
Abstract
In this paper, an enriched reproducing kernel particle method combined with stabilized conforming nodal integration (SCNI) is proposed to tackle material interface problems. Regarding the domain integration, the use of SCNI offers an effective NI technique and eliminates the zero-energy modes which occurs to direct NI. To model material interfaces, the method enriches the approximation by adding special functions constructed based on the level set function to represent weak discontinuities. Numerical examples with simple and complicated geometries of interface problems in two-dimensional linear elasticity are presented to test the performance of the proposed method, and results show that it considerably reduces strain oscillations and yields optimal convergence rates.












































Similar content being viewed by others

References
Belytschko T, Lu YY, Gu L (1994) Element-free Galerkin methods. Int J Numer Methods Eng 37:229–256
Liu WK, Jun S, Zhang YF (1995) Reproducing kernel particle methods. Int J Numer Methods Fluids 20:1081–1106
Duarte CA, Oden JT (1996) H-p clouds-an h-p meshless method. Numer Methods Partial Differ Equ 12:673–705
Atluri SN, Zhu T (1998) A new Meshless Local Petrov–Galerkin (MLPG) approach in computational mechanics. Comput Mech 22:117–127
De S, Bathe KJ (2000) The method of finite spheres. Comput Mech 25:329–345
Arroyo M, Ortiz M (2006) Local maximum-entropy approximation schemes: a seamless bridge between finite elements and meshfree methods. Int J Numer Methods Eng 65:2167–2202
Chen J-S, Pan C, Wu C-T (1997) Large deformation analysis of rubber based on a reproducing kernel particle method. Comput Mech 19:211–227
Rabczuk T, Belytschko T (2007) A three-dimensional large deformation meshfree method for arbitrary evolving cracks. Comput Methods Appl Mech Eng 196:2777–2799
Belytschko T, Lu YY, Gu L (1995) Crack propagation by element-free Galerkin methods. Eng Fract Mech 51:295–315
Belytschko T, Tabbara M (1996) Dynamic fracture using element-free Galerkin methods. Int J Numer Methods Eng 39:923–938
Rabczuk T, Bordas S, Zi G (2007) A three-dimensional meshfree method for continuous multiple-crack initiation, propagation and junction in statics and dynamics. Comput Mech 40:473–495
Tanaka S, Suzuki H, Sadamoto S, Sannomaru S, Yu T, Bui TQ (2016) J-integral evaluation for 2D mixed-mode crack problems employing a meshfree stabilized conforming nodal integration method. Comput Mech 58:185–198
Sadamoto S, Ozdemir M, Tanaka S, Taniguchi K, Yu TT, Bui TQ (2017) An effective meshfree reproducing kernel method for buckling analysis of cylindrical shells with and without cutouts. Comput Mech 59:919–932
Wang D, Chen J-S (2008) A Hermite reproducing kernel approximation for thin-plate analysis with sub-domain stabilized conforming integration. Int J Numer Methods Eng 74:368–390
Wang D, Lin Z (2011) Dispersion and transient analyses of Hermite reproducing kernel Galerkin meshfree method with sub-domain stabilized conforming integration for thin beam and plate structures. Comput Mech 48:47–63
Dolbow J, Belytschko T (1999) Numerical integration of the Galerkin weak form in meshfree methods. Comput Mech 23:219–230
Beissel S, Belytschko T (1996) Nodal integration of the element-free Galerkin method. Comput Methods Appl Mech Eng 139:49–74
Chen J-S, Wu C-T, Yoon S, You Y (2001) A stabilized conforming nodal integration for Galerkin mesh-free methods. Int J Numer Methods Eng 50:435–466
