentreFootnote 1. On April 9th 2020, we received a grant from Amigos da POLI. With this financial support, we invited some post doctors and Phd students to participate in the project. An engineer team from an enterprise, Atlas-Schindler, joined the project on May 15th 2020. We have already built three prototypes and we are currently working on the development of the fourth one. We here describe the achievements until the third prototype and all the knowledge we are transferring to the fourth prototype.
This project aims to develop a mechanical ventilation system that can be assembled and distributed rapidly throughout the country. The project endorses rapid manufacturing and adoption of widely available devices and parts. The design and development was based on the Brazilian Regulatory Agency (ANVISA) guidelines for Rapidly Manufactured Ventilador System Based on Bag Valve Masks (BVM) (RDC 386, from May 15th 2020 (ANVISA 2020)). Few healthcare regulation agencies published similar guidelines. The United Kingdom Medicines & Healthcare Regulatory Agency (UK-MHRA) published guidelines for Rapidly Manufactured Ventilator Systems (RMVS) (UK-MHRA 2020). The Spanish Agency of Medicines and Medical Devices (AEMPS) and the United States Food and Drug Administration (US FDA), among others, have also issued similar guidelines.
Vent19 automates the usage of BVM. Several other emergency ventilators use the same principle: E-Vent from MIT (Kwon et al. 2020; MIT 2020), OxVent from the University of Oxford and King’s College London (Oxford 2020), ApoloBVM from Rice University (Rice-University 2020), ATMO-vent from the University of Technology of Luleä (Mathanlal et al. 2020), Inspire from Escola Politécnica of the Universidade de São Paulo (EPUSP) (EPUSP 2020), and others. EPUSP proposed two emergency mechanical ventilators based on BVM: Vent19 and Inspire. In addition to these BVM based mechanical ventilators, other types of air pressurization techniques were explored in the world (Majid et al. 2020; Zhang et al. 2020; Khan et al. 2020; Castro-Camus et al. 2020; Vasan et al. 2020; Hidayat et al. 2020; Zuckerberg et al. 2020; Fang et al. 2020). Some proposed emergency ventilator only requires compressed oxygen (King et al. 2020). A review on proposed emergency ventilators has been published (Pearce 2020).
Vent19 was designed to be used as non-invasive positive pressure with facial masks and as an invasive ventilator with intubation using endotracheal tube. Its requirements were: 1. configurable inspiratory pressure; 2. configurable respiratory frequency; 3. configurable inspiratory/expiratory time ratio; 4. tidal volume measurement; 5. autonomy of 180 minutes in case of lack of power; 6. simple and intuitive interface; 7. modular architecture; 8. bi-volt operation (127V and 220V).
The paper has the following structure. Section 2 describes Vent19 architecture with its main components. Section 3 describes the electro-mechanical design, based on the use of a DC brushed electric motor and the transmission of the mechanical power to the mechanism through a pulley and belt set. Section 4 describes the control system, which uses a PID controller with a Kalman filter to estimate the position and velocity of the pulley. Section 5 presents and describes the pneumatic circuit and the oxygen mixture. We designed a flow meter using the venturi principle. Section 6 describes some security items and the supervisory system. Section 7 describes the design of the fourth prototype which has been made in cooperation with the Atlas-Schindler group. Section 8 has the conclusions and suggestions for future work.
2 Architecture

