
Abstract
In this article, the dynamics of a double-acting pneumatic actuator was experimentally studied. To understand the details of dynamics and provide experimental data for further modeling and numerical simulation of actuators, a special test bench was designed. The bench includes a high-resolution linear encoder as well as a dSPACE 1104 data acquisition board, that permits high-frequency sampling to identify important features in the measured data at different source pressures; it also incorporates two pressure sensors, a solenoid valve, a push button, and a measuring interface to automate the acquisition of data. High precision measurements of the time of displacement and position of the moving elements, piston rod or cylinder body, allowed us to calculate velocity and acceleration. We found that the velocity of the moving element is near constant in a major part of the stroke. The recording of the dynamics of upstream and downstream pressures in the pneumatic cylinder chambers at different source pressure levels permitted us to calculate the force exerting by the piston and to explain the kinematics of the moving element. The matching of the upstream and downstream pressure plots with the displacement of the moving element allowed us to establish the instant when the moving starts, and this way evaluates such an important feature as the static friction force between the piston and cylinder body. Various scenarios were used in the experiments, including the fixing of the piston rod, which allow the cylinder body to move or vice versa, the horizontal or vertical position of the pneumatic cylinder and the forward or backward stroke movement. The results obtained with the proposed experimental bench provide essential information on the dynamics of a double-acting pneumatic cylinder that can be included in the mathematical model of the cylinder and used in mobile robotics.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Pneumatic cylinders are fundamental elements both in robotics and factory automation; they are used in many industrial devices because of the advantages they offer, including low cost, easy maintenance, the great force they exert and easy assembling. As compressed air is available in almost any industrial installation, pneumatic cylinders and valves have become competitive in many applications such as motion control of materials, gripper devices, robotics, industrial processes, and food processing among others. That is why the study of the simulation and control models of these actuators has become a relevant subject.
Robotics is a field where pneumatic cylinders are of special interest. Particularly, the inspection and maintenance of mobile robots known as pipe-crawlers are currently being investigated [1, 2]; a special kind of these robots is using the inchworm like motion. These robots use the extension and contraction of the active element of pneumatic cylinders to move. To complete one step either forward or backward, inchworm like robots have to extend or contract the rod or the cylinder body.
Precise control of the force and position of pneumatic actuator is a complex problem since it involves nonlinear thermodynamic processes like friction between the piston rod and its seals, the air compressibility, airflow through the controlling valves, as well as an air transmission delay because of the connecting tubes length [3,4,5,6]. The introduction in paper [4] is a good tracking through the works dedicated to the development and study of mathematical models of a pneumatic system with linear and nonlinear controllers of the position or force.
A detailed mathematical model for a pneumatic actuator controlled by a proportional valve was proposed in [4]. The model considers ”the friction in piston seals, the difference in active areas of the piston due to the rod, inactive volume at the ends of the piston stroke, leakage between chambers, valve dynamics and flow nonlinearities through the valve orifice, and time delay and flow amplitude attenuation in valve-cylinder connecting tubes”. However, specially designed experiments are needed to identify the unknown characteristics of the pneumatic system. The model depends on experimental values, making its application difficult to other systems.
These considerations were taken into account in order to develop a mathematical model for piston rod partial displacement in a forward direction without pressure on the opposite chamber. Their results exhibit a sigmoid-like morphology of the pressure plots, which, under the previously mentioned conditions, they are correct, but in industrial applications pneumatic cylinders are used in on-off stroke position.
The Authors [7,8,9] have also developed interesting mathematical models matching computer simulations in conditions coinciding with those mentioned in the previous work, in that, the dynamics consider a partial motion of the piston rod, and the upstream pressure is in one chamber at a time.
Important contributions to the models of pneumatic actuator control in [8, 10], are focused only in position control, ignoring pressure dynamics in the cylinder chambers which affects this position. Tests for measuring friction between the piston and the cylinder body as well as the piston rod and its seals, using potentiometers to measure the position of the piston, have been designed in [4, 11]. The use of potentiometers adds momentum, additional friction and noise that affect the results.
