
Abstract
Needle-like microstructures are often observed in shape memory alloys near macro-interfaces that separate regions with different laminate orientation. We study their shape with a two-dimensional model based on nonlinear elasticity, that contains an explicit parametrization of the needle profiles. Energy minimization leads to specific predictions for the geometry of needle-like domains. Our simulations are based on shape optimization of the needle interfaces, using a polyconvex energy density with cubic symmetry for the elastic problem, and a numerical implementation via finite elements on a dynamically changing grid.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Martensitic materials are well known to exhibit rich microstructures that are associated with the solid–solid phase transformation [1, 2]. It is widely believed that the formation of those patterns leads to an energy barrier which plays a crucial role in the hysteresis and reversibility of the phase transformation itself [3, 4]. Mathematically, these microstructures are typically modelled within the framework of the phenomenological theory of martensite [5], i.e., as minimizers of continuum elasticity functionals of the form
where \(\Omega\) denotes the reference domain and W is a free elastic energy density which reflects the crystallography of the phase transformation and depends on the deformation gradient and the temperature. Here we work at fixed temperature below the transformation temperature, and we drop it from the notation. This modelling ansatz has proven successful to predict certain properties of the microstructures such as orientations of interfaces. However, it is often not sufficient to predict length scales of multiscale patterns. Therefore, one often introduces a regularizing surface energy term that penalizes interfaces between regions of different martensitic variants. Starting with the work by Kohn and Müller in the early 90s [6, 7], there has been a huge body of literature on the understanding of minimizers of such functionals in simplified settings, in particular scaling laws for the minimal energy (see for example [8,9,10,11,12] and references therein). These results generally indicate that for certain materials one expects rather uniform structures close to interfaces, while for others, complicated multiscale branching patterns are predicted. This is in accordance with experimental results (see e.g. [13]). However, only in very few and restricted situations, there are results on more quantitative properties of minimizers, such as periodicity or self-similarity (see [14,15,16]).
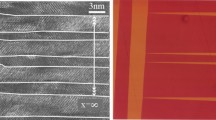
In this note, we report results on the modelling and quantitative study of special microstructures, so called needle-type patterns, building in particular on the recent works [17,18,19]. Needle-like patterns consist of laminated structures where one variant thins out close to the interface. These patterns are often found in experiments, and appear to be rather stable. It is remarkable that they occur in very different materials, including shape-memory alloys (for instance, NiAl) and perovskites (for instance, YBaCuO), at very different length-scales ranging from a few nanometers to tenths of micrometers, and at both, martensite/martensite and martensite/austenite interfaces (see e.g. [13, 20,21,22]).
It has been found that models based on finite elasticity are well-suited to describe such needle patterns, while linearized elasticity is not able to predict the relevant length scales. This has been observed in various numerical experiments (see [17] and the references discussed there) and has been made rigorous in terms of an energy scaling law for the minimal energy [18]. Therefore, we deal only with numerical experiments in the context of finite elasticity. We focus on three materials in which needle-like patterns have often been observed, namely NiAl, CuAlNi and YBaCuO. We study the dependence of the needle shape on various parameters, in particular the elastic constants (the anisotropy ratio and the Poisson ratio), the eigenstrain, and the volume fraction of the laminate. To obtain quantitative results, a careful and physically reasonable choice of the free energy density W is essential. Therefore, after setting the notation in section “Geometry of Needles”, we will discuss our choice of the free energy density in section “Energy Density”. The numerical implementation is described in section “Shape Optimization, Numerical Implementation”, and the results are presented in section “Results”.
Geometry of Needles
We focus on the structure of needle-type interfaces, and make an ansatz which in particular excludes branching of the needles. It is widely believed that branched patterns of two martensitic variants are favored if the transition layer is sufficiently wide compared to the height of the laminate, see e.g. [13]. This can be seen already in the following back-of-the-envelope computation for scalar-valued toy models [7]: Assume that a planar microstructure is mainly described by the out-of plane component of the displacement \(u:R\rightarrow \mathbb {R}\) in a rectangular transition layer \(R:=(0,L)\times (0,H)\), where we assume the interface to be at the left edge of the rectangle (at \(\{x=0\}\)). Within this ansatz, an energy based on the phenomenological theory from [5] is essentially estimated by the Kohn–Müller-type energy (see e.g. [23] for a computation)
where the preferred gradients \((0,\theta )\) and \((0,-1+\theta )\) represent the two variants of martensite, and the second term is to be understood distributionally. Roughly speaking, for functions u with \(\partial _2u\in \{-1+\theta ,\theta \}\) almost everywhere, this term can be computed by integrating \(N(x_1)\) over (0, L), where \(N(x_1)\) denotes the number of interfaces on the slice \(\{x_1\}\times (0,H)\) (the number of times that \(\partial _2u\) flips from \(\theta\) to \(-1+\theta\) or vice versa). To model the mesoscopic interface, we assign a boundary condition \(u(0,\cdot )=0\), and to model the laminate away from the interface, we assign periodic boundary conditions in vertical direction \(u(\cdot ,0)=u(\cdot ,H)\) and a Dirichlet boundary condition corresponding to a simple laminate, i.e.,
There is a large body of literature on this model, and the scaling law of the minimal energy in various settings is well-understood. It has been shown that many properties of more general vectorial models (see e.g. [8, 10, 11, 24] and the references therein) are already captured by such toy models. We refer to [25] for a recent discussion in relation with experimental images.
