
Abstract
Low-frequency carbody swaying phenomenon often occurs to railway vehicles due to hunting instability, which seriously deteriorates the ride comfort of passengers. This paper investigates low-frequency carbody swaying through experimental analysis and numerical simulation. In the tests, the carbody acceleration, the wheel–rail profiles, and the dynamic characteristics of dampers were measured to understand the characteristics of the abnormal carbody vibration and to find out its primary contributor. Linear and nonlinear numerical simulations on the mechanism and optimization measures were carried out to solve this carbody swaying issue. The results showed that the carbody swaying is the manifest of carbody hunting instability. The low equivalent conicity and the decrease of dynamic damping of the yaw damper are probably the cause of this phenomenon. The optimization measures to increase the equivalent conicity and dynamic damping of the yaw damper were put forward and verified by on-track tests. The results of this study could enrich the knowledge of carbody hunting and provide a reference for solving abnormal carbody vibrations.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Self-excited oscillation in lateral and yaw directions is a common problem of railway vehicles in operation, which is characterized as hunting motion [1]. Hunting motion is caused by insufficient stability (also called instability), which usually occurs to a carbody or a bogie. Vehicle stability, which directly affects the operating safety or running quality of vehicles, is the most concerned performance in design, manufacturing and operation of railway vehicles [2, 3]. Abnormal hunting motion caused by insufficient stability has a significant influence on the vehicle dynamics performance, including the deterioration of ride comfort, physical damage to wheels or rails, and even derailment [4,5,6,7]. The coned wheel tread and the creep forces are supposed to be the direct causes of hunting motion [8]. Hunting motion can be divided into two categories according to vibration characteristics [9,10,11]. The one with lower frequency (usually within the range of 1–2 Hz) is characterized as carbody hunting, and the one with higher frequency (usually higher than 5 Hz) is characterized as bogie hunting.
Bogie hunting instability has attracted great attention since it can cause serious problems. Abnormal bogie hunting could cause severe wheel–rail interaction, which raises the probability of railway vehicle derailment [1, 2]. Therefore, bogie hunting stability determines the maximum safe speed of the vehicle operating. This speed is theoretically called the critical speed, which is the critical state between stability and instability. Much research has been devoted to bogie hunting stability. The bifurcation analysis is a common nonlinear method for bogie hunting stability analysis [12,13,14,15]. In [3, 16], the vibration acceleration at the end of the bogie above the axle box was collected to evaluate the bogie hunting stability of the vehicle. It was found that the abnormal wheel–rail contact relationship and the suspension elements failure between the main structures are the main contributors to the bogie hunting instability. Among the existing research, optimization of wheel–rail contact conditions and suspension parameters are the widely used measures to solve the bogie hunting issue [17,18,19].
The carbody hunting manifests as a large amplitude oscillation of carbody with low frequency, while the bogie hunting manifests as a large amplitude of oscillation of bogie with high frequency [20]. Carbody hunting with low frequency has a significant influence on ride comfort, and sometimes increases the risk of derailment under high vehicle speed especially when the carbody hunting is with large amplitude [2, 4, 6]. Aerodynamic loads on carbody could sometimes lead to low-frequency carbody hunting, and also have influences on characteristics of carbody hunting stability [21, 22]. The frequency range of carbody hunting motion is consistent with the frequency range to which the human body is sensitive. The international criteria for evaluating ride comfort, such as UIC513 and ISO2631, also give a large weight to this frequency range. Frequencies of carbody rigid-body modes are around 1 Hz, where resonance easily occurs and ride comfort deteriorates. Most researchers believe that carbody hunting is a modal resonance phenomenon between the bogie hunting mode and the carbody rigid-body mode [23, 24]. The hunting motion frequency increases with the increasing running speed of the train, while the frequencies of carbody rigid-body modes remain unchanged. The resonance phenomenon occurs when the hunting motion frequency is equal to or close to the frequency of carbody rigid-body modes, which causes the occurrence of carbody hunting instability. From the perspective of vibration energy, when the resonance energy is considerable and cannot be attenuated by the suspension system, the vibration energy of bogie movement is transferred to the carbody and the violent lateral motion of the carbody occurs.
Focusing on the carbody hunting issue, some researchers made a series of studies. Fujimoto and Miyamoto [25] carried out some specific tests and pointed out that the installation of dampers between adjacent carbody can alleviate this phenomenon to some extent. The optimization of the wheel–rail contact relationship by rail grinding and tread profile design had a positive effect on the improvement of carbody hunting stability [26,27,28]. Furthermore, the experimental and simulation results showed that the optimization of suspension parameters, especially the yaw damper parameters, was of great help in solving the carbody hunting problem [4, 29]. Considering the dynamic vibration absorption theory, Xia et al. [30] proposed a control method of carbody low-frequency swaying by using an active low-frequency inerter–spring–damper-type dynamic vibration damper.
The aforementioned studies on carbody hunting mainly believed that the wheel–rail relationship and suspension parameters are the leading causes of carbody hunting instability. However, only the optimization of suspension parameters was implemented and validated in the field test because the wheel–rail relationship is the most basic and vital vehicle parameter, and there are significant risks of using the new optimized wheel or rail profiles in the field test. Our research team has fully discussed with the vehicle operation department. Detailed analysis and demonstration has been made for the optimization, which made the optimization scheme could be verified by the field test. The research object of this paper is an intercity EMU (electric multiple unit) train that suffered from a carbody swaying issue.
The rest of this paper is organized as follows. In Sect. 2, we experimentally investigated the vibration characteristics, wheel profiles, and rail profiles. The dynamic characteristics of the dampers were tested on the test rig and analysed. In Sect. 3, influence of suspension parameters on the carbody hunting stability is discussed. Based on the analyses, the causes of carbody swaying are put forward together with optimization suggestions; then, the carbody swaying phenomenon is reproduced by an established simulation model. In Sect. 4, optimization is implemented and validated in the field test.
2 Experimental investigation
2.1 Vibration characteristics
A certain type of intercity EMU studied in this paper was frequently complained about by passengers about its poor ride comfort. The major symptom was that the vehicle swayed violently in the lateral direction in straight line areas, and passengers felt dizzy or even tended to vomit. The vehicles with large mileage after re-profiling, rather than those re-profiled recently, were complained about most. Acceleration sensors were placed on the carbody floor of the complained vehicle, directly above the centre of the bogie, to get vibration characteristics of the vehicle in the lateral direction, as shown in Fig. 1. Results of the short-time Fourier transform indicate that the dominant frequency is around 1 Hz (the dark colour area in Fig. 1a). The lateral Sperling index, which reflects ride comfort, is partly beyond the limit value of 2.5 according to the Chinese national standard GB/T 5599–2019. Figure 1c and d shows the tested instantaneous lateral acceleration of the carbody in the time and frequency domains, respectively, when the vehicle speed is about 200 km/h. The vibration acceleration graph in the time domain shows prominent periodic characteristics. Fourier analysis of acceleration shows that there are dominant frequencies around 1 Hz. Obviously, this is a typical carbody swaying phenomenon caused by carbody hunting instability. It can be seen that low-frequency carbody swaying is an obvious lateral problem from the operating experience and vibration analysis results. Naturally, vehicle parameters related to the lateral direction and wheel–rail contact relationship need to be investigated and analysed.