Vent19 architecture. It is controlled by a microprocessor (Arduino Mega). Two versions were designed: 1. The Arduino outputs to an LCD display 4x20; and 2. The Arduino communicates through a serial channel with Raspberry Pi and Raspberry Pi outputs to a graphical display
Vent19 is a BVM-based mechanical ventilator designed using low-cost, readily available components and materials. Even flow sensors can be easily machined in a lathe or fabricated by a 3D printing process. Figure 1 shows the proposed architecture. Arduino is the main component and receives inputs from two flow sensors, one pressure sensor and three optical sensors. One flow sensor is placed in the air inlet and it is used to control the air and O\(_2\) mixture. The air exit is monitored by a second flow sensor and by a pressure sensor. These sensors are used to implement the control mode by volume and the control mode by pressure. Three optical sensors are used to monitor the speed and position of a pulley that moves a swinging arm, which in turn, compresses the BVM. Signals generated here are used to control the DC brushed electric motor.
Besides the DC motor, the Arduino also commands the opening and closing of three solenoid valves. Two solenoid valves are located in the air entrance, performing the air and O\(_2\) mixture. The third solenoid valve is an electrical version of a PEEP valve. PEEP is a valve necessary in mechanical ventilation systems and assures that the pressure in the patient lung never drops below the so called PEEP pressure of 4 to 5 centimeters of water. In conventional PEEP valves, the PEEP pressure is adjusted by regulating the force exerted by a spring on the seal that obstructs the air passage. The DC brushed electric motor is controlled through a driver using PWM.
We have two versions of the Vent19 mechanical ventilator: 1. The Arduino outputs to a LCD display 4x20; and, 2. The Arduino communicates with a Raspberry Pi which outputs to a graphical display. Figure 2 shows the second prototype with LCD display 4x20. In the following sections, the modules of the Vent19 are described.
3 The Electromechanical Module
The objective of the proposed mechanical ventilator is not to replicate commercial models because, in addition to the high cost of the components, there is a logistic difficulty, hospital structure and personnel training to install and use the device. As previously explained, the objective of this project is to use low-cost, readily available components and materials and be independent of the hospital structure to operate. The second prototype is illustrated in Fig. 2 and its CAD model in an exploded view is shown in Fig. 3.

Second prototype of the Vent19 (the third version is under development)

Exploded view of the Vent19 second prototype
The pressurized air supply is achieved by a lever mechanism that compresses the BVM. The mechanism is powered by a DC brushed electric motor (12 V and 30 W) instead of a stepper motor, adopted in many other projects. The DC brushed electric motor is controlled in both directions by an H-bridge driver compatible with Arduino. The mechanical power is transmitted by a pulley and belt to the mechanism (see Fig. 4). The usage of such type of actuator and mechanism significantly reduces the final cost of the ventilator and is easily available in the whole country. The use of such a mechanism provides a versatile approach to control the stroke depth and stroke speed. This concept makes possible the control of frequency of breaths, pressure and tidal volume. These parameters are monitored and adjustable in commercial mechanical ventilators (Carvalho et al. 2007).
In Vent19, two fundamental parameters are the volume of air sent to the patient lung (i.e. the amount of BVM compression) and the briefing rate (i.e. how fast the BVM is compressed). These two parameters are monitored by measuring the position and the rotation speed of the large pulley that drives the lever, which in turn compresses the BVM. This measurement is achieved by three optical sensors. Two optical sensor detect the passage of each of 32 dark slits engraved in the pulley periphery. Both sensors are fixed, so that their reading signals are shifted in a few degrees. These signals give the angular displacement and speed of the pulley as well as the sense of the motion, under a resolution of 1/64 turn. The remaining third sensor detects the passage of a dark region that covers half of the pulley rotation. This third signal is used to get the absolute position of the pulley. The encoder attached to the pulley can be seen in Fig. 5.

Mechanical structure of the Vent19. The mechanical power is transmitted by a pulley and belt to the mechanism
The system mechanics is designed to be simple and robust, minimizing cost and fabrication time. It is an emergency device with a short lifespan. Different modes of actuation have been proposed, such as gripping arm (MIT 2020), compressed air (Oxford 2020), rack and pinion mechanism (Rice-University 2020), and electric linear actuator (EPUSP 2020; Mathanlal et al. 2020).
4 The Control Module
The control module has two layers of control. The lower layer controls the speed and position. Depending on the operation mode, different variables are controlled. When Vent19 is in volume control (Continuous Mandatory Ventilation (CVM)), the upper layer controls the tidal volume. If Vent19 is in pressure control (CVM) the upper layer controls the pressure. In CVM, the ventilator can be triggered either by the patient or mechanically by the ventilator. A basic distinction in mechanical ventilation is whether each breath is initiated by the patient (assist mode) or by the machine (support mode). Associated with the continuous control, Vent19 has a discrete control based on events. The discrete control opens and closes the solenoid valves. This section explains the two layer control, the discrete control and the user defined parameters.
4.1 The Lower Control Layer
A closed-loop control of position and pulley speed is used to adjust the inspiratory volume (pressure), ensuring fast action and accuracy. A simple rotary encoder is used for measuring the position of the pulley, implemented with a pattern illustrated in Fig. 5 and two pass optic sensors. This system allows measuring position, angular velocity and direction of movement. The limit position uses a reflective optic sensor and is only used when Vent19 is switched on.