The test functions that have been used to prove the upper bound in the energy scaling laws quantify the expectation that for small values of the surface energy \(\varepsilon\), branched patterns are expected, while for large values of \(\varepsilon\), optimal structures are more uniform. We focus here on the case of small \(\varepsilon\) where complex pattern formation is expected. More precisely, within the model described above, for branching-type patterns with periodic boundary conditions (see the sketch in Fig. 1) the energy scales like \(\varepsilon L+\frac{\theta ^2H^3}{L}\) (see e.g. [10, Lemma 5.1] with \(\eta =\theta H\) for a building block and the branching-type constructions described thereafter, as well as the references given there). On the other hand, simple needle-type structures have an energy scaling like \(\varepsilon L+\frac{\theta ^2H^3}{\ell }+\theta ^2\ell H\), where \(\ell\) is the tapering length of the needle, or equivalently of the transition region (see also [4, 23] for an analogous computation in the context of linearized elasticity). Therefore, in terms of energy scaling, needles are competitive compared to branching if \(H\sim \ell \sim L\), and can thus be even energetically preferred, depending on the precise constants.

Sketch of a laminate ending in a needle (left) and of a branching pattern (right). As both patterns are periodic, in the following we focus only on one period. The macrointerface is drawn vertical for simplicity, the true slope has an angle of order \(\delta \theta\) with the vertical
In this note, we continue and complement the recent studies in [17, 19] and consider a martensitic macrotwin where a laminate of two variants of martensite of volume fractions \(\theta\) and \(1-\theta\) meets a rotated martensitic variant at a straight interface (see Fig. 1). The model is vectorial and geometrically nonlinear. The two variants are given by eigenstrains \(U^1\) and \(U^2\), which we can assume to be of the form (see [26, Section 5])
where \(\delta\) measures the strain; relevant values are given in Table 1. These variants can form a laminate with (vertical) normal \(e_2\), and a macrotwin as in Fig. 1 with a normal vector parallel to \(e_1+\delta \theta e_2\), i.e., a vector rotated by an angle of order \(\delta \theta\) with respect to the (horizontal) vector \(e_1\) (for details see e.g. [18, Lemma 2.1]).
To determine the optimal needle geometry within this ansatz, we perform a two-level optimization: Given the boundary curves of the needle, we minimize the elastic energy in the transition layer [see (4.1)], the result only depends on the shape of the needle (see Fig. 2). The optimal needle structure is then the one for which this minimal elastic energy is itself minimized. The specific boundary conditions and the class of ansatz functions are presented in section “Shape Optimization, Numerical Implementation”. An essential ingredient here is the free energy density, that is discussed in section “Energy Density”.
As mentioned above, we restrict ourselves to the setting of nonlinear elasticity. Although the linear theory has proven useful to explain higher order effects (see e.g. [27] and the references therein), it has been found that approximations in terms of linearized elasticity are not appropriate to understand the qualitative behaviour in terms of the tapering length scale (see [18] for a heuristic as well as a rigorous argument). Roughly speaking, the main factor determining the length scale of the pattern seems to be the change in rotation: Close to the macrotwin interface the relevant rotation is the one which is determined by the other rank-one connection between the martensitic variants, which differs from the one used in the laminates by an angle of order \(\delta \theta\).

Sketch of the shape-optimization problem in a periodic cell. The thick white curves are the boundaries of the needle which are optimized, together with the length \(\ell\) and the shift \(\Delta\) of the needle
Energy Density
We shall write the energy density \(W^i:\mathbb {R}^{2\times 2}\rightarrow [0,\infty ]\) of the i-th martensitic variant, with eigenstrain \(U^i\) as in (2.1), in terms of the energy density \(W_A\) of the austenite, which we take as reference configuration, as
Therefore, it suffices to identify a suitable function \(W_A\). We start listing our requirements on this function, then discuss some proposals present in the literature and motivate our choice.
