
Abstract
The need for alternative cooling technologies aside from compressor based cooling is growing since more and more refrigerants get regulated. One promising technology is cooling with the elastocaloric effect by using a phase change of elastocaloric materials that induces a temperature change within the material. The crucial point in the commercialization of this technology is the efficiency of the elastocaloric system including elastocaloric material and the drivetrain. Literature often gives values for the efficiency without including the actuator that drives the system although this is necessary to determine the overall total efficiency. In this study, we introduce a highly efficient drive system based on energy recuperation and deduce the efficiency of this concept. The actuator drive consists of an oscillating armature and is driven by reluctance forces. For the characterization of the system, the elastocaloric material is exchanged with preloaded springs. This gives rise to the possibility of measuring the efficiency of the actuator system itself without considering the elastocaloric material. The efficiency of the drive system is determined to be \({\eta }_{\text{A}}=95.7 \%\).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The primary reason for the development of (elasto)caloric heat pumps or cooling systems is to offer an efficient and eco-friendly possibility for the heat transfer in processes or the cooling in buildings. In comparison to common cooling systems based on compressors and therefore based on the use of harmful refrigerants like fluorinated hydrocarbons, the use of elastocaloric heat pumps is significantly more environmentally friendly. This is due to the fact that special solid state materials—for example nickel titanium or copper aluminum based alloys—are used to generate the required temperature difference by using the elastocaloric effect [1, 2]. On another note, the fluids used in compressor based systems get regulated more and more due to their harmfulness to the environment but also, oftentimes the fluids are inflammable, toxic or have to be operated under large pressures [3]. In elastocaloric systems, oftentimes water is used as a heat transport fluid which makes solid state cooling a promising alternative to standard compressor systems [4]. A crucial point is the efficiency of the elastocaloric material but also of the elastocaloric system including the drive system. Whereas oftentimes the efficiency of the material itself and the periphery like the hydraulic pumps used for the pumping of the fluid is included, the efficiency of the actuator is neglected. However, for the commercialization of this technology, the overall efficiency of the system is essential.
The (elasto)caloric effect is reversible and allows the realization of a Carnot cycle (see Fig. 1). During one elastocaloric cycle, a load is applied to the elastocaloric material which increases its initial temperature \({T}_{0}\) by \(\Delta T\). If the material exchanges heat with its surroundings while the load is still applied, the temperature decreases to \({T}_{0}\) again. After removing the load, the material temperature decreases by \({T}_{0}-\Delta T\). If heat is supplied to the material by heat exchange the temperature reaches its initial point \({T}_{0}\) again. By cycling, this effect can be used in elastocaloric cooling systems or heat pumps. In a direct comparison with electro- and magnetocalorics, elastocaloric materials show a particularly large temperature span up to \(\pm 20 \text{K}\) [5,6,7,8] and a broad operating point with up to \(50 \text{K}\) [9].

