
Abstract
Classical time-averaging interferometry technique is widely used for MEMS/MOEMS dynamic behavior investigations. It provides useful information on resonant vibration frequencies and mode shapes in the form of Bessel fringe images. To evaluate the information on objects’ vibration amplitude distribution, one needs to further process Bessel fringe images (besselograms). Among different available approaches to besselograms processing, Temporal Phase Shifting is of particular interest since it provides the most accurate results. However, it requires an additional cumbersome correction routine via specially designed look-up-tables fitted to the calculation algorithm used. In this paper, we numerically investigate the possibility of reducing Bessel images argument (phase) evaluation error by different phase shifting strategies. Two different 5 step algorithms are investigated for that purpose. Additionally, a quick and robust correction procedure based on evaluated phase distribution is presented. It allows us to speed up the calculations significantly. Moreover, such an approach is much less susceptible to noise in comparison to a look-up-table solution.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The development of microelectronics and micromechatronics technology and the mass production of micro-scale systems are the cause of increasingly high demands on the reliability of those devices. It is needed by both sides of the manufacturing chain - customers and manufacturers. The microsystems’ reliability may be achieved only by the specific feedback loop containing manufacturing processes calibration by the information gathered from the testing results. That is why testing plays a vital role in the whole manufacturing chain. The methods used for that purpose are still under consideration of many scientific and industrial R&D groups. Speed, accuracy, and simplicity and resistance to the manufacturing environment are the critical paths of seeking novel or enhanced solutions.
Within many required mechanical testing procedures, evaluating the static and dynamic objects’ parameters is of particular importance. For the static parameters, the shape, out-of-plane displacements, strain, stress may be quoted. In the case of the dynamic parameters, vibration frequencies and vibration amplitudes are of particular importance [1,2,3]. Dynamic and/or transient behavior of the system is the primary source of information on material properties as well as mechanical energy flow [1] through different components of the investigated unit. Hence it needs to be studied carefully.
Time averaging technique applied to different interferometric methods, e.g., classical interferometry, speckle interferometry, or holographic interferometry, is one of the most commonly used measurement techniques in harmonic motion testing. Depending on the method applied, different objects in micro (MEMS/MOEMS) and macro (engineering constructions, aircraft parts, or musical instruments) scale may be investigated. Time averaging allows for investigations of extremely important harmonic motion parameters - frequency and maximum amplitude of vibration under applied excitation. The information on the amplitude of vibration is encoded in the so-called fringe locus function. This function is an envelope function of carrier (interferometric fringes) and is described by the zeroth-order Bessel function of the first kind if harmonic motion is measured. To evaluate quantitative information on investigated vibration amplitude distribution, first Bessel fringe images (besselograms - fringe pattern described by zeroth-order Bessel function J0) need to be calculated. The processing of such images is further required. For this purpose, many different approaches, described in “Phase Shifting Time Averaging Interferometry” Section, were proposed. The most accurate results are obtained when using the Temporal Phase Shifting (TPS) method. However, in besselogram processing, the achieved results accuracy depends on the realized strategy of phase shifting, which contrasts with classical fringe pattern processing methods.
By far, the most common method used to introduce the time-varying phase shift in a phase shifting system is to mechanically translate one of the mirrors or optical surfaces in the interferometer with a piezoelectric transducer (PZT) [4, 5] or voice coil actuators (VCA) [6]. In the former case, these ceramic materials based devices expand or contract with an externally applied voltage. Depending on the configuration, up to a few hundred volts may be needed to obtain the required motion of a wavelength or less. By discretely changing the applied voltage, the induced phase shift varies through a series of steps. If the voltage is programmed to vary smoothly, a phase shift of a desired functional form can be produced. In voice coil actuators, the voltage applied to the voice coil produces a controllable force that pushes or pulls the magnetic rod over the desired distance. Information from the interferometric test can be used to calibrate the motion of the PZT or VCA. An alternative method for producing either a stepped or continuous phase shift is to use a tilted plane-parallel plate in the interferometer’s reference beam [7]. The optical path within the plate increases as the tilt angle is increased. To avoid aberrations introduced into the reference beam, this method may be used only with a collimated reference beam.
