
Abstract
Special event traffic planning and management needs to accommodate high traffic demand volume and special distribution patterns with dramatic structural deviations from the normal conditions. To provide sufficient transportation service supply that matches non-typical demand needs, this paper explains how to systematically optimize the locations of park-and-ride stations, the number of additional parking lots, and the bus rapid transit schedules. The goal is to maximize the number of travelers who can complete their activity tours within a reasonable travel time budget. Based on a space–time network construct, this paper formulates a network design problem to maximize the system-wide transportation accessibility from different origins to activity locations at special event sites. A linear integer programing model is proposed to formulate the joint optimization of the location and capacity of parking lots associated with mega-event sites. Illustrative and real-world examples are used to examine the effectiveness and practical usefulness of the proposed modeling framework.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
1.1 Motivation and Problem Illustration
For regular days, transportation demand can be represented as a repeated stochastic process with similar within-day dynamic patterns. A majority of transportation planning efforts have been devoted to accurately predicting and managing regular OD demand patterns, especially in the context of long-range transportation planning. On the other hand, it is extremely important to fully recognize various structural deviations of complex OD traffic desires from the normal condition, which could be caused by special events, severe weather conditions, dramatic responses of travelers under traffic incidents, as well as other demand management strategies.
Specific event traffic management needs to accommodate unusually high traffic demand volume and special spatial distribution patterns due to sports games, concerts, holidays, or other major reactional activities. In recent years, many regional planning organizations are also actively involved in the medium-term transportation planning of mega events, for example, major trade shows such as World Expo, large sport events such as Olympics Games, to boost the regional economic attractiveness and competitiveness.
A mega event can generate an extraordinarily high concentration of traffic superimposed on urban traffic networks for a few weeks. As an example, an Olympic game could not only attract daily travelers of 500,000 but also requires logistics personnel of 200,000 in size, which leads to almost 1.5 million trips on each day [1]. Accordingly, the transportation organization/authorities need to carefully plan and manage a coordinated multi-model infrastructure and service network. This will mitigate the potential traffic congestion while fully maintaining the accessibility to event sites. In this paper, we focus on how to optimize the location and capacity of additional parking lots. This will be particularly associated with park-and-ride stations, to allow a large number of visitors to successfully complete a trip chain within a reasonable travel time budget.
To improve the accessibility to the mega-event site, we will determine the locations and capability of park-and-ride (P&R) stations, which is critically important because they can facilitate the interchange between the private/lower occupancy mode to the public/higher occupancy mode. This will further help to complete trip chains through a sustainable multi-modal service network provision [2]. In recent Olympic Games, ranging from Atlanta in 1996 to London in 2012, P&R mode has demonstrated its capability in integrating an accessible public transport system to a well-planned and comprehensive transportation system for managing complex traffic demand at those mega events [3].
Planning and managing intermodal traffic demand/supply systems for special events is theoretically and practically challenging in its own right. To clearly illustrate the essential modeling elements and complexity of this problem, we use Fig. 1 to describe the problem of joint optimizing parking lot location and capacity for traffic demands in a special event. As shown in Fig. 1, visitors have trip desires to travel from multiple origins (O1, O2, O3, O4) to the mega-event site (D). Visitors can reach destinations through driving links (L1, L2, L3, L4), transit links (T1, T2), or P&R mode that combines the use of driving and transit links. Park-and-ride lots P1, P2, P3 are used to connect the road network and the transit network. The final parking lot on link L4 allows driving-only travelers to park their cars and then walk to the mega-event site. In a complex user-equilibrium context, a traveler needs to make a departure time/mode/route decision to minimize his/her own traveling disutility that involves travel time/delay, transit and parking fares. From a transportation system management perspective, when the detailed transit fare has not been finalized yet, it is better to consider system-wide objectives such as minimizing the total travel time or maximizing the space–time accessibility to the event site, that is, the number of travelers who can complete their tours within a reasonable travel time budget. In this case, there are still a wide range of traveling options available and many of them are dependent on the locations and capacity of parking lots, traffic condition on the (driving) road network, as well as the capacity and schedule of transit services. For example, a visitor from origin O1 can drive along the road network O1 → L1 → L2 → L3 → L4 → D. If link L3 is congested or parking lot on link L4 is saturated, he/she might consider an intermodal option through route O1 → L1 → L2 → P2 → T2 → D by parking the car at P&R lot P2. If the capacity at parking lot P2 is still not sufficient, the visitor will need to consider driving a short distance to P&R location P1, through route O1 → L1 → P1 → T1 → T2 → D, or taking a transit-only route through route O1 → P1 → T1 → T2 → D.