Tested lateral acceleration of the carbody with swaying motion: a short-time Fourier transform; b lateral Sperling index; c results in time domain; d results in frequency domain
2.2 Wheel–rail contact analysis
Profile measurement of rails was conducted on the straight line where abnormal carbody swaying appears. The mileage of the measurement section is from K46 + 100 to K47 + 000, where rails on both sides in 5 sections were measured. Figure 2 illustrates the profile and contact relationship of the measured worn rails matched with the new wheel. The contact relationship of new wheels matched with worn rails could represent the vehicle that is newly manufactured or right after re-profiling. The wear of rail is averagely about 4 mm and concentrates on the rail shoulder close to the track centreline (see Fig. 2a). There are few contact points in the worn area of the rail (see Fig. 2c). Contact points on the rail concentrate on the top and side areas. The equivalent conicity of the new wheel profile matched with the new rail is about 0.04. Wear of rails leads to the decrease of equivalent conicity compared to new rail, and the average value of rails in 5 sections is 0.033 (see Fig. 2b).

Contact relationship of the measured rails matched with new wheel: a measured rail profiles; b equivalent conicity; c wheel–rail contact point pairs
Figure 3 illustrates the profile and contact relationship of the measured wheels matched with the measured worn rails above. The analysis could represent the contact relationship of the vehicle operating for large mileage. Compare the wheel profiles of a certain axle (the first axle of the third car) with the new profile (see Fig. 3a). The main wear concentrates in the rim area. The wear leads to a thinner rim which causes the equivalent conicity to be low in a larger range of wheelset lateral displacement. The wear of the tread area concentrates on the area whose abscissa is from 20 to 40 mm rather than the area around the nominal rolling circle. The protruding part of the wheel tread is worn. The worn tread area becomes straight, and the slope is low. Equivalent conicity also reflects the change caused by wheel wear (see Fig. 3b). Usually, the longer the running mileage, the deeper the wear, and the higher the equivalent conicity. However, the equivalent conicity values of worn wheelsets of the train are almost lower than that of new wheels due to the straight and low slope worn wheel tread. Statistically, the average value of equivalent conicity is 0.023. Figure 3c shows that contact points of measured wheels concentrate on the top of the rail and the rolling circle area of the wheel while that of new wheels evenly distribute in the lateral direction. Unusual wear of the wheel leads to the extreme decrease of equivalent conicity.