Elastocaloric cooling cycle. If a mechanical force field F is applied to the elastocaloric material, the temperature of the material increases by ΔT regarding its initial temperature T0. By exchanging heat with the surrounding, the material cools down to T0. If the force field is removed, the temperature of the material decreases below its initial point T = T0 + ΔT. If heat is supplied to the material, the material regains its initial temperature T0 again. The effect is reversible. If this effect is repeated in a cyclical manner, the elastocaloric effect can be used to pump heat, as for example in an elastocaloric heat pump or an elastocaloric cooling system
In general, elastocaloric systems are divided into tensile load-based and compressive load-based systems. Up until now, elastocaloric systems were often operated by tensile loads as for example known systems by Tusek et al. [10], Dall’Olio et al. [11], and Brüderlin et al. [12, 13]. It was shown by Kabiri et al. and Hou et al. that bulk material cycled by compressive load shows a smaller degradation and therefore shows a larger long-term stability [14, 15]. A system by Bachmann et al. was operated for more than \({10}^{7}\) cycles by using compressive loads [16]. Although the lesser degradation is a huge advantage, the geometry of the material has to be adapted for buckling and bulging. This leads to an unfavorable load–displacement ratio. For the elastocaloric effect to arise, extremely high loads of several kN have to be applied to the material [17]. In addition to the challenge of large loads in compressive systems, the actuator must enable very high energy efficiency, and this is only possible with efficient energy recuperation.
In this research study, a drive concept based on magnetic reluctance excitation for elastocaloric heat pumps and cooling systems is presented, characterized, and evaluated in particular regarding its energy efficiency. The driving system is an oscillating armature which relies on electromagnetic oscillation [18]. These drives can for instance be found in electric razors [19]. Oscillating armatures consist of the following components: A movable iron core, called armature and a fixed iron yoke with excitation coils. The armature is fixed in its position by springs. By driving the oscillating armature with an alternating current, the armature is pulled out of its initial position in one direction. The extent depends on the current. By constantly switching the current direction, the armature oscillates. By driving the oscillating armature at its resonance frequency, these drives are highly efficient.
It has to be noted that in this research study we introduce a novel drive system on the basis of which energy-efficient, low maintenance and quiet drives can be built for elastocaloric cooling systems.
State of the Art
A general review of driving systems for elastocaloric cooling can be found in [15, 20].
In general, regarding tensile loaded systems, there are two different possibilities for the driving: linear actuators with spindle motors (Schmidt et al. [21], Tusek et al. [10], Snodgrass et al. [22]) or rotary drivers using a cam disc (Kirsch et al. [23]).
As of now, compressive load based elastocaloric systems used hydraulic and crankshaft actuator wherein levers are used to shift the disadvantageous force–displacement ratio.
-
In hydraulic based systems, the lever ratio corresponds to the area ratio in the cylinder. The first to characterize an elastocaloric heat pump including the drive system based on this type of systems were Qian et al. [24,25,26].
-
Crankshaft actuators give rise to the possibility to shift the force–displacement ratio. This approach was used in the system by Bachmann et al. [16]. In this study, the actuator was not introduced further.
The great disadvantages regarding the efficiency in using classical hydraulic systems for elastocaloric systems are the following: on the one hand, a second fluid circuit is introduced for the oil circulation and on the other hand, losses occur due to cross flow or leakage current caused by pulsations at the control pistons. In addition, losses due to friction in the hydraulic fluid and friction at the hydraulic components supervene.
Conceptually, in crankshaft actuators, rolling bearings are employed in the connecting rod and the bearing block. In continuous operation, rolling bearings need an active lubricant management. As a consequence of the large bearing load, it is only possible to use special grease for high loads or perform oil changes regularly. All in all, friction losses are significantly large and, with the use of lubricants, maintenance and, ultimately, operation is anything but clean.
Besides, there are several approaches to use thermally operated actuators consisting of shape memory alloys in elastocaloric systems [27]. But with these approaches, only small total efficiencies are possible. In literature, the calculation of the efficiency including the efficiency of the actuator is not common and is neglected in many research studies since the main focus in most studies is the usage of the caloric effect and the heat transfer. In terms of electrocaloric cooling systems, Mönch et al. showed a drive concept including energy recovery with a total efficiency of more than 99% [28, 29]. To drive an elastocaloric system with high efficiency, the efficiency of the actuator as well as energy recuperation is of great importance. Issues like system complexity, maintenance-freedom, low noise, the cleanliness regarding lubricants or hydraulic fluids and the minimization potential to minimize play an important role for the commercialization of these systems.
Theoretical Background
Resonator
The drive concept that is shown in this research study is based on a non-contact mechanically excitated spring-mass-oscillator. The classical springs are replaced by elastocaloric elements. With these oscillators operated in resonance mode, it is possible to store the elastic potential energy temporally inside the oscillating circuit. In doing so, the energy fluctuates cyclically between potential and kinetic energy which means that the energy ideally does not have to be supplied from the outside. Figure 2 shows the schematical set up of a compressive load-based spring-mass-oscillator. The here shown antagonistic double spring oscillator consists of a mass \(m\) and two elastocaloric (EC) elements. One EC segment pair consists of two clamped EC elements. One segment is preloaded with 50% of its total strain \(\widehat{\varepsilon }\), \(\varepsilon = \widehat{\varepsilon }/2\). If the mass is fully displaced, one of the EC elements reaches its maximum compressive load \(\widehat{\varepsilon }\). At the same time, the compressive load on the opposite side of the EC segment is zero. Therefore, the EC element is fully unloaded. The clamping of two EC elements has the following advantages:
-
1.
The system has a defined zero position and raises the energy for the retraction at the displacement by itself.
-
2.
Since the drive system works antagonistically, energy recuperation takes place. The load of one segment is supported through the unloading of the other segment.
-
3.
The segment pairs are arbitrarily scalable. This concept allows to build muti stage systems with only one oscillator.