Parking lot location and capacity optimization problem in an intermodal network
For a more complex situation, in a real-world large-scale network, large numbers of visitors travel from multiple origins to the special event site. They dynamically choose their routes to the destination, and strongly interact with each other. Under some emergent or unusual situations (e.g., accident, bad weather condition), congestion will form unexpectedly and travelers may dynamically switch their routes or be forced to change route informed by traffic managers. If there is sufficient information provision (such as VMS, radio, mobile phone Apps), travelers may dynamically change their routes, departure time, or even travel mode when they meet some heavy congestion, e.g., Gao et al. [4] discussed the crowd’s dynamic route choice behavior during evacuations with sufficient information. Besides, changing mode can of course improve the accessibility to the event. In this paper, we consider more realistic but potentially complicated dynamic route/mode choice behaviors.
1.2 Literature Review
In general, there are a number of practical guidelines used in programing an event-based transportation management plan [5], which could have three major components; namely traffic management plan, transit plan, and travel demand management initiatives. These plans are critically needed to encourage event attendees to choose public transit as the primary mode especially in a mega event such as Olympic Games [6]. P&R is a key bridge to connecting the spatially distributed potential attendees to the public transit and then to the event site. There are a number of related studies in two categories, namely (i) survey-based empirical investigation and (ii) model-based optimization analysis. In the first category, a number of studies examine the practical effectiveness of P&R facilities, for example; Meek et al. [7] suggested that P&R might increase the average travel distance due to low load factors on dedicated buses, public transport abstraction, and trip generation. The second category of studies focus on modeling travelers’ parking searching behavior and finding an optimal solution for designing and operating parking facilities. There are mainly five categories of research lines, e.g., parking searching and pricing, traditional network design problems, park-and-ride facility network design problems, intermodal simulation and assignment, and general space–time network. More technical details are provided in the references listed in Table 1.
The research on travelers’ parking searching behavior aims to find the user-equilibrium solutions under different parking facilities' constraints [8–16]. Based on the route choice behavior under parking facilities, researchers have extended the traditional network design problems [17–22] to park-and-ride facilities' network design and location problems [23–26]. Considering the optimal location and pricing of a P&R facility simultaneously in a linear monocentric city, Wang et al. [23] aimed to find a deterministic mode choice equilibrium solution with objective functions as profit maximizing and social cost minimizing. Liu et al. [24] proposed an improved model based on deterministic continuum equilibrium that can be formulated through a super-network approach.
Another category of studies aim to simulate and implement the dynamic network loading process in both single-modal road network and multi-modal transit network [27–39]. These approaches can be applied to the intermodal infrastructure and service network design for special event management which has its own unique characteristics. Compared to the common system-optimal objective function that minimizes total travel time for a given OD demand, the special event organizers typically want to attract more visitors from different origins to attend the event in a reasonable time interval. Therefore, the space–time concept has been included to study the activity characteristics [40–48], e.g., finding the optimal trip chain under activity and time budget constraints, calculating the travel accessibility.
In this case, the space–time accessibility to the special event site is more relevant or important to achieving the overall management goal, compared to the simple mobility measure. While there are a wide range of studies (e.g., 40–43) examining accessibility-oriented strategies, a few researchers recently started systematically incorporating accessibility/connectivity measures in a network design modeling framework. To name a few, Santos et al. [44] introduced a transportation network design problem based on equity and accessibility. The activity-based network design problem studied by Kang et al. [45] aims to minimize both the network design costs and activity-related disutility using a bi-level model. In this paper, we extend a recent network design model by Tong et al. [48] that maximizes space–time accessibility, based on a space–time prism analysis framework established by Miller [42]. Modeling the parking searching behavior under different pricing policies is a complicated and difficult task, this paper will only consider the simple but most important parking lot capacity constraint to describe the parking searching behavior without loss of generality.
The remainder of this paper will be organized as follows. First, we formulate the related network design problem within a space–time network to improve individual visitors’ accessibility of reaching desired activities at the special event from different origins. This is followed by a linear integer programing model for joint optimization of the location and capacity of parking lots. After presenting a Lagrangian decomposition-based solution approach [48, 49], we use illustrative and real-world examples to examine the effectiveness and practical usefulness of the proposed modeling framework.
2 Model Formulation
In this study, we consider an intermodal urban transportation network, where travelers reach their destinations via different travel modes, such as transit (bus, Bus rapid transit (BRT), subway), driving (private car, HOV), and combined mode (park and ride). This multi-modal network can be modeled as a multi-layer network [31] for dynamic traffic assignment with integrated management strategies, where travelers using different modes have mode-specific penalty or costs and need to consider service or road capacity constraints at different layers.