Contact relationship of the measured wheels matched with measured worn rails: a the measured wheel profiles and their wear depth; b equivalent conicity; c wheel–rail contact point pairs
Results show that both measured wheels and rails lead to a decrease of equivalent conicity. The average value of equivalent conicity of all the measured wheels matched with measured rails is 0.023. The measured data will also be used in the following analysis, which is the first wheelset of the third car and the rails of K47 + 000. It should be noted that the wheel–rail profiles with lower equivalent conicity are selected according to the experience that a lower equivalent conicity lead to a more severe low-frequency carbody swaying. The equivalent conicity of this group of selected measured wheel–rail profiles is 0.021.
2.3 Dynamic characteristics of dampers
A secondary lateral damper or yaw damper is connected with the carbody and has a significant influence on the carbody lateral motion. The function of the damper is to provide damping. The vehicle operation department has completed the static test of the damper on the complained trains, and the damping curve meets the provisions of relevant standards compared to the ideal curve (see Fig. 4a, the two marked points are the turning point of damping force unloading and is called an unloading point in the following). However, the damping of damper changes dynamically when the vehicle is operating. Changeable characteristics of the damper may have effects on vehicle dynamics. The velocity of the unloading point is a crucial parameter of the damper. When the relative velocity of damper pistons is beyond the velocity of the unloading point, the flow of hydraulic oil inside the damper may change and influence the damping characteristics. Figure 4b is the relative velocity data of the damper piston of another EMU train measured on a rolling and vibration test rig with a speed of 200 km/h. The maximum value of relative velocity is about 0.04 m/s, which is far greater than the velocity of the unloading point of the yaw damper (0.004 m/s) but not beyond the velocity of the unloading point of the lateral damper (0.1 m/s). Therefore, a dynamic test for lateral and yaw dampers is necessary. It should be mentioned that vehicle dampers of the same type were unavailable in our laboratory. Instead, dampers with the completely same mechanical structure from the same manufacturer were used for the dynamic test, which could also reveal the variation law of the dynamic characteristics of the damper. The velocity of the unloading point of the original lateral damper and its replaced damper is 0.1 and 0.13 m/s, respectively, while the velocity of the unloading point of the original yaw damper and its replaced damper is 0.004 and 0.003 m/s. There is little difference in the parameters of the original dampers and replaced dampers.

Characteristics of dampers: a ideal damping curve of the intercity EMU train studied in this paper; b relative velocity of damper piston of another EMU train measured on rolling and vibration test rig with a speed of 200 km/h
The dynamic damping of dampers under different amplitudes (0.5–4 mm) of vehicle swaying frequency (1 Hz) was obtained through the damper test rig (see Fig. 5c). The load on the tested damper was a sinusoidal displacement excitation. The dynamic damping value was calculated by measuring the force–displacement curve based on the method proposed in [31]. The maximum velocity of damper pistons was calculated by the velocity algorithm of the sine wave and was consistent with the damper state reflected by the test data aforementioned. The relative velocity of damper pistons is far greater than the unloading point speed of the yaw damper but not beyond that of the lateral damper. The dynamic damping of the lateral damper is basically unchanged or slightly increased (see Fig. 5a) with the increase of excitation amplitude, while the dynamic damping of the yaw damper decreases a lot from 2359.92 to 332.17 kN·s/m (see Fig. 5b). The above results are contributed to fact that all the maximum velocities of lateral damper pistons are much lower than the velocity of the unloading point and the maximum velocities of yaw damper pistons are higher than the velocity of unloading point. The damping of dampers significantly decreases after damping force unloading due to the structural system. The dynamic damping curve of the yaw damper is monotonously descending, and it can be fitted by a polynomial curve as shown in Fig. 5b. The conclusion can also be verified from the calculation results of the simulation reproduction of the car swaying (whose frequency is about 1 Hz) in subsequent Sect. 3.3 that the damping force of the lateral damper is not unloading and that of the yaw damper is unloading. In general, we can see from the rig test data and analysis that the dynamic damping of the yaw damper decreases significantly, while the dynamic damping of the lateral damper changes little relatively.

Dynamic damping test: dynamic damping under different amplitudes at 1-Hz frequency of a lateral damper and b yaw damper; c damper test rig; d tested yaw damper on the rig; e tested lateral damper on the rig
3 Numerical investigation on mechanism and solution
3.1 Linearization analysis of stability
The linear vibration differential equation [32] of the vehicle system can be expressed as
where M is the mass matrix of the vehicle system, C is the damping matrix of the vehicle suspension system, K is the stiffness matrix of the vehicle suspension system, X is the degrees of freedom (DOFs) matrix of vehicle system, and Q is the external force matrix.
The eigenvalues of the vehicle system can be obtained using the order reduction method, and the damping ratio of each pair of characteristic roots can be obtained by eigenvalues [33]. For vehicle systems with n DOFs, the eigenvalues are generally n pairs of conjugate complex roots whose general form can be expressed as
where \(\alpha_{i}\) and \(\beta_{i}\) are the real and imaginary parts of the characteristic root, respectively, and j is the imaginary unit.
The frequency of each pair of characteristic roots, which represents an inherent mode of the vehicle, can be expressed as
The damping ratio of each pair of characteristic roots, which represents an inherent mode of the vehicle, can be expressed as
The vehicle models are established according to the actual parameters (main parameters are shown in Table 1) and the structure of the intercity EMU vehicle. The vehicle models are considered as a multiple rigid-body system composed of one carbody, two bogies, and four wheelsets. All rigid bodies have six DOFs, and a total of 42 DOFs are considered. There are primary and secondary suspensions. The primary suspension is mainly composed of axle box springs, rotating arms, and vertical dampers, while the secondary suspension is mainly composed of lateral dampers, yaw dampers, air springs, lateral stops, and anti-roll torsion bars. Nonlinear characteristics of force elements are neglected for linear calculation. Dampers are established as Maxwell elements, which are the linear force elements connecting a spring and a damper in series. The other suspension elements are established as force elements with a spring and a damper in parallel. The slope of the tapered wheel tread, which is equal to equivalent conicity, is used to describe the wheel–rail contact geometry. The Kalker linear theory [34] is adopted to calculate the wheel–rail force, where spin creep is neglected.
The influence of critical parameters on vehicle stability could be analyzed by the above linear analysis method. Low-frequency carbody swaying is a typical phenomenon of insufficient lateral stability, and the minimal damping ratio of the vehicle’s different rigid-body modes can reflect the stability of the vehicle system. The lower the damping ratio is, the more unstable the vehicle system is. Considering that the frequency of carbody swaying is around 1 Hz, only the modes of vehicle system whose frequency range from 0.5 to 3 Hz are selected during the calculation and analysis. The minimum value of damping ratios of the selected modes is short as ‘minimal damping ratio’ in the following content.
Figure 6 shows the analysis results of the minimal damping ratio of vehicle rigid-body modes varying with speed and different vehicle system parameters. The wheel and rail profiles used in the analysis are new profiles. The vehicle speed range is from 50 to 300 km/h. The x-axis and y-axis at the bottom represent the changing vehicle speed and suspension parameter values, respectively, while the vertical z-axis represents the minimal damping ratio. As shown in Fig. 6a, the decrease of equivalent conicity will lead to the decrease of the minimal damping ratio. The lower the equivalent conicity, the larger the unstable velocity range. When the equivalent conicity equals 0.0185 and the speed reaches 103 km/h, for instance, the minimal damping ratio is lower than normal until the speed reaches 210 km/h. Figure 6b illustrates the effect of the yaw damper damping on the minimal damping ratio. A decrease in damping will cause a decrease in the minimal damping ratio. As the vehicle speed increases with a low damping value, the change of the minimal damping ratio is divided into two intervals. The minimal damping ratio first decreases and then increases in the first interval but keeps decreasing in the second interval. The above two different stages are caused by carbody hunting and bogie hunting, respectively. The influence of lateral damper (mounted between carbody and bogie) damping on the minimal damping ratio shows different trends (see Fig. 6c). A decreased damping value makes the minimal damping ratio decrease in the speed range of 85–175 km/h, while an increased damping value makes the minimal damping ratio decrease in the speed range of 150–250 km/h. The minimum value of the minimal damping ratio in Fig. 6c is about 1.93%. Figure 6d reveals that an increased lateral stiffness of the secondary suspension will cause a decrease in the minimal damping ratio in most of the analysed speed ranges. The primary suspension mounted between the wheelset and bogie is far away from the carbody, and as a result, the lateral stiffness of the primary suspension has little effect on stability (see Fig. 6e).