In order to obtain pressure and position data, experimental tests implemented in [12], also involve potentiometers. Most of the experiments are designed to study the piston rod displacement in horizontal position [4]. To the best of our knowledge, none of the works, concerning mathematical models, and experimental tests for obtaining parameters and dynamical characteristics of a double-acting pneumatic cylinder, consider the movement of the cylinder body, which is important in inchworm like mobile robots. Some of the works lack the precision needed to visualize various details regarding pressures, dynamical forces, and piston displacement time. In most of the trials, the sampling rate at tenths or hundredths of a second is used; which does not permit to observe relevant details of dynamic characteristics of a double-acting pneumatic actuator.
The details are important to feed the design of a computer pipe-crawler robot simulator. This type of real-time simulation requires a simpler and confident mathematical model to reproduce the main characteristics of a pneumatic actuator dynamics than that proposed in [4]. Thus, the goal of this paper is to study the dynamics of a double-acting pneumatic actuator and provides higher precision experimental data of the main dynamic characteristics obtained in an experimental setup specially designed for this purpose. A variety of scenarios not reported in earlier works are analyzed in view of application to the inchworm like pipe-crawlers. The dynamic behavior of active elements, both the piston rod and cylinder body, is analyzed. The main state variables to consider are active element displacement and cylinder chambers pressures as a function of time. The pneumatic cylinder is examined at various source pressures. Tests are done changing the cylinder orientation, placing the cylinder horizontally and vertically.
This paper is organized as follows. In Section “Mathematical Model of Pneumatic Cylinder” we analyze a mathematical model of a double-acting pneumatic cylinder, in order to design an appropriate experimental methodology. Section “Proposed Methodology and Experimental Set-Up” describes the experimental setup, and the way tests were done. Experimental results are presented in Section “Experimental Results.” In Section “Conclusion” we present conclusions of this work. Contributions and highlights of this paper are shown in discussion Section “Discussion”.
Mathematical Model of Pneumatic Cylinder
In our opinion, the most detailed mathematical model for double-acting cylinders was proposed by Richer and Hurmuzlu [4]. Based on the mentioned work Dihovicni [7] developed a simulation and animation of double-acting pneumatic cylinders controlled by proportional spool valves. Here, we present a summary of this mathematical model to show its complexity and to propose the methodology and set-up for an experimental study of a pneumatic actuator using the notations of [7] mainly. The equation of piston motion is given by [4]:
where x represents the rod position (m); P1 and P2 are the pressures in cylinder chambers 1 and 2, respectively (kPa); Pa defines the atmospheric pressure (kPa); Ar represents the rod transverse area (m2), A1 is the piston area in chamber 1 (m2); A2 is the area of the rod in chamber 2 obtained as A2 = A1 − Ar (m2); ML represents the load mass (kg); Mp represents the rod mass (kg); β is the cylinder viscous friction (Kg/s); Ff denotes the Coulomb friction (N); and FL represents the external force (N). Figure 1 shows the main parts of the double-acting pneumatic cylinder (equation (1)) and Fig. 2 displays a free body diagram of the piston and the rod, where it shows the forces described in equation (1). In this free body diagram, FL and Fp represent the forces generated by the masses of the load and the rod, respectively; Fβ is the force produced by the viscous friction. In the case of the force represented by the term PaAr∗, the symbol ∗ is to describe that if the rod does not have a load, the rod transverse area is only considered, otherwise it is considered the area of the load. Note that the forces are represented by dot arrows FNp and FNr, which constitute the moment of inertia of the piston and the rod, respectively. As it is explained in [13], it is assumed that the weight and the moment of inertia corresponding to the piston and the rod are small, causing negligible normal forces FNp and FNr. The reason for this comes from the idea that the useful axial force on the rod FL should be much greater than the weight of the pneumatic cylinder. However, it is added the representation of the angle α (deg), which is the inclination of the pneumatic cylinder, this is in order to obtain the components FNpx, FNpyFNrx, and FNry. The other terms of forces (P1A1, P2A2, Ff, and FL) clearly match with the terms of equation (1).