Chen J-S, Hillman M, Rüter M (2013) An arbitrary order variationally consistent integration for Galerkin meshfree methods. Int J Numer Methods Eng 95:387–418
Hillman M, Chen J-S (2016) An accelerated, convergent, and stable nodal integration in Galerkin meshfree methods for linear and nonlinear mechanics. Int J Numer Methods Eng 107:603–630
Huang T-H, Wei H, Chen J-S, Hillman M (2020) RKPM2D: an open-source implementation of nodally integrated reproducing kernel particle method for solving partial differential equations. Comp Part Mech 7:393–433
Dyka CT, Randles PW, Ingel RP (1997) Stress points for tension instability in SPH. Int J Numer Methods Eng 40:2325–2341
Bonet J, Kulasegaram S (2000) Correction and stabilization of smooth particle hydrodynamics methods with applications in metal forming simulations. Int J Numer Methods Eng 47:1189–1214
Puso MA, Chen JS, Zywicz E, Elmer W (2008) Meshfree and finite element nodal integration methods. Int J Numer Methods Eng 74:416–446
Wu CT, Koishi M, Hu W (2015) A displacement smoothing induced strain gradient stabilization for the meshfree Galerkin nodal integration method. Comput Mech 56:19–37
Wu CT, Wu Y, Lyu D, Pan X, Hu W (2020) The momentum-consistent smoothed particle Galerkin (MC-SPG) method for simulating the extreme thread forming in the flow drill screw-driving process. Comput Part Mech 7:177–191
Cordes LW, Moran B (1996) Treatment of material discontinuity in the Element-Free Galerkin method. Comput Methods Appl Mech Eng 139:75–89
Krongauz Y, Belytschko T (1998) EFG approximation with discontinuous derivatives. Int J Numer Methods Eng 41:1215–1233
Wang D, Chen J-S, Sun L (2003) Homogenization of magnetostrictive particle-filled elastomers using an interface-enriched reproducing kernel particle method. Finite Elem Anal Des 39:765–782
Liu CW, Taciroglu E (2006) Enriched reproducing kernel particle method for piezoelectric structures with arbitrary interfaces. Int J Numer Methods Eng 67:1565–1586
Joyot P, Trunzler J, Chinesta F (2005) Enriched reproducing kernel approximation: reproducing functions with discontinuous derivatives. Lect Notes Comput Sci Eng 43:93–107
Masuda S, Noguchi H (2006) Analysis of structure with material interface by meshfree method. Comput Model Eng Sci 11:131–144
Wu CT, Guo Y, Askari E (2013) Numerical modeling of composite solids using an immersed meshfree Galerkin method. Compos B Eng 45:1397–1413
Wang J, Zhou G, Hillman M, Madra A, Bazilevs Y, Du J, Su K (2021) Consistent immersed volumetric Nitsche methods for composite analysis. Comput Methods Appl Mech Eng 385:114042
Huang T-H, Chen J-S, Tupek MR, Beckwith FN, Koester JJ, Fang HE (2021) A variational multiscale immersed meshfree method for heterogeneous materials. Comput Mech 67:1059–1097
Koester JJ, Chen J-S (2019) Conforming window functions for meshfree methods. Comput Methods Appl Mech Eng 347:588–621
Sukumar N, Chopp DL, Moës N, Belytschko T (2001) Modeling holes and inclusions by level sets in the extended finite-element method. Comput Methods Appl Mech Eng 190:6183–6200
Osher S, Sethian JA (1988) Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton–Jacobi formulations. J Comput Phys 79:12–49
Simo JC, Hughes TJR (1986) On the variational foundations of assumed strain methods. J Appl Mech 53:51–54
Simo JC, Rifai MS (1990) A class of mixed assumed strain methods and the method of incompatible modes. Int J Numer Methods Eng 29:1595–1638