A different type of phase shift can be produced between the reference and test beams by introducing an optical frequency difference between these two beams (e.g., via acousto-optic modulators AOMs). If the two optical frequencies are slightly different, a fringe pattern with fringes moving with constant speed will be achieved. In such system capturing consecutive frames with adequate time delay leads to getting the set of phase shifted patterns. Another technique, allowing to obtain constantly moving fringes, employs movable diffraction gratings. When a diffraction grating is translated through a beam of light, a Doppler shift is introduced in the diffracted beams [8,9,10]. The translation direction is perpendicular to the propagation direction. The frequency shift is proportional to the diffraction order m and the velocity v, and inversely proportional to the grating period d. The undiffracted beam has no frequency shift, beams diffracted in the same direction as the translation sees a positive frequency shift, and beams diffracted in the opposite direction have their frequency decreased. One of the diffracted orders is selected, and interfered with the original frequency to produce a phase shifting interferometer.
Phase shifts can also be obtained through the use of rotating polarizers or phase retarders. Still, mechanical limitations generally limit operation to a few kilohertz, and this method is not widely used [11,12,13]. Yet another technique based on polarization optics employs electro-optic modulators (EOMs) for phase shifting purposes. These devices may be considered as voltage-controlled retardation plates. By introducing specific voltage to the crystal showing electro-optic properties such as the Pockels effect (e.g., Lithium Niobate LiNbO3), one may obtain specific phase retardation between the orthogonal polarization axis of the crystal. As a consequence, the phase shift between two interfering beams in the interferometer is obtained. The EOMs are convenient for use in phase shifting since no mechanical movement is introduced in the optical system and precise linear control of phase shift through applied voltage is obtained. Moreover, EOMs bandwidth extends to the gigahertz range, making it very much applicable for dynamic systems.
Phase Shifting Time Averaging Interferometry
Classical time averaging interferometry (TAI) is a full-field measurement method for vibrations testing. It may be realized in any classical interferometer configuration. However, most commonly, Twyman-Green or Mach-Zehnder configurations are used. The method employs continuous illumination to the vibrating sample and records the resulting fringe pattern in the time much exceeding a single vibration period. Figure 1 presents the measurement principle of TAI. The red bar at the figure shows the object’s constant illumination over the image recording time (indicated by the dotted line). During the recording time object under test runs for many oscillation cycles, which is schematically shown by a solid line. Efficiently, the TAI method may be used for measuring harmonic oscillations at a single frequency only. Mathematical solutions of TAI behavior for a larger number of frequencies, induced in the object under test, may be found in [14]. In general, from such multiple frequency measurement, the useful information on the amplitude of vibration cannot be retrieved. Some mixed techniques, involving time averaging and stroboscopic illumination, to overcome this limitation and measure vibrations for two or three simultaneous frequencies may be found in [15,16,17]. Suppose the object vibrates in more than one frequency at the same time. In that case, the vibration fringes (J0) for different frequencies appear in the image simultaneously, and it is impossible to distinguish between them while evaluating amplitude. If the structure (measured object) excitation is in the form of an impact, and all modes are induced at once, the TAI method will fail since all modes will overlap on the structure resulting in very complex fringe distribution. Moreover, impact excitation induces damped vibrations, so each mode will have descending amplitude over time, which contrasts with the methods’ fundamental requirement – constant sinusoidal motion.

The measurement principle of Time Averaging Interferometry (TAI). The red bar illustrates continuous illumination during measurement; the dotted line indicates camera exposure time, whereas the solid line shows oscillation of the single point of the investigated object
Time averaging interferometry, compared to other measurement techniques, is characterized by the extreme experimental setup simplicity and the independence to the vibration frequency value. In a sinusoidal vibration, the interferogram contrast changes are described by zeroth-order Bessel function J0. This function encodes the vibration amplitude information in its argument. The group of Bosseboeuf presented the retrieving modulus of Bessel function |J0| based on the calibration of the interferogram modulation distribution for a vibrating object by the intensity modulation distribution for the static one [18]. The FFT method was used to determine the interferogram intensity modulation. Our team proposed the temporal phase shifting (TPS) [19] as well as spatial carrier phase shifting (SCPS) [20] techniques to evaluate the intensity modulation distribution.