Encoder with two strips: 1. The external strip represents the limit position; 2. The internal strip is observed by two optical sensors in quadrature; it is an encoder with direction information
The system dynamics is composed by a DC motor, transmission belt and pulley, which is modeled as a second order linear dynamic system. It considers the rotational inertia and damping (one of the poles is zero). Small imperfections in the fabrication process and motor variability can change the parameters that best fits the system. To account for that, an identification routine was developed.
This routine consists in applying maximum torque in altering directions to evaluate the rotational inertia and dumping constants. Inertial loads of the connecting rod and lever are neglected in this model. Note, however that it is possible to map the inertial loads of these components for each angle of the lever. Finally, there is a Kalman filter to estimate the position and speed of the pulley from three components: the motor PWM, the estimated load in the lever and the control signal sent to the motor, as illustrated in Fig. 6. The load in the lever is considered to be proportional to the BVM pressure, in which a constant is determined in the calibration step. For the position control, a full state feedback by the Kalman filter is used in conjunction with a feed forward of the load of the BVM.

Block diagram of the Vent19 control loop. The two control layers are represented here. In this representation, the variable under control is pressure, and it can be replaced by tidal volume. The Kalman filter has the inputs from the two optical sensors and the pressure
The optical sensors are connected to Arduino Mega digital inputs. The absolute position optical sensor is associated with one Arduino Mega interruption, preventing an encoder transition from being missed. The Kalman filter do not rely exclusively on the optical sensors and it can estimate intermediary position. Additionally, if a transition is missed, the Kalman filter will estimate the lost signal and determine the correct position. This interruption routine just reads the three optical sensors. The interruption routine is very short and does not interferes with the main loop. All of the arithmetic operations of the state observer are implemented in fixed point.
4.2 The Upper Control Layer
The pressure (tidal volume) control is implemented as a cascade control. The error, i.e. the difference between the measured and the desired pressure (tidal volume) is sent to a PID controller and its output is the input of the pulley position control loop. This controller follows a predetermined trajectory, given by Vent19 parameters. Figure 6 shows the control system of the Vent19.
4.3 User Parameters
As Vent19 is turned on, some input parameters must be set by the user:
-
Respiratory frequency: Number of times the patient repeats the inpiratory/expiratory cycle per minute. Usually varies between 8 and 40 cycles per minute, with increments of 2 cycles per minute.
-
Inspiration/expiration ratio: The ratio between the time spent during inspiration and expiration. Usually varies between 1:1 to 1:2, with increments of 0.2.
-
PEEP (Positive End-Expiratory Pressure): Minimum pressure of the ventilation circuit. Typically varies between 0 cmH\(_2\)O and 20 cmH\(_2\)O, with increments of 1 cmH\(_2\)O.
-
Oxygen mixture: Indicates the oxygen percentage of the gas mixture sent to the patient. Usually varies between \(20\%\) (oxygen content in the atmospheric air) and \(100\%\), with increments of \(5\%\).
-
Tidal Volume: Gas mixture volume sent to the patient for each respiratory cycle. This value depends on the height and gender of the patient. A typical value varies between 50 mL and 700 mL, with increments of 25 mL.
-
Pressure: Pressure sent to the patient for each respiratory cycle. A typical value varies between 5 cmH\(_2\)O and 30 cmH\(_2\)O, with increments of 1 cmH\(_2\)O.
-
Sensitivity: Minimum pressure variation that indicates the patient’s attempt to breathe.
-
Assist Mode: Patient attempt to breathe triggers the respiratory cycle.
-
Support Mode: Respiratory cycle is triggered by the ventilator.
-
Control Mode: Changes between tidal volume and pressure control.
All of the above parameters are presented in the 4 lines LCD screen and can be adjusted during the operation of the ventilator. Vent19 can be started/stopped by a proper button. Additionally, a snooze button is implemented to silence alarms. The three optical sensors are connected through digital pins. The pressure and two flow sensors use AD pins. The Motor driver uses a PWM pin. The three valves use digital pins.

