
Abstract
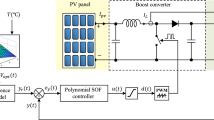
This paper describes the development of a new quadratic optimal controller for discrete-time systems with integral action and subject to non-manipulable and possibly non-measurable external inputs or disturbances. The proposed controller is a linear quadratic regulator (LQR) based on an augmented state-space that aims to include the integral of error and disturbance modeling in the solution. For cases where the disturbance is not measured, this controller is applied in conjunction with a specific Kalman filter for estimating non-measurable inputs. The new controller is applied to maximum power point tracking (MPPT) simulations for photovoltaic systems and compared using the perturb and observe method. MPPT is performed by controlling the duty cycle of a DC-DC boost converter connected to the output of the photovoltaic system. The case studies seek to evaluate controller performance regarding variations in temperature and irradiance, measurement noises, and uncertainties in the model. The results show that the new controller is able to increase system efficiency while reducing costs associated with implementing current, voltage, and irradiance filters and sensors.















Similar content being viewed by others

Availability of data and materials
The irradiance data used in this study are available in http://sonda.ccst.inpe.br/.
Notes
For discretization, using the usual state-space discretization method with zero-order holder and sampling time \( T_s \), the system is rewritten with input matrix defined as \( [{\mathcal {A}} \text { } {\mathcal {E}}] \) and the resultant matrix is separated in G and E.
References
Kalman RE (1960) Contributions to the theory of optimal control. Bol Soc Mat Mexicana 5(2):102–119
Tajdari F, Toulkani NE, Zhilakzadeh N (2020) Intelligent optimal feed-back torque control of a 6DOF surgical rotary robot. In: 2020 11th power electronics, drive systems, and technologies conference, PEDSTC 2020. https://doi.org/10.1109/PEDSTC49159.2020.9088382
Yaghobipour S, Yarahmadi M (2020) Solving quantum stochastic LQR optimal control problem in Fock space and its application in finance. Comput Math Appl 79(10):2832–2845. https://doi.org/10.1016/j.camwa.2019.12.016
Jung H, Jung D, Choi SB (2022) LQR control of an all-wheel drive vehicle considering variable input constraint. IEEE Trans Control Syst Technol 30(1):85–96. https://doi.org/10.1109/TCST.2021.3051233
Sadek L, Abouzaid B, Sadek EM, Alaoui HT (2023) Controllability, observability and fractional linear-quadratic problem for fractional linear systems with conformable fractional derivatives and some applications. Int J Dyn Control 11(1):214–228. https://doi.org/10.1007/s40435-022-00977-7
Feng Z-PP, Zhu JMJ, Robert A, Allen R (2007) Design of continuous and discrete LQI control systems with stable inner loops. J Shanghai Jiaotong Univ Sci E–12(6):787–792
Smith J, Su J, Liu C, Chen WH (2017) Disturbance observer based control with anti-windup applied to a small fixed wing UAV for disturbance rejection. J Intell Robotic Syst Theory Appl 88(2–4):329–346. https://doi.org/10.1007/s10846-017-0534-5
Masajedi P, Ghanbarzadeh A (2013) Optimal controller designing based on linear quadratic regulator technique for an unmanned helicopter at hover with the presence of wind disturbance. Int J Dyn Control 1(3):214–222. https://doi.org/10.1007/s40435-013-0019-8
Singh AK, Pal BC (2017) An extended linear quadratic regulator for LTI systems with exogenous inputs. Automatica 76:10–16. https://doi.org/10.1016/j.automatica.2016.10.014
Hoang D, Pham NT, Le XH, Do DM, Nguyen NL, Kim TD (2023) Adaptive cooperation of optimal linear quadratic regulator and lumped disturbance rejection estimator-based tracking control for robotic manipulators. Int J Dyn Control. https://doi.org/10.1007/s40435-023-01144-2
