
Abstract
Ensuring a widely safe operational profile of naval vessels is one of the leading aspects of the design process. With reference to weather conditions, this kind of vessels often cannot avoid heavy situations to guarantee the continuity and the effectiveness of service. For this reason, an applied research investigation aimed to define guidance in operations is deemed as a worthwhile activity. In particular, the performance in waves under the perspective of intact stability has been considered in this work. The IMO second-generation intact stability criteria have been identified as a suitable tool for these investigations: as a result, there is evidence that operational guidance can be developed for a set of representative naval vessels, following the relevant guidelines. Outcomes have been represented by means of comprehensive polar diagrams addressing the intact stability failures modes. Bearing in mind the actual operational profile, results have been analysed and discussed considering how ship and operating decisions in a seaway condition may affect the performance in terms of ship stability.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
During the ship design stages, motions in waves are traditionally studied by an experimental investigation that in the recent decades has been integrated with seakeeping numerical tools. These numerical tools are mainly based on linear assumptions in the frequency domain neglecting fluid viscosity. However, investigations on ship motion in waves are conventionally focussed on vertical motions, e.g., pitch and heave, since they are characterized by motion amplitudes compatible with state-of-the-art numerical tools reliability. In this context, roll motion has always represented a special problem since it may be characterized by large amplitude and several non linearities.
On the other side, the ship stability assessment, during the ship design stages, is traditionally carried out fulfilling rules requirements that are based on static equilibrium conditions in calm water. The ship dynamic behaviour in waves under the effects of wind is tackled with, in some way, by the so-called weather criterion based on energy balance method between the beam wind and righting moment. Recently, the need to address the stability in waves characteristics of the ship making reference to a more physically-based approach has been pointed out in the rule-making environment. In this perspective, the Second Generation Intact Stability criteria (SGISc; IMO 2020) have been finalized at International Maritime Organization (IMO) with a strong performance-oriented structure as highlighted by Belenky et al. (2008). The innovative nature of SGISc is provided also by the attention to the operational life of the ship besides the assessment carried out during the design phase. Due to their operational profile, naval vessels are requested to have suitable performances in extreme environmental conditions. A reliable prediction of such behaviour is recognized to be important as well as challenging: capturing the phenomena non-linearities implied by large amplitudes and identifying appropriate performance-based criteria are some aspects of the issue (Falzarano and Ul Mulk 1994; Reed 2011). Ensuring an enhanced level of safety and operability in navigation needs an operative real-time support such as guidance to the master (Bačkalov et al. 2016; Liwång 2019). Therefore, to properly address the actual behaviour of naval vessels in a seaway requires a careful complementary combination of design performance prediction and operative measures to provide an efficient support to the onboard decision-making. This can be achieved providing measures and guidance to the master to safe handle a vessel in rough weather conditions whenever these cannot be avoided. In fact, due to their targets, naval vessels often cannot elude harsh weather condition when fulfilling their missions. The definition of naval vessels operational guidance and the interaction with the mission profile is a topic addresses by several studies where the guidance has been developed with reference to various criteria not considering only the safety of navigation, e.g., environmental and economic aspects. In the work of Magoga (2020), the decision support framework to the master has been defined focusing on the structural fatigue by finite element method (FEM). The relationship between structural fatigue and operational profile is addressed through the spectral fatigue analysis by Ćorak et al. (2015) as well as Thompson (2022). The risk of the capsizing event in harsh conditions has been specifically considered in the research of Peters (2009). As noted above, aspects other than ship safety have been considered in the definition of measures for naval vessels, e.g. Colwell (2002) tackled the scenario of helicopter landing on board in hostile conditions. Reduction of fuel consumption and pollutant emissions has been a subject of interest of several studies as well (van Straten and de Boer 2012). The above-mentioned literature review points out a strong effort in the development of guidance for decision-making, based on diverse criteria and relying on ship dynamic knowledge. However, it seems that a further effort in discussing about appropriate criteria in terms of ship stability in waves can improve the decision-making on board. It appears that OG relying on stability in waves criterion is lacking. To address this gap is one of the main goals of this work, proposing a methodology taking into account the behavior of vessels in terms of stability in a seaway. Moreover, ship stability in waves-related phenomena are recognized to be not solved and they requires further investigations, as clearly stated in the Intact Stability code (ISc; IMO 2008).