In general, the intensity distribution of a two-beam interferogram in the case of a static object may be written as:
where I0 is the interferogram bias; γ refer to the contrast of interference fringes (nonvibrating object); φobj is the object phase corresponding to its shape described by s(2π/λ)OPD, where OPD is the optical path difference between the beams; λ is the light wavelength, s is the interferometer configuration sensitivity coefficient. If the object starts to vibrate with specific amplitude AV, phase φV, and frequency fV, the argument of the cosine term of equation (1) may be rewritten to the form:
The intensity distribution of a two-beam interferogram in the case of the time averaged recording can be written as:
where J0 - zero-order Bessel function of the first kind. The coordinates (x,y) dependence in the equations (1)–(3) have been omitted for simplicity. Calculating the modulation distribution for the vibrating object, one can obtain |γI0J0(4πAV/λ)|. Normalizing it by the modulation of the static object |γI0| (J0 = 1, for AV = 0), the zero-order Bessel function distribution with the vibration magnitude AV (x,y) encoded in its argument can be obtained.
In the recent work [21], the first studies of the influence of discrepancies from ideal experimental conditions such as phase shifter miscalibration and changes of average intensities of component TPS frames on the contrast determination results have been presented. The interferogram contrast has been chosen for the analysis since it represents interferogram intensity modulation normalized by proper sums of intensities of recorded frames. This normalization makes contrast calculation results more susceptible to experimental errors than modulation calculation ones. In this way, better visualization of TPS algorithms characteristics can be obtained while more strict requirements on the experiment conditions must be put. On the other hand, the nonuniform intensity distribution of interferogram bias may be removed, which is crucial if the vibration’s amplitude is evaluated. For the Bessel fringe visualization practice, however, modulation calculations should be used.
For quantitative evaluation of vibration’s amplitude, a procedure similar to the phase shifting technique in conventional interferometry has been suggested [22]. In this paper, we call it Temporal Phase Shifting Time Averaging Interferometry (TPSTAI). It requires multiple phase-shifted intensity frames to be recorded. If the phase of the reference wave is modulated sinusoidally at a frequency and phase identical to the object vibration, the zero-order J0 fringe shift is similar to the case in which the phase modulation shifts sinusoidal fringes [22]. If we assume an additional modulation of the interferometer reference beam, as stated above, the equation (2) may be rewritten to the form of:
where BV is the amplitude, and φm is the phase of the sinusoidal modulation of the reference wave. If φm = φV, the equation (4) may be rewritten to the form of the fringe pattern as:
where
For φm = φV + π equation (4) is as follows:
By evaluating the Bessel fringes out of modulated fringe patterns given by equation (4) with one of the methods above, for different amplitudes BV, a set of phase shifted Bessel fringe patterns (besselograms) is obtained. Further processing of the set of besselograms by TPS algorithms leads to an evaluation of the argument of the function (Ω), which is proportional to the amplitude of vibration (see equation (6)). The information on the phase of vibration (φV) is lost due to averaging many cycles.
As stated above, the approach utilizes additional controllable modulation of the phase of the wavefront in one interferometer arm. It is usually introduced using oscillating mirrors or electro-optical modulators (Pockels cells) depending on the desired modulation frequency. Precisely controlled wavefront amplitude and phase modulation result in a controlled (and very precise) shift of the Bessel fringes’ spatial position. In this way, a set of phase shifted besselogram patterns is obtained. In most cases, each besselogram is described by the absolute value of the Bessel function (|J0|). Such absolute value distribution leads to the appearance of gradient discontinuity in the regions of function zero crossings. To avoid these troublesome areas, the squared values of the function may be used (J02). This approach allowed comparing the obtained function with the squared cosine function and evaluating the fringe phase by utilizing known temporal phase shifting algorithms. The consecutive processing step is a correction routine to minimize the errors caused by the estimation of J02 by cos2 function [22]. For this purpose, a specific numerical correction look-up table (LUT) is generated. The correction procedure covers every image pixel, hence significantly extends calculation time. Values of phase determined in the calculations (after scaling) correspond directly to the amplitude of vibration.