Fernández-Méndez S, Huerta A (2004) Imposing essential boundary conditions in mesh-free methods. Comput Methods Appl Mech Eng 193:1257–1275
Dunavant DA (1985) High degree efficient symmetrical Gaussian quadrature rules for the triangle. Int J Numer Methods Eng 21:1129–1148
Kachanov ML, Shafiro B, Tsukrov I (2013) Handbook of elasticity solutions. Springer, Berlin
Fries T-P, Belytschko T (2010) The extended/generalized finite element method: an overview of the method and its applications. Int J Numer Methods Eng 84:253–304
Guan PC, Chi SW, Chen JS, Slawson TR, Roth MJ (2011) Semi-Lagrangian reproducing kernel particle method for fragment-impact problems. Int J Impact Eng 38:1033–1047
Pasetto M, Baek J, Chen J-S, Wei H, Sherburn JA, Roth MJ (2021) A Lagrangian/semi-Lagrangian coupling approach for accelerated meshfree modelling of extreme deformation problems. Comput Methods Appl Mech Eng 381:113827
Zienkiewicz OC, Taylor RL, Zhu J (2013) The finite element method: its basis and fundamentals, 7th edn. Elsevier, Oxford
Acknowledgements
Huy Anh Nguyen is gratefully acknowledged the support of this work by Japanese Government (MEXT) scholarship for his Doctoral Program.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: Derivation of the weak form
Appendix A: Derivation of the weak form
The basis for the assumed strain method [39, 40] is specified by the Hu-Washizu variational principle, which incorporates all field equations from Eqs. (14) and (16)–(18) into the functional and fulfills them in the weak sense. The admissible function spaces for the displacement \(\varvec{u}\), stress \(\varvec{\sigma }\), assumed strain \(\tilde{\varvec{\varepsilon }}\) and Lagrange multiplier \(\varvec{\lambda }\) are defined as
respectively, and \(L^2\) is the space of square integrable functions. Note that the satisfaction of the essential BCs is not required for elements of \(\mathbb {V}\). Let \(\varPi _{HW}:\mathbb {V} \times \mathbb {S} \times \mathbb {E} \times \varLambda \rightarrow \mathbb {R}\) be the Hu-Washizu functional which is defined as follows,
By taking the first variation of the functional \(\varPi _{HW}\) in the standard manner, it yields
where \(\delta \varvec{u} \in \mathbb {V}\), \( \delta \varvec{\sigma } \in \mathbb {S}\), \( \delta \tilde{\varvec{\varepsilon }} \in \mathbb {E}\), and \( \delta \varvec{\lambda } \in \varLambda \) are the admissible variations of the displacement \(\varvec{u}\), stress \(\varvec{\sigma }\), assumed strain \(\tilde{\varvec{\varepsilon }}\) and Lagrange multiplier \(\varvec{\lambda }\), respectively, and \(\delta \varvec{\varepsilon } = (\nabla \delta \varvec{u} + \nabla \delta \varvec{u}^T) / 2\). Then, we pose the following variational problem: Find \((\varvec{u},\varvec{\sigma }, \tilde{\varvec{\varepsilon }}, \varvec{\lambda }) \in \mathbb {V} \times \mathbb {S} \times \mathbb {E} \times \varLambda \) such that,
for all \((\delta \varvec{u},\delta \varvec{\sigma }, \delta \tilde{\varvec{\varepsilon }}, \delta \varvec{\lambda }) \in \mathbb {V} \times \mathbb {S} \times \mathbb {E} \times \varLambda \). By the standard argument, it can be shown that Eqs. (52a)–(52d) are equivalent to Eqs. (14) and (16)–(18). Furthermore, carrying out integration by part on the first term of Eq. (52c) gives,
From Eq. (53), it illustrates that the physical significance of the Lagrangian term \(\varvec{\lambda }\) is the traction on the essential boundary \(\varGamma _u\). Hence, \(\varvec{\lambda }\) can be replaced by \(\varvec{\sigma } \cdot \varvec{n}\).