In terms of acceptability criteria, ship stability is one of the most important topics that well fit into the Goal Based Standards (GBS), developed at the International Maritime Organization (Hoppe 2005), but also adopted in the Naval Ship Code (NSC). GBS is a powerful tool able to establish a framework for integrating ship stability into a risk-based design process (Alman 2019). The NSC identifies performance requirements in relation to the operational profile which can be verified by appropriate performance-based criteria to reach a sufficient level of safety. This means that criteria other than the prescriptive standards of traditional Navy codes (MoD 1999, 1980; NAVSEA 2002; MoD 2000) can be considered in the assessment of naval vessel safety features. In this perspective, the Second Generation Intact Stability criteria (SGISc) issued by IMO (2020) have been considered in this paper as an applicable tool, due to its performance-oriented structure as highlighted by Belenky et al. (2008). In the following paragraph a brief introduction to the SGISc is given, focusing on their operational aspects. Finally, an application of operational guidance to a set of naval vessels is carried out and relevant considerations are reported in the concluding paragraph.
2 SGISc as stability criteria of naval vessels
The SGISc are the latest improvements issued by the International Maritime Organization (IMO) in the field of ship intact stability assessment since the finalization of the ISc (IMO 2008). It is expected that they will positively affect the design process of ships in the next years. Nevertheless, the criteria are not yet mandatory, but IMO endorses their extensive application among the shipping community to gather as much feedback as possible. The effect of waves on the intact stability can be considered as a further step compared to the first-generation criteria (i.e., the ISc). During their development, five stability failure modes have been identified: dead ship condition (DS), excessive acceleration (EA), parametric rolling (PR), pure loss of stability (PL) and surf-riding (SR). These phenomena have been thoroughly analysed and relevant detailed studies can be found in literature in the latest years (Belenky et al. 2011; Bulian and Francescutto 2011; Francescutto 2016; Coast Guard US 2019) as well as several application cases (e.g., Tompuri et al. 2014; Grinnaert et al. 2016; Petacco et al. 2021, 2021). SGISc have been originally developed by IMO for the merchant ship fleet; however since they have been formulated according to a physical-based approach, they can be applied in principle to every ship typology, naval vessels as well. In this perspective, attention is to be paid to some specific points such as: the standard thresholds are based on sample of commercial vessels that are characterized by a different operational profile in reference to naval vessels; in addition, some empirical formulations tailored for commercial vessels are applied, such as Ikeda’s method for roll damping estimation. Nevertheless, the modular structure of SGISc allows for alternative formulations to be introduced on a case-by-case basis. This feature represents a powerful characteristic that allow to extend the application of SGISc beyond the typical ships subject of IMO regulations, for example to naval vessels, as already evident in literature (Bassler 2008; Boccadamo and Rosano 2019; Rinauro et al. 2020). Another innovation introduced by SGISc is the definition of operational measures, i.e., indications to the master to handle the ship in selected weather conditions to keep a sufficient level of safety. Operational Limitations (OL) and the Operational Guidance (OG) have been defined within the framework of operational measures: OL set restrictions to the vessel operability acting on the geographical area and/or environmental conditions to avoid a stability failure; OG can be described as a handbook reporting information and recommendations about ship handling in particular sailing conditions (i.e., the combination of heading and ship speed). The OG are meant to be applied to all stability failure modes but the DS, since this one assumes the ship is not able to manoeuvre and steer due to loss of power. A detailed description of the OG structure is given in the next paragraph.
2.1 Operational guidance in the SGISc framework
The OG identifies a set of assumed situations that should be avoided or that are deemed dangerous for each sea state during the navigation. An assumed situation represents the combination of the environmental parameters (i.e., significant wave height, zero-crossing wave period, wind and gust characteristics) and the ship sailing condition. The operative information supporting the master in the ship navigation is reported in the OG handbook. Adopting the suggestions of OG, the risk rate is reduced to an acceptable level. Since the OG is drawn up in the design phase, care should be paid to address all possible sea states the ship might face during her life. Therefore, OG can be fully exploited if detailed weather forecasts are provided to allow the master the safest routing in relation to the actual loading condition. In the framework of SGISc, three different types of OG have been defined: probabilistic, deterministic and simplified. The simplified approach relies on the same numerical methodology characterizing vulnerability criteria of SGISc (IMO 2020). An extensive presentation and interesting discussion about the SGISc vulnerability levels has been given by Schrøter et al. (2017); Kyle et al. (2021); Petacco et al. (2022). The other two approaches need instead a more complex numerical tool. They require non-linear simulation in the time-domain having at least 4 degrees of freedom modeled and considering motions coupling. The development of such a comprehensive numerical tool is a challenge among researchers but great achievements have been reached in the latest year (Gualeni et al. 2020; Kuroda et al. 2019; Yasukawa et al. 2021). The probabilistic OG is based on probabilistic criteria, such as the expected failure rate or the probability of stability failure over a specific time period. A sailing condition is deemed safe when the criterion does not exceed the standard threshold as reported in (1).
where r is the upper boundary of 95% confidence interval of the stability failure rate. The criteria r is evaluated by means of numerical simulations lasting until a failure is detected, i.e., the exceedance of lateral acceleration or roll angle thresholds. This implies time-consuming simulations especially when a rare event is sought, such as those considered in the SGISc. The deterministic OG relies on the same numerical tool as the previous one, although a deterministic criterion is evaluated in the post-processing phase. The simplification leads to a lower level of accuracy, thus a corrective factor \(\alpha \) has been introduced to ensure an equivalent level of safety, as shown in (2).