Scheme of a double-acting pneumatic cylinder

Free body diagram of the piston and rod
The equations of pressure dynamics take into account different characteristics of heat transfer in the processes of charging and discharging, compression or expansion of air resulting from piston movement, effective areas on the opposite sides of the piston and the inactive volume at the end of the piston stroke and admission ports. Then, differential equations to model chamber pressures are given by [4]:
and
where:
R = 8.3144 LkPa/(Kmol) is the ideal gas constant
T is the temperature (oK)
α, αin, and αex take values between 1 and k (heat specific index), depending on the actual heat transfer during the process; the recommended value for upstream/downstream α = 1.2, see [14]
\(\phi =e^{\left (-\frac {R_{t}RT}{2P}\frac {L_{t}}{c} \right ) }\) is the air flow attenuation component in the connecting tubes with:
Lt as the tube length (m)
c constitutes the sound velocity (343.2m/s)
P represents the final pressure (kPa)
\(R_{t}= 0.158\frac {\mu }{D^{2}}Re^{3/4}\) is the tube resistance (Re Reynolds number) with:
μ is the dynamic viscosity of air (N/sm2)
D constitutes the inner diameter of the tube (m)
Re is the Reynolds number (kPa)
Cf is the discharge coefficient
\(\bar {A}_{v1_{in}}\) as the effective area of one path in the proportional valve (\(A_{v_{in}}\) exhaust path, \(A_{v_{ex}}\) input path). Taking the piston origin displacement at the middle of the stroke, the volume in each chamber can be expressed as:
\(V_{i}=V_{0i}+A_{i}\left (\frac {1}{2}L\pm x\right )\), with i = 1,2 as the cylinder chamber index
V0i is the inactive volume at the end of the stroke and admission ports
Ai represents the effective piston area for each chamber
\(\dot {m_{r}}\) is the flow function
Pi, i = 1, 2 is the absolute pressure in the corresponding cylinder chamber (kPa)
Ps represents the source pressure (kPa)
L is the piston stroke (m)
x as the piston position (m)
The valve model involves the spool valve dynamics and the mass flow through the variable orifice of the valve. Using a force-current expression for the coil gives the equation [4]:
where Ms is the spool and coil assembly mass (kg), xs is the spool displacement (m), cs represents the viscous friction force (Ns/m), Ff constitutes the Coulomb friction force (N), ks is the spool spring constant (N/m), Kfc represents the coil force coefficient (N/A), and ic is the coil current (A).
The complicated nonlinear system of four coupled equations (1)–(4) describe the pneumatic system. We see that the mathematical model contains several adjusting and experimental parameters; those are specific and have to be measured experimentally for a particular application. Although the numerical solution of the model was found in a good agreement with the experimental results for special initial conditions, the experimental manner in which it was analyzed, is not the way that pneumatic cylinders are usually used in the industry [4]. Because of this, we propose the experimental study of the pneumatic cylinder characteristics in order to find out important features to develop a simpler functional model that can be used in a computational simulator implemented in real time.
Proposed Methodology and Experimental Set-Up
It is easy to see that in practical use of an actuator the most important state variables are the force, displacement, speed, and pressures in the cylinder chambers of an actuator as a function of time, attached to the displacement mode of both the piston rod and the cylinder body with different orientation of the actuator. As exposed above, the experimental set-up must be able to register the position of the mobile element of the actuator, pressures in the cylinder chambers and time with high precision.
Experimental Set-Up
Figure 3 depicts the experimental platform designed and constructed in this work. The test bench allows to orient the pneumatic cylinder vertically and horizontally, using whether the rod or the cylinder body as the moving element. This scheme, used in typical industrial applications, permits to analyze the behavior of the pneumatic cylinder in near real conditions. Special care was taken to avoid friction force from external elements and vibrations in assembling components. Besides, a particular construction design was implemented to achieve the fine alignment of the incremental encoder. The scheme of the test bench is represented in Fig. 4.