Elastocaloric material in double spring system. One EC segment consists of two elastocaloric elements that work as a spring (top image). The EC material is pre-clamped with half of its maximal strain (middle image). If one side of the segment is fully deflected, the other side is fully unloaded (bottom image)
Figure 3 shows the schematic system set up of the derived oscillating armature concept for an elastocaloric system. In total, four segments that are connected in series are alternatingly loaded and unloaded. In detail, the drive consists of a concentrically mounted double oscillating armature. The oscillating armature (2) is displaced via the reluctance drives (1). By operating the oscillating armature at its resonance frequency, the spent potential energy is recuperated by converting the potential into kinetic energy. This stores the energy in the system. By varying the mass moment of inertia and/or Young’s modulus, the resonance frequency can be adjusted resp. shifted in the desired operating range. The resonance frequency is influenced by the attenuation as well. A larger attenuation means that the quality factor gets smaller. This results in the possibility to control the power of the heat pump by varying the working frequency to a certain degree. The attenuation consists of the thermal work that is put into the elastocaloric segments in addition to the losses due to the driving system. This is shown schematically in Fig. 4a in which a typical stress–strain-curve of elastocaloric material is shown [30]. Even in an ideal elastocaloric material, the elastocaloric work that rises due to work at the material itself (Carnot work) is never zero. Therefore, the orange area in Fig. 4a is non-neglectable and the elastocaloric elements are strictly spoken parts of the drive system as well. To determine the efficiency of solely the drive system, the elastocaloric material is interchanged with a spring with a spring efficiency of \({\eta }_{\text{S}}\approx 1\). This vanishes the losses due to the thermal work of the EC material (see Fig. 4b)) and during the measurements, only the losses in the drive system (green area) are considered. This leaves a drive system consisting of a spring-mass-oscillator and an excitator. Due to the contactless excitation of the spring-mass-oscillator and due to the fact that no rolling bearings are used all of the mechanical drive losses can be led back to the friction losses in the mounting (Fig. 3, (1)). Figure 5 shows the circuit diagram of the driving system. The system is excited by an alternating current. Power diodes assume the task of the power allocation since the coils inside one coil pair have to work inversely.

Schematic set up of the drive system. The drive system consists of two reluctance drives that each contain two coil pairs. In this schematic, two elastocaloric segments are shown which each contain two elastocaloric elements/return springs (3). (1) represents the mounting for the (2) oscillating armature. The EC elements/springs are preloaded with half of the maximal load

a Characteristic stress–strain curve with regard to the mechanical drive losses. The work that is used in the elastocaloric material appears even for a material with an efficiency of 100%. This reduces the overall efficiency of the system. For the characterization of this driving system, it is therefore refrained to characterize the oscillating armature with elastocaloric material. The material is exchanged with springs. b Force–displacement graph of the drive system without elastocaloric material. The only losses that decrease the system efficiency are the drive losses

Circuit diagram of the reluctance drive system. The power for the armature is supplied via an alternating current source. This allows the variation of the frequency as well as a constant current. The reluctance drive is designed as a magnetic double circuit and transfers the driving force via the oscillating armatures to the elastocaloric material. Both driver circuits are inversely excited via power diodes
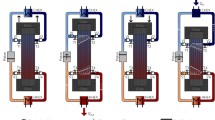
In Magnetostatics, the reluctance resp. the inductance plays a higher role than the polarity of the field. The vector of the reluctance therefore always points in the same direction. Rephrased, this means that there are no repelling reluctance forces. With this background in mind, each reluctance drive needs a pair of coils. One cycle of the drive system is drawn in Fig. 6. The figure shows the position of the oscillating armature (represented by a red rectangle) at different timesteps. Both magnetic circuits define the final position, whereas the elastocaloric material defines the initial position. At the time \({t}_{0}\), no current is flowing through the coils and the oscillating armature is in its initial position (Fig. 6a). At \({t}_{1}\), coil 1 resp. coil 3 are energized. The oscillating armature is pulled into the gap and closes the magnetic circuit (Fig. 6b). Time step \({t}_{2}\) shows the coil pair without energization once more. The elastocaloric resp. spring elements take over the return of the oscillating armature into its initial position (Fig. 6c). At \({t}_{3}\), coil 2 resp. coil 4 are energized. The oscillating armature is deflected to the right side and closes the magnetic circuit (Fig. 6d). Then, the oscillating armature returns to its initial position which completes one cycle. In total, each elastocaloric element is transformed fully from the austenite to the martensite phase and back transformed again. The graphs beneath the schematics in Fig. 6 show the voltage amplitude of the oscillating armature at the respective time step. The maximum absolute amplitude of the voltage is reached if the oscillating armature is fully deflected, and the magnetic circuit is closed.