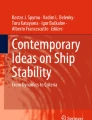
Generic representation by polar diagram of the suggested simplified OG in the MSC.1/Circ.1627. a Pure loss of stability failure mode, b Parametric rolling failure mode, c Excessive acceleration failure mode, d Surf-riding failure mode
where \(X_{crt}\) is the selected deterministic criterion and \(X_{std}\) is the corresponding standard, i.e., the roll angle or lateral acceleration thresholds. The corrective factor \(\alpha \) has been tuned by the application on a sample of ships during the development of SGISc (IMO 2017). The overall duration of carried out simulations should be at least 15 h for each sailing condition, beside each simulation can be split into several parts not shorter than 3 h each. Detailed explanation about probabilistic and deterministic methodologies, as well as the required numerical tool can be found in IMO (2022). Finally, the simplified OG represents the fastest but also the less accurate methodology to drawn up guidance to the master. It consists of a simplified method requested to provide a level of safety not lower than the other OG typologies. In the guidelines of IMO (2020), for each stability failure mode, the following example procedures are suggested:
-
PL - Forward speed higher than \(0.752\sqrt{L}\) [m/sec] should be avoided from beam to following seas for those sea states entailing the ship not compliant with the short-term criteria of Level 2. L [m] is defined as the ship length according to ISc;
-
PR - Forward speed in those sea states entailing the ship not compliant with the short-term criterion of 2\(^{nd}\) check of Level 2 should be avoided for all wave directions;
-
EA - Sailing conditions assessed with Level 2 resulting in a short-term criterion \(C_{S} (\mu ,V_{S},H_{S},T_{Z} )>10^{-6}\) should be avoided. The original criterion is to be properly modified taking into account the heading and the speed;
-
SR - For this failure mode two OG are suggested by the rule; in this work the following has been adopted: forward speed higher than \(0.94\sqrt{L}\) [m/sec] should be avoided for quartering seas (i.e., \(\pm 45^{o}\)) in those sea states having \(\lambda \ge 0.8\cdot L\) and \(H_{S}\ge 0.04\cdot L\).
However, an alternative methodology for the simplified OG can be applied, e.g., as done by the author (Petacco 2022).
Regardless of the selected typology, OG should clearly show whether the sailing condition is acceptable or unacceptable for each relevant sea state. The most effective graphical representation is the polar diagram; nevertheless, other types of representation providing an equivalent level of information can be produced. A generic example of polar diagram representation for each stability failure mode is given in Fig. 1. The ship forward speed \(V_{S}\) is reported along the radius while the ship heading \(\mu \) is measured by the angular coordinate in degrees (\(\mu =0^{o}\) means following waves). Sailing conditions to be avoided are highlighted in red.
3 Application case
In this work, it has been decided to apply the simplified OG as a tool to evaluate a set of naval vessels having different dimensions and operational profile. As reported in 2.1, roll angles and lateral accelerations have been considered as leading criteria in this analysis. This investigation tries to complement the guidelines usually provided to the master to avoid vertical acceleration (Ferreiro et al. 1994). A selection of environmental conditions is investigated in terms of ship stability in a seaway. Outcomes have been presented by polar diagram for each stability failure and assumed situation (i.e., sea state, ship speed and heading.). A comprehensive polar diagram has been obtained by the superposition of results of all stability failures for each assumed situation. Areas representing the sailing conditions to be avoided have been highlighted in red. Moreover, a quantitative index has been introduced to compare the amount of sailing conditions to be avoided among the investigated naval vessels.
3.1 The investigated vessels
Three typologies of naval vessels have been investigated: a Landing Platform Dock (LPD), an Offshore Patrol Vessel (OPV) and a Destroyer unit. The selected unit largely cover a wide range of a typical naval fleet in terms of dimensions and operational profile. The main particulars are reported in Table 1.