Requirements on\(W_A\) The energy density \(W_A\) needs to satisfy the invariance property
where \(P_A\subseteq \text {O}(2)\) is the point group of the austenite. In our case \(P_A\) is the cubic group. We require the growth condition
with \(W_A(F)=\infty\) if \(\det F\le 0\), in order to accommodate for non-interpenetrability of matter. The energy density \(W_A\) should be minimized at the identity. After adding an irrelevant constant and using (3.2) this is the same as
We expect microstructure to only appear due to the presence of the different phases or variants. In particular, if the material is entirely in the austenitic phase, then energy minimization should not generate spontaneous microstructure or spurious oscillations. Therefore we require \(W_A\) to be polyconvex, in the sense that
for some convex and lower-semicontinuous function \(g:\mathbb {R}^{2\times 2}\times \mathbb {R}\rightarrow [0,\infty ]\). We recall that polyconvexity implies lower semicontinuity of variational problems of the form \(\int _\Omega (W_A(Du) -f\cdot u) \mathrm{{d}}x\), and is therefore crucial in proving existence of minimizers. Further, polyconvexity implies the Legendre–Hadamard condition, which in turn is equivalent to rank-one convexity, i.e., to the fact that the function
is convex for any \(F\in \mathbb {R}^{2\times 2}\), \(a,b\in \mathbb {R}^2\). We refer to [28] for a mathematical background on these concepts.
Finally, we require \(W_A\) to reproduce the experimentally known elastic constants of austenite around the identity, in the sense that
where \(\mathbb {C}\in \mathbb {R}^{2\times 2\times 2\times 2}\) is the elasticity tensor. In the cubic case this reduces to
where the elastic constants \(\mathbb {C}_{12}\), \(\mathbb {C}_{44}\) and \(\mathbb {C}':=(\mathbb {C}_{11}-\mathbb {C}_{12})/2\) are all positive in the relevant situation (see Table 1). The cubic anisotropy of the material is normally quantified by the parameter A defined by
one can easily check that for isotropic materials \(A=1\).
In summary, our aim is an expression for \(W_A\) which has the invariances stated in (3.2), is minimized on rotations as in (3.4), is polyconvex in the sense of (3.5), linearizes to (3.8) around the identity, and has sufficient growth and regularity to permit easy and stable computations.
Some candidates from the literature In the literature, one often uses a linear elastic energy of the form \(\frac{1}{2} \sum _{ijkl}\mathbb {C}_{ijkl} \epsilon _{ij}\epsilon _{kl}\) evaluated on the nonlinear elastic strain \(\frac{1}{2} (F^TF-\textrm{Id})\), resulting in expressions of the type
see for example [29, Eq. (40)] or [30, Section 2]. However, these expressions are not rank-one convex, and therefore not polyconvex. To see this, we fix any unit vector b and consider the rank-one line
One computes \(F_t^TF_t-\textrm{Id}=(t^2+2t) b\otimes b\), so that (3.10) gives
Since \(\mathbb {C}\) defines a quadratic form which is strictly positive on nonzero symmetric matrices, \(\mathbb {C}b\otimes b\otimes b\otimes b>0\). However, the polynomial \(p(t):=(t^2+2t)^2 = (t+2)^2 t^2\) is not convex. Therefore \(W_\mathbb {C}\) is not rank-one convex, and not polyconvex, for any sensible choice of the elastic coefficients \(\mathbb {C}\). One expects that this lack of convexity leads to numerical instabilities if this part of the space of strains (which is relatively far from the identity, as one can see from \(\det F_{-1/2}=1/2\)) is explored in a numerical simulation; apparently this was not the case in the cited papers.
A polyconvex expression with cubic symmetry was proposed by Kambouchev et al. in [31, Eq. (9)]. In 3D, they define
and show that if the four coefficients are nonnegative then \(W_\textrm{KFR}^{(3)}\) is polyconvex. Condition (3.4) implies \(-\alpha _1+\alpha _2+2\alpha _3+\alpha _4=0\). Comparing with the cubic linearization (3.8) they obtain \(\alpha _3=(\mathbb {C}'-\mathbb {C}_{44})/4\) and \(\alpha _4=(2\mathbb {C}_{44}-\mathbb {C}')/2\), which are nonnegative only if the anisotropy ratio fulfills
(see [31, Eq. (14)]). This condition is fulfilled by many metals but not by the shape-memory alloys of interest here, which have larger values of A (see Table 1). In two dimensions, one would equivalently write
with similar results. We show that the relevant condition \(A\le 1\) is indeed necessary for polyconvexity of (3.15). It suffices to consider matrices of the form \(F_t=\textrm{Id}+t e_2\otimes e_1\), which give \(W_\textrm{KFR}^{(2)}(F_t)=\alpha _2+\alpha _3(1+(1+t^2)^2) +\alpha _4(2+t^2)\). For large t the leading-order term is \(\alpha _3t^4\), which is convex only if \(\alpha _3\ge 0\). Therefore the condition \(\alpha _3\ge 0\), which implies \(A\le 1\), is necessary for rank-one convexity and, hence, for polyconvexity.