Sensors, actuators, commands and user parameters. The core is the Arduino Mega microprocessor
4.4 Events Timeline
After setting the basic parameters, the user can start the mechanical ventilation. The microprocessor executes a PID algorithm to control the pulley position. The set position alternates between the black and white strips of the encoder corresponding to full BVM compression and defined respiratory volume, respectively. The above mentioned extended Kalman filter virtually increases the encoder resolution and a state observer compensates for nonlinearities of the mechanism. In summary, the microprocessor goes through the following tasks:
-
Read pressure near the patient. If the pressure is above 50 cmH\(_2\)O, a solenoid valve (valve 1 - PEEP Valve) is opened to prevent barotrauma (see Fig. 7).
-
If the measured pressure is below the defined PEEP value, valve 1 (PEEP valve) closes.
-
Immediately after the movement reversion, the BVM expands spontaneously due to its elasticity, creating in its interior a negative pressure. By simply opening the valve 1 or 2, the oxygen or the air flows into the BVM. By regulating the time during which each valve is open, the concentration of the oxygen in the air is adjusted.
-
Two air flow sensors are read. The first one measures the volume of oxygen and the second, the atmospheric air volume.
Figure 8 shows the time chart describing the timing of the various events in Vent19. The first line represents the rod reached the maximum compression. The second line has the pulley position, starting at maximum BVM compression. The third column corresponds to the rest position. Vent19 starts its operation in the rest position. The inspiratory and expiratory phases activate opposite directions of the DC motor. The third line represents the position of the rod obtained from the position control represented by the Kalman filter, explained in the previous subsection.

Events timeline. The first line represents the maximum compression. The second line has the pulley position. The third line represents the rod position. The fourth line represents the volume of gas mixture inside the BVM. The fifth and sixth lines respectively represent, the O\(_2\) and air valve operations. The seventh line has the pressure control and the eighth line represents the exhalation valve operation
The fourth line represents the amount of gas mixture volume inside the BVM. In the first column, the BVM is totally compressed with no gas mixture volume inside. As the rod releases the BVM, the gas mixture volume inside the BVM increases. In the third column, the BVM has its volume filled with gas mixture. From the third to the fourth columns, the rod compresses the BVM again and the BVM volume is decreased.
To start filling the BVM with gas mixture, it is necessary to open the O\(_2\) valve. The volume of O\(_2\) entering the BVM is measured by the input flow meter. As the appropriate volume of O\(_2\) enters the BVM according to the value configured by the user, the O\(_2\) valve is closed and the air valve is opened. The air valve is closed when the BVM is completely full again. The operation of the O\(_2\) valve is represented in the fifth line. The sixth line represents the operation of the air valve.
The seventh line has the pressure control graph. The plateau pressure is represented and the minimum pressure is the PEEP. When the Plateau pressure ends, the PEEP exhalation valve opens until it reaches the PEEP configured value. When the PEEP configured value is reached, the exhalation valve is closed. The eighth line has the exhalation valve control.

Vent19 is under pressure control, with 8 cycles per minute, inspiration/expiration rate is 1, plateau pressure is 18 cmH\(_2\)O and PEEP is 9 cmH\(_2\)O. (a) Encoder, representing the rod position. (b) Pressure sent to the patient in time. (c) Tidal Volume sent to the patient in time

Vent19 is under tidal volume control, with 8 cycles per minute, inspiration/expiration rate is 1, tidal volume is 500 ml and PEEP is 8 cmH\(_2\)O. (a) Encoder, representing the rod position. (b) Tidal Volume sent to the patient in time. (c) Pressure sent to the patient in time
Considering that Vent19 operates in pressure control, Fig. 9(a) shows the rod position, Fig. 9(b) shows the pressure in time and Fig. 9(c) shows the tidal volume in time. Figs. 10(a), (b) and (c) show similar graphs when Vent19 operates in tidal volume control.
5 Pneumatic Module
The pneumatic module consists of air and O\(_2\) mixture, two flow measure devices (input and output), three valves (air, O\(_2\) and exhalation), and two filters (HEPA and HMEF). The flow measure device was designed, tested and produced by our group. This section describes all these components with a special focus on the flow measure device.
5.1 Flow Measure Device