Minimal damping ratio of vehicle rigid-body modes varying with speed and different vehicle system parameters: a equivalent conicity; b damping of yaw damper; c damping of lateral damper; d lateral stiffness of the secondary suspension; e lateral stiffness of the primary suspension. The wheel and rail profiles used in the analysis are new profiles
From the above analysis results, the parameter changes can reduce the stability. However, since the minimal damping ratio is generally positive in the analysis range, the vehicle could remain stable and the low-frequency carbody swaying is unlikely to appear. The single change of wheel–rail contact relationship or suspension parameter value is not enough to destabilize the vehicle. In view of the fact that the equivalent conicity of the measured wheel–rail profiles is low, the effect of suspension on low-frequency carbody swaying is further analysed under the condition of a low wheel–rail equivalent conicity. Figure 7 shows the effect of suspension parameters on the minimal damping ratio when the measured wheel–rail profiles are adopted simultaneously, and the range of suspension parameter values remains the same as above. The minimal damping ratio is smaller under the same calculation conditions, and the minimum values under the four analysis conditions are negative. Figure 7b to d illustrates that those varying suspension values have little impact on the vehicle stability. The measured profiles are the main factor contributing to the decreased negative minimal damping ratio value, of which the minimum values are above −5%. This also shows that deviation of lateral damper, air spring, and primary suspension value from the standard value will not contribute to loss of stability with low equivalent conicity. In contrast, the decrease of yaw damper damping will significantly and adversely affect the vehicle stability, and the minimum value of the minimal damping ratio could decrease to −16% at the normal operating speed of 200 km/h.

Minimal damping ratio of vehicle rigid-body modes varying with speed and different vehicle system parameters: a damping of yaw damper; b damping of lateral damper; c lateral stiffness of the secondary suspension; d lateral stiffness of the primary suspension. The wheel and rail profiles used in the analysis are measured profiles whose wheel–rail equivalent conicity is low
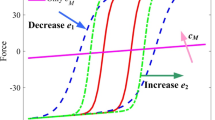
It can be seen from the above analysis that when low equivalent conicity and low yaw damper damping appear simultaneously, it will lead to the apparent decline of stability in the carbody hunting speed range. In order to reflect the effect of the above two factors on stability more clearly and intuitively, the minimal damping ratio is calculated by changing the values of equivalent conicity and damping simultaneously under the speed of 200 km/h, as shown in Fig. 8. Different curves represent different equivalent conicity values from 0.010 to 0.050. The decrease of yaw damper damping makes the minimal damping ratio decrease, and the amplitude of the decrease is larger for a lower equivalent conicity. The decrease of equivalent conicity makes the minimal damping ratio decreases too. When the equivalent conicity is below 0.030, part or all of the curve is below zero, meaning that there is a risk of instability and carbody swaying may occur. Therefore, we can take 0.030–0.035 as the critical range of the equivalent conicity to judge the occurrence of carbody swaying of this intercity EMU train.