A variant of this formula was used in [17], precisely,
The change was that the first term is fourth-order and not quadratic, so that it matches the order of the second and the fourth one. The expression in (3.16) is obviously polyconvex if the four coefficients are nonnegative. Even more, one can show that it is polyconvex provided \(a_1\ge 0\), \(a_2\ge 0\), \(a_3\ge 0\), and \(a_4\ge -\frac{2}{3} a_1\). To see this, it suffices to first check (for example, computing the Hessian) that the function \(g:\mathbb {R}^2\rightarrow \mathbb {R}\), \(g(x,y):=x^4+y^4+6x^2y^2\), is convex, and then to observe that by the chain rule this implies convexity of \(F\mapsto g(|Fe_1|,|Fe_2|)=3|F|^4- 2|Fe_1|^4-2|Fe_2|^4\).
The difference from (3.15) to (3.16) however improves the range of admissible values of A. In fact, condition (3.4) implies \(4a_1+a_2-a_3+2a_4=0\). Linearizing (3.16), we obtain that (3.8) is equivalent to
which readily shows that the largest value of A that can be attained in the polyconvex range is \(A=2\). This improvement over (3.14) is not sufficient for the present purposes. Indeed, in [17], using values for the elastic constants appropriate for NiAl listed in Table 1, the coefficients \(a_1=11.56\mathrm {\,GPa}\), \(a_2=-17.44\mathrm {\,GPa}\), \(a_3=10.04\mathrm {\,GPa}\), \(a_4=-9.38\mathrm {\,GPa}\) were obtained (up to an irrelevant global factor of 2). Clearly they are not in the range in which the expression above is guaranteed to be polyconvex. In the numerical computations presented in [17], as in the case of the papers based on (3.10), this did not cause any difficulty.
In closing this review we show that the expression in (3.16) is not rank-one convex whenever \(a_4<-\frac{2}{3} a_1\), which is the same as \(A>2\). Consider for some \(\beta >0\) the rank-one line
Clearly \(\det F_t=1\) for all t and \(\beta\), so that the two terms depending on the determinant are irrelevant, and \(W_{2020}(F_t)\) is a fourth-order polynomial in t. One computes
If \(a_4<-\frac{2}{3}a_1\) then the first coefficient is negative, and choosing \(\beta\) sufficiently small leads to a negative second derivative in a rank-one direction.
Construction of \(W_A\) In [19] we developed a new expression that is able to obtain polyconvexity for arbitrarily large values of the cubic anisotropy parameter A. It depends on four independent small parameters \(\rho _1\), \(\rho _2\), \(\rho _3\), \(\rho _4\in (0,1)\) via the functions \(h_\rho :[0,\infty )\rightarrow \mathbb {R}\),
\(g_\rho :[0,\infty )^2\rightarrow \mathbb {R}\),
and \(f_\rho :\mathbb {R}\rightarrow [0,\infty ]\),
One can easily check that all three functions are convex, continuously differentiable (whenever they are finite), lower semicontinuous, and that the first two are nondecreasing. Finally, for any \(\rho \in (0,1)^4\) and \(b\in (0,\infty )^4\) we set
This function is polyconvex, has the desired invariance and minimizers. Computing the Taylor series to second order and comparing to (3.8) one can see that
The matrix \(\textrm{Id}+ M_\rho\) is, for \(\rho\) small, invertible. Further, for any positive value of the three elastic constants one obtains that if the \(\rho\)’s are chosen sufficiently small then the resulting b’s are nonegative, and \(W_A\) is polyconvex. The smallness of \(\rho\) depends, however, on \(\mathbb {C}\). Examples are given in Table 2 below.
Shape Optimization, Numerical Implementation
Parametrization of Subdomains
In what follows we will decompose the energy in the two phase components with fixed topology using the domain decomposition approach developed in [17, 19]. To this end we consider a physical reference configuration \(\Omega = \Omega ^1\cup \Omega ^2\) where the actual domains of the martensitic variants \(\Omega ^1\), \(\Omega ^2\) are parametrized over subdomains \(\hat{\Omega }^1\), \(\hat{\Omega }^2\) of a computational reference configuration \(\hat{\Omega }\) via a parameter-dependent bijective transformation \(\psi [\alpha ]:\hat{\Omega }\rightarrow \Omega\) with \(\Omega ^i = \psi [\alpha ](\hat{\Omega }^i)\), where \(\alpha\) is a small set of parameters (Fig. 3).

The computational domain \(\hat{\Omega }\) (left) is transformed by \(\psi [\alpha ]\) into the physical reference domain \(\Omega\) (middle), which is then deformed elastically by \(\phi\) to the deformed configuration \(\phi (\Omega )\) (right)
Given the two eigenstrains \(U^1\) and \(U^2\) [see (2.1)], the elastic energy decomposes correspondingly
with \(W^i\) defined by (3.1) and (3.23).
Given the parametrization \(\psi [\alpha ]\) of the physical domains the energy can be rewritten as
where \({\hat{x}}\) are computational reference coordinates representing the change of variables \(x = \psi [\alpha ](\hat{x})\) and \(\hat{D}\) is the Jacobian in these coordinates, and the associated elastic deformation \(\hat{\phi } = \phi \circ \psi [\alpha ]\) in reference coordinates. For the differentiation we have applied the chain rule \(\hat{{D}}\hat{\phi }(\hat{x}) = {D}\phi (\psi [\alpha ](\hat{x})) \hat{D}\psi [\alpha ](\hat{x})\).