Strategies of Bessel Fringes Shifting
Application of the TPS technique to Bessel fringe processing requires an assumption of Bessel and cosine functions’ similarity. It is supported by the polynomial approximation of Bessel functions [23]:
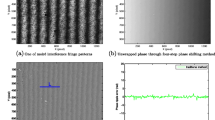
where \( u=x-\left(2n+1\right)\frac{\pi }{4} \), Pn and Qn are polynomials depending on the order of Bessel function n. For n = 0, Pn = 1 and Qn = 0. Even though besselograms may be treated as interferograms with argument dependent envelope (similar to white light interferograms), unlike in classical interferometry, perfectly realized phase shifting leads to erroneous phase distribution due to specific properties of Bessel function. That is why, in this paper, we wish to investigate the behavior of the error distribution in phase distribution evaluated using the TPSTAI method for different phase shifting strategies. We evaluated and further processed besselograms described by pure J0 function instead of its modulus and squared values in our work. This approach ensures much better SNR of processed fringe patterns (in comparison to processing besselograms described by J02 function), especially in the areas of larger amplitudes of vibration (resulting in smaller values of the fringes). Moreover, the zeroth-order Bessel function of the first kind may be approximated by cosine function with smaller discrepancy (comparing to J02), which results in smaller errors after processing. The function may be calculated by normalizing J0 absolute value by the sign of function. The function’s sign is calculated as a sign of phase differences between static and dynamic states of the measured objects. It is known that carrier fringes (interferometric fringes) are π shifted every time the modulation function (fringe locus function) goes through zero. For fast calculations, complex division technique [24] was utilized:
where
Isi, i = 1,...5 corresponds to the set of five interferograms acquired for the static (nonmoving) object, while IVi, i = 1,...5, corresponds to the set of five interferograms acquired while the object is vibrating at specific vibration frequency.
For the besselogram phase calculations, two different five frame phase shifting algorithms were chosen. The authors assumed the maximum number of acquired besselograms equal to five to assure the speed of measurement. The following formulas describe the algorithms:
where Ji, i = 1,..,5 is the consecutive phase shifted besselogram acquired in the measurement process. The authors names give the naming of algorithms for simplicity in referencing. L stands for the Larkin algorithm [25], whereas H stands for Hibino five step algorithm [26].
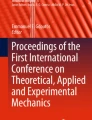
First considerations for phase shifting strategies were devoted to the case of even steps between consecutive besselograms. As the Bessel fringes localization depends on the phase distribution (vibration amplitude distribution), during numerical simulations, we have considered two different phases that may occur in real experiments: single sign phase (SSP) or dual sign phase (DSP). The single sign phase is the case of a vibrating object where vibration amplitude distribution over the entire area of the object has the same, uniform phase of vibration. This concerns mainly the fundamental out-of-plane vibration mode for the majority of mechanical objects, such as membranes or cantilevers, under test. Our research has simulated the amplitude distribution for the first out-of-plane vibration mode of a circular membrane. On the other hand, the dual sign phase is the phase distribution where vibration amplitude distribution has different signs of the phase of vibration over the different areas of the object. This concerns higher order out-of-plane vibration modes for the majority of mechanical objects. To simulate such distribution, we have simulated higher order out-of-plane vibration mode of circular membrane consisting of two minima and two maxima simultaneously. We have chosen those two modes to represent the behavior of vibrational fringe patterns only. Any other separate out of plane vibration modes that may appear at the structure will cause fringe behavior similar to one of those two investigated. The reason for analyzing only two modes is that they cover all expected behavior of the vibrational fringe patterns (J0 fringe distributions - besselograms). This behavior affects the movement of the vibrational fringes while performing phase shift. In other words, in the SSP case, the fringes experience the same type of movement all over the structure. In contrast, in the DSP case, the fringes experience different movements in different areas of the structure. For this reason, we have investigated the best possible strategy of phase shifting, to minimize the error in evaluated amplitude distribution. In Fig. 2, we present the simulated amplitude distributions together with their cross-sections through extremes.

Simulated vibration amplitude distributions (AV) on the left-hand side and corresponding cross-sections (indicated by the line) on the right-hand side for the SSP phase type (upper row) and the DSP phase type (lower row) distributions
The main aim of investigations of phase shift strategies for besselogram processing, presented within this paper, is to minimize the processing time by removing the numerical correction routine via LUT and, at the same time, maintain the reasonable accuracy of the evaluated results. In the paper, we have compared five different strategies of Bessel fringe shifting. They are gathered in Table 1, showing which of the acquired Bessel distributions is shifted with respect to the original non shifted one. In the Table α indicates the realized phase step value. It corresponds to the amplitude BV of the modulation signal in the interferometer reference arm (see equations (4)–(7)). For all considerations, equal phase steps between images were simulated.