Minimal damping ratio of vehicle rigid-body modes varying with damping of yaw damper for different equivalent conicity values
The linearization analysis and experimental investigation results could explain the occurrence of carbody swaying of this intercity EMU. When the vehicle operates with new wheels, which represents a newly manufactured vehicle or vehicle right after re-profiling, worn rails decrease the wheel–rail equivalent conicity to nearly 0.033, as shown in Fig. 2b. This equivalent conicity belongs to the critical range defined in Fig. 8, and low-frequency carbody swaying easily occurs under the condition of track line irregularity when a decrease in the yaw damper damping leads to a decrease in the minimal damping ratio (as shown in Fig. 8). The lateral swaying of the vehicle with large amplitude worsens the wear of the wheel profile. The equivalent conicity becomes consequently even lower (average 0.023) as shown in Fig. 3b, representing the vehicle operating for large mileage, and carbody swaying becomes severe. The conclusion can be drawn as follows from the above analyses in this section. Only low equivalent conicity and low damping of yaw damper exist simultaneously, leading to the speed range in which the low-frequency carbody swaying occurs. The carbody swaying is the manifestation of carbody hunting instability.
3.2 Optimization analysis
In order to reproduce the low-frequency carbody swaying and verify the feasibility of optimization, simulation models in this and next sections are established using the multi-body dynamics software SIMAPCK. The wheel–rail geometric contact relationship is considered as a real nonlinear contact relationship, and creep forces are calculated by Kalker's algorithm Fastsim [35].
Considering that a decreased equivalent conicity together with a decreased damping of yaw damper can lead to low-frequency carbody swaying, we proposed an optimization strategy based on the above two factors. Rail profiles used in the simulation model here are the same measured worn rails used above. A wheel profile with higher equivalent conicity when matched with rails is needed for the optimization strategy. The shape of the wheel profile has significant influence on railway vehicle dynamics. China's railways are managed by the China State Railway Group (CR), and any newly designed wheel profile cannot be used without the permission of CR. Permission is available when the wheel profile is verified by lots of theoretical analysis and tests supervised and proposed by CR. Therefore, the optimized wheel profile is selected from the existing profiles that can be used directly according to the Chinese standard TB/T 449–2016. Three wheel profiles, namely profile A, profile B and profile C, are defined in the standard, which is fit for the vehicle in this paper, and their equivalent conicity is around 0.1. One of the three wheel profiles that the same company of this vehicle commonly uses is selected when determining the parameters of the new damper. The unloading point determines the dynamics of the yaw damper, and the influence of velocity of the unloading point (Vu) and force of the unloading point on dynamics is analyzed. As shown in Fig. 9a, a lower velocity and a larger force at the unloading point lead to a lower lateral Sperling index and better ride comfort. However, the velocity of the unloading point needs to be as large as possible to avoid force unloading of the yaw damper. We set the velocity of the unloading point to 0.04 m/s, under which the lateral Sperling index is below the limit value of 2.5. Furthermore, the relative velocity is mostly below 0.04 m/s according to Fig. 4b, and thus, the force unloading of the yaw damper is not likely to appear. The force of the unloading point of the optimized yaw damper is determined by the minimal damping ratio, as shown in Fig. 9b. A larger force leads to a lager minimal damping ratio. The maximum force of this type of yaw damper is about 14 kN, restricted by mechanical structure. Considering the safety margin, take 5% as the judgment standard of sufficient stability. The minimal damping ratio of the unloading point with a 14 kN force and a 0.04 m/s velocity ensures sufficient stability, whereby optimized parameters of the yaw damper are proposed.

Influence of yaw damper parameters on a lateral Sperling index and b minimal damping ratio
Based on the optimized yaw damper, the three wheel profiles in the standard with a considerable equivalent conicity (around 0.107 to 0.121) were compared and analysed during optimization, as shown in Fig. 10. Among the three profiles, profile C is the profile commonly used by the same company of the vehicle. Profiles A and B are the profiles designed by other companies. The performance of profile A on lateral Sperling index and minimal damping ratio is a little worse than the other two profiles. The performance of profiles B and C is close and meets the requirement of the limited value. Therefore, profile C is chosen as the wheel profile for the optimization scheme. The equivalent conicity of the optimized wheel profile matched with the new rail and worn rail is 0.107 and 0.09, which is far larger than the critical range where carbody swaying easily occurs. Profiles (which are new) and the yaw damper damping curves of both the original and optimized parameters are shown in Fig. 11.

a Lateral Sperling index and b minimal damping ratio of different wheel profiles

Original and optimized parameters of a wheel profiles and b yaw damper damping curve
3.3 Reproduction of low-frequency carbody swaying and numerical validation
Numerical simulations are conducted to reproduce the low-frequency carbody swaying and validate the proposed optimization. The original vehicle and optimized vehicle are simulated for comparison at the speed of 200 km/h under excitations from the tested track irregularities. Information on simulation models in this section is described as follows. Wheel profiles in the original vehicle model are the measured profiles (the first wheelset of the third car), and the yaw damper damping is decreased to 27% of the original vehicle, according to the law obtained from the bench test in Fig. 5b. The wheel profile and damping curve of the optimized vehicle model are the optimized ones shown in Fig. 11. The rails of both vehicle models are the measured worn rails. The carbody lateral acceleration of the original vehicle in the time domain shows apparently a harmonic curve, whose amplitude is relatively larger during the time from 5 to 15 s, while there is no apparent harmonic curve in the optimized vehicle’s result (see Fig. 12a). In order to obtain the frequency of the harmonic curve, we select the data from 5 to 15 s of the both vehicle models for Fourier analysis. As shown in Fig. 12b, the original vehicle has an obvious dominant frequency around 1 Hz, and the amplitude of other frequencies is much smaller. There is no dominant frequency around 1 Hz in the optimized vehicle, and its maximum amplitude is around 1.5 Hz but is not much larger than other frequencies. The time domain and frequency frequency-domain analysis results reproduce the low-frequency carbody swaying under the original parameters and prove that the optimization can effectively relieve low-frequency carbody swaying. Figure 12c and d shows the velocity of two kinds of dampers’ pistons of the original vehicle. When carbody swaying appears, the velocity of the yaw damper is far beyond its unloading velocity of 0.004 m/s, while the velocity of the lateral damper is almost within its unloading velocity of 0.1 m/s. The velocity of the damper piston verifies that the damping force of the yaw damper is unloading, but the damping force of the lateral damper is not unloading when low-frequency carbody swaying appears.