Double-acting pneumatic cylinder test bench used in experiments

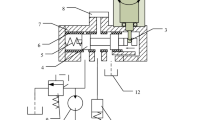
The scheme of the test bench used in the double-acting pneumatic cylinder experiments
The system components implemented in the test bench with their characteristics are as follows:
Numatics®;double-acting pneumatic cylinder, model 0750 D02-03A, where the cylinder body has a diameter of 3/4”, the rod has a diameter of 1/4” and a stroke length x = 3”. Measured areas are A1 = 0.00028353 m2 and A2 = 0.00025186 m2
Two Freescale semiconductor sensors model MPX5700, to measure P1 and P2 pressures in both cylinder chambers.
Avago 630-HEDS-9731-252 optical encoder to measure the displacement of the rod or the cylinder body.
5/2 FESTO solenoid valve in order to control the pneumatic cylinder.
24 volts push button to activate the 5/2 solenoid valve.
dSPACE DS1104 data acquisition board with RTI interface for signal visualization.
Measuring interface consisting of two optocouplers, resistors, and ceramic capacitors.
3.5 HP air compressor.
A power source.
An air distributor.
The source pressure Ps of the pneumatic system is calibrated by the regulating valve of the maintenance unit according to the pressure needed for different trials proposed, which will be described in Section “Design of Experiment”. The push button is used to change the position of the solenoid valve, that changes the direction of the compressed air so that the moving element of the pneumatic cylinder displaces to the desired position. Two MPX5700 sensors are used to measure pressures P1 and P2; these sensors are placed 5 cm away from each piston chamber. The sensors send analog voltage to the dSPACE 1104 data acquisition board according to the difference between atmospheric and chambers pressures. A linear optical encoder is employed to measure the displacement of the pneumatic cylinder moving element, which is connected to the incremental encoder interface of the dSPACE 1104 data acquisition board. This encoder has a resolution of 300 lines per inch and is fixed at the end of the moving element with an accessory to hold it aligned with the code strip. Contrary to other works on this topic, we use a linear encoder in order to avoid friction and mechanic momentum. Another benefit of using an encoder is to have a more accurate displacement measurement of the moving element. Real-time recording of data is done by Simulink/MATLAB with ControlDesk software.
Design of Experiment
Four series of tests were implemented, two series with the cylinder in a vertical orientation and the other two in a horizontal orientation. In each series, the source pressure is manually adjusted to each of the three levels: 200 kPa, 400 kPa and 500 kPa. At each orientation, the piston rod or the cylinder body is fastened to the platform of the setup. When the piston rod is fixed, the moving element is the cylinder body, and when the cylinder body is fixed the active element is the rod. Each test under the same conditions was repeated 45 times in order to check the repeatability of the experimental data and validate them statistically. The orientations of the cylinder are shown in Table 1 and are described as follows:
- 1.
Horizontal orientation of the pneumatic cylinder.
- (a)
The active element is the rod of the pneumatic cylinder
- (b)
The active element is the cylinder body
- (a)
- 2.
Vertical orientation of the pneumatic cylinder.
- (c)
The active element is the rod of the pneumatic cylinder
- (d)
The active element is the cylinder body
- (c)
In each test, we measure the active element displacement and the pressures of both cylinder chambers (upstream and downstream) as a function of time. Pressure sensors were placed as close to the chambers as possible to try to diminish the latent time due to the length of the connecting tubes. The experimental signals were synchronously sampled each 0.1 ms. The displacement data were filtered with a MatLab function called smooth to eliminate high-frequency noise and fit with the smoothingspline function of MatLab, in order to calculate the velocity (\(\dot {x}\)) and acceleration (\(\ddot {x}\)). Velocity and acceleration of the rod and cylinder body were calculated by means of the first and second displacement derivative, respectively. A push button is used to actuate the solenoid valve. The incremental encoder permits to measure the displacement up to 85 μm. The sensitivity of pressure sensors is 6.4 mV/kPa.