We minimize \(\hat{\mathcal {E}}\) with respect to \(\alpha\) and with respect to \(\hat{\phi }\). Minimizing over \(\hat{\phi }\) for fixed \(\alpha\) and thus for fixed geometry reflects the solution of the elastic state equation in reference coordinates \({\hat{x}}\). Let us denote the minimizer by \(\hat{\phi }[\alpha ]\). Minimizing
over \(\alpha\) turns into solving the actual free boundary problem. Thus, in the presented form the free boundary problems can be considered as a joint minimization with respect to \(\alpha\) and \(\hat{\phi }\). The solution to this elastic shape optimization problem will be described below in section “Optimization”.
The physical domain parametrization \(\psi [\alpha ]\) primarily parametrizes the geometry of the phase boundaries. The parametrization of the interior of the phases can be chosen freely as long as the mapping \(\psi [\alpha ]\) is bijective and for implementational purposes sufficiently regular. In what follows, we explicitly describe \(\psi [\alpha ]\) on \(\partial \hat{\Omega }^1\) which in particular also determines the transformation of \(\partial \hat{\Omega }^2\).
In the computational reference configuration \(\partial \hat{\Omega }^1\) is assumed to be polygonal. For each edge \({\hat{e}}\) from \(\hat{a}=(\hat{a}_1,\hat{a}_2)\) to \(\hat{b}=(\hat{b}_1,\hat{b}_2)\) we consider \(\psi [\alpha ]\vert _{{\hat{e}}}\) as a graph over \({\hat{x}}_1\) (which reflects that the needles are horizontally stretched).
Using quadratic polynomials for the parametrization of the upper and lower edge of the needle tip we obtain
The above parameters a and b are given functions of the needle length \(\ell\) and the shift parameter \(\Delta\). Besides \(\ell\) and \(\Delta\) the parameter vector \(\alpha\) includes the parameters \(\kappa\) for the upper and the lower edge.
To define \(\psi [\alpha ]\) not only on \(\partial \hat{\Omega }^1\) and \(\partial \hat{\Omega }\) but also in the interior of the phases (and thus on the whole domain \(\hat{\Omega }\)) we use a harmonic extension approach. We define \(\psi [\alpha ]: \hat{\Omega }\rightarrow \Omega\) by
where \(\mathcal {D[\alpha ]} = \big \{\zeta : \hat{\Omega }\rightarrow \Omega \,\big \vert \, \zeta \vert _{{\hat{e}}} = \psi [\alpha ]\vert _{{\hat{e}}} \text{ on } \text{ all } \text{ edges } e \subset \partial \hat{\Omega }^1 \big \}\).
If \(\psi [\alpha ] - \textrm{Id}\) is small and sufficiently regular on \(\partial \hat{\Omega }^1\), the extended \(\psi [\alpha ]\) is ensured to be bijective.
Finite Element Discretization
We consider piecewise affine finite elements on the computational domain \(\hat{\Omega }\), where \(\partial \hat{\Omega }^1\) is composed of edges of the triangulation \(\mathcal {T}_h\) with vertices \({\hat{x}}_h\), the index h indicating the grid size. The corresponding (vector valued) finite element space is denoted by \(\mathcal {V}_h\).
The extension (4.4) of the phase boundary parametrization on \(\partial \hat{\Omega }^1\) then reads as follows:
where \(\mathcal {D}_h[\alpha ] = \{\zeta _h \in \mathcal {V}_h \,\vert \, \zeta _h ({\hat{x}}_h) = \psi [\alpha ] ({\hat{x}}_h) \text{ for } \text{ all } \text{ vertices } {\hat{x}}_h \text{ on } \partial \hat{\Omega }^1 \}\). The solution operator of (4.5) is represented by a fixed matrix mapping vertex values on vertices \({\hat{x}}_h\) on \(\partial \hat{\Omega }^1\) to values on all vertices of the triangulation \(\mathcal {T}_h\). This matrix can be straightforwardly computed based on the finite element stiffness matrix associated to Poisson’s problem.
This turns the Euler–Lagrange-equation of
into a standard conforming finite element discretization of the Euler–Lagrange-equation of (4.2) and requires the solution of a nonlinear system of equations in \(\mathcal {V}_h\), performed here via Newton’s method. For fixed \(\alpha\), the minimizer of \(\hat{\mathcal {E}}_h[\alpha ,\cdot ]\) is then denoted by \(\hat{\phi }_h[\alpha ]\) and an evaluation of \(\hat{\mathcal {E}}_h\) then immediately yields the value of the discrete shape functional \(\mathcal {J}_h[\alpha ] :=\hat{\mathcal {E}}_h[\alpha ,\hat{\phi }_h[\alpha ]]\).