Low-frequency carbody hunting reproduction and numerical validation of optimization: lateral acceleration of carbody in a time domain and b frequency domain; velocity of c yaw damper piston and d lateral damper piston of the original vehicle in low-frequency hunting motion
We conducted more analysis to prove the feasibility of the optimization scheme. The amplitude of limit circle is calculated by the speed deceleration method in this paper. Initial vehicle speed of the simulation is 600 km/h, and the lateral displacement of wheelsets is set to 6 mm to make the amplitude of limit circle be an enormous value. The simulation using the speed deceleration method consists of several calculation conditions with different vehicle speeds with an interval of 25 km/h. During simulation, different calculation conditions shall be carried out in an order from high to low vehicle speed. Initial model state of each calculation condition takes the final model state of the previous calculation condition. The amplitude of limit circle is shown in Fig. 13a. The critical speed of the original and optimized vehicle is 175 and 500 km/h, respectively. Lack of carbody hunting stability leads to a low critical speed of the original vehicle. Although an increased equivalent conicity of the optimized vehicle will reduce the critical speed of the vehicle, an increased force of the yaw damper unloading point can make up for this deficiency. As a result, the critical speed of the optimized vehicle is high due to the increase of the yaw damper unloading force. The ride comfort of the vehicle is evaluated by Sperling index based on the Chinese national standard GB/T 5599–2019, as shown in Fig. 13b. Vertical Sperling indexes of both the original and optimized vehicles are close when the vehicle speed is below 140 km/h. As carbody swaying occurs, the vertical Sperling index of the original becomes larger than that of the optimized vehicle when the vehicle speed is beyond 140 km/h. The lateral Sperling index of the optimized vehicle is larger than that of the original vehicle when the vehicle speed is below 140 km/h due to the increased equivalent conicity of the optimized wheel profile. Similarly, the lateral Sperling index of the original vehicle becomes larger than that of the optimized vehicle due to carbody swaying when the vehicle speed exceeds 140 km/h. The value of the original vehicle is beyond the limit value when the vehicle speed is beyond 200 km/h. In fact, more vehicle performance analyses have been completed in our simulations, but are not all shown here in consideration of the limited length of the paper. The optimized vehicle meets the requirements specified in relevant standards. A large number of aforementioned simulations and analyses show that the optimized vehicle has good dynamics performance and can relieve abnormal low-frequency carbody swaying.

Simulation comparison of the original and optimized vehicles on a amplitude of limit circle and b Sperling index; c amplitude of limit circle and d Sperling index of the optimized vehicle with high-equivalent-conicity (0.4) worn wheels
Furthermore, the dynamic performance of the optimized vehicle during the operation period, especially with high wheel–rail equivalent conicity, is indeed worthy of attention. Calculation of the critical speed of the optimized vehicle with large mileage is conducted as shown in Fig. 13c. Its wheel profile is the measured profile whose mileage is close to the repair mileage limit. The equivalent conicity of the measured profile is 0.4 and 0.25 when matched with new rail and worn rail, respectively. Wheel–rail profiles with a high equivalent conicity (0.4) are expected to have worse performance and are selected for prediction, where the worn wheel is matched with the new rail. The nonlinear critical speed is 275 km/h, which is sufficient for this intercity EMU train with a maximum operating speed of 200 km/h. The Sperling indexes are also below the limit value of 2.5 when the vehicle speed is lower than the maximum operating speed of 200 km/h, as shown in Fig. 13d.
4 Experimental validation
In order to verify the optimization scheme, a field test was conducted on a train in operation. The tested train was an 8-unit train. The first four vehicles of the train maintained the original parameters, and the four vehicles in the rear were transformed into the optimization scheme (Fig. 14). The optimization scheme included changing the wheel profile and yaw damper mentioned above. All the wheels were re-profiled to the new state. The acceleration sensors were installed on the floor of the cab, which is directly above the bogie center of the front and rear vehicles, as shown in Fig. 14. A GPS sensor was also mounted to record the train location. The tested train operated back and forth in the section. In order to avoid the influence of other factors, accelerations of vehicles No.1 and No.8, which were operating as the tail of the train in turn in the same line section, are compared as shown in Fig. 15. This tested railway line is basically in a north–south direction. The latitude as the abscissa in the figure reflects the location of the train, which conveniently allows us to observe the accelerations of the original and optimized vehicles at the same location under the same external conditions. Figure 15c shows that the acceleration amplitude of the optimized vehicle (green line) is slightly lower than that of the original vehicle (black line). An enlarged acceleration image could better reflect the difference between the two vehicles, as shown in Fig. 15a and b. From the view in the time domain, the lateral acceleration of the original vehicle is nearly harmonic, while the lateral acceleration of the optimized vehicle does not show obvious harmonic characteristics. In addition, the acceleration in the frequency domain shows the same characteristics. There is an obvious dominant frequency (0.87 Hz) for the acceleration of the original vehicle, but no obvious dominant frequency for the acceleration of the optimized vehicle. Overall, the optimization scheme successfully suppresses low-frequency carbody swaying.