The venturi designed by our group
Flow rate is a critical parameter to be monitored. A higher flow rate leads to frictional losses occurring along the airway epithelium leading to tissue damage. Some emergency ventilators do not have flow measurements, such as E-Vent MIT (2020) and Inspire (EPUSP 2020). Flow rate sensors for air are based on ultrasonic principles, hot-wire anemometer and pressure difference across venturimeter. Mathanlal et al. (2020) used the hot-wire anemometer. We explored the pressure difference across venturimeter. Figure 11 shows the venturimeter designed by our group. We simulated using a CAE software and determined the appropriate dimensions. After calculations, prototypes for different throat diameters were constructed and tested. The final venture duct has a nominal diameter of 18 mm and throat diameter of 8 mm. The venturi was manufactured by a turning process and the holes were drilled at the appropriate positions.
A differential pressure sensor is connected to the two holes. We are using the MP3V5004DP from Freescale Semiconductor Inc which operates in the range of 0 to 40 cmH\(_2\)O. Vent19 has two venturis, one to measure the input flow and another to measure the output flow. The input flow is used in the control of the air and O\(_2\) mixture. The output flow is used in the tidal volume control mode, and to simply monitor the tidal volume when in pressure control mode. Due to the presence of a dc motor and solenoid valves that demands high current, the conduction of pressure sensor analog output up to the microprocessor required special cares.
The flow sensors in the venturi nozzles measure the pressure difference between an upstream section of the nozzle, with a cross-sectional area \(A_1\) and a choked section in the throat of the nozzle with a cross-sectional area \(A_2\). The Q flow is given by
where \(p_1\) is the pressure taken in the section upstream the nozzle, \(p_2\) is the pressure in the throat of the nozzle and \(\rho\) is the density of the gas flowing through the sensor. In practice, the sensor is calibrated so that the calculation is made as follows
The density difference between air and pure oxygen gas is relevant enough to modify the constant. The square root in (2) is implemented with a combination of a pre-computed table and the Newton-Raphson algorithm. Each Newton-Raphson iteration requires calculating an entire division, a relatively expensive operation in the processor employed for the control. In any case, the pre-computed table produces estimates close enough so that no more than 4 iterations of the algorithm are needed.
5.2 Pneumatic Circuit
The pneumatic circuit is responsible for the gas mixture flow in Vent19. Figure 12 illustrates the Vent19 pneumatic circuit. The Vent19, together with the one-way valves, sucks the mixture of air and oxygen and pressurizes it against the patient. The gas mixture enters the patient lung and it is expelled through an exhaust pipe. A filter called HEPA prevents the virus contained in the gas expelled by the patient from contaminating the environment. A second filter, called HMEF, promotes humidification and heating of the gas mixture entering the patient. As already mentioned, a sensor measures the pressure of the gas mixture next to the patient and two venturi flow meters check the volume of gas mixture entering and leaving the BVM.

Pneumatic circuit and the gas mixture flow. The circuit starts with the mixture of O\(_2\) and air by controlling valves 1 and 2. Two venturi flow meters measure the volume of gas mixture entering and leaving the BVM. One filter HEPA prevents the virus from contaminating the environment and one filter HMEF promotes the humidification and heating of the gas mixture. Valve 3 is the exhalation valve
Mixing oxygen with air in a desired proportion is often one of the crucial items in the development of a mechanical ventilator. Most commercial mechanical ventilators use compressed air and oxygen lines, employ valves that equalize the pressures of the two gases and perform the mixing by means of proportional valves. Such a valve is not manufactured in Brazil and, for this reason, domestic ventilator manufacturers are unable to supply hospitals with a sufficient quantity of equipment.
Here, a simplified strategy is adopted. If the rod reverts its motion, the BVM tends to expand spontaneously due to its elasticity, creating a negative pressure inside it. As at this moment, the lever no longer acts on the BVM, the negative pressure is the same in all cycles, regardless of the inspiratory volume. As valves 1 and 2 are identical and both gases, air and oxygen are at atmospheric pressure, the volume of gas that passes through each of these valves can be regulated through its opening time. Thus, the microprocessor opens valves 1 and 2 in sequence long enough to result in the desired mixture. Of course, the input gas volume is monitored through venturi 1 and the action is performed when the required volume passes through venturi 1.
The BVM has its own functionalities. In its outlet portion, the BVM has a special valve that, besides avoiding the gas to flow back to the BVM, conducts the gas exhausted by the patient to the atmosphere. In Vent19, this valve is removed. A new simple check valve is fabricated and installed. Figure 13 shows redesigned valve whereby the required unidirectional valve is kept, ensuring that the gas mixture only leaves the BVM. Also at the entrance, besides the main check valve, the BVM has two seconday check valves and an oxygen inlet port. In Vent19, all of these secondary elements are obstructed.