Reluctance actuator at different time steps. The red rectangle represents the oscillating armature. The graphs below the schematics show the amplitude of the voltage at the different time steps. a The oscillating armature is in its initial position at time step t0., b At t1, coil 1 resp. coil 2 on the opposite side of the system is energized, meaning that the oscillating armature is pulled into the air gap of the reluctance drive and closes the magnetic circuit. This leads to an increase in voltage in coil 1 and coil 2. c At t2, no current is applied at the system which means that the springs resp. the elastocaloric material pulls the armature back into its initial position. d At t3, the current direction is switched meaning that coil 3 and coil 4 are now energized, resulting in a pull of the armature to close the magnetic circuit. This leads to an increase in the amplitude of the voltage in coil 3 and coil 4
Determination of the Efficiency
The system efficiency of an elastocaloric system \({\eta }_{\text{ES}}\) is the product of the efficiency of the drive system \({\eta }_{\text{A}}\) and the efficiency of the elastocaloric unit \({\eta }_{\text{Cal}}\)
The efficiency of the drive system is the product of the electrical \({\eta }_{\text{elec}}\) and mechanical \({\eta }_{\text{mech}}\) efficiency
wherein \({\eta }_{\text{elec}}={P}_{\text{mech}}/{P}_{\text{real}}\). \({P}_{\text{mech}}\) represents the mechanical power and \({P}_{\text{real}}\) represents the real resp. active power. The active power corresponds to the real part of the apparent power \(\underline{S}\):
The complex apparent power is defined as the product of the complex voltage \(\underline{U}\) and the complex conjugate current \(\underset{\_}{{I}^{*}}\)
The essential part of calculations concerning complex numbers is the definition of complex amplitudes. The complex voltage resp. current can be written as
with the RMS notation and by using complex amplitudes \(\widehat{u}\) and \(\widehat{i}\) and the phase shift angle \(\Delta \varphi\)
wherein the index indicates the phase angle of the voltage resp. the current. This results in a real electrical power of
The mechanical power is generated directly via the reluctance force. This quantity cannot be measured directly but can be derived from energy conservation via
wherein \({P}_{\text{l},\text{elec}}\) represent the electrical losses in the electrical components, meaning the losses in the coils \({P}_{\text{l},\text{ coil}}\) and diodes \({P}_{\text{l},\text{diode}}\) as well as in the magnetic circuit \({P}_{\text{l},\text{ferro}}\)
The coil losses can be reduced to the resistive losses in the windings. To determine the ohmic losses, the DC resistance of the coils \({R}_{\text{DC}}\) has to be measured and multiplied with the squared active current \(\mathbf{R}\mathbf{e}\left(\underline{I}\right)\)
The losses arising from the diode are diffusion losses at the pn-juncture of the semi-conductor. They originate due to an electrical opposing field in the depletion region. The losses increase with an increasing current. The diffusion voltage \({U}_{\text{D}}\) can be determined with the diode characteristic. For Silicon diodes, the built-in potential is \({U}_{\text{D}}\left(I=0 \text{A}\right)=0.7 \text{V}\) [31]. The losses inside of the diode can be determined to
The losses due to the magnetic circuit arise in each circuit at the resetting. They are frequency dependent and therefore, in general, relevant. The losses are parted in hysteresis losses which occur due to the work at the Weiss domains and eddy currents. Nevertheless, by using a frequency adapted layer structure of the yoke with an electrical steel and by using an alloy with a low magnetization hysteresis, this kind of loss shows no significant value and is therefore neglected in this study.
The electrical losses can be summarized to
The usable power \({P}_{\text{use}}\) is the mechanical power occurring to the elastocaloric unit. With a known spring stiffness \({k}_{\text{sys}}\), the usable power can be determined directly in dependence of the frequency \(f\) with the amplitude response of the measured displacement \(\widehat{s}\)
Inside one of the electrocaloric segments, the springs are oriented in a parallel series from which two segments are connected in parallel as well. The spring stiffnesses \({k}_{i}\) inside of the parallel circuits are summed up to
With this in mind, the total mechanical losses can be derived to
by using energy conservation laws. The mechanical losses arise due to friction. Since the excitation occurs without contact, there are no friction losses at the excitation itself. Due to the double antagonistic set up, the load directions compensate which results in a self-alignment of the system. Therefore, no roller bearings are needed. These special features of the actuator concept are essential characteristics and the prerequisite for the low-friction actuator concept. The inner friction which is needed for the determination of the used rebound springs is assumed to be negligible. The friction losses can be attributed to the mounting.
To summarize, the efficiency of the actuator \({\eta }_{\text{A}}\) is calculated via
Figure 7 shows the relationship of the dependent power quantities for the whole system. The electrical real power as an input quantity and the mechanical used power as an output quantity can be measured. The electrical losses can be determined likewise. The mechanical driving power as well as the mechanical losses cannot be measured directly. Nevertheless, they can be determined via energy conservation laws as shown beforehand.