The phase shift value was investigated in the simulations in the range of 0.5–160 deg with the step equal to 0.5 deg. For each considered phase shifting case, the error map, as a difference between simulated and evaluated vibration amplitude distributions, was calculated. Two main parameters of error map distribution were further assessed. First, the peak to valley (PV) parameter, as the difference between maximum and minimum values in the error distribution map. This parameter shows the maximum error that we may expect in the evaluated vibration amplitude map for a given phase shift value and strategy. Second, the standard deviation (SD) parameter, as the statistical parameter showing the error values’ dispersion in the error map, for a given phase shift value and strategy, was calculated. Since we expect nonuniform error distribution across the evaluated error map, the SD parameter will estimate the average error that we may expect at any point in the evaluated vibration amplitude map.
In Fig. 3, the plots of two error parameters in the phase shift value function for both considered algorithms are presented. The calculations were done for the case of single sign phase distribution. As it is well visible, the error curves’ character for both error parameters and different strategies looks similar. In general, the asynchronous Larkin algorithm performs better, especially in the 0–80 deg phase shift range. For the larger phase shift values (above 100 deg), both algorithms give similar error values. For both algorithms, the linearp phase shift strategy provides the best results. The smallest values of error SD are 0.0411 rad (α = 96 deg) and 0.0257 rad (α = 95 deg) for L and H algorithms respectively, whereas smallest error PV values are 0.152 rad (α = 103.5 deg) and 0.0925 rad (α = 100.5 deg) for the same algorithms.

The plots of standard deviation SD (first row) and peak-to-valley PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column). The case of a single sign phase
As a next step, the dual sign phase distribution was investigated. Figure 4 presents the plots of PV and SD of error distribution in the function of phase-shift value.

The plots of standard deviation SD (first row) and peak-to-valley PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column). The case of the dual sign phase
In the case of DSP phase distribution, the PV error parameter does not depend on the strategy of phase shifting (the curves coincide), but only on the phase shift value. It is worth noting that the PV values are doubled in comparison to the SSP case. As in the previous case, the Larkin algorithm performs better for the smaller values of phase shifts (up to 70 deg). The SD parameter of error distribution for different analyzed strategies shows small differences, yet the general curve shape resembles the one obtained for the SSP case. The best phase shifting strategies are the linearn and the linearp, giving nearly the same results. For the Larkin algorithm, the most accurate results are obtained for phase shifts near 0 (SD = 0.5569 rad at 1 deg), whereas for the Hibino algorithm, the minimum SD parameter (0.5797 rad) is obtained for 70 deg phase shift.
Correction Routines
As it was mentioned above, the evaluation of phase distribution out of Bessel fringe pattern using the phase shifting technique leads to erroneous distribution since Bessel and cosine functions do not coincide. In the classical approach of TPSTAI, a LUT correction was proposed to minimize the discrepancy between real fringe phase distribution and evaluated one. This procedure, however, is long and cumbersome as must be performed pixelwise. In our work, we propose much quicker and robust correction procedures based on the calculation of the fringe correction phase distribution out of the evaluated fringe phase. They are based on the observation that the largest discrepancy in phase distribution, evaluated from Bessel fringes, covers the first Bessel fringe area and gets a maximum value of around π/4. The first approach is based on an observation that the error distribution resembles the arctangent function of the real phase distribution. Therefore, we propose to calculate the correction phase distribution as:
where Ω is the unwrapped evaluated phase distribution.
The final phase distribution proportional to the amplitude of vibration, calculated using TPSTAI is:
The results of the numerical simulations conducted with the same assumptions, as in the case of no correction procedure, with the correction routine proposed by equation (17), are presented in Figs. 5 and 6, respectively. They show the PV and SD error parameter plots versus phase shift values for both considered algorithms and both phase types (SSP and DSP).

The plots of standard deviation SD (first row) and peak-to-valley PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms ( Larkin - left column, Hibino - right column) with proposed arctangent correction procedure. The case of the single sign phase

The plots of standard deviation SD (first row) and peak-to-valley PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column) with proposed arctangent correction procedure. The case of the dual sign phase
When the correction procedure is used, the best results are obtained for linearp and 1n strategies up to 60 deg. Beyond that phase shift, 1n and symmetric shifts are recommended. In general, the Larkin algorithm outperforms the Hibino one for the phase shifts not exceeding 80 deg. An important remark needs to be added. The correction procedure for the SSP phase type does not improve the general results obtained (does not lower the minimum PV and SD values). It improves the results locally, for the Larkin algorithm within the 0–50 deg phase shift range.