3.2 Consideration on the excessive acceleration failure mode
The assessment of the EA failure mode requires the identification of the highest location where crew members may be present. However, lateral accelerations are also related to the considered longitudinal position due to the coupling with motions other than roll, e.g., yaw and pitch. Therefore, it may happen that locations at the far ends of the vessel are subject to accelerations larger than the highest point in the midship area. It has been decided to undertake a qualitative analysis of this phenomenon by the EA second vulnerability level as a function of the longitudinal position along the hull. The second vulnerability level evaluates the standard deviation of the lateral acceleration obtained from the spectrum of roll motion due to the action of waves. In the analysis, it is assumed a beam waves direction and a zero-speed condition. The lateral acceleration computed by the criterion embeds a corrective factor \(k_L\) to consider coupling with yaw and pitch motions (3).
where \(a_{y}\) is the response amplitude operator of the lateral acceleration per unit wave amplitude [(\(\hbox {m/s}^{2}\))/m]; g is the gravity acceleration [\(\hbox {m/s}^{2}\)] ; \(h_{r}\) is the vertical distance between the investigated point and the roll axis [m], the roll axis has been considered located at the midpoint between the vertical center of gravity and the waterline; \(\omega \) is the wave frequency [rad/s] and \(\varphi \) is the roll amplitude in regular beam waves of unit amplitude [rad/m]. The corrective factor \(k_{L}\) is defined in (4).
In this investigation, the EA Level 2 criterion has been evaluated for each longitudinal coordinate considering the highest position where crew may be present. Funnel and mast locations have not been considered in this analysis. In Fig. 2, the outcomes of the qualitative analysis are reported for each investigated vessel. On the horizontal axis is reported the non-dimensional longitudinal position. On the left vertical axis, the values of \(k_{L}\) are reported as reference line. On the right vertical axis, the EA criterion values for each longitudinal position are shown in logarithmic scale.

Outcomes of the qualitative analysis on the corrective factor \(k_{L}\) in the EA second vulnerability level as a function of the longitudinal position on board. The vertical dimension of the ship longitudinal profiles is not represented in scale
Outcomes point out that the largest values of the EA criterion are associated with the highest position taken into account, except for the LPD unit. Besides, in the locations close to the bow, it appears that EA criterion has comparable values to the largest one, even if the height is significantly lower. It should be noted that the formulation does not take into account the transverse coordinate of the considered location.
As a result of the above analysis, it has been possible to identify the worst location to be investigated in terms of lateral acceleration, e.g., the location having the largest EA criterion value. In Table 2, the largest EA criterion and the respective coordinate are shown for each vessel. These locations have been considered in the evaluation of the simplified OG in the following sections.
3.3 Selected environmental conditions
The simplified OG has been evaluated for a selection of sea states taken from the North Atlantic Ocean wave scatter table compiled by IACS (2001). The scatter table gathers the sea state (i.e., combination of wave height and wave period) occurrences over a year of observations. For the considered scatter table, 17 significant wave heights \(H_{S}\) from 0.5 m to 16.5 m (with a step of 0.5 m) and 16 zero-crossing wave periods \(T_{Z}\) from 3.5 s to 18.5 s (with a step of 0.5 s) have been reported for the North Atlantic Ocean. This table allows us to identify the most likelihood combination of wave period and height for a specific geographical area. Since naval vessels are the domain of this investigation, the sea state code defined by NATO (2000) has been deemed appropriate to identify the significant wave height to be assessed. The sea state code classifies a set of 10 ranges of wave height, identified by a code from 0 to 9. In this study, a representative \(H_{S}\) for every Sea State code has been selected rounding the average of the range extremes with a step of 0.5 m. This choice is meant to better align with the cases observed in the North Atlantic Ocean scatter table. In Table 3, the Sea State code and the associated representative \(H_{S}\) are reported. Sea State code from 0 to 2 have not been considered in this study, since they are characterized by a very limited wave height (i.e., lower than 0.5 m). Sea State code 9 has no wave height upper limit, thus in this investigation the boundaries has been fixed equal to the maximum significant wave height observed in the North Atlantic Ocean scatter table, i.e., \(H_{S} = 16.5\) m.
Once a set of representatives \(H_{S}\) has been identified, the association to a corresponding zero-crossing wave period is necessary to continue the analysis. It has been decided to select the three most likely wave period \(T_{Z}\) observed in the North Atlantic Ocean for each representative \(H_{S}\). The final environmental condition setup adopted in the investigation is reported in Table 4. It is worth mentioning that Sea State 8 to 9 together have occurrences lower than 0.1% of total observations, while Sea State 4 and 5 are the most likely.
4 Outcomes of the analysis
Results of the investigation have been represented in the form of polar diagram, measuring the ship forward speed on the radial coordinate and the heading on the angular coordinate. Heading from \(0^{\circ }\) (following wave) to \(180^{\circ }\) (heading wave) have been considered with a step of \(30^{\circ }\). Investigated ship forward speeds range from 0 kn to the maximum ship speed \(V_{Max}\) with a step of 2 kn. A sector of \(\pm 1\) kn and ± \(15^{\circ }\) has been identified for each sailing conditions. Sectors to be avoided according to simplified OG are highlighted in red. A comprehensive analysis has been carried out by the superposition of outcomes of all stability failures. The maximum ship speed (dash-dot circle) and the service ship speed (dashed circle) have been underlined in the diagrams. Due to their structure, simplified OG for PR, PL and SR (if applicable) are represented by a fixed scheme that can be repeated regardless the vessel and the sea state (Fig. 1). Simplified OG for EA failure mode is to be directly evaluated case by case. Table 5 summarizes the assumed situations where simplified OG suggests caution for each stability failure mode and Sea State code. According to the results, comprehensive polar diagrams for each assumed situation have been shown from Figs. 3, 4, 5, 6 and 7.