Experimental Results
In experiments, we measured as functions of time chamber pressures and displacement of the moving element (piston rod or cylinder body) of the double-acting pneumatic cylinder at three source pressures: 200, 400, and 500 kPa. in each of the two positions of the actuator, horizontal and vertical. The experimental signals were synchronously sampled each 0.1 ms. Displacement as a function of time is derived once or twice provide us with the velocity or acceleration of the moving element. Each experiment has been repeated 45 times under identical experimental conditions in order to obtain statistically validated results.
Total Displacement Time
We consider as the reference point (zero time), the instant when the button is pressed to activate the solenoid valve. From this instant, the displacement time of the moving element is counted at different source pressures Ps. That way we can compare both active and latent phases in the displacement times. The latent phase is the interval between zero time and the instant when the active element starts moving (velocity becomes nonzero). The active phase is the time interval between the end of the latent phase and the instant when the inclined line of displacement time crosses by the first time the horizontal line of the final steady state of the moving element. Figure 5 shows the plots of the displacement times at 200, 400, and 500 kPa as the source pressure Ps, where the moving element is the piston rod going in the forward direction in the cylinder placed horizontally. Under these conditions, we see that the latency time is 0.026 s for Ps = 400 and 500 kPa, being 0.029 s for Ps = 200 kPa (see Fig. 6 also). The displacement times in the active phase of the piston are 0.0814, 0.07069 and 0.06739 s for Ps = 200, 400, and 500 kPa, respectively, obtained by subtracting the time of the latent phase from the time of the active phase.

Piston rod position vs. displacement time at Ps = 200, 400 and 500 kPa

Piston rod velocity at source pressures Ps = 200, 400 and 500 kPa
When the piston rod reaches the end of the cylinder body, underdamped behavior is observed in Fig. 5 (see Fig. 6 also). This is due to the encoder fixed over the 2 mm metal sheet that is not perfectly rigid, and the compression-decompression of air in the inactive volume at the end of the piston stroke. In the processing of data, the end of total displacement is registered as the cross point of the horizontal line, which marks the final steady state of moving element, with the inclined line before the underdamping starts. This way the underdamped vibration is excluded and does not affect the calculating of the effective displacement time. It is also important to notice that the inner end of the cylinder physically avoids that the piston rod keeps on moving. As we see in Fig. 5, the amplitude of underdamped oscillations becomes larger when the source pressure decreases because the force resisting the backward moving of the piston decreases also.
Table 2 presents the average displacement times in the active phase of the moving element under different conditions realized in experiments: source pressure Ps = 200, 400, and 500 kPa, horizontal and vertical cylinder position, forward and backward direction of movement of the piston rod or cylinder body as the moving element. Each datum is the average over the 45 trials under the same experimental conditions (same moving element, direction, and position). As the expected tendency we observe that the displacement time decreases when the source pressure increases. In the horizontal position of the actuator, forward and backward displacement times of the moving element, being piston or cylinder, are almost equal, having larger differences in the vertical position of actuator due to the action of gravitational force. The effect of gravitational force is also observed in that the forward and backward displacement times in the horizontal position of the actuator are in between upward and downward displacement times in the vertical position of the actuator. Note that the gravitational force is relatively small compared to that produced by the compressed air at source pressures Ps = 200, 400, and 500 kPa.
Velocity and Acceleration
The time and displacement recorded in experiments are used to calculate corresponding velocities and accelerations deriving displacement over time once or twice; the respective plots are presented in Figs. 6 and 7. For source pressures 400 and 500 kPa, the plots of velocity and acceleration are analogous since the relative difference of source pressures is not large. Those differ notably in case of Ps = 200 kPa due to the large relative difference in source pressures. The piston is pushed out at large source pressures, 400 and 500 kPa, first reaches the velocity larger than the average velocity in the middle part of the stroke and then suffers local deceleration because of the partial air compression in the chamber 2 (a kind of booting back).