The space–time accessibility measure for a special event needs to consider a trip chain that starts from a particular location, reaching the activity location, and then return back home within a travel time budget. In this case, if the road network is too congested or parking lots have limited capacity, then it is difficult to enable a large number of travelers to complete their activity chains. Thus, it is important to formulate an integrated network design model to maximize individuals’ accessibility through parking lot location and capacity optimization while subject to the construction budget constraint and various flow and parking capacity constraints.
2.1 Space–Time Accessibility for Travelers Attending Special Events
The first modeling task is to build an intermodal space–time network. The analysis system horizon is discretized into T time intervals, and each time interval represents \( \sigma \) minutes or seconds. To better characterize the accessibility measure for a trip chain, we consider a traveling time budget TTB. If a person needs to spend \( T_{w} \) minutes at the event location, then there is only a remaining time of \( {\text{TTB}} - T_{\text{w}} \) for traveling activities between the origins and the event location. Similar to the space–time prism concept [48], we define the activity location at the special event site is accessible if it can be reached within time budget \( {\text{TTB}} \), under actual traffic conditions (e.g., free flow or congestion) and parking lot availability restriction in the intermodal network.
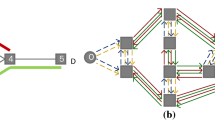
To construct an equivalent network flow model with essential flow balance conditions at each vertex, as shown in Fig. 2, we add virtual traveling arcs to connect the origin node and the final time \( t_{0} + {\text{TTB}} \). Within a network flow formulation framework, the virtual arc connects from the origin at the start time to the same origin node at the end time to allow all solutions to be feasible. For example, if the driver arrives at 18:30, which is not accessible within the total time budget (an unfeasible solution), and he/she is forced to reach destination directly through the virtual arcs.

Illustration of space–time accessibility to a special event site
By introducing waiting arcs at the origin and activity-performing arcs at the activity location, a feasible tour is generated within the space–time prism (with both total time budget constraint and activity-performing constraint). More specially, the examples in Fig. 2 consider the total activity time \( T_{\text{w}} = 3\,{\text{h}} \), and the total time budget is \( T = 10\,{\text{h}} \). In Fig. 2a), a visitor makes the trip by the driving-only mode, he/she will depart at 8:00 and return origin at 15:00 when the traffic condition is reasonably good.
Under congested road traffic conditions, using transit lines and P&R facilities can improve the space–time accessibility. In Fig. 2b), the green line illustrates an example of an improved accessibility with better parking lot locations and sufficient capacity. The visitor can return back to the origin at 17:00 by P&R trip mode. However, the parking lot capacities and locations also affect the individual’s accessibility goal. If the visitor has to drive a much longer distance to reach the parking lot, e.g., the red-dashed line driving to parking lot PL #2 as shown in Fig. 2b), or the capacity of the parking lot is not sufficient, e.g., the blue-dashed line driving to parking lot PL#1, as shown in Fig. 2b), he/she still has difficulties to reach the special event site within the travel time budget (e.g., only arrive at the node N at 18:00 within the total time budget).
2.2 Math Formulation
Table 2 lists the notations for the key parameters and variables. The variables' definitions and formulations are extended from the framework by Tong et al. [48].
The proposed transportation network design problem considers a set of nodes and links. In the constructed space–time network, the space time arcs \( A \) are defined by a 5-index matrix \( x_{i,j,t,s} (p) \), and the transportation space–time arcs have zero inaccessibility costs \( c_{i,j,t,s} \left( p \right) \), while the \( c_{i,j,t,s} \left( p \right) \) = 1 for virtual arcs associated with the virtual arc for the inaccessible activity chain is illustrated in Fig. 2. The binary variable \( y_{i,j} \) represents whether the parking lot (i, j) is selected to be constructed.
Given travel time budget \( {\text{TTB}}(p) \), origin \( o^{p} \), departure time \( \tau^{p} \) for each agent \( p \), the problem under consideration aims to minimize the system-wide space–time inaccessibility measure, subject to a number of capacity and construction budget constraints. Then, the inaccessibility minimizing, i.e., accessibility maximizing, objective function is reformulated as an integrated optimization problem for joint locating parking lots and corresponding parking space capacity.
Objective function The objective function to be minimized is now formally stated as Eq. (1).