Let \(\mathbb {V}^h\), \(\mathbb {S}^h\), \(\mathbb {E}^h\), and \(\varLambda ^h\) be the finite-dimensional subspaces of \(\mathbb {V}\), \(\mathbb {S}\), \(\mathbb {E}\), and \(\varLambda \), respectively, i.e., \(\mathbb {V}^h \subseteq \mathbb {V}\), \(\mathbb {S}^h \subseteq \mathbb {S}\), \(\mathbb {E}^h \subseteq \mathbb {E}\), and \(\varLambda ^h \subseteq \varLambda \). Additionally, let \(\varvec{\varepsilon }^h :=\varvec{\varepsilon }(\varvec{u}^h)\). We have the discrete version of the foregoing variational problem: Find \((\varvec{u}^h,\varvec{\sigma }^h, \tilde{\varvec{\varepsilon }}^h, \varvec{\lambda }^h) \in \mathbb {V}^h \times \mathbb {S}^h \times \mathbb {E}^h \times \varLambda ^h\) such that,
for all \((\delta \varvec{u}^h,\delta \varvec{\sigma }^h, \delta \tilde{\varvec{\varepsilon }}^h, \delta \varvec{\lambda }^h) \in \mathbb {V}^h \times \mathbb {S}^h \times \mathbb {E}^h \times \varLambda ^h\).
The key step in deriving an assumed strain method is to construct an assumed strain field to satisfy the orthogonality condition [39, 40].
where \( \mathbb {E}^h_e = \{\varvec{\gamma } \in [L^2(\varOmega )]^{2\times 2}: \varvec{\gamma } = \varvec{\varepsilon }^h - \tilde{\varvec{\varepsilon }}^h\}\). The orthogonality condition states that the space of admissible stress field is orthogonal to the space of the enhanced strain field, i.e., the difference between the compatible strain field and the assumed strain field. Furthermore, the fulfillment of the orthogonality condition allows expressing Eq. (54c) in terms of the assumed strains only by observing that
and by (54a),
Now, we consider whether or not the variational problem Eq. (54) with the assumed strain given a priori in Eq. (13) is variationally consistent. Firstly, assume that the discrete stresses \(\varvec{\sigma }^h\) are computed by the relation
Consequently, Eq. (54a) is fulfilled exactly. Next, we need to verify the orthogonality condition Eq. (55) satisfied by the given assumed strain.
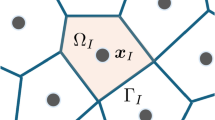
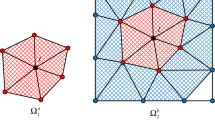
Recall that the problem domain \(\varOmega \) is decomposed into conforming and non-overlapping cells \(\{\varOmega _L\}^{NP}_{L=1}\), and each cell \(\varOmega _L\) is further subdivided into several conforming subcells \(\{\varOmega _{L}^K\}^{NSC}_{{K}=1}\) where NSC is the number of subcells contained in \(\varOmega _L\). The discrete counterpart of the assumed strain presented in Eq. (13) is given by
Remark:
-
If a cell \(\varOmega _L\) is not subdivided, the discrete form of Eq. (15) is used instead.
-
The assumed strain is defined to be constant over each subcell \(\varOmega _{L}^K\) or a cell \(\varOmega _L\) if it is not subdivided.
-
The assumed strains \(\tilde{\varvec{\varepsilon }}(\varvec{u}^h)\) only depend on the discrete displacement field \(\varvec{u}^h\).
Now, we prove that the orthogonality condition Eq. (55) is satisfied for the given assumed strain. By assuming the material properties are constant in \( \varOmega _{L}^K\) and using the fact that \(\tilde{\varvec{\varepsilon }}^h(\varvec{x}_{L}^{K})\) is constant in \( \varOmega _{L}^K\),
where Eq. (58) is used in the fifth equality.
Therefore, the orthogonality condition is achieved with the use of the given assumed strain. Finally, using the fact that \(\varvec{\lambda }^h = \varvec{\sigma }^h \varvec{n}\) on \(\varGamma _u\) and Eq. (56) allows rewriting Eq. (54) into a single equation
where \(\varvec{t}^h = \varvec{\sigma }^h \varvec{n} = (\mathbb {C}: \tilde{\varvec{\varepsilon }}^h) \cdot \varvec{n}\). To improve the coercivity of the variational formulation in Eq. (59), adding a penalty-like term to it yields [47]
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Nguyen, H.A., Tanaka, S. & Bui, T.Q. Material interface modeling by the enriched RKPM with stabilized nodal integration. Comp. Part. Mech. 10, 1733–1757 (2023). https://doi.org/10.1007/s40571-023-00585-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40571-023-00585-y