Ostertag E, Goyena R (2011) Mono and multivariable control and estimation. Springer, Berlin, pp 1689–1699. https://doi.org/10.1007/978-3-642-13734-1
Darouach M, Zasadzinski M, Onana AB, Nowakowski S, Bassong OA, Nowakowski S (1995) Kalman filtering with unknown inputs via optimal state estimation of singular systems. Int J Syst Sci 26(10):2015–2028. https://doi.org/10.1080/00207729508929152
Madureira VS, das Chagas TP, de Jesus GQ (2020) Solar irradiance estimation using Kalman filter. J Control Autom Electr Syst 31(6):1447–1457. https://doi.org/10.1007/s40313-020-00649-x
Lewis FL, Vrabie DL, Syrmos VL (2012) Optimal control. Wiley, Hoboken
Hsieh CS (2000) Robust two-stage Kalman filters for systems with unknown inputs. IEEE Trans Autom Control 45(12):2374–2378. https://doi.org/10.1109/9.895577
Sumathi S, Ashok Kumar L, Surekha P (2015) Solar PV and wind energy conversion systems. green energy and technology. Cham, Springer. https://doi.org/10.1007/978-3-319-14941-7
Podder AK, Roy NK, Pota HR (2019) MPPT methods for solar PV systems: a critical review based on tracking nature. IET Renew Power Gener 13(10):1615–1632. https://doi.org/10.1049/iet-rpg.2018.5946
Mao M, Cui L, Zhang Q, Guo K, Zhou L, Huang H (2020) Classification and summarization of solar photovoltaic MPPT techniques: a review based on traditional and intelligent control strategies. Energy Rep 6(174):1312–1327. https://doi.org/10.1016/j.egyr.2020.05.013
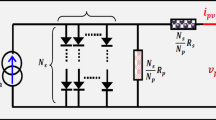
Tian H, Mancilla-David F, Ellis K, Muljadi E, Jenkins P (2012) A cell-to-module-to-array detailed model for photovoltaic panels. Solar Energy 86(9):2695–2706. https://doi.org/10.1016/j.solener.2012.06.004
Scolari E, Sossan F, Paolone M (2018) Photovoltaic-model-based solar irradiance estimators: performance comparison and application to maximum power forecasting. IEEE Trans Sustain Energy 9(1):35–44. https://doi.org/10.1109/TSTE.2017.2714690. arXiv:1705.04132
Tan RHG, Tai PLJ, Mok VH (2013) Solar irradiance estimation based on photovoltaic module short circuit current measurement. In: IEEE international conference on smart instrumentation, measurement and applications (ICSIMA) (November), 26–27
Nguyen XH, Nguyen MP (2015) Mathematical modeling of photovoltaic cell/module/arrays with tags in Matlab/Simulink. Environ Syst Res 4(1):24. https://doi.org/10.1186/s40068-015-0047-9
Laudani A, Fulginei FR, Salvini A, Carrasco M, Mancilla-David F (2016) A fast and effective procedure for sensing solar irradiance in photovoltaic arrays. In: EEEIC 2016-international conference on environment and electrical engineering (3), 0–3. https://doi.org/10.1109/EEEIC.2016.7555541
Ayop R, Tan CW (2018) Design of boost converter based on maximum power point resistance for photovoltaic applications. Solar Energy 160:322–335. https://doi.org/10.1016/j.solener.2017.12.016
Karanjkar DS, Chatterji S, Kumar A (2014) Development of linear quadratic regulator based PI controller for maximum power point tracking in solar photo-voltaic system. In: 2014 recent advances in engineering and computational sciences, RAECS, pp 6–8. https://doi.org/10.1109/RAECS.2014.6799657
National Institute for Space Research - INPE: National system of ambiental data organization - SONDA (2018). http://sonda.ccst.inpe.br/
Scolari E, Sossan F, Haure-Touzé M, Paolone M (2018) Local estimation of the global horizontal irradiance using an all-sky camera. Solar Energy 173:1225–1235. https://doi.org/10.1016/j.solener.2018.08.042
Mp A, Kanthalakshmi S (2016) Linear quadratic optimal control of solar photovoltaic system: an experimental validation. J Renew Sustain Energy. https://doi.org/10.1063/1.4966229