Schematic illustration of the relationships of all derived power quantities
Methods
Set Up
The total demonstrator set up is shown in Fig. 8. Each reluctance drive consists of a double U setting of pure iron. The iron yokes are wrapped with two coils. Each of the four coils consists of 1832 windings with a coil current of 4 A and a wire length of 461 m. The saturation flux density inside the air gap of the reluctance drive is 1.6 T. The air gap on both sides (indicated by the green rectangles) has a width of 5 mm. The system is driven with an AC power supply (ET Instrumente EAQ-1000-USB). A total of eight springs (resp. elastocaloric elements, as indicated by the red rectangles) are used in this set up (Gutekunst Federn D-288X-02). The lever ratio of this set up is 1:20. The springs are mounted in a distance of 14.5 cm from the suspension point. For system measurements, the ECM would be mounted in a distance of 2 cm from the suspension point.

Total set up of the reluctance drive. As described before, each side contains four coils (two antagonistic pairs). The oscillating armature is mounted in the center. Each side contains two elastocaloric segment pairs. For the measurement of the actuator efficiency, we exchanged the ECM with springs. The position of the springs are indicated by the red rectangle. The green rectangles indicate the air gaps of the reluctance drives
Characterization Measurements
The voltage that drops at the drive system was measured to characterize the elastocaloric actuator. Simultaneously, the current is determined with a known precision shunt. During the measurements, a predefined voltage is set at the power supply that stays constant during all the measurements leading to a varying current—depending on the frequency. The equivalent circuit diagram for the measurements is shown in Fig. 9. In general, the phase shift angle between the current and the voltage is frequency dependent and changes severely near the resonance. In this case, the resonance behavior of a mechanical spring-mass-oscillator is studied rather than an electro-magnetic resonant circuit. The resonance frequency of the reluctance excitator is several quantities larger than the mechanical resonance frequency. Since only frequencies between 1 and 30 Hz are applied at the AC power supply, the phase shift angle is assumed to be constant over this frequency range.

Equivalent circuit diagram of the measurement set up for the characterization of the actuator drive system
The mechanical amplitude resp. the mechanical displacement of the oscillating armature is measured in dependence of the electrical excitation. For the measurement of the displacement, a precision measuring sensor (TESA GT21 DC) is mounted at the position at which the elastocaloric elements are to be mounted in the elastocaloric system (see Fig. 10).

Set up for the measurement of the amplitude response. A precision measuring sensor determines the amplitude response of the oscillating armature. The sensors are mounted near the position where the ECM would be positioned. For the efficiency measurement, the ECM is exchanged with springs. This is shown in greater detail in the right image
Results and Discussion
Determination of the Real Power
The real power of the system is determined with Eq. (8). For the calculation, the maximum amplitudes of the current \(\widehat{i}\) and the maximum amplitude of the voltage \(\widehat{u}\) are needed as well as the phase shift angle \(\Delta \varphi\).
Figure 11 shows the measured time evolution of current and voltage. The maximum amplitudes of each can be determined directly from the graph. The phase shift angle is calculated via
wherein \(\omega\) represents the angular frequency and \(T\) represents the period. As stated earlier, the phase shift angle is assumed to be constant over the measured frequency range. The timespan between current and voltage is determined to \(\Delta t=11.5\) ms with a cycle duration of \(T=54.5\) ms, resulting in a phase shift angle of \(\Delta {\varphi }^{\text{rad}}=1.324\) resp. \(\Delta {\varphi }^{^\circ }=75.9\) °. With the help of Eq. (8), the real power in dependence of the frequency is calculated and shown in Fig. 12. It can be seen that for larger frequencies, the real power decreases. Since the voltage stays constant during the measurement, this means that for larger frequencies the current decreases.