Acceleration sensor mounted on the floor of carbody

Tested lateral acceleration results of the original and optimized vehicles in the field test: enlarged image of acceleration in a time domain and b frequency domain; c lateral acceleration of carbody in time domain; d lateral Sperling index; short-time Fourier transform analysis of e original vehicle and f optimized vehicle (operating at the tail of the train)
The difference in the lateral acceleration of the vehicle body also leads to a difference in the ride comfort evaluation index, i.e., the lateral Sperling index. The value of the lateral Sperling index of the optimized vehicle is obviously lower than that of the original vehicle, which means the ride comfort of the optimized vehicle is better. The limit value in the standard is 2.5 (red dotted line). The original vehicle is beyond the limit value many times, while the optimized vehicle is hardly beyond the limit value. In order to obtain the frequency-domain characteristics of the vehicle related to carbody swaying, a short-time Fourier transform (STFT) is applied (Fig. 15e and f). Different colors represent different amplitudes according to the color map. The original vehicle has obvious dark color concentration around 1 Hz, while the optimized vehicle has little, which indicates that only the original vehicle appears to have severe carbody swaying around 1 Hz. The comparison proves that the optimization scheme is successful and could relieve the appearance of low-frequency carbody swaying and improve ride comfort.
Ride comfort could also reflect the effect of the optimization scheme, as shown in Fig. 16. All test data are drawn in the form of discrete points whose ordinate is the lateral Sperling index, and the abscissa is its corresponding vehicle speed. The lateral Sperling index of the original and optimized vehicles are compared when the vehicles are both operating as tail of the train. It should be pointed out that the lateral Sperling index of the optimized vehicle is worse around the speed of 40 km/h, while the lateral Sperling index of the original vehicle is worse around the speed of 20 km/h. This phenomenon could be explained from the tested latitude data, which showed that the train was passing through a small radius curve when the Sperling index became worse. This small radius curve leaded to severe wheel–rail contact force and worsened lateral Sperling index. The values of the original vehicle are obviously greater than the optimized vehicle in the speed range from 155 to 200 km/h. This speed range is exactly where the carbody swaying of the original vehicle occurs. From the above statistical results, we see that the proposed optimization scheme can suppress abnormal carbody swaying and improve ride comfort. Therefore, the optimization schemes are successful.