Two turned parts which can keep the unidirectional valve fitted on the BVM output
6 Security Items and the Supervisory System
As Vent19 is a life support equipment, it is essential that its operation is not interrupted by faults or external factors, such as lack of energy. Unfortunately, with the precarious structure of hospitals and field hospitals, deaths have already occurred due to lack of energy and failure in the generators. Thus, the Vent19 is equipped with an uninterrupted electric power supply module, which detects the power outage in the network through a relay and activates the emergency power system that employs two 12 V lead-acid battery. Through a capacitor bank, the system prevents the microprocessor from being restarted and keeps the system in operation for approximately one hour. In order to reduce costs with HMIs (human-machine interfaces) and to facilitate patient monitoring, a supervisory system was developed. The system is able to connect to several Vent19 simultaneously and receive data and adjust parameters remotely. The supervisory module consists of a single board computer (Raspberry Pi 3B), which is a low-cost miniaturized version capable of being powered by a battery. It has low power consumption and Bluetooth Low Energy (BLE) wireless connection, which is independent of the hospital infrastructure. The computer is coupled to a touch-sensitive LCD screen, on which graphics and data related to the patient are made available, eliminating the need for any peripheral.
In addition to monitoring, the system developed for the supervisory module also aims to ensure the usability of the Vent19 by adjusting the alarm limit, inactivating the alarm signals, selecting between different ventilation modes and accessing the ventilation parameters. The supervisory system also receives warning signals (visual and audible) emitted by the Vent19.

Supervisory system for a configuration with four mechanical respirators
The proposed supervisory system allows the simultaneous connection of several Vent19 via wireless connection, via BLE, as shown in Fig. 14. This type of connection is ideal as it has low energy consumption, in addition to the range and data transmission speeds suitable for the application. For a connected device, one of two possible modes of operation is assigned: active or alarm only. At any given moment, only one device can be operating in active mode; the others must then operate in alarm mode. The supervisory system monitors the data transmitted by the active Vent19, displaying the graphs with pressure, volume and flow in real time. In addition, the active device is the only one that can be configured from the supervisory system. All devices, however, are able to send an alert signal to the supervisory module at any time. This is responsible for alerting the user to this alarm, giving the option to deactivate the alarm when appropriate. It is worth mentioning that changing the active device is quite simple and fast, allowing for easy monitoring of multiple Vent19, contained in the same room.
6.1 Alarms

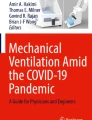
Several views of the Vent19 fourth prototype. (a) Command Buttons, Pressing Shoe, BVM, Display and Commands, Bed, Gas Hoses. (b) Gas Hoses, Emergency Button, BVM, Pressing Shoe, Command Buttons. (c) Pressing Shoe, Swing Arm, BVM, Bed, Gas Hoses. (d) Pressing Shoe, Battery 1, Swing Arm, BVM, E + M (Electronic and Motor Compartment), Bed, Battery 2, S + V (Sensors and Valves Compartment), Hose, Hoses. (e) Hose, E G (Exhaust Gas Isolated Compartment), V F S (Venturi Flow Sensor), Power Source, Hoses
An important part of the guidelines published by ANVISA is related to alarms. Vent19 is a life support equipment and must have an alarm system, alerting in case of equipment failure. The alarm system developed has three levels: low, medium and high priority. The alarms emit audible and visual alerts in the equipment and in the supervisory system. The alarms are categorized by degrees of urgency according to the ABNT standards 60601-1-8 (ABNT 2014a). Additionally, some alarms are extremely important in the development of mechanical ventilators. They are related to the operation of the mechanical ventilators and they are described in the ABNT standard 80601-2-12 (ABNT 2014b) as mandatory in the development of any mechanical ventilator.
For the operation of Vent19, an eventual failure of the power supply will trigger a high priority alarm in the event of a fall below the values necessary to maintain normal operation. Due to the use of a power failure detection system, a low priority alarm will be triggered when switching to the battery supply system. At this moment, battery monitoring is carried out so that medium and high priority alarms are triggered to inform about the exhaustion before all the energy is lost.
7 Fourth Prototype
Atlas-Schindler and Engrenar technical groups are working hard to make a product design for Vent19. The fourth prototype will be more compact when compared with the actual prototype. The concept of the movement transmission is almost the same, but in the latest prototype we reduced the number of pieces. The new mechanism can be seen in Fig. 15(e). It contributed to the volume compaction.
The user interface has the same four push buttons, one dial and the LCD \(4 \times 20\) screen. They are visible in Figs. 15(a) and (b). The DC motor and motor driver are inside a metallic cage placed backwards; they can be seen in Fig. 15(d) after the removal of the metallic cage. The metallic cage will reduce the electromagnetic radiation. The emergency button is on top of the device, as can be seen in Figs. 15(a), (b) and (c).
The BVM is placed on the left side of Vent19; this arrangement facilitates its replacement whenever necessary. Vent19 has two batteries, which will allows its usage if no electricity is available for a longer time. The batteries can be seen in Fig. 15(d). The power source is placed in the lower part, as can be seen in Figs. 15(d) and (f). The pneumatic circuit is also in the lower part. Fig. 16(a) shows a zoom view of the pass optical sensors and their fixation. Fig. 16(b) shows the pulley and the encoder represented in it. The two strips were inverted, when considering the original version in Fig. 5.