That is, if a traveler p can perform the activity at the special event site d within the given time budget, then its resulting activity chain-related inaccessibility cost is zero, otherwise, the cost is 1 by traveling through the virtual arcs. Equivalently, this objective function wants to minimize the total number of inaccessible trip chains across all agents who have desires to make the trips. It should be mentioned that, the cost matrix in the objective function [1] is for inaccessibility computation, which could be quite different with the travel time. We will use s i,j to describe the free flow or experienced time-dependent travel time for link (i,j). Travel time is embedded in the arcs (i,j,t,s = t+s i,j ) in the space–time network.
There are 6 types of constraints in our model, namely the space–time flow balance constraints, activity-performing constraints at special event site, traffic flow capacity constraints, park-and-ride facility constraints, transit service constraints, and total construction budget constraint.
(1) Space–time flow balance constraints
(2) Activity-performing constraints at special event site
The space–time activity-performing arcs at special event site and virtual traveling arcs for passenger \( p \).
(3) Traffic inflow and spatial capacity constraints
A spatial queue mesoscopic traffic flow model is applied to describe the traffic flow constraints. That is, the total inflow r constraint:
The number of cumulative arrival and departure agents on the link \( (i,j) \) can be represented as:
Here, for link (i,j), \( s_{i,j} \) is the free flow or experienced travel time, \( L_{i,j} \) is the length, and \( K_{i,j}^{\text{jam}} \) is the jam density. For more details on queue-based dynamic traffic simulation, please refer to Zhou et al. [48].
(4) Park-and-ride facility constraints
(i) Capacity associated with cars arriving and departing at parking lots: the cumulative number of arrival agents minus the cumulative number of departure agents could not exceed the space capacity of the parking lot.
(ii) The consistency constraints for using the same parking lot: each passenger agent should visit the same parking lot when parking and finding his/her car in the entire trip chain.
(5) Transit service constraints
Transit service constraints: transit vehicles can only drive on specific space–time arcs defined by the given transit schedule. The number of passengers served by a transit schedule space–time arc should not exceed the passenger-carrying capacity of a transit v.
(6) Total construction budget constraints
The total construction cost for selected parking lots should not exceed the total construction budget.
3 Lagrangian Decomposition-Based Heuristic Solution Algorithm
In this section, a Lagrangian decomposition (LD) algorithm is introduced to reformulate and further decompose the integer linear programing problem [48, 49]. This relaxation scheme allows parking lots to be overloaded, but penalizes it in the objective function. According to recursive calculation, the penalties will be updated iteratively, finally giving the marginal benefit of increasing capacity at those lots. First, we have the original problem P1.
Problem P1
s.t. Constraints (2–9) and binary constraints for variable vectors \( \varvec{X} = [x_{i,j,t,s} \left( p \right)] \) and \( \varvec{Y} = [{\text{y}}_{i,j} ] \).
By dualizing coupling capacity constraint (6), which links two sets of variables \( \varvec{X} \) and \( \varvec{ Y} \), we have a combination of two relatively easy-to-solve problems: P X as a set of constrained time-dependent routing problem for passenger agents embedded in a multi-modal dynamic traffic assignment program subject to constraints (2, 3, 4, 5, 7, 8), and P Y as a knapsack problem subject to the total construction budget constraint (9). Interested readers are referred to Tong et al. [48] for detailed descriptions of LD solution approach with a similar modeling framework.
The dualized Problem P2 can be written as
This problem is to minimize the total number of inaccessible trip chains across all agents and the total penalty cost under P&R capacity constraints.
Based on a dual optimization perspective, the Lagrange multipliers \( \pi_{i,j,t,s} \) can also be interpreted as shadow price associated with P&R capacity constraints. The solution steps of the proposed algorithm can be listed as follows:
Step 1: Initialization
Set iteration number \( k = 0, \) the set of available parking lot locations are given in terms of links in set \( E^{P}, \) and total construction budget \( {\text{TCB}} \).
Choose positive values to initialize the set of Lagrangian multipliers \( \pi_{i,j,t,s} .\)
Step 2: Solve decomposed dual problems
Step 2.1: Solve sub-problem P X using an enhanced multi-modal dynamic traffic assignment (DTA) simulator with a time-dependent least cost path algorithm and find a path solution \( \varvec{X}(p) \) for each agent \( p \).