Polar diagram of the comprehensive OG of the LPD unit evaluated for a set of zero-crossing period (from left to right) and Sea State code 5 to 7 (from top to bottom). Sailing conditions deemed dangerous are highlighted in red. Dash–dot and dashed semi-circles represent, respectively, the service and the maximum ship speeds

Polar diagram of the comprehensive OG of the LPD unit evaluated for a set of zero-crossing period (from left to right) and Sea State code 8 to 9 (from top to bottom). Sailing conditions deemed dangerous are highlighted in red. Dash-dot and dashed semi-circles represent, respectively, the service and the maximum ship speeds

Polar diagram of the comprehensive OG of the OPV unit evaluated for a set of zero-crossing period (from left to right) and Sea State code 5 to 7 (from top to bottom). Sailing conditions deemed dangerous are highlighted in red. Dash-dot and dashed semi-circles represent, respectively, the service and the maximum ship speeds

Polar diagram of the comprehensive OG of the OPV unit evaluated for a set of zero-crossing period (from left to right) and Sea State code 8 to 9 (from top to bottom). Sailing conditions deemed dangerous are highlighted in red. Dash-dot and dashed semi-circles represent, respectively, the service and the maximum ship speeds

Polar diagram of the comprehensive OG of the Destroyer unit evaluated for a set of zero-crossing period (from left to right) and Sea State code 7 to 9 (from top to bottom). Sailing conditions deemed dangerous are highlighted in red. Dash-dot and dashed semi-circles represent, respectively, the service and the maximum ship speeds
4.1 Operational index - K
In order to cross-compare the outcomes of each investigated unit, it has been decided to introduce a quantitative index evaluating the likelihood of not acceptable sailing condition over the total operative condition. The likelihood of each assumed situation is obtained taking into account the encounter probability of the Sea State code and the probability of each heading and ship speed. The encounter probability of each sea state has been evaluated considering only the set of investigated cases. The statistical weight associated with a sea state has been calculated as the ratio between its number of observations and the total amount of observations related only to the investigated cases. The analysis is focused on the stability behavior of a ship in rough weather and therefore sea state conditions are considered up to a very severe level. In this perspective, it is worth recalling that in rough seas ships are usually characterized by a lower speed with reference to the design speed, either for involuntary or voluntary effects. Several studies are available about involuntary and voluntary speed reduction due to waves and their specific features (Taskar et al. 2016; Sasa et al. 2021). At the same time, in an even more general discussion, studies of NAVSEA (2002) show that a modern destroyer operates about 2% of time at the maximum speed and this could be a very interesting source of discussion when deciding about energy systems design onboard naval vessels. Taking the above-mentioned studies about sea state and ship speed interaction into account, it has been decided to introduce an additional parameter able to describe the speed reduction for safety reasons. The proposed parameter \(f_{V}\) represents the ship speed probability distribution from 0 kn to the maximum service speed; its formulation is presented in (5) and (6). Different values of \(f_{V}\) have been proposed representing the voluntary speed reduction in waves to avoid undesirable phenomena related to the sea state condition, e.g., slamming or green water effect.
Besides, the probability distribution of ship headings has been kept uniformly distributed from \(0^{\circ }\) to \(180^{\circ }\) up to Sea State 5. On the contrary, in Sea State 6 or above, the distribution reported in (7) has been assumed.
The likelihood of an acceptable sailing condition is reported in (8). The overall likelihood of total operative conditions is defined in (9). Finally, the operational index K is reported in (10).
Where \(f_{S}\), \(f_{\mu }\) and \(f_{V}\) are the probability density functions related to the sea state code, the heading and the ship speed, respectively; ss is a short notation meaning the considered sea state (i.e., pair of \(H_{S}\) and \(T_{Z}\)) and C is a binary coefficient equal to 1 whether the considered sailing condition is deemed safe, otherwise \(C=0\). Besides, the K-index has been evaluated considering two simpler parameters distribution typologies: on one hand a uniform distribution of speed and heading is used (type B), on the other hand, all parameters of the assumed situation are considered uniformly distributed (type C). It is expected that results of this typologies are more severe than the distribution described above (type A).