Details of the pass optical sensors and their coupling with the encoder machined with the pulley. (a) MS (Motor Shaft), 2X ST PS (2 x Slot Type Photo Switches), Disc with 32 Windows, DC Motor, Swing Arm. (b) The disc with the 32 windows and the limit layer in brown
8 Conclusions and Future Works
In response to the COVID-19 pandemic and facing the risk of losing countless lives due to the lack of a mechanical ventilator, this project aimed to develop an emergency mechanical ventilator called Vent19, which is an automation of Bag Mask Valve - BVM use. Based on an as much as possible simplified mechanics and electronics, Vent19 was designed to have functionalities close to commercial mechanical ventilators. This functionality is achieved through a Mechatronics architecture, using sensors, actuators and a microcontroller. All the elements can be easily obtained in the Brazilian domestic market. The complexity resides in the advanced control algorithm, which is a computer program that can be easily replicated.
The fourth prototype is in the final stage of development. Once completed, its performance will be assessed on a bench using a mechanical lung. Then it will be tested on animals.
References
ABNT (2014a) NBR IEC 60601-1-8. Associação Brasileira de Normas Técnicas, Rio de Janeiro
ABNT (2014b) NBR ISO 80601-2-12. Associação Brasileira de Normas Técnicas, Rio de Janeiro
ANVISA (2020) Resolução - RDC n\(^\circ\) 386, de 15 de maio de 2020. DIÁRIO OFICIAL DA UNIÃO Edição 92-B, Seção:1 - Extra:3
Carvalho CRR, Toufen Junior C, Franca SA (2007) Ventilação mecânica: princípios, análise gráfica e modalidades ventilatórias. J Brasileiro de Pneumologia 33:54–70
Castro-Camus E, Ornik J, Mach C, Hernandez-Cardoso G, Savalia B, Taiber J, Ruiz-Marquez A, Kesper K, Konde S, Sommer C, Wiener J, Geisel D, Hüppe F, Kräling G, Mross P, Nguyen J, Wiesmann T, Beutel B, Koch M (2020) Ventilators for emergency use based on bag-valve pressing systems: Lessons learned and future steps. Appl Sci 10:7229
EPUSP (2020) Inspire. https://www.poli.usp.br/inspire
Fang Z, Li AI, Wang H, Zhang R, Mai X, Pan T (2020) AmbuBox: A fast-deployable low-cost ventilator for COVID-19 emergent care. SLAS Technology 25(6):573–584
Hidayat S, Halid J, Dirgantara T, Kusuma MA, Utomo H, Sudjud RW, Rejeki IS, Mihradi S, Raharno S, Rukanta D, Tjahjono H (2020) Lessons learned from rapid development of CPAP ventilator vent-i during COVID-19 pandemic in indonesia. J Eng Tech Sci 52(5):765–778
Khan Y, Fahad HM, Muin S, Gopalan K (2020) A low-cost, helmet-based, non-invasive ventilator for COVID-19. arXiv preprint arXiv:200511008
King WP, Amos J, Azer M, Baker D, Bashir R, Best C, Bethke E, Boppart SA, Bralts E, Corey RM, Dietkus R, Durack G, Elbel S, Elliott G, Fava J, Goldenfeld N, Goldstein MH, Hayes C, Herndon N, Jamison S, Johnson B, Johnson H, Johnson M, Kolaczynski J, Lee T, Maslov S, McGregor DJ, Milner D, Moller R, Mosley J, Musser A, Newberger M, Null D, O’Bryan L, Oelze M, O’Leary J, Pagano A, Philpott M, Pianfetti B, Pille A, Pizzuto L, Ricconi B, Rubessa M, Rylowicz S, Shipley C, Singer AC, Stewart B, Switzky R, Tawfick S, Wheeler M, White K, Widloski EM, Wood E, Wood C, Wooldridge A (2020) Emergency ventilator for COVID-19. PLoS ONE 15(12)