Karanjkar DS, Chatterji S, Kumar A (2014) Design and implementation of a linear quadratic regulator based maximum power point tracker for solar photo-voltaic system. Int J Hybrid Inf Technol 7(1):167–182. https://doi.org/10.14257/ijhit.2014.7.1.14
Rezk H, Eltamaly AM (2015) A comprehensive comparison of different MPPT techniques for photovoltaic systems. Solar Energy 112:1–11. https://doi.org/10.1016/j.solener.2014.11.010
Fard M, Aldeen M (2017) Linear Quadratic Regulator design for a hybrid photovoltaic-battery system. In: 2016 Australian control conference, AuCC 2016, pp 347–352. https://doi.org/10.1109/AUCC.2016.7868214
Al-Smadi MK, Hu Y, Mahmoud Y (2018) LQR-based PID voltage controller for photovoltaic systems. In: Proceedings: IECON 2018-44th annual conference of the IEEE industrial electronics society 1:1854–1859. https://doi.org/10.1109/IECON.2018.8591393
Labidi Z, Schulte H, Mami A (2019) A systematic controller design for a photovoltaic generator with boost converter using integral state feedback control. Eng Technol Appl Sci Res 9(2):4030–4036
Abdelmalek S, Dali A, Bettayeb M (2019) An improved observer-based integral state feedback (OISF) control strategy of flyback converter for photovoltaic systems. In: Proceedings of 2018 3rd international conference on electrical sciences and technologies in Maghreb, CISTEM 2018, pp 1–6. https://doi.org/10.1109/CISTEM.2018.8613565
Li Q, Baran ME (2019) A novel frequency support control method for PV plants using tracking LQR. IEEE Trans Sustain Energy 11(4):2263–2273. https://doi.org/10.1109/tste.2019.2953684
Rahideh M, Niasar AH, Ketabi A (2020) Linear quadratic integral optimal control of photovoltaic systems. AUT J Electr Eng 52(2):231–242. https://doi.org/10.22060/eej.2020.14970.5249
Funding
This study was financed in part by the Coordenacso de Aperfeicoamento de Pessoal de Nível Superior – Brasil (CAPES) – Finance Code 001. This work was supported by Universidade Estadual de Santa Cruz, grant number 073.6766.2019.0021797-78.
Author information
Authors and Affiliations
Contributions
All authors contributed to thestudy conception and design. Material preparation, data collection and analysis were performed by ViníciusSouza Madureira, Thiago Pereira das Chagas and Gildson Queiroz de Jesus. The first draft of the manuscriptwas written by Vinícius Souza Madureira and all authors commented on previous versions of the manuscript.All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
A proof of theorem 1
A proof of theorem 1
The system (1) can be rewritten in augmented form as
where
Through of (64), the Problem (2) can be rewritten as
with
where the submatrices of \( {{\mathcal {P}}}_k \) are known, symmetric, positive semi-definite weighting matrices with appropriate dimensions.
The problem (65–66) can be solved as a classic LQR problem with the solution given by [14]:
1.1 A.1 Control law
Substituting (64) and (66) in (67) results in
which can be simplified to
and reorganized as follow
or
with
as presented in the Theorem 1.
1.2 A.2 Riccati equation
Substituting (64) and (66) in 68) results in
which can be simplified to
By defining \(\Psi :={{G}_{k}}{{\left( {{R}_{k}}+G_{k}^{T}P{{_{k+1}^{x}}_{k+1}}{{G}_{k}} \right) }^{-1}}G_{k}^{T}={{G}_{k}}{{\Phi }_{k}}\), the above equation become
which is expanded to
Performing the two matrices multiplications results in
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Madureira, V.S., das Chagas, T.P. & de Jesus, G.Q. Integral linear quadratic Gaussian regulator subject to unknown inputs: application in photovoltaic systems. Int. J. Dynam. Control 12, 1477–1490 (2024). https://doi.org/10.1007/s40435-023-01282-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-023-01282-7