Results of K-indexes obtained in this investigation are reported in Table 6. A vessel with a large index means that several situations are to be avoided to keep a sufficient level of safety, hence, the operational profile is negatively affected. According to MSC.1/Circular 1627, it is requested that K-index is not higher than 20%. It should be noted that this threshold has been tuned for commercial ships. Outcomes show that all vessels have a K-index safely lower than the thresholds set in the MSC.1/Circular 1627 when considering distribution A, even though LPD unit is not far from vulnerability. As expected, the comparison of different distributions A, B, C points out that the more the parameters are uniformly distributed, the more the index increases toward vulnerability. Neglecting the actual distribution of sea states produces a significant increment in the K-index, making the assessment more and more conservative. This is due to the negative impacts of heavy sea states, which are usually associated with a relatively low occurrence.
5 Comments and conclusions
An overview on how safety aspects during the navigation of naval vessel may be affected by the operational profile is given. In particular, safety in terms of stability has been considered. The operational guidance of the SGISc framework have been described and analysed. Although the SGISc are not meant for naval vessels, the simplified guidance has been considered applicable to evaluate how safety aspects may affect the vessel operability. In particular, all stability failure modes have been investigated, except for the dead ship condition, and results have been presented in terms of polar diagram. The analysis considers a selection of sea states, in accordance with the nomenclature adopted by the navies. Outcomes point out that all vessels do not need any operational guidance for the PR and PL stability failure mode, regardless of the considered sea state. As concern the EA and SR phenomena, warnings to the master are required when sailing from Sea State 5 to Sea State 9. As expected, the EA guidance affects mainly the beam encounter angles, suggesting to completely avoid beam waves regardless of ship speed when required. In wave heading near the bow (\(120^{\circ }\) and \(150^{\circ }\)), the guidance set an upper limit to the ship speed, while in quartering waves minimum sailing speed is set. It seems reasonable that this behaviour is to be associated with the encounter frequency as a function of the heading and speed. In addition, a further investigation dealing with the EA stability failure mode has been undertaken considering the influence of the longitudinal position on the EA Level 2 criterion has been considered. The analysis points out that in one case the largest acceleration is not evaluated for the highest position. Moreover, criteria evaluated for the locations close to the bow are comparable to the highest values, even though their height is significantly lower. Regarding the SR phenomenon, the guidance set a maximum limiting speed that in any case is always higher than the considered service speed. The assessment shows that cautions is to be paid for Sea State code 5 and over in following seas (i.e., \(\pm 45^{o}\)). It is worth noting that the guidance for SR has a very simplified structure; therefore, a more accurate tool is preferable, especially for the largest vessels. From the comprehensive overview of the OG, the outcomes point out the need of restrictive actions to the routing operations related to a specific mission. Guidance shown in the polar diagram highlight the highest level of risk related to the considered sailing condition.
To better compare the outcomes of comprehensive OG, a quantitative index has been defined taking into account the amount of assumed situations deemed not safe. Evaluation of the quantitative index points out that all vessels have a respectable behavior in terms of stability in waves: in fact less than 20% of the assumed situations (in terms of speed, heading and sea state) implies critical ship performance. Actually, LPD unit is very close to the threshold of 20%, while other vessels are far below. In addition, a comparison among different distributions of the parameters, relevant to a change in speed or heading in waves and characterizing a sailing condition, has been carried out. It allows evidence of the huge impact of a proper navigation attitude in relation with the sea state conditions. For sake of completeness, it is highlighted that some relevant aspects in heavy seaway conditions have not been considered. Moreover, it is worth mentioning that some sailing conditions may be considered safe by OG, but they may be unattainable because of limits in the propulsion and steering system or other undesirable problems, such as slamming or excessive vertical motion. However, the adoption of this kind of guidance can create a crew awareness on ship behaviour in heavy weather condition.
In future works, the added resistance as a further effect of waves and ship motions can be addressed and an estimation of the actual speed loss and pollutant emissions taken into consideration consistently. The implementation of added resistance effects in the development of OG will represent a contact point among operative profile, safety and eco-friendly aspects in the assessment of ship performance in waves. Coupling effects of motions other than roll need to be further investigated, as well.
Data Availability
Not applicable.