Optimization
So far, the free boundary problem is described as an optimization problem of the parametrization \(\psi [\alpha ]\) of the phase boundary as a function of the parameter vector \(\alpha\) subject to the constraint that \(\hat{\phi }\) minimizes the elastic energy given in (4.2). As described above, the finite element discretization of this optimization problem turns into a minimization problem with nonlinear constraints. For the solution of the discrete state equation we use the finite element library FEniCS. For details we refer to [36,37,38,39,40,41,42,43,44].
To evaluate the discrete shape gradient \(\partial _\alpha \mathcal {J}_h[\alpha ]\) via the adjoint calculus we use the additional package Dolfin Adjoint [45,46,47]. As input this only requires the solution of the forward map \(\alpha \mapsto \phi _h[\alpha ]\) via solving the state equation. In fact, Dolfin Adjoint tracks all steps of this computation and automatically configures the adjoint derivative. Based on this shape gradient, a limited memory BFGS method with constraints [48] is used for the actual optimization (with SciPy minimization parameters \(ftol=10^{-16}\), \(gtol = 10^{-12}\) and \(maxiter=200\)).
Results
In this section, we present numerical results for the optimal shapes in different materials.
Figure 4 shows the needle geometries for the three different materials NiAl, CuAlNi and YBaCuO in the physical reference configuration. One clearly observes a significant influence of the material constants on the needle length. If one rescales the optimal needle geometries so that they have the same length, they become very similar. In the rest of this section we discuss the effect of various parameters on the length of the needle.

Top: optimal needle geometries for NiAl, CuAlNi and YBaCuO (from top to bottom, scaled anisotropically with a factor of 0.25 in x-direction) are plotted in physical reference configuration. The length of the needle tip is indicated by triangle pointers and a dotted line. The right boundary of the computational domain is marked by a small white gap with a horizontal continuation on the right. Bottom: Fixing the tip of all needles at the same position and scaling them all to the same length, the different needle contours (NiAl solid red, CuAlNi-dashed green, YBaCuO dotted blue) are compared
Influence of the order parameter\(\delta\) In Fig. 5, we show the dependence of the needle length on the order parameter \(\delta\) for the elastic parameters of NiAl. It is apparent that the needle length has a very strong dependence on the order parameter \(\delta\) and it diverges as \(\delta \rightarrow 0\), as was already discussed in [17, 18]. Indeed, this dependence of the needle length on the order parameter explains most of the variability observed in Fig. 4. The asymmetry reflected by the shift \(\Delta\) of the needle tip gets larger in absolute value for increasing \(\delta\).
Influence of material constants The energy density depends on the three material constants \(\mathbb {C}_{11}\), \(\mathbb {C}_{12}\) and \(\mathbb {C}_{44}\). Neglecting the overall scaling there are two remaining degrees of freedom. In what follows, we investigate the influence of the anisotropy ratio \(A=2\mathbb {C}_{44}/(\mathbb {C}_{11}-\mathbb {C}_{12})\) and the Poisson ratio \(\nu =\mathbb {C}_{12}/\mathbb {C}_{11}\) via modulation of the parameters A and \(\nu\) starting from the material constants \(\mathbb {C}_{11}=115.5\), \(\mathbb {C}_{12}= 45.5\) and \(\mathbb {C}_{44}=110\) of NiAl. Here, we choose fixed \(\rho _1=0.1\), \(\rho _2=0.2\), \(\rho _3=0.1\), \(\rho _4=0.5\), \(b_4=1\). In detail, fixing \(\mathbb {C}_{11}\) and \(\mathbb {C}_{12}\) we set \({\mathbb {C}}_{44} = 0.5A (\mathbb {C}_{11}-\mathbb {C}_{12})\) for varying A. For varying \(\nu\) and fixed A, we hold \(\mathbb {C}_{11}\) fixed and set \({\mathbb {C}}_{12} = \nu \mathbb {C}_{11}\) and \({\mathbb {C}}_{44}=0.5A(\mathbb {C}_{11}-\bar{\mathbb {C}}_{12})\). The appropriate \(b_i\) are then calculated via Eq. (3.24). The results are shown in Fig. 6.

Optimal shape length \(\ell\) and shift \(\Delta\) for different values of the order parameter \(\delta\)

Optimal needle length \(\ell\) as a function of the anisotropy parameter A (left) and of the Poisson ratio \(\nu\) (right)
Influence of the volume fraction\(\theta\) Figure 7 shows that needle tips are shorter for larger values of the volume fraction \(\theta\), again using the elastic parameters of NiAl. Even though for varying values of \(\theta\) the underlying finite element mesh is updated to avoid over stretching of elements the general profile of the dependence of \(\ell\) on \(\theta\) is clearly visible. The needles become longer as \(\theta\) decreases, but—at variance with what has been discussed above in the case of \(\delta\)—we do not expect the length of the needle to diverge as \(\theta \rightarrow 0\).