Time difference Δt between the current and the voltage characteristic. The x-axis depicts the time, whereas the y-axis depicts the measured voltage resp. the measured current

Electrical power input. The x-axis shows the frequency, whereas the y-axis shows the real power. For larger frequencies, the real power of the drive system decreases
Determination of the Usable Power
The usable power can be directly determined from the maximum displacement of the measuring sensors \(\widehat{s}(f)\) by considering the leverage ratio and the spring stiffness of the system. For this, the amplitude response in dependence of the frequency is measured with the precision sensor (see Fig. 13). The amplitude decreases with increasing frequency, although a resonance peak can be found at \({f}_{R}=18.8\) Hz. At the resonance frequency, the spring energy is stored in the resonant circuit and does not have to be supplied by the excitator. This results in a drastic increase in the amplitude of the oscillating armature in a narrow frequency bandwidth. It has to be noted that the position sensors are mounted at the position of the ECM and not the position of the springs. Therefore, the springs show a larger displacement than measured by the position sensors.

Measured amplitude response of the drive system. The amplitude is drawn against the frequency. A resonance peak occurs at a frequency of fR = 18.8 Hz
For the calculating of the effective usable power, the total spring stiffness is determined with the spring stiffness of the individual springs \(k=58\) N/mm. By using Eq. (15), this results in a total spring stiffness of \({k}_{\text{sys}}=232\) N/mm. The usable power is determined via Eq. (14). The result can be seen in Fig. 14 where the usable power is drawn against the frequency. Due to the proportionality between the usable power and the frequency, the usable power shows a maximum at the resonance frequency.

Mechanical usable power drawn against the frequency
Determination of the Electrical Losses
The electrical losses are determined with Eq. (13). Figure 15 shows the losses of the diode, the coils and the resulting total electrical losses. The ohmic resistance of the coils is determined to be \({R}_{\text{DC}}={R}_{1}+{R}_{2}={R}_{3}+{R}_{4}=2*5.4\Omega =10.8\Omega\). In general, the losses increase with a decreasing frequency. The frequency behavior of the losses follows the behavior of the real power.

Electrical losses drawn against the frequency. The total electrical losses consist of the losses inside of the coils, the losses due to the diode and the losses due to the magnetic circuit
Determination of the Efficiency
By using the determined power quantities, the efficiencies can be directly calculated with Eq. (17). By drawing them against the frequency (see Fig. 16), it can be seen that the actuator system has its maximum efficiency at the resonance frequency. The electrical efficiency slightly increases for larger frequencies, whereas the mechanical and the actuator efficiency show the same behavior as the amplitude and the usable power. The individual results for the efficiency at the resonance frequency can be summarized to