Piston rod acceleration at Ps = 200, 400 and 500 kPa
At the end of the stroke, we observe significant velocity fluctuations up to 50% of the average velocity in the case of Ps = 200 kPa. This is mainly due to the compression-decompression of air in the inactive volume of the cylinder at the end of piston stroke. This fluctuation does not affect the total displacement of the moving element, piston or cylinder. Moreover, even the velocity fluctuation is notable, this is the result of fast but small amplitude vibrations. In the mean part of the stroke, the velocity of the moving element can be considered as a constant approximately.
Pressures and Forces
Pressure dynamics in cylinder chambers provides dipper insight into the kinetics of a piston or cylinder body. Pressures in the chambers of the pneumatic cylinder in horizontal and vertical position were measured all time along with the moving element forward and backward displacement, at three source pressures Ps = 200, 400, and 500 kPa. In these trials, the pressures P1 and P2 are measured dynamically in respective chambers 1 and 2, as shown in Fig. 1. Figure 8 shows the plots of chamber pressures when piston rod moves forward in horizontal position of cylinder at Ps = 200, 400 and 500 kPa. An analogous morphology is observed between the curves of pressure P1 in chamber 1 at different source pressures, the same is true for pressure P2 in chamber 2 for the three source pressures. A small latent time of about 0.013 s is observed after pushing the button of regulating valve. Then the pressure P2, starting from the source pressure, is gradually decreasing, except small fluctuations at the very beginning. The behavior of P1 is not so trivial. After the latency, the pressure P1 begins increasing up to the local maximum that is less than the respective source pressure. After passing its maximum the pressure P1 starts decreasing gradually till the end of the stroke, generally following in parallel the decreasing pressure P2 but remaining larger than that. Since the difference between the pressures P1 and P2 maintain near constant, the velocity of the piston rod is nearly constant also. This is the general behavior of chamber pressures in both forward and backward displacement of the moving element, the latter being the piston rod or cylinder body (see Figs. 9 and 10, also). Note that the piston rod (the moving element, in general) starts moving when the difference of the forces exerted by the two pressures, P1 and P2, on both sides of the piston overcomes the static friction force (we discuss this later).

Chamber pressures at Ps = 200, 400 and 500 kPa

Chamber pressures and displacement of piston rod at Ps = 400 kPa in horizontal position of cylinder; a forward and b backward movement

Chamber pressures and displacement of cylinder body at Ps = 400 kPa in horizontal position of cylinder; a forward and b backward movement
To see similarity or difference in forward-backward dynamics of the moving element, either piston rod or cylinder body, in Figs. 9a, b and 10a, b we present plots of chamber pressures and displacement of the respective moving element (dashed lines) for Ps = 400 kPa. We observe that in the case of forwarding displacement the difference between pressure plots P1 and P2 is always less than that for the backward one, no matter the moving element is a piston rod or a cylinder body. That is because of A1 > A2. To prove this, we proceed the following way. The velocities of forward and backward displacements are equal approximately. So, we can consider dynamic friction forces to be equal also,
in almost all the trajectory of the moving element. Here (P1 > P2) and (\(\bar {P_{1}} < \bar {P_{2}}\)) are chamber pressures in the forward and backward displacement respectively. Then, because of A1 > A2, we get
That is the result we have observed in our experiments, see Figs. 9a, b and 10a, b as an example.
The instant when the moving element begins displacement is marked by a small solid square on pressure plots, Figs. 9 and 10. In this precisely instant the difference of forces exerted by the pressures on both sides of the piston is exactly equal to (infinitesimally greater than) the static friction force between the piston and the cylinder body. In order to understand better the details of construction, we have cut off the double-acting pneumatic cylinder used in the trials. Its interior, in particular, the trapezoidal profile of the piston seals, is shown in Fig. 11.