Statistics of ride comfort index of the original and optimized vehicles operating as tail of the train
5 Conclusions
The low-frequency carbody swaying phenomenon of intercity EMU train and its mechanism were studied experimentally and numerically in this paper. The corresponding solutions were proposed on the basis of mechanism analysis and verified by field test. The following conclusions can be drawn:
-
(1)
The decrease of equivalent conicity together with the decrease of yaw damper dynamics damping contributes to carbody hunting instability, and low-frequency carbody swaying then occurs caused by instability.
-
(2)
Wear of rail concentrates on the inner rail shoulder, which makes contact points on the wheel flange mostly transfer to wheel tread. Wear of wheel concentrates on the wheel flange and the protruding part of the wheel tread. Wear of the wheel and rail both leads to the decrease of equivalent conicity and makes the equivalent conicity low in a larger range of wheelset lateral displacement.
-
(3)
Dynamic tests of dampers show that under the condition of low-frequency carbody swaying, the damping force of the lateral damper was not unloading and the dynamic damping varied little, while the damping force of the yaw damper was unloading and the dynamic damping decreased a lot.
-
(4)
The parameters optimization of replacing wheel profile (with a higher equivalent conicity around 0.1) and yaw damper (with a higher velocity of unloading point) was put forward and verified by simulation and comparative field test. The field test showed that optimization could significantly relieve the low-frequency carbody swaying around 1 Hz and improve the lateral ride comfort.
References
Knothe K, Bohm F (1999) History of stability of railway and road vehicles. Veh Syst Dyn 31(5–6):283–323
Yao Y, Li G, Sardahi Y et al (2019) Stability enhancement of a high-speed train bogie using active mass inertial actuators. Veh Syst Dyn 57(3):389–407
Zhai W, Liu P, Lin J et al (2015) Experimental investigation on vibration behaviour of a CRH train at speed of 350 km/h. Int J Rail Transp 3(1):1–16
Sun JF, Chi MR, Jin XS et al (2021) Experimental and numerical study on carbody hunting of electric locomotive induced by low wheel–rail contact conicity. Veh Syst Dyn 59(2):203–223
Kumar V, Rastogi V, Pathak PM (2019) Modelling and evaluation of the hunting behaviour of a high-speed railway vehicle on curved track. Proc Inst Mech Eng Part F-J Rail Rapid Transit 233(2):220–236
Sun JF, Chi MR, Cai WB et al (2021) An investigation into evaluation methods for ride comfort of railway vehicles in the case of carbody hunting instability. Proc Inst Mech Eng Part F-J Rail Rapid Transit 235(5):586–597
Zeng J, Wei L, Wu P (2016) Safety evaluation for railway vehicles using an improved indirect measurement method of wheel–rail forces. J Mod Transp 24:114–123
Sun JF, Chi MR, Wu XW et al (2018) Hunting motion stability of wheelset based on energy method. J Traff Transp Eng 18(2):82–89 (in Chinese)
Chen XW, Yao Y, Shen LJ et al (2022) Multi-objective optimization of high-speed train suspension parameters for improving hunting stability. Int J Rail Transp 10(2):159–176
Sun JF, Chi MR, Jiao WD et al (2022) Modal parameters-based hunting stability analysis of high-speed railway vehicles considering full range of equivalent conicity. Proc Inst Mech Eng Pt K-J Multi-Body Dyn 236(3):422–439
Sun JF, Meli E, Cai WB et al (2021) A signal analysis based hunting instability detection methodology for high-speed railway vehicles. Veh Syst Dyn 59(10):1461–1483
Zboinski K, Dusza M (2006) Development of the method and analysis for non-linear lateral stability of railway vehicles in a curved track. Veh Syst Dyn 44(sup1):147–157
True H, Jensen JC (1994) Parameter study of hunting and chaos in railway vehicle dynamics. Veh Syst Dyn 23(sup1):508–521
Ahmadian M, Yang SP (1998) Hopf bifurcation and hunting behavior in a rail wheelset with flange contact. Nonlinear Dyn 15(1):15–30
Zboinski K, Dusza M (2017) Bifurcation analysis of 4-axle rail vehicle models in a curved track. Nonlinear Dyn 89(2):863–885
Sun JF, Meli E, Song XW et al (2022) A novel measuring system for high-speed railway vehicles hunting monitoring able to predict wheelset motion and wheel/rail contact characteristics. Veh Syst Dyn. https://doi.org/10.1080/00423114.2022.2086145
Wang FC, Liao MK (2010) The lateral stability of train suspension systems employing inerters. Veh Syst Dyn 48(5):619–643
Yao Y, Li G, Wu GS et al (2020) Suspension parameters optimum of high-speed train bogie for hunting stability robustness. Int J Rail Transp 8(3):195–214
Ashtiani IH (2017) Optimization of secondary suspension of three-piece bogie with bevelled friction wedge geometry. Int J Rail Transp 5(4):213–228
Matsudaira T (1965) Hunting problem of high-speed railway vehicles with special reference to bogie design for okaidow tokaido line. Proceed Inst Mech Eng 180(6):58–66
Wang JC, Ling L, Ding X et al (2022) The influence of aerodynamic loads on carbody low-frequency hunting of high-speed trains. Int J Struct Stab Dyn 22(13):1–20
Zeng XH, Lai J, Wu H (2018) Hunting stability of high-speed railway vehicles under steady aerodynamic loads. Int J Struct Stab Dyn 18(7):1–30
Wickens AH (2003) Fundamentals of rail vehicle dynamics. Lisse, Netherlands
Stichel S (1999) On freight wagon dynamics and track deterioration. Proc Inst Mech Eng Part F-J Rail Rapid Transit 213(4):243–254
Fujimoto H, Miyamoto H (1996) Measures to reduce the lateral vibration of the tail car in a high speed train. Proc Inst Mech Eng Part F-J Rail Rapid Transit 210(2):87–93
Gong J, Hou B, Wang J et al (2019) Influence of rail profile grinding on running performance of emu. Rail Eng 59(5):145–149 (in Chinese)
Feng Y, Zhang Z, Liang H et al (2021) Research on the causes and improvement measures for low-frequency shaking of emu. Railw Locomot Car 41(5):11–16 (in Chinese)
Cheng D, Sun C, Hu X et al (2020) Wheel profile optimization of crh3 emu oriented to carbody shaking caused by low equivalent conicity. China Railw Sci 41(6):135–144 (in Chinese)
Huang CH, Zeng J, Liang SL (2013) Carbody hunting investigation of a high speed passenger car. J Mech Sci Technol 27(8):2283–2292
Xia ZH, Zhou JS, Liang JY et al (2021) Online detection and control of car body low-frequency swaying in railway vehicles. Veh Syst Dyn 59(1):70–100
Dai LC, Chi MR, Guo ZT et al (2023) A physical model-neural network coupled modelling methodology of the hydraulic damper for railway vehicles. Veh Syst Dyn 61(2):616–637
Yao Y, Chen XW, Li H et al (2022) Suspension parameters design for robust and adaptive lateral stability of high-speed train. Veh Syst Dyn. https://doi.org/10.1080/00423114.2022.2062012
Hermans L, Van der Auweraer H (1999) Modal testing and analysis of structures under operational conditions: industrial applications. Mech Syst Signal Proc 13(2):193–216
Kalker JJ (1979) Survey of wheel–rail rolling contact theory. Veh Syst Dyn 8:317–358
Kalker JJ (2007) A fast algorithm for the simplified theory of rolling contact. Veh Syst Dyn 11:1–13
Acknowledgements
This work was supported by the National Key R&D Program of China under grant number 2018YFB1201701.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, Y., Chi, M., Guo, Z. et al. An abnormal carbody swaying of intercity EMU train caused by low wheel–rail equivalent conicity and damping force unloading of yaw damper. Rail. Eng. Science 31, 252–268 (2023). https://doi.org/10.1007/s40534-022-00295-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40534-022-00295-w