A spatial queue-based traffic flow simulator, such as DTALite [39], is used to ensure the traffic inflow and spatial capacity constraints (4) and cumulative flow count definitional constrain (5) and transit service capacity constraint (8) are all satisfied for all traveling agents through a multi-modal dynamic network loading (DNL) program. Specifically, in a transportation network, a node is connected to different incoming links and outgoing links, and each link has two buffers in DNL, namely entrance buffer and exit buffer to facilitate traveling agents’ transfers between links. These two buffers on each link are commonly implemented as first-in-and-first out (FIFO) queues. When the required link inflow and outflow capacities are available, an agent can move from the exit buffer of an upstream link to the entrance buffer of the downstream buffer.
To handle the remaining constraint sets (2, 3), namely space–time flow balance constraints and activity-performing constraints, with the dualized objective function in Eq. (10), a time-dependent routing problem with a set of constraints is solved for passenger agents. Specifically, each arc \( \left( {i,j,t,s} \right) \) in the available P&R locations (i.e., \( E^{P} \)) has an additional cost of \( \pi_{i,j,t,s} \) for the dualized capacity constraints, which is equivalent to the estimated travel time penalties when agents use park-and-ride facilities. The space–time flow balance constraints are satisfied automatically in the routing algorithm, and the remaining activity-performing constraints at special event site can be handled through a simple decomposition to two trips. One from the origin to the special event site, and the other from the special event site back to the origin. Under road traffic congestion or large travel time penalty associated with \( \pi_{i,j,t,s} \) at the parking lots, the travel time budget constraint \( {\text{TTB}}(p) \) might not be satisfied, and the routing algorithm will minimize the number of inaccessible virtual arcs as the total disutility. It should be remarked that, even there are optional P&R capacity available, some travelers (with the goal of accessibility maximization) could still select driving-only mode, if the related road traffic condition is less congested.
Step 2.2: Solve sub-problem Py, for example, using a dynamic programing algorithm, to find a value for \( \varvec{Y} \). The dual cost \( \pi_{i,j,t,s} \) associated with the dualized P&R capacity constraints will encourage the decision makers to select the most cost-effective P&R station location/capacity allocation option to maximize the total dual cost (i.e., profit) to be collected through a knapsack modeling framework, which is equivalent to maximize \( \mathop \sum \limits_{{\left( {i,j,t,s} \right) \in A:(i,j) \in E^{P} }} \left\{ {\pi_{i,j,t,s} \times \left[ {cap_{i,j}^{P} \times y_{i,j} } \right]} \right\} \) subject to constraint (9).
Calculate primal, dual, and gap values of P2.
Step 3: Update Lagrangian multipliers
Update Lagrangian multipliers \( \pi_{i,j,t,s} \) using subgradient \( \pi_{i,j,t,s} + d^{k} \times \left[ {A_{ij} \left( t \right) - D_{ij} \left( t \right) - cap_{i,j}^{P} \times y_{i,j} } \right], \) where \( d^{k} \) is the step length at iteration \( k \).
Step 4: Termination condition test
If \( k \) is less than a predetermined maximum iteration value, or the gap is smaller than a predefined toleration gap, terminate the algorithm; otherwise \( k = k + 1 \) and go back to Step 2.
4 Numerical Examples
4.1 3-Corridor Network for Testing Model Choice Sensitivity of Multi-Modal Network Loading
A 3-corridor network is constructed, as demonstrated in Fig. 3, to illustrate the proposed accessibility-maximization model. Node 1 represents the original location of travelers and node 12 represents the special event or mega-event location. The red lines represent a roadway system allowing passenger cars. The green lines represent dedicated BRT lines, which assign the right of the way to BRT vehicles only. The driving link 4–8–7 and 6–9–7 allow passenger cars to drive to the parking lots and connect to BRT stations.

3-corridor intermodal network
Three demand types are considered in this intermodal network, which includes driving alone (demand type 1), BRT (demand type 2), and Park & Ride (demand type 3). For simplicity, the total demand is assumed to be fixed, including 510 driving-only users and P&R users, 800 transit users, and 560 vehicles per hour background vehicles. During the trip, only en-route users can change their trip modes (P&R, driving only).
To investigate the effect of different levels of background traffic (driving only) on roadway network, a comparison of base and high driving-alone demand is conducted. Using DTALite [39], a queue-based mesoscopic traffic simulator, and the proposed LD algorithm, the problem is then solved and convergence is achieved by 20 iterations. The two demand scenarios are listed in Table 3. It can be seen that with the capacity of parking lot increasing, the number of pedestrians choosing P&R mode will increase from 50 to 396, and the average travel time can reduce to 147.9 min. The accessibilities of different time budgets are also listed in Table 3. The large parking lot capacity could also lead to a better accessibility, e.g., the accessibility measure increases from 52.53 to 56.64 %, for a specific TTB = 145 min.