Efficiency versus the frequency. The green data points represent the total efficiency of the actuator system, whereas the gray data points represent the electrical efficiency and the blue data points represent the mechanical efficiency. In resonance, the maximum efficiency of the actuator system is ηA (f = 18.8 Hz) = 95.7%
The results show the importance of the operation of the oscillating armature at its resonance frequency. By operating the system outside of this frequency range, the spring energy can only be held constant if additional potential energy is supplied to the system. This additional energy supply makes the actuator inefficient. Conceptually, energy recuperation is only possible at the resonance frequency of the system. The width of the peak is dependent on the damping factor of the elastocaloric material resp. the used springs.
By using literature values from Schipper et al. [32] for the efficiency of typical elastocaloric materials in an ideal active regenerator and in an ideal cascaded system, the efficiency of the actuator system including the elastocaloric material is calculated via Eq. (1). The results are summarized in Table 1. Although the actuator efficiency is larger than 95%, the efficiency of an ideal elastocaloric cooling system severely decreases due to the material efficiency. It must be said that shape memory alloys/elastocaloric materials have a rather short history of the sole development for cooling systems and were previously often used and optimized for actuating purposes. With more research concerning elastocaloric cooling, new materials will be developed and optimized for the usage in such. Nevertheless, the results show a larger system efficiency in the active regenerator approach than in the cascaded systems. In comparison to the work of Mönch et al. in regard to the efficiency of a drive system for electrocalorics [28, 29], this work shows a slightly smaller overall efficiency. To compete with compressor based systems, it is important to achieve these large efficiencies for the actuator system.
As previously stated, oscillating armatures are operated at their resonating frequencies which are dependent on the mass moment of inertia of the armature and of Young’s modulus of the elastocaloric material. Due to the large stiffness of the material, the resonance frequency of the material is in the double-digit range. To drive the process in this frequency range, the heat transfer rate has to be sufficiently large enough. This can, e.g., be achieved by using the active elastocaloric heat pipe approach as introduced in [16].
Conclusion
The goal of this research study was the development and analysis of a highly efficient elastocaloric drive system. The characterization of the actuator system consisted of measuring different power quantities to determine the efficiency of the system without considering the interacting with the elastocaloric material. This was achieved by exchanging the EC elements with preloaded springs. By measuring frequencies between 1 and 30 Hz, the power quantities of the system were measured. During the measurements, a resonance peak was found at \({f}_{\text{R}}=18.8\) Hz. At this frequency, the actuator has its highest efficiency of \({\eta }_{\text{A}}\left(f=18.8 \text{Hz}\right)=95.7 \%\).
At the current developmental level, the actuator system allows the highly efficient drive of elastocaloric heat pumps and cooling systems in the double-digit frequency range. For the commercialization of the drive system, the actuator has to be downsized. In future work, this can be realized by for instance using additional spring elements connected in series to the elastocaloric material. This reduces the total spring stiffness of the system and therefore the resonance frequency. The spring work is stored inside the system and only has to be supplied at the transient oscillations. In general, it can be said that in future work it is important to focus the attention on the tuning of the resonance frequency.
Data availability
Data sets generated during the current study are available from the corresponding author on reasonable request.
References
Bonnot E, Romero R, Mañosa L et al (2008) Elastocaloric effect associated with the martensitic transition in shape-memory alloys. Phys Rev Lett 100:125901. https://doi.org/10.1103/PhysRevLett.100.125901
Tušek J, Engelbrecht K, Mikkelsen LP et al (2015) Elastocaloric effect of Ni-Ti wire for application in a cooling device. J Appl Phys 117:124901. https://doi.org/10.1063/1.4913878
Umweltbundesamt (2022) Fluorinated greenhouse gases and fully halogenated CFCs. https://www.umweltbundesamt.de/en/topics/climate-energy/fluorinated-greenhouse-gases-fully-halogenated-cfcs. Accessed 10 Dec 2023
Engelbrecht K (2019) Future prospects for elastocaloric devices. J Phys D: Appl Phys 1:21001. https://doi.org/10.1088/2515-7655/ab1573
Miyazaki S, Imai T, Igo Y et al (1986) Effect of cyclic deformation on the pseudoelasticity characteristics of Ti-Ni alloys. MTA 17:115–120. https://doi.org/10.1007/BF02644447
Miyazaki S, Otsuka K (1989) Development of shape memory alloys. ISIJ Int 29:353–377. https://doi.org/10.2355/isijinternational.29.353