References
Alman PR (2019) Contemporary ideas on ship stability. In: (PP. 927–944). Springer, Cham. https://doi.org/10.1007/978-3-030-00516-0_55
Bačkalov I, Bulian G, Rosén A, Shigunov V, Themelis N (2016) Improvement of ship stability and safety in intact condition through operational measures: challenges and opportunities. Ocean Engineering 120:353–361. https://doi.org/10.1016/j.oceaneng.2016.02.011www.sciencedirect.com/science/article/pii/S0029801816000664
Bassler C (2008) Application of parametric roll criteria to naval vessels. In: Proceedings of the 10th international ship stability workshop (PP. 57–70). Daejeon, South Korea
Belenky V, de Kat J, Umeda N (2008) Toward performance-based criteria for intact stability. Mar Technol 45(2):101–120
Belenky V, Bassler C, Spyrou K (2011) Development of second generation intact stability criteria (Hydromechanics Department Report No. NSWCCD-50-TR-2011/065). Naval Warfare Center Carderock Division, Carderock, USA
Boccadamo G, Rosano G (2019) Excessive acceleration criterion: Application to naval ships. Journal of Marine Science and Engineering7(12). https://doi.org/10.3390/jmse7120431https://www.mdpi.com/2077-1312/7/12/431
Bulian G, Francescutto A (2011) Considerations on parametric roll and dead ship conditions for the development of second generation intact stability criteria. In: Proceeding of the 12th International Ship Stability Workshop (ISSW). Washington DC, USA
Coast Guard US (2019) Continued development of Second Generation Intact Stability criteria (Naval Architecture Division Report No. NSWCCD-80-TR-2029). U.S. Coast Guard Office of Design and Engineering Standards, USA
Colwell JL (2002) Maritime helicopter ship motion criteria - challenges for operational guidance. In: NATO RTO SCI symposium proceedings “Challenges in Dynamics, System Identification, Control and Handling Qualities for Land, Air, Sea and Space Vehicles” (SCI-120). DRDC Atlantic SL 2002-076, Berlin, Germany
Ćorak M, Parunov J, Guedes Soares G (2015) Probabilistic combination factors of wave and whipping bending moments. J Ship Res 59(1):11–30. https://doi.org/10.5957/jsr.2015.59.1.11
Falzarano J, Ul Mulk MT (1994) Large amplitude rolling motion of an ocean survey vessels. Marine Technology and SNAME News 31(4):278–285. https://doi.org/10.5957/mt1.1994.31.4.278
Ferreiro LD, Smith TC, Thomas WL, Macedo R (1994) Pitch stabilization for surface combatants. Nav Eng J 106(4):174–191. https://doi.org/10.1111/j.1559-3584.1994.tb03017.x
Francescutto A (2016) Intact stability criteria of ships - Past, present and future. Ocean Eng 120:312–317
Grinnaert F, Billard JY, Laurens JM (2016) KG\(_{{\rm max}}\) curves associated with second generation intact stability criteria for different types of ships. J Mar Sci Appl 15(3):223–235. https://doi.org/10.1007/s11804-016-1369-3
Gualeni P, Paolobello D, Petacco N, Lena C (2020) Seakeeping time domain simulations for surf-riding/broaching: investigations toward a direct stability assessment. J Mar Sci Technol 25(4):1120–1128. https://doi.org/10.1007/s00773-020-00704-x
Hoppe H (2005) Goal-based standards. J Marit Aff 4(2):169–180. https://doi.org/10.1007/BF03195072
IACS (2001 November) Standard Wave Data (Recommendation n.34 - Rev.1 No 34). International Association of Classification Society
IMO (2008) Adoption of the international code on Intact Stability (Resolution No MSC.267(85)). International Maritime Organization, London, UK
IMO (2017) SDC 5/6/9 - Finalization of the draft guidelines for the specification of direct stability assessment, and for the preparation and approval of operational limitations and operational guidance (Report). International Maritime Organization, London, UK
IMO (2020 December) Interim Guidelines on the Second Generation Intact Stability Criteria (Circular No MSC.1/1627). London, UK:International Maritime Organization
IMO (2022 January) SDC 8/WP. 4 - Development of Explanatory Notes to the Interim Guidelines on Second Generation Intact Stability criteria (Report of the Drafting Group on Intact Stability). London, UK: International Maritime Organization
Kuroda T, Hara S, Houtani H, Ota D (2019) Direct stability assessment for excessive acceleration failure mode and validation by model test. Ocean Eng 187:106137. https://doi.org/10.1016/j.oceaneng.2019.106137. http://www.sciencedirect.com/science/article/pii/S0029801819303257
Kyle E, Kim S, Hurt L (2021) Implementation of the imo second generation intact stability guidelines. J Mar Sci Eng 10(1):41. https://doi.org/10.3390/jmse10010041
Liwång H (2019) Exposure, vulnerability and recoverability in relation to a ship’s intact stability. Ocean Eng 187:106218. https://doi.org/10.1016/j.oceaneng.2019.106218