Inside of the pneumatic cylinder used in the trials. The picture shows the trapezoidal piston seals and the air cushion camera in the rear cylinder head
Because of the specific skirt-like shape of seals, the static friction force depends on the source pressure, in general. In addition, the static friction force corresponding to the forward displacement is not expected to be equal to that for the backward displacement. So, the friction force is calculated as
for the forward or backward displacement respectively, where Pi and Ai (i = 1,2) are the pressure and the area on the respective side of the piston; Pi is measured at the instant when the moving element starts displacement. This is the way one can evaluate the static friction force experimentally of a specific pneumatic cylinder. Experimental data obtained under different conditions and showed in Table 3 demonstrate that the static friction force increases when the source pressure does.
Conclusion
New experimental setup and the methodology of experiments were designed for studying double-acting pneumatic actuators. The use of the high-resolution linear encoder, as well as a dSPACE DS1104 data acquisition board with the high-frequency sampling of data, permitted us to identify important features in the dynamics of chamber pressures and displacements of the moving element. The detailed simultaneous recording of principal state variables such as chamber pressures, displacement of moving element and time of displacement was done systematically in our experiments. Keeping in mind the application of these actuators to the mobile robotics, particularly, the inchworm like pipe crawlers, we experimented with the double-acting pneumatic cylinder in its horizontal and vertical positions, using the piston or cylinder body as a moving element along with the forward or backward stroke movement at different source pressures. In these trials, we have found that in the vertical position of the pneumatic cylinder the gravitational force has relatively small, if not negligible, influence on the moving element dynamics at the source pressures used in the experiments. The static and dynamic friction forces of piston seals with the cylinder body are cumbersome and difficult to describe variables of pneumatic systems because of inherent uncertainties and particularities; to overcome this difficulty we proposed and tested the dynamic technique to evaluate these forces in experiments through the simultaneous measuring of chamber pressures and the displacement of moving element. Manufacturers and the current literature do not present any explanation of the morphology of pressures curves found in this work. This paper is a contribution to overcome this lack, through the presentation of different chamber pressure curves at various source pressures, placing the pneumatic cylinder in both horizontal and vertical position, and fixing the piston rod or the cylinder body in order to let the opposite element be moving. All the pressure curves obtained in trials, using the pneumatic cylinder in a cyclic on-off manner, present the same morphology. The results obtained with the proposed experimental bench provide essential information on the dynamics of a double-acting pneumatic cylinder that has to be taken into account in the mathematical modeling of the cylinder and used in the simulation of mobile robotic devices.
Discussion
The double-acting pneumatic cylinder being an extremely useful and widely used device in the field of automation of industrial processes and robotics. Its position and force precise control remains a difficult objective. Complicated high-nonlinearity general models of a pneumatic system are used to design the appropriate controllers. The drawback of these models is the high complexity of the control law and the need of some specific parameters to be evaluated experimentally in order to be applicable to a particular system; that is because of the inherent uncertainties and particular features of each pneumatic cylinder. Another complication seen in the application of a pneumatic cylinder is a variety of conditions it is used. So, the reduced order mathematical models and controllers combined with the previous experimental identification of a class of pneumatic actuators could be an alternative to this approach. This is the motive of the work done. The results presented in this paper constitute an alternative to making parametrization of the pneumatic cylinder, which could allow the developing of a simpler but still accurate and practical mathematical model. Such a mathematical model could be used in numerical simulation and control of actuators in the field of mobile robotics, specifically, in the industrial inspection with the help of inchworm like pipe-crawlers. Additionally, most of the actuators, if not all of them, have an analogous design. So the physics of motion depends little on it, and the morphology of the pressure curves and time dependence of the displacement is hardly expected to be changed; that could be a question of numbers. The results can change quantitatively but will still be valid qualitatively, then, the methodology proposed could be used in a wide range of pneumatic cylinders.
