
Abstract
In this paper, Lagrangian method is proposed to formulate dynamic model for a mechatronic elevator system, which includes mechanical and electrical parts. Lagrange equations, i.e. the torque balance equation and voltage balance equation, are derived from the kinetic energy, potential energy and virtual work of the mechatronic system. From the dynamic equations, the energy balance equation is obtained including electromagnetic energy, electrical dissipation energy, mechanical kinetic energy, mechanical dissipation energy, and the mechanical potential energy. The minimum-energy trajectory by using Fourier sine series (FSS) and power series are found by real-coded genetic algorithm. From simulation results, it is found that FSS with less order can find the minimum input energy more quickly than the power series. The four-degree (4-D) FSS trajectory is given as a reference one for the adaptive tracking control. It is found that the proposed adaptive controller has good tracking performance for the 4-D FSS angular displacement and velocity.








Similar content being viewed by others

References
De Wit CC, Seleme SI Jr (1997) Robust torque control design for induction motors: the minimum energy approach. Automatica 33(1):63–79
Yoram H, Emanuele C, Giuseppe M (2014) Minimum energy control of redundant linear manipulators. Trans ASME J Dyn Syst Meas Control 136(5):1–8
Dhanakorn I, Santosh D (2009) Minimum-time/energy, output transitions for dual-stage systems. Trans ASME J Dyn Syst Meas Control 131(2):1–8
Hongjun K, Byung KK (2014) Online minimum-energy trajectory planning and control on a straight-line path for three-wheeled omnidirectional mobile robots. IEEE Trans Ind Electr 61(9):4771–4779
Murphey YL, Park J, Kilaris L, Kuang ML, Masrur MA, Phillips AM, Wang Q (2013) Intelligent hybrid vehicle power control-part II: online intelligent energy management. IEEE Trans Veh Technol 62(1):69–79
Ebrahim OS, Badr MA, Elgendy AS, Jain PK (2010) ANN-based optimal energy control of induction motor drive in pumping applications. IEEE Trans Energy Convers 25(3):652–660
Huang MS, Hsu YL, Fung RF (2012) Minimum-energy point-to-point trajectory planning for a motor-toggle servomechanism. IEEE/ASME Trans Mechatron 17(2):337–344
Chen KY, Huang MS, Fung RF (2011) The comparisons of minimum-energy control of the mass-spring-damper system. In Proceedings of the 8th World Congress on Intelligent Control and Automation, June 21–25, Taipei, Taiwan, pp 666–671
Chen KY, Huang MS, Fung RF (2012) Adaptive tracking control for a motor-table system. In The IEEE/ASME international conference on advanced intelligent mechatronics, Kaohsiung, Taiwan, pp 1054–1059
Chen KY, Fung RF (2015) Adaptive tracking control the minimum-energy trajectory for a mechatronic motor-table system. IEEE/ASME Trans Mechatron 20(6):2795–2804
Chen KY, Fung RF (2017) A Mechatronic motor-table system identification based on an energetics fitness function. IEEE/ASME Trans Mechatron 22(5):2288–2295
Chen KY, Huang MS, Fung RF (2017) Adaptive minimum-energy tracking control for the mechatronic elevator system. IEEE Trans Control Syst Technol 25(5):1790–1799
Chen KY, Huang MS, Fung RF (2014) Dynamic modelling and input-energy comparison for the mechatronic elevator system. Appl Math Model 38:2037–2050
Chen KY, Fung RF (2015) Energy comparisons of the adaptive tracking control for a linear drive system. Appl Mech Mater 764–765:602–606
Chen KY, Fung RF (2013) Minimum input energy trajectory design of the mechatronic elevator system. Adv Mater Res 740:68–73
Haupt RL, Haupt SE (1997) Practical genetic algorithms. Interscience, New York
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
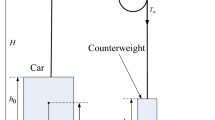
In this appendix, we derive the potential energy of the mechatronic elevator system. The cable height of the elevator system is measured from the position of mass center of the cable to the ground.
The initial height and length of the cable for the car are
The differential potential energy \(U_{c}\) of the car is
Integrating Eq. (A2a), one can find that
Substituting \(l_{c}\) in Eq. (A1a) into Eq. (A1b), we have
The initial height and length of the cable for the counterweight are
The differential potential energy \(U_{w}\) of the counterweight can be found
Integrating Eq. (A5a), one can find that
Substituting \(l_{w}\) in Eq. (A4a) into Eq. (A5b), one can obtain
Finally, the total potential energy \(U_{b}\) of the cable can be obtained as follows
where \(U_{b}\) is the total potential energy of cable.
Appendix B
The general Fourier series with sine–cosine form is shown as follows:
where \(a_{n}\) and \(b_{n}\) are Fourier coefficients, and \(n = 0,1,2,\ldots ,\infty .\)
The trajectory of angular displacement \( \, \theta (t)\), angular velocity \(\omega (t)\) and angular acceleration \(\alpha (t)\) by using Fourier series with \(n = 2\) are described as follows:
where \(a_{0} ,\) \(a_{1} ,\) \(a_{2} ,\) \(b_{1} ,\) and \(b_{2}\) are the unknown coefficients to be determined by initial- and final-time conditions. When the initial- and final-time conditions are \(\theta (0) = 0,\) \(\theta (1) = 1,\) \(\omega (0) = 0,\) \(\omega (1) = 0,\) \(\alpha (0) = 0,\) and \(\alpha (1) = 0,\) the coefficient equations can be obtained as follows:
Because there are six initial- and final-time conditions, and only five unknown coefficients (\(a_{0} ,\) \(a_{1} ,\) \(a_{2} ,\) \(b_{1} ,\) and \( \, b_{2}\)), therefore, one can not exactly solve the five unknown coefficients by using Fourier series with sine–cosine form.
Moreover, Fourier series with cosine form is shown as follows:
where \(a_{n}\) is Fourier coefficients with \(n = 0,1,2\ldots ,\infty .\)
The trajectory of angular displacement \( \, \theta (t)\), angular velocity \(\omega (t)\) and angular acceleration \(\alpha (t)\) by using Fourier series with \(n = 5\) are described as follows:
where \(a_{0} ,\) \(a_{1} ,\) \(a_{2} ,\) \(a_{3} ,\) \(a_{4} ,\) and \(a_{5}\) are the unknown coefficients to be determined by initial- and final-time conditions. When the initial- and final-time conditions are \(\theta (0) = 0,\) \(\theta (1) = 1,\) \(\omega (0) = 0,\) \(\omega (1) = 0,\) \(\alpha (0) = 0,\) and \(\alpha (1) = 0,\) the coefficients can be solved as follows:
It is seen that there are five initial- and final-time conditions, and six unknown coefficients (\(a_{0} ,\) \(a_{1} ,\) \(a_{2} ,\) \(a_{3} ,\) \(a_{4} ,\) and \( \, a_{5}\)), one also can not exactly solve the six unknown coefficients by using the cosine form of Fourier series.
Rights and permissions
About this article

Cite this article
Chen, KY., Huang, MS. & Fung, RF. Energy-saving trajectory planning by using Fourier sine series and tracking control for a mechatronic elevator system. Int. J. Dynam. Control 9, 1545–1558 (2021). https://doi.org/10.1007/s40435-021-00768-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-021-00768-6