Optimal needle length \(\ell\) for different values of the volume fraction \(\theta\)
References
Salje EKH (1990) Phase transitions in ferroelastic and co-elastic crystals. Cambridge University Press, Cambridge
Bhattacharya K (2003) Microstructure of martensite: why it forms and how it gives rise to the shape-memory effect. Oxford University Press, Oxford
Cui J, Chu Y, Famodu O, Furuya Y, Hattrick-Simpers J, James R, Ludwig A, Thienhaus S, Wuttig M, Zhang Z, Takeuchi I (2006) Combinatorial search of thermoelastic shape-memory alloys with extremely small hysteresis width. Nat Mater 5:286–290
Zhang Z, James RD, Müller S (2009) Energy barriers and hysteresis in martensitic phase transformations. Acta Mater 57:4332–4352
Ball JM, James RD (1987) Fine phase mixtures as minimizers of energy. Arch Ration Mech Anal 100:13–52
Kohn RV, Müller S (1992) Branching of twins near an austenite/twinned-martensite interface. Philos Mag A 66:697–715
Kohn RV, Müller S (1994) Surface energy and microstructure in coherent phase transitions. Commun Pure Appl Math 47:405–435
Capella A, Otto F (2009) A rigidity result for a perturbation of the geometrically linear three-well problem. Commun Pure Appl Math 62:1632–1669
Knüpfer H, Kohn RV, Otto F (2013) Nucleation barriers for the cubic-to-tetragonal phase transformation. Commun Pure Appl Math 66:867–904
Conti S, Zwicknagl B (2016) Low volume-fraction microstructures in martensites and crystal plasticity. Math Models Methods Appl Sci 26:1319–1355
Conti S, Diermeier J, Melching C, Zwicknagl B (2020) Energy scaling laws for geometrically linear elasticity models for microstructures in shape memory alloys. ESAIM Control Optim Calc Var 26:115. https://doi.org/10.1051/cocv/2020020
Conti S, Kohn RV, Misiats O (2022) Energy minimizing twinning with variable volume fraction, for two nonlinear elastic phases with a single rank-one connection. Math Models Methods Appl Sci 32:1671–1723. https://doi.org/10.1142/S0218202522500397
James RD, Kohn RV, Shield T (1995) Modeling of branched needle microstructures at the edge of a martensite laminate. Le Journal de Physique IV 5:C8–C253
Conti S (2000) Branched microstructures: scaling and asymptotic self-similarity. Commun Pure Appl Math 53:1448–1474
Giuliani A, Müller S (2012) Striped periodic minimizers of a two-dimensional model for martensitic phase transitions. Commun Math Phys 309:313–339
Conti S, Diermeier J, Koser M, Zwicknagl B (2021) Asymptotic self-similarity of minimizers and local bounds in a model of shape-memory alloys. J. Elast 147:149–200. https://doi.org/10.1007/s10659-021-09862-4
Conti S, Lenz M, Lüthen N, Rumpf M, Zwicknagl B (2020) Geometry of martensite needles in shape memory alloys. C R Math 358:1047–1057
Conti S, Zwicknagl B (2023) The tapering length of needles in martensite/martensite macrotwins. Arch Ration Mech Anal 247:63. https://doi.org/10.1007/s00205-023-01882-9
Conti S, Lenz M, Rumpf M, Verhülsdonk J, Zwicknagl B (2023) Microstructure of macrointerfaces in shape-memory alloys. J Mech Phys Solids. https://doi.org/10.1016/j.jmps.2023.105343
Schryvers D, Boullay P, Kohn R, Ball J (2001) Lattice deformations at martensite–martensite interfaces in Ni–Al. J Phys IV France 11:Pr8.23–Pr8.30
Salje E, Zhang H (2009) Domain boundary engineering. Phase Transit 82:452–469
Chu C-H (1993) Hysteresis and microstructures: a study of biaxial loading on compound twins of copper–aluminium–nickel single crystals. PhD Thesis, University of Minnesota
Zwicknagl B (2014) Microstructures in low-hysteresis shape memory alloys: scaling regimes and optimal needle shapes. Arch Ration Mech Anal 213:355–421
Chan A, Conti S (2015) Energy scaling and branched microstructures in a model for shape-memory alloys with \(SO(2)\) invariance. Math Models Methods Appl Sci 25:1091–1124
Seiner H, Plucinsky P, Dabade V, Benešová B, James RD (2020) Branching of twins in shape memory alloys revisited. J Mech Phys Solids 141:103961
Ball JM, James RD (1992) Proposed experimental tests of a theory of fine microstructure and the two-well problem. Philos Trans R Soc A 338:389–450
Schryvers D, Boullay P, Potapov P, Kohn R, Ball J (2002) Microstructures and interfaces in Ni–Al martensite: comparing HRTEM observations with continuum theories. Int J Solids Struct 39:3543–3554
Dacorogna B (2008) Direct methods in the calculus of variations. In: Volume 78 of applied mathematical sciences, 2nd edn. Springer, New York
Aubry S, Fago M, Ortiz M (2003) A constrained sequential-lamination algorithm for the simulation of sub-grid microstructure in martensitic materials. Comput Methods Appl Mech Eng 192:2823–2843