References
Brunete A, Hernando M, Gambao E (2004) Drive modules for pipe inspection microrobots. In: International conference on mechatronics and robotics
Ono M, Hamano T, Kato S (2002) T-3-3-2 development of an in-pipe inspection robot movable for a long distance. Proc Asian Conf Multibody Dyn 2002:255–258. https://doi.org/10.1299/jsmeacmd.2002.255
Pearce M (2005) Is there an alternative to fluid power? [electrically driven linear motion technology]. Comput Control Eng J 16(2):8–11. https://doi.org/10.1049/cce:20050201
Richer E, Hurmuzlu Y (2000) A high performance pneumatic force actuator system: Part i-nonlinear mathematical model. Transactions-American Society of Mechanical Engineers Journal of Dynamic Systems Measurement and Control 122(3):416–425
Richer E, Hurmuzlu Y (2000) A high performance pneumatic force actuator system: Part ii-nonlinear controller design. Transactions-American Society of Mechanical Engineers Journal of Dynamic Systems Measurement and Control 122(3):426– 434
Saravanakumar D, Mohan B, Muthuramalingam T (2017) A review on recent research trends in servo pneumatic positioning systems. Precis Eng 49:481–492. https://doi.org/10.1016/j.precisioneng.2017.01.014. http://www.sciencedirect.com/science/article/pii/S0141635916302574
Dihovicni D, Medenica M (2011) Mathematical modelling and simulation of pneumatic systems. In: Advances in computer science and engineering. InTech
Geleževičius V, Grigaitis A (2006) Investigation of dynamic behaviour of nonlinear electropneumatic acting system. Elektronika ir Elektrotechnika 68(4):35–40
Mohd monis Piyush Saena NA (2017) Development and experimental analysis of two stroke double cylinder engine operated by compresed air international. J Curr Sci Res 4(5):120–124
Mustafa ND, Faudzi AAM, Abidin AFZ, Osman K, Suzumori K (2013) Generalized predictive controller using bat algorithm for double acting pneumatic cylinder. In: 2013 IEEE student conference on research and developement, pp 572–576, DOI https://doi.org/10.1109/SCOReD.2013.7002657, (to appear in print)
Oladapo BI, Balogun VA, Adeoye AO, Olubunmi IE, Afolabi SO (2017) Experimental analysis of electro-pneumatic optimization of hot stamping machine control systems with on-delay timer. J Appl Res Technol 15(4):356–364
Gentile A, Giannoccaro N, Reina G (2002) Experimental tests on position control of a pneumatic actuator using on/off solenoid valves. In: 2002 IEEE International conference on industrial technology, 2002. IEEE ICIT’02, vol 1. IEEE, pp 555–559
Lara-López A, Pérez-Meneses J, Colín-Venegas J, Aguilera-Gómez E, Cervantes-Sánchez J (2010) Dynamic analysis of pneumatically actuated mechanisms. Ingeniería mecánica, tecnología y desarrollo 3(4):123–134
Al-Ibrahim A (1991) Transient air temperature and pressure measurements during the charging and discharging processes of an actuating pneumatic cylinder. University of Wisconsin–Madison. https://books.google.com.mx/books?id=oaxKAAAAMAAJ
Acknowledgements
The authors thanks CONACYT (México) and Centro Universitario de los Lagos, Universdad de Guadalajara.
Authors’ Contributions
M. Jiménez Gutiérrez performed the experimental tests, provided overall research objectives for the research work and wrote the manuscript. E. Kurmyshev proposed the research idea, improved the full text of English writing, and performed theoretical research and data analysis. Carlos E. Castañeda provided good experimental conditions, assisted with the reliability of the experimental tests and also wrote the manuscript. All authors read and approved the final manuscript.
Funding Information
Supported by CONACYT (México) under scholarship number 27842 and to retention program 120489. Centro Universitario de los Lagos, Universidad de Guadalajara, project PIFI-2011-14MSU0010Z-17-04.
Availability of data and material
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that they have no competing interests
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jiménez, M., Kurmyshev, E. & Castañeda, C. Experimental Study of Double-Acting Pneumatic Cylinder. Exp Tech 44, 355–367 (2020). https://doi.org/10.1007/s40799-020-00359-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40799-020-00359-8