Figure 4 shows the relative gap and LB (lower bound) and UB (upper bound) with different scenarios of each iteration with our algorithm. Typically, the lower bound estimates are improved significantly during the first few iterations, and the duality gap between the upper bound and the lower bound estimates can be reduced dramatically to a relatively small difference after a certain number of iterations. In scenario 1, P&R is located on link 8 → 7, and the inaccessible agents is about 242; while in scenario 2, P&R is located on link 9 → 7, the inaccessible agents decrease to 208. It seems that the P&R station is beneficial to be located on link 9 → 7. Here, the locations of P&R facilities are decision variables in this paper, and the variables can be regarded as space-discrete variables. For larger networks, we can also predetermine some alternative patterns to reduce the feasible solution space and make the problem easier to solve.

Relative gap and LB and UB of different scenarios (scenario 1: P&R on link 8 → 7, scenario 2: P&R on link 9 → 7)
4.2 Real-World Testing Case Study
In this paper, we use a real-world testing case study for further examining the practical usefulness of the proposed methodology. Specifically, we consider International Horticultural Exposition 2019, Beijing, China (hereafter referred to as Beijing Expo 2019) which will be held in the Yanqing district, Beijing, from 29th April to 7th October 2019. Beijing Expo 2019 is expected to have more than 100 official exhibitors, more than 100 other exhibitors and more than 16 million visitors as an initial traffic demand estimation, and the expected range of potential visitors will be 34–37 million according to additional surveys.
As shown in Fig. 5, the proposed analysis methodology is applied to the Yanqing District study area to examine the effectiveness of the parking lot location and capacity allocations on traffic flow conditions/mobility and space–time accessibility. In this network, there are 66 OD zones, 1519 nodes, 3299 links with 22 different multi-modal link types. To meet the dramatically increased traffic desires for this mega event, transit lines and parking lot facilities need to be well designed. At present, there are 2127 transit lines and 8 planned P&R facilities.

Traffic network representation of Yanqing District, Beijing, China
According to the proposed LD-based solution algorithm, we generate several representative scenarios with suggested/optimized parking plot locations and capacity allocation schemes. That is, Scenario 1 considers only transit and driving network without P&R or BRT; Scenario 2 considers one new BRT line, but no P&R facilities to transfer to the BRT line; Scenarios 3–6, under different total construction budget TCB, 5–8 parking lots can be built to allow visitors to transfer to the BRT line. To investigate the effectiveness of BRT line and parking lot facilities on the travelers’ space–time accessibility, 142,318 agents (visitors) are assumed to attend to the special event on a peak-hour period, and they can travel by three modes, i.e., driving only, transit only (traditional transit and BRT), and P&R.
The preliminary numerical results based on our initial OD demand estimates with limited survey data are listed in Table 4. It can be seen that if all agents travel by driving-only mode, the average travel time is 74.9 min, and only 23 % of travelers can reach their accessibility goal. If BRT lines are built, the travel time can be reduced to 59.1 min, and the overall accessibility ratio will increase to 47 % significantly. When 5 parking lots are built, the transit and BRT lines can take more than 60 % passengers, and the average travel time can be dramatically reduced to 19.2 min, and the tour-level or agent-based accessibility ratio will then approximately increase to 83 %. As a result, optimized P&R location and capacity allocation and BRT facilities are extremely helpful in terms of increasing visitors’ space–time accessibility goals. It should be remarked that, if more parking lots (6 or more) are built for additional locations, the overall accessibility could not be further improved significantly based on our simulation results.
5 Conclusions
In an intermodal traffic network, travelers’ accessibility measure highly depends on the traffic flow condition, park-and-ride facility, and transit schedule. This paper describes a space–time representation of an intermodal traffic network. It also integrates traffic flow, transit schedule, and park-and-ride facility to establish a linear integer programing network design model to maximize the tourist’s accessibility to a mega event within a multi-modal network. A Lagrangian relaxation and decomposition solution approach is developed to efficiently solve this problem. The numerical results show that building parking lots at proper locations with an optimized parking space capacity could be useful in terms of allowing more intermodal transfers, reduce individual’s travel time, and improve the special event visitors’ accessibility. In practice, the mega-event park-and-ride lots planning problem should be integrated with long-term transit development planning decisions to fully utilize/balance the potentially unused capacity of the facilities. Future research will also focus on algorithm enhancements, OD demand calibration/validation, as well as valuating potential applications with other network design models.