On the other hand, the proposed correction procedure significantly improves the results for the DSP type phase. In this case, both algorithms provide much more accurate results. As in the no correction case, the Larkin algorithm outperforms the other one for smaller values of phase shifts (up to 100 deg). Note that curves for 1n and 1p, as well as linearp and linearn, coincide.
Another curve that may be used for correction routine and minimize the error resulting from discrepancies between cosine and Bessel function is the hyperbolic tangent. Therefore, we propose another fringe phase correction calculation as:
where Ω is the unwrapped evaluated phase distribution. The final phase distribution proportional to vibration’s amplitude is calculated in the same way as with arctangent correction (see equation (17)).
The results of the numerical simulations conducted with the same assumptions as before and proposed hyperbolic tangent correction routine are presented. Figures 7 and 8 show the PV and SD plots versus phase shift value for both considered algorithms and both phase types (SSP and DSP).

The plots of standard deviation SD (first row) and peak-to-valley PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column) with proposed hyperbolic tangent correction procedure. The case of the single sign phase

The plots of standard deviation SD (first row) and peak-to-valley PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column) with proposed hyperbolic tangent correction procedure. The case of the dual sign phase
To provide a more straightforward comparison between two correction routines, differences between error values were calculated. In Figs. 9 and 10, corresponding plots versus phase shift value for both considered algorithms and both phase types (SSP and DSP) are shown. The results were calculated as error values after using the arctangent correction routine minus error values after using the hyperbolic tangent correction routine. In such an approach, all plots above zero value show that the second correction routine provides better results.

The plots of standard deviation differences SD (first row) and peak-to-valley differences PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column). The case of the single sign phase

The plots of standard deviation differences SD (first row) and peak-to-valley differences PV (second row) values versus phase shift value α calculated from error phase maps for both considered algorithms (Larkin - left column, Hibino - right column). The case of the dual sign phase
For the single sign phase and the Larkin algorithm, results are improved for three strategies (symmetric, 1p, and linearn) in the whole range of phase shifts. For the Hibino algorithm, such improvement is achieved only for symmetric strategy. There are still phase shift ranges for each strategy, where hyperbolic tangent correction outperforms the second correction routine.
For small phase shifts and linearn and linaerp strategies in the whole phase shift range for the dual sign phase, the arctangent correction routine is recommended. Hyperbolic tangent correction procedure provides the best results for symmetric strategy above 50 deg for the Larkin algorithm and above 10 deg for the Hibino algorithm. This correction routine is also better for 1n and 1p strategies for the phase shifts larger than 80–90 deg, depending on the algorithm used.
Both proposed correction routines provide better results in comparison to uncorrected ones. The SSP case’s correction processes improve the results only locally, while for the DSP case, they perform excellently for the whole range of phase shifts.
Table 2 compares the best (smallest) PV and SD error values for uncorrected and corrected phase distributions for the SSD and the PSD phase types. For each value of the error parameter, the phase shift value allowing to obtain such result is provided.
Conclusions
This work numerically investigates Bessel fringe phase evaluation’s accuracy for different phase shifting strategies in Temporal Phase Shifting Time Averaging Interferometry. The method is applied to process Bessel fringes that resembles sinusoidal fringe patterns obtained in classical two-beam interferometry. Contrary to the classical Temporal Phase Shifting technique, the phase shifting strategies analyzed within the paper influence the accuracy of the evaluated fringe phase (amplitude of vibration). Hence, the appropriate choice of the strategy leads to minimization of the fringe phase distribution evaluation errors. Additionally, simple, fast, and robust correction routines, based on preliminary evaluated and unwrapped fringe phase distribution were introduced. The correction routines show the significant improvement of the results obtained for the DSP type phases. The performed works proved that the Temporal Phase Shifting technique may be successfully applied to Bessel fringes processing providing reasonable results (PV and SD errors below λ/20) without correction routine employing Look-Up-Table. This greatly simplifies and speeds up the calculations.
Data Availability
Data and materials presented in work are available upon request.