Zarnetta R, Takahashi R, Young ML et al (2010) Identification of quaternary shape memory alloys with near-zero thermal hysteresis and unprecedented functional stability. Adv Funct Mater 20:1917–1923. https://doi.org/10.1002/adfm.200902336
Song Y, Chen X, Dabade V et al (2013) Enhanced reversibility and unusual microstructure of a phase-transforming material. Nature 502:85–88. https://doi.org/10.1038/nature12532
Chluba C, Ossmer H, Zamponi C et al (2016) Ultra-low fatigue quaternary TiNi-based films for elastocaloric cooling. Shap Mem Superelasticity 2:95–103. https://doi.org/10.1007/s40830-016-0054-3
Tušek J, Engelbrecht K, Eriksen D et al (2016) A regenerative elastocaloric heat pump. Nat Energy 1:10. https://doi.org/10.1038/nenergy.2016.134
Ahčin Ž, Dall’Olio S, Žerovnik A et al (2022) High-performance cooling and heat pumping based on fatigue-resistant elastocaloric effect in compression. Joule. https://doi.org/10.1016/j.joule.2022.08.011
Bruederlin F, Ossmer H, Wendler F et al (2017) SMA foil-based elastocaloric cooling: from material behavior to device engineering. J Phys D: Appl Phys 50:424003. https://doi.org/10.1088/1361-6463/aa87a2
Bruederlin F, Bumke L, Chluba C et al (2018) Elastocaloric cooling on the miniature scale: a review on materials and device engineering. Energy Technol 6:1588–1604. https://doi.org/10.1002/ente.201800137
Hou H, Cui J, Qian S et al (2018) Overcoming fatigue through compression for advanced elastocaloric cooling. MRS Bull 43:285–290. https://doi.org/10.1557/mrs.2018.70
Kabirifar P, Žerovnik A, Ahčin Ž et al (2019) Elastocaloric cooling: state-of-the-art and future challenges in designing regenerative elastocaloric devices. SV-JME 65:615–630. https://doi.org/10.5545/sv-jme.2019.6369
Bachmann N, Fitger A, Maier LM et al (2021) Long-term stable compressive elastocaloric cooling system with latent heat transfer. Commun Phys 4:615. https://doi.org/10.1038/s42005-021-00697-y
Ahčin Ž, Tušek J (2023) Parametric analysis of fatigue-resistant elastocaloric regenerators: tensile vs. compressive loading. Appl Therm Eng 231:120996. https://doi.org/10.1016/j.applthermaleng.2023.120996
Häberle GD, Häberle HO (1990) Transformatoren und elektrische Maschinen: In: Anlagen der Energietechnik, 2., überarb. und erw. Aufl. Europa-Lehrmittel. Verl. Europa-Lehrmittel Nourney Vollmer, Haan-Gruiten
Timmerman J (1973) Two electromagnetic vibrators. Philips Tech Rev 249–259
Qian S, Geng Y, Wang Y et al (2016) A review of elastocaloric cooling: materials, cycles and system integrations. Int J Refrig 64:1–19. https://doi.org/10.1016/j.ijrefrig.2015.12.001
Schmidt M, Schuetze A, Seelecke S (2015) Scientific test setup for investigation of shape memory alloy based elastocaloric cooling processes. Int J Refrig 54:88–97. https://doi.org/10.1016/j.ijrefrig.2015.03.001
Snodgrass R, Erickson D (2019) A multistage elastocaloric refrigerator and heat pump with 28 K temperature span. Sci Rep 9:18532. https://doi.org/10.1038/s41598-019-54411-8
Kirsch S-M, Welsch F, Michaelis N et al (2018) NiTi-based elastocaloric cooling on the macroscale: from basic concepts to realization. Energy Technol 6:1567–1587. https://doi.org/10.1002/ente.201800152
Qian S, Catalini D, Muehlbauer J et al (2023) High-performance multimode elastocaloric cooling system. Science. https://doi.org/10.2172/1220817
Qian S, Geng Y, Wang Y et al (2016) Design of a hydraulically driven compressive elastocaloric cooling system. Sci Technol Built Environ 22:500–506. https://doi.org/10.1080/23744731.2016.1171630
Qian S, Wang Y, Geng Y et al (2016) Experimental evaluation of compressive elastocaloric cooling system. Int Refrig Air Cond Conf
Wittel H, Spura C, Jannasch D (2021) Roloff/Matek Maschinenelemente, 25th edn. Springer Vieweg, Wiesbaden
Moench S, Reiner R, Waltereit P et al (2022) Enhancing electrocaloric heat pump performance by over 99% efficient power converters and offset fields. IEEE Access 10:46571–46588. https://doi.org/10.1109/ACCESS.2022.3170451
Moench S, Mansour K, Reiner R et al (2022) A GaN-based DC-DC converter with zero voltage switching and hysteretic current control for 99% efficient bidirectional charging of electrocaloric capacitive loads. PCIM Europe 2022
Lagoudas DC (2008) Shape memory alloys: modeling and engineering applications, vol 1. Springer, Boston
Tietze U, Schenk C, Gamm E (2019) Halbleiter-Schaltungstechnik, 16., erweiterte und aktualisierte Auflage. Springer Vieweg, Berlin
Schipper J, Bach D, Mönch S et al (2023) On the efficiency of caloric materials in direct comparison with exergetic grades of compressors. J Phys Energy 5:45002. https://doi.org/10.1088/2515-7655/ace7f4
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This invited article is part of a special topical focus in Shape Memory and Superelasticity on Elastocaloric Effects in Shape Memory Alloys. The issue was organized by Stefan Seelecke and Paul Motzki, Saarland University.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Unmüßig, S., Burghardt, A., Schäfer-Welsen, O. et al. Highly Efficient Drive System for Elastocaloric Heat Pumps and Cooling Systems. Shap. Mem. Superelasticity (2024). https://doi.org/10.1007/s40830-024-00487-9
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40830-024-00487-9