Li B, Luskin M (1999) Theory and computation for the microstructure near the interface between twinned layers and a pure variant of martensite. Mater Sci Eng A 273:237–240
Kambouchev N, Fernandez J, Radovitzky R (2007) A polyconvex model for materials with cubic symmetry. Model Simul Mater Sci Eng 15:451–467
Sedlák P, Seiner H, Landa M, Novák V, Šittner P, Mañosa L (2005) Elastic constants of BCC austenite and 2H orthorhombic martensite in CuAlNi shape memory alloy. Acta Mater 53:3643–3661
Huang X, Naumov II, Rabe KM (2004) Phonon anomalies and elastic constants of cubic \(\rm NiAl\) from first principles. Phys Rev B 70:064301
Kuzel P, Dugautier C, Moch P (2001) Comparative study of hypersonic propagation in YBa\(_{{\rm 2}}{{\rm Cu}}_{{\rm 3}}{{\rm O}}_{{\rm 7}}-\delta\) single crystals and thin films. J Phys Condens Matter 13:167–175
Lei M, Ledbetter H (1991) Oxides and oxide superconductors: elastic and related properties. Interagency/internal report, National Institute of Standards and Technology. https://www.nist.gov/publications/oxides-and-oxide-superconductors-elastic-and-related-properties
Alnaes MS, Blechta J, Hake J, Johansson A, Kehlet B, Logg A, Richardson C, Ring J, Rognes ME, Wells GN (2015) The FEniCS project version 1.5. Arch Numer Softw 3:1–15
Logg A, Mardal K, Wells GN et al (2012) Automated solution of differential equations by the finite element method. Springer, Berlin
Logg A, Wells GN, Hake J (2012) DOLFIN: a C++/Python finite element library. In: Logg KMA, Wells GN (eds) Automated solution of differential equations by the finite element method, volume 84 of lecture notes in computational science and engineering, chapter 10. Springer, pp 173–225
Kirby RC, Logg A (2006) A compiler for variational forms. ACM Trans Math Softw 32:417–444
Logg A, Ølgaard KB, Rognes ME, Wells GN (2012) FFC: the FEniCS form compiler. In: Logg KMA, Wells GN (eds) Automated solution of differential equations by the finite element method, volume 84 of lecture notes in computational science and engineering, chapter 11. Springer, pp 227–238
Ølgaard KB, Wells GN (2010) Optimisations for quadrature representations of finite element tensors through automated code generation. ACM Trans Math Softw 37:1–23
Alnaes MS, Logg A, Ølgaard KB, Rognes ME, Wells GN (2014) Unified form language: a domain-specific language for weak formulations of partial differential equations. ACM Trans Math Softw 40:1–37
Kirby RC (2004) Algorithm 839: FIAT, a new paradigm for computing finite element basis functions. ACM Trans Math Softw 30:502–516
Kirby RC (2012) FIAT: numerical construction of finite element basis functions. In: Logg KMA, Wells GN (eds) Automated solution of differential equations by the finite element method, volume 84 of lecture notes in computational science and engineering, chapter 13. Springer, pp 247–255
Mitusch SK, Funke SW, Dokken JS (2019) Dolfin-adjoint 2018.1: automated adjoints for FEniCS and Firedrake. J Open Source Softw 4:1292
Dokken JS, Mitusch SK, Funke SW (2020) Automatic shape derivatives for transient PDEs in FEniCS and Firedrake. arXiv:2001.10058
Funke SW, Farrell PE (2013) A framework for automated PDE-constrained optimisation. arXiv:1302.3894
Byrd RH, Lu P, Nocedal J, Zhu C (1995) A limited memory algorithm for bound constrained optimization. SIAM J Sci Comput 16:1190–1208
Acknowledgements
This work was partially funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) through project 211504053/SFB1060 and project 441211072/SPP2256. J. Verhülsdonk was funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany’s Excellence Strategy – EXC-2047/1 – 390685813 and – EXC2151 – 390873048. We would like to thank Nora Lüthen for helpful discussions.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is an invited submission to Shape Memory and Superelasticity selected from presentations at the 12th European Symposium on Martensitic Transformations (ESOMAT 2022) held September 5–9, 2022 at Hacettepe University, Beytepe Campus, Ankara, Turkey, and has been expanded from the original presentation. The issue was organized by Prof. Dr. Benat Koҫkar, Hacettepe University.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Conti, S., Lenz, M., Rumpf, M. et al. Geometry of Needle-Like Microstructures in Shape-Memory Alloys. Shap. Mem. Superelasticity 9, 437–446 (2023). https://doi.org/10.1007/s40830-023-00442-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40830-023-00442-0