References
Bovy P (2003) Mega sports event transportation and main mobility management issues. In: Transport and exceptional public events. Report of the one hundred and twenty second round table on transport economics
Spillar RJ (1997) Park-and-ride planning and design guidelines. Parsons Brinckerhoff Incorporated, New York
Currie G, Shalaby A (2012) Synthesis of transport planning approaches for the world’s largest events. Transp Rev 32(1):113–136
Gao Z, Qu Y, Li X, Long J, Huang HJ (2014) Simulating the dynamic escape process in large public places. Oper Res 62(6):1344–1357
Latoski SP, Dunn Jr, WM, Wagenblast B, Randall J, Walker MD (2003) Managing travel for planned special events (No. FHWA-OP-04-010)
Bovy HPPH (2007) Transport and mobility management challenges for the world largest mega-event: 1992 to 2012 Summer Olympic Games. Paper submitted to the UC Berkeley Institute of Transportation Studies, Berkeley, 7, 2007
Meek S, Ison S, Enoch Marcus (2008) Role of bus-based park and ride in the UK: a temporal and evaluative review. Transp Rev 28(6):781–803
Shoup DC (2005) The high cost of free parking, vol 7. Planners Press, American Planning Association, Washington, DC
Arnott R, Rowse J (1999) Modeling parking. J Urban Econ 45(1):97–124
Verhoef E, Nijkamp P, Rietveld P (1995) The economics of regulatory parking policies: the (im) possibilities of parking policies in traffic regulation. Transp Res Part A 29(2):141–156
Fosgerau M, De Palma A (2013) The dynamics of urban traffic congestion and the price of parking. J Public Econ 105:106–115
Liu W, Yang H, Yin Y (2014) Expirable parking reservations for managing morning commute with parking space constraints. Transp Res Part C 44:185–201
He F, Yin Y, Chen Z et al (2015) Pricing of parking games with atomic players. Transp Res Part B 73:1–12
Qian ZS, Rajagopal R (2014) Optimal dynamic parking pricing for morning commute considering expected cruising time. Transp Res Part C 48:468–490
Guo W, Zhang Y, Xu M et al (2016) Parking spaces repurchase strategy design via simulation optimization. J Intell Transp Syst 20(3):255–269
Zheng N, Geroliminis N (2016) Modeling and optimization of multimodal urban networks with limited parking and dynamic pricing. Transp Res Part B 83:36–58
Viswanath K, Peeta S (1857) Multicommodity maximal covering network design problem for planning critical routes for earthquake response. Transp Res Rec 2003:1–10
Szeto WY, Jiang Y, Wang DZW, Sumalee A (2015) A sustainable road network design problem with land use transportation interaction over time. Netw Spat Econ 15(3):791–822
Cipriani E, Gori S, Petrelli M (2012) Transit network design: a procedure and an application to a large urban area. Transp Res Part C 20(1):3–14
Brands T, van Berkum EC (2014) Performance of a genetic algorithm for solving the multi-objective, multimodal transportation network design problem. Int J Transp 2(1):1–20
Contrerasa I, Fernández E (2012) General network design: a unified view of combined location and network design problems. Eur J Oper Res 219(3):680–697
Miandoabchi E, Daneshzand F, Farahani RZ, Szeto WY (2015) Time-dependent discrete road network design with both tactical and strategic decisions. J Oper Res Soc 66:894–913
Wang JY, Yang H, Lindsey R (2004) Locating and pricing park-and-ride facilities in a linear monocentric city with deterministic mode choice. Transp Res Part B 38(8):709–731
Liu TL, Huang HJ, Yang H, Zhang X (2009) Continuum modeling of park-and-ride services in a linear monocentric city with deterministic mode choice. Transp Res Part B 43(6):692–707
Wang H, Meng Q, Zhang XN (2014) Park-and-ride network equilibrium with heterogeneous commuters and parking space constraint. Transp Res Rec 2466:87–97
Fan W, Khan MB, Ma J et al (2013) Bilevel programming model for locating park-and-ride facilities. J Urban Plan Dev 140(3):04014007
Lai X, Schonfeld P (2016) Concurrent optimization of rail transit alignments and station locations. Urban Rail Transit 2(1):1–15
Abdelghany K, Mahmassani H (2001) Dynamic trip assignment-simulation model for intermodal transportation networks. Transp Res Rec 1771:52–60
Abdelghany KF, Mahmassani HS, Abdelghany AF (2007) A modeling framework for bus rapid transit operations evaluation and service planning. Transp Plan Technol 30(6):571–591
Chang E, Floros E, Ziliaskopoulos A (2007) An intermodal time-dependent minimum cost path algorithm. Dynamic fleet management. Springer, Berlin, pp 113–132