References
Osten W (2007) Optical inspection of microsystems. CRC Press, Boca Raton
Malacara D (2007) Optical shop testing. Wiley, Hoboken
Sałbut L, Kacperski J, Styk A, Józwik M et al (2004) Interferometric methods for static and dynamic characterizations of micromembranes for sensing functions. Proc SPIE 5458:16–24
Soobitsky JA (1986) Piezoelectric micromotion actuator. U.S.Patent No. 4.577.131
Hayes JB (1989) Compact micromotor translator. US Patent 4.884.003
Kujawińska M, Józwik M, Styk A (2013) Parallel multifunctional system for MEMS/MOEMS and microoptics testing. In: Harding K (ed) Handbook of optical dimensional metrology. CRC Press, Boca Raton, pp 451–480
Wyant JC, Shagam RN (1978) Use of electronic phase measurement techniques in optical testing. Proceedings of ICO-11, pp 659
Suzuki T, Hioki R (1967) Translation of light frequency by a moving grating. J Opt Soc Am 57:1551–1551
Stevenson WH (1970) Optical frequency shifting by means of a rotating diffraction grating. Appl Opt 9:649–652
Bryngdahl O (1976) Heterodyne shearing interferometers using diffractive filters with rotational symmetry. Opt Commun 17:43–46
Crane R (1969) Interference phase measurement. Appl Opt 8:538–542
Bryngdahl O (1972) Polarization - Type Interference Fringe Shifter. J Opt Soc Am 62:462–464
Sommargren GE (1975) Up/down frequency shifter for optical heterodyne interferometry. J Opt Soc Am 65:960–961
Gupta PC, Singh K (1975) Characteristic fringe function for time-average holography of periodic nonsinusoidal vibrations. Appl Opt 14:129–133
Vikram CS (1974) Stroboscopic holographic interferometry of vibration simultaneously in two sinusoidal modes. Opt Commun 11:360–364
Vikram CS, Bose G, Maggo JN (1975) Combination of time-average and stroboscopic techniques in holographic interferometry of sinusoidal vibration. Nouv Rev Opt 6:55–59
Vikram CS (1994) Study of vibrations. In: Rastogi PK (ed) Holographic interferometry. Springer, Berlin, pp 293–318
Bosseboeuf A, Petitgrand S (2003) Application of microscopic interferometry techniques in the MEMS field. Proc SPIE 5145:1–16
Patorski K, Styk A (2006) Interferogram intensity modulation calculations using temporal phase shifting: error analysis. Opt Eng 45:085602
Styk A, Patorski K (2007) Analysis of systematic errors in spatial carrier phase shifting applied to interferogram intensity modulation determination. Appl Opt 46:4613–4624
Patorski K, Sienicki Z, Styk A (2005) The phase shifting method contrast calculations in time averaging interferometry: error analysis. Opt Eng 44:065601
Stetson KA, Brohinsky WR (1988) Fringe - shifting technique for numerical analysis of time-average holograms of vibrating objects. J Opt Soc Am A 5:1472–1476
Magnus W, Oberhettinger F, Soni RP (1966) Bessel functions. In: Magnus W, Oberhettinger F, Soni RP (eds) Formulas and theorems for the special functions of mathematical physics. Springer, Berlin Heidelberg, pp 65–151
Burke J, Helmers H (1998) Complex division as a common basis for calculating phase differences in electronic speckle pattern interferometry in one step. Appl Opt 37:2589–2590
Larkin KG (1996) Efficient nonlinear algorithm for envelope detection in white light interferometry. JOSA A 13:832–843
Hibino K, Oreb BF, Farrant DI, Larkin KG (1995) Phase shifting for nonsinusoidal waveforms with phase-shift errors. J Opt Soc Am A 12:761
Funding
This work was supported, in part, by the National Science Center under grant no. 2012/07/B/ST7/01365 and statutory funds.
Author information
Authors and Affiliations
Contributions
A.S. contributed to the conceptualization of work, writing, organization, and supervision of the manuscript; H.DB. performed all numerical results and contributed to manuscript writing; All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare no conflict of interest.
Code Availability
The works were done using self-written scripts in Matlab. The authors may provide the used scripts upon request.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Styk, A., Dziubecka - Bala, H. Phase Shift Strategies in Phase Shifting Time Averaging Interferometry. Exp Tech 45, 363–375 (2021). https://doi.org/10.1007/s40799-020-00427-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40799-020-00427-z