Kwon AH, Slocum J A H, Varelmann D, Nabzdyk CGS, Araki B, Abu-Kalaf M, Detienne M, Hagan D, Hanumara N, Jung K, Ort T, Ramirez A, Rojasv F, Rus D, Servi A, Shaligram S, Slocum J A, Slocum J, Unger C, Connor J, Ku B, Kwon A, Nabzdyk C, Callahan J, Karamnov S, Lurie KG, Olson N, Ray N, Rosen M, Shafer S, Sparks S, Pradhan-Nabzdyk L, Husseini AMA, Negrete J, Powelson S, Lee HJ, on behalf of the MIT E-Vent Team (2020) Rapidly scalable mechanical ventilator for the COVID-19 pandemic. Intens Care Med 46(8):1642–1644
Majid B, El Hammoumi A, Motahhir S, Lebbadi A, Abdelaziz EG (2020) Preliminary design of an innovative, simple, and easy-to-build portable ventilator for COVID-19 patients. EuroMediterr J Environ Integr 5(2):23
Mathanlal T, Israel Nazarious M, Mantas-Nakhai R, Zorzano MP, Martin-Torres J (2020) ATMO-vent: An adapted breathing atmosphere for COVID-19 patients. HardwareX 8:e00145
MIT (2020) E-Vent. https://e-vent.mit.edu
Moreira RdS (2020) COVID-19: unidades de terapia intensiva, ventiladores mecânicos e perfis latentes de mortalidade associados á letalidade no Brasil. Cadernos de Saúde Pública 36
Oxford (2020) OxVent. https://oxvent.org/
Pearce JM (2020) A review of open source ventilators for covid-19 and future pandemics. F1000Research 9
Ranney ML, Griffeth V, Jha AK (2020) Critical supply shortages - the need for ventilators and personal protective equipment during the COVID-19 pandemic. New Engl J Med 382(18):e41
Rice-University (2020) ApolloBVM. http://oedk.rice.edu/apollobvm/
Truog RD, Mitchell C, Daley GQ (2020) The toughest triage - allocating ventilators in a pandemic. New Eng J Med 382(21):1973–1975
UK-MHRA (2020) Rapidly Manufactured Ventilator System (RMVS) Guidelines from UK-MHRA. https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/879382/RMVS001_v4.pdf
Vasan A, Weekes R, Connacher W, Sieker J, Stambaugh M, Suresh P, Lee DE, Mazzei W, Schlaepfer E, Vallejos T, Petersen J, Merritt S, Petersen L, Friend J, Acute Ventilation Rapid Response Taskforce (AVERT) (2020) MADVent: A low-cost ventilator for patients with COVID-19. Medical Devices & Sensors 3(4):e10106
Zhang X, Shah YH, Tumuluru N (2020) Proposal for a low-cost high-fidelity ventilator for COVID-19 pandemic. engrXiv
Zuckerberg J, Shaik M, Widmeier K, Kilbaugh T, Nelin TD (2020) A lung for all: Novel mechanical ventilator for emergency and low-resource settings. Life Sci 257:118113
Acknowledgements
We thank the Amigos da Poli fund for the financial support to the project. M. S. G. Tsuzuki, O. Horikawa and T. C. Martins were partially supported by CNPq (respectively, proc. 311.195/2019-9). A. K. Sato and N. Tanabi are supported by FUSP/Petrobras. We thank Prof. Dr. Henrique Takashi Moriya from Escola Politécnica da USP for his support with the mechanical lung. We also thank Prof. Dr. Jose Pinhata Otoch from the USP Faculty of Medicine for his support with animal tests.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Tsuzuki, M.S.G., Martins, T.C., Takimoto, R.T. et al. Mechanical Ventilator VENT19. Polytechnica 4, 33–46 (2021). https://doi.org/10.1007/s41050-021-00031-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41050-021-00031-z