Magoga T (2020) Fatigue damage sensitivity analysis of a naval high speed light craft via spectral fatigue analysis. Ships Offshore Struct 15(3):236–248. https://doi.org/10.1080/17445302.2019.1612543
MoD I (1980) NAV-04-A013 - Norme per la stabilità e la riserva di galleggiabilità delle navi di superficie (Italian navy rules). Ministry of Defense, Italy
MoD F (1999) \(\text{ N }\,^{\circ }\) 6018 A - Stabilite des Batiments de Surface de La Marine Nationale (French navy rules). Ministry of Defense, France
NATO (2000 December) Common procedures for seakeeping in the ship design process (Standardization Agreement (STANAG) No 4154 - Edition 3). Military Agency for Standardization (MAS), Bussels, Belgium
NATO (2014) Standard Anep-77 – Naval Ship code (Edition E No ver. 1). NATO Standardization Agency (NSA), Bristol, UK
NAVSEA (2002) Speed-time profile guide for surface ships (Opera-tional Guidance). U.S. Department of Defense, Report No. 05Z1.2003, Washington D.C., USA
Petacco N, Pitardi D, Podenzana Bonvino C, Gualeni P (2021) Application of the IMO second generation intact stability criteria to a ballast free containership. J Mar Sci Eng 9(12):17. https://doi.org/10.3390/jmse9121416
Petacco N, Ruggiero V, Gualeni P (2022 June) Intact stability assessment of ro-ro pax vessel in the framework of second generation intact stability criteria with a specific focus on the operational profile. Progress in Marine Science and Technology(6, pp. 52-59). La Spezia, Italy. https://doi.org/10.3233/PMST220008
Petacco N, Vernengo G, Villa D, Coppedé A Gualeni P (2021) Influence of systematic hull shape variations on ship stability performances in waves. J Ship Res 65(03):243–256. https://doi.org/10.5957/JOSR.12190076
Peters AJ (2009) Contemporary ideas on ship stability. In: (PP. 907–925). Springer. https://doi.org/10.1007/978-3-030-00516-0_54
Reed AM (2011) Contemporary ideas on ship stability and capsizing in waves. In: (PP. 793–823). Springer, Cham. https://doi.org/10.1007/978-94-007-1482-3_45
Rinauro B, Begovic E, Gatin I, Jasak H (2020) Surf-riding operational measures for fast semidisplacement naval hull form. Proceedings of the 12\(^{th}\) Symposium on High-Speed Marine Vehicles (HSV) (5, pp.219). Naples, Italy
Sasa K, Chen C, Fujimatsu T, Shoji R (2021) Maki A (2021) Speed loss analysis and rough wave avoidance algorithms for optimal ship routing simulation of 28,000-dwt bulk carrier. Ocean Eng 228:108800. https://doi.org/10.1016/j.oceaneng.2021.108800
Schrøter C, Lützen M, Erichsen H, Jensen JJ, Kristensen HO, Hagelskjær Lauridsen P, Baltsersen JP (2017 5–7 June) Sample applications of the second generation intact stability criteria – robustness and consistency analysis. Proceeding of the 16th international ship stability workshop (pp. 9-13). Belgrade, Serbia
Taskar B, Yum KK, Steen S, Pedersen E (2016) The effect of waves on engine-propeller dynamics and propulsion performance of ships. Ocean Eng 122(2016):262–277. https://doi.org/10.1016/j.oceaneng.2016.06.034
Thompson I (2022) Tactical operator guidance to mitigate naval vessel structural fatigue damage. Appl Ocean Res 119:103005. https://doi.org/10.1016/j.apor.2021.103005
Tompuri M, Ruponen P, Forss M, Lindroth D (2014) Application of the second generation intact stability criteria in initial ship design. Huston, Texas, USA, SNAME maritime convention. https://doi.org/10.5957/SMC-2014-T05
U.K. MoD (2000) Defence Standard 02-109 - Stability Standards for Surface Ships. U.K. MoD, London
van Straten OFA, de Boer MJ (2012) Optimum propulsion engine configuration from fuel economic point of view. Proceedings of the 11\(^{th}\) International Naval Engineering Conference and Exhibition (INEC). Edinburgh, UK
Vasilikis NI, Geertsma RD, Visser K (2022) Operational data-driven energy performance assessment of ships: the case study of a naval vessel with hybrid propulsion. J Mar Sci Technol 22(2):84–100. https://doi.org/10.1080/20464177.2022.2058690
Yasukawa H, Hirata N, Nakayama Y, Matsuda A (2021) Drifting of a dead ship in wind. Ship Technol Res 70(1):26–45. https://doi.org/10.1080/09377255.2021.1954835
Funding
Open access funding provided by Universitá degli Studi di Genova within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the conceptualization of this work. N.P wrote the main manuscript and prepared all figures. All authors reviewed the final version of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
Not applicable. The authors declare no competing interests.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Petacco, N., Gualeni, P. The influence of ship stability in waves on naval vessel operational profiles. J. Ocean Eng. Mar. Energy 9, 681–695 (2023). https://doi.org/10.1007/s40722-023-00291-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40722-023-00291-0