Zhang K, Mahmassani H, Chung-Cheng L (2008) Probit-based time-dependent stochastic user equilibrium traffic assignment model. Transp Res Rec 2085:86–94
Zhou X, Mahmassani HS, Zhang K (2008) Dynamic micro-assignment modeling approach for integrated multimodal urban corridor management. Transp Res Part C 16(2):167–186
Mishra S, Welch TF, Torrens PM et al (2015) A tool for measuring and visualizing connectivity of transit stop, route and transfer center in a multimodal transportation network. Public Transp 7(1):77–99
Mahmassani H, Zhang K, Dong J et al (2007) Dynamic network simulation-assignment platform for multiproduct intermodal freight transportation analysis. Transp Res Rec 2032:9–16
Oliveros MM, Nagel K (2011) Automatic calibration of microscopic, activity based demand for a public transit line, Annual Meeting Preprint, pp 12–3279
Rieser M (2010) Adding transit to an agent-based transportation simulation. Swiss Federal Institute of Technology, Zürich
Pekel E, Kara SS (2015) A simulation based scheduling in bus rapid transit system. Sigma J Eng Nat Sci 33(1):66–76
Yu L, Yu L, Chen X et al (2006) Calibration of VISSIM for bus rapid transit systems in Beijing using GPS data. J Public Transp 9(3):13
Maciejewski M, Nagel K (2011) Towards multi-agent simulation of the dynamic vehicle routing problem in MATSim, parallel processing and applied mathematics. Springer, Berlin, pp 551–560
Zhou X, Taylor J (2014) DTALite: a queue-based mesoscopic traffic simulator for fast model evaluation and calibration. Cogent Eng 1(1):961345
Zawack DJ, Thompson GL (1987) A dynamic space–time network flow model for city traffic congestion. Transp Sci 21(3):153–162
Miller HJ (1991) Modelling accessibility using space–time prism concepts within geographical information systems. Int J Geogr Inf Syst 5(3):287–301
Miller HJ (1999) Measuring space–time accessibility benefits within transportation networks: basic theory and computational procedures. Geogr Anal 31(1):1–26
Handy SL (2005) Planning for accessibility: in theory and in practice. In: Levinson DM, Krizek KJ (eds) Access to destinations. Elsevier, Amsterdam, p 131–147
Santos B, Antunes A, Miller EJ (2011) Integrating equity objectives in a road network design model. Transportation Research Record: Journal of the Transportation Research Board, 2089, 2008. Litman, T. Evaluating accessibility for transportation planning. Victoria Transport Policy Institute, Victoria, pp 35–42
Kang JE, Chow JYJ, Recker WW (2013) On activity-based network design problems. Transp Res Part B 57:398–418
Shah N, Kumar S, Bastani K, Yen I-L (2008) A space–time network optimization model for traffic coordination and its evaluation, sensor networks, Ubiquitous and trustworthy computing, pp 177–184
Zhang J, Jia L, Niu S, Zhang F, Tong L, Zhou X (2015) A space–time network-based modeling framework for dynamic unmanned aerial vehicle routing in traffic incident monitoring applications. Sensors 15:13874–13898
Tong L, Zhou X, Miller HJ (2015) Transportation network design for maximizing space–time accessibility. Transp Res Part B 81:555–576
Mahmoudi M, Zhou X (2016) Finding optimal solutions for vehicle routing problem with pickup and delivery services with time windows: a dynamic programming approach based on state–space–time network representations. Transp Res Part B 89:19–42
Acknowledgments
The research reported here was partially sponsored by Beijing Institute of City Planning. The last three authors are partially supported by National Science Foundation under grant No. CMMI-1538569 “Improving Spatial Observability of Dynamic Traffic Systems through Active Mobile Sensor Networks and Crowdsourced Data”. We would like to thank Lu Tong and Dr. Harvey Miller for sharing their research papers and algorithms with us. Conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the official views or policies of the above organizations, nor do the contents constitute a standard, specification, or regulation of these organizations.
Open Access
This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Author information
Authors and Affiliations
Corresponding author
Additional information
Editor: Baoming Han
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ruan, JM., Liu, B., Wei, H. et al. How Many and Where to Locate Parking Lots? A Space–time Accessibility-Maximization Modeling Framework for Special Event Traffic Management. Urban Rail Transit 2, 59–70 (2016). https://doi.org/10.1007/s40864-016-0038-